Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Synaptogenesis wikipedia , lookup
Time perception wikipedia , lookup
Activity-dependent plasticity wikipedia , lookup
Neural engineering wikipedia , lookup
Mirror neuron wikipedia , lookup
Caridoid escape reaction wikipedia , lookup
Executive functions wikipedia , lookup
Stimulus (physiology) wikipedia , lookup
Recurrent neural network wikipedia , lookup
Cortical cooling wikipedia , lookup
Apical dendrite wikipedia , lookup
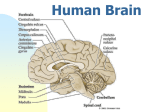
Human brain wikipedia , lookup
Neural coding wikipedia , lookup
Molecular neuroscience wikipedia , lookup
Aging brain wikipedia , lookup
Types of artificial neural networks wikipedia , lookup
Holonomic brain theory wikipedia , lookup
Neural oscillation wikipedia , lookup
Environmental enrichment wikipedia , lookup
Neuroanatomy wikipedia , lookup
Neuroanatomy of memory wikipedia , lookup
Neuroeconomics wikipedia , lookup
Multielectrode array wikipedia , lookup
Clinical neurochemistry wikipedia , lookup
Embodied language processing wikipedia , lookup
Circumventricular organs wikipedia , lookup
Cognitive neuroscience of music wikipedia , lookup
Neuroplasticity wikipedia , lookup
Central pattern generator wikipedia , lookup
Metastability in the brain wikipedia , lookup
Optogenetics wikipedia , lookup
Nervous system network models wikipedia , lookup
Neural correlates of consciousness wikipedia , lookup
Development of the nervous system wikipedia , lookup
Basal ganglia wikipedia , lookup
Neuropsychopharmacology wikipedia , lookup
Motor cortex wikipedia , lookup
Synaptic gating wikipedia , lookup
Channelrhodopsin wikipedia , lookup
Feature detection (nervous system) wikipedia , lookup
Cerebral cortex wikipedia , lookup
Feature Article Distributed Modular Architectures Linking Basal Ganglia, Cerebellum, and Cerebral Cortex: Their Role in Planning and Controlling Action The motor system includes structures distributed widely through the CNS. and in this feature article we present a scheme for how they might cooperate in the control of action. Distributed modules, which constitute the basic building blocks of our model, include recurrent loops connecting distant brain structures, as well as local circuitry that modulates loop activity. We consider interconnections among the basal ganglia, cerebellum, and cerebral cortex and the specialized properties of certain cell types within each of those structures. namely. striatal spiny neurons, cerebellar Purkinje cells, and neocortical pyramidal cells. In our model, striatal spiny neurons of the basal ganglia function in contextual pattern recognition under the training influence of reinforcement signals transmitted in dopamine fibers. Cerebellar Purkinje cells also function in pattern recognition, in their case to select and execute actions through training supervised by climbing fibers, which signal discoordination. Neocortical pyramidal cells perform collective computations learned through a localtraining mechanism and also function as information stores for other modular operations. We discuss how distributed modules might function in a parallel. cooperative manner to plan, modulate, and execute action. Modularity has emerged as an important architectural principle of vertebrate nervous systems, one probably reflecting both its evolutionary history and development (Rakic, 1988). The CNS has enlarged dramatically since vertebrate brains first evolved, and replication of existing modules, subject to subsequent phylogenetic and ontogenetic modification, represents a common and convenient mechanism for expansion and elaboration in biological systems. Columns in the neocortex (Mountcastle, 1978), parasagittal strips in the cerebellar cortex (Oscarsson, 1980; Voogd and Bigare, 1980), and striosomes of the striatum (Graybiel, 1991) epitomize some of the many forms modularity assumes in the mammalian CNS. To that list one might add the barrels, blobs, bands, islands, pools, clusters, and aggregates of many kinds scattered throughout the vertebrate brain. Neurobiologists typically consider modular organization in the context of local circuits and circumscribed brain regions. However, principles of modularity may also apply to the organization of the neural networks that link physically separated regions of the CNS. This conjecture receives support from neuroanatomical studies that demonstrate a high degree of topographic specificity in the projection pathways linking different regions of the cerebral cortex, thalamus, basal ganglia, and cerebellum (e.g., Asanuma et al., 1983; Goldman-Rakic, 1984, 1988a,b; Ito, 1984; Alexander et al., 1986; Gibson et al., 1987; Shinoda and Kakei, 1989; Hoover and Strick, 1993). Motivated by these and other examples of anatomical specificity in projection pathways, we and others have been exploring an extension of the concept of modularity-from modules restricted to a single neuronal structure to those that may be distributed over a number of distant, but functionally cooperative, structures (Goldman-Rakic, 1988a; Selemon and Goldrnan-Rakic, 1988; Houk, 1989; Houk et al., 1990; Eisenman et al., 1991; Houk and Barto, 1992; Berthier et al., 1993; Houk and Wise, 1993; Wise and Houk, 1994). Specificity in these James c. Houk! and Steven P. Wise 2 1 Department of Physiology, Northwestern University Medical School, Chicago, Illinois 60611 and 2 Laboratory of Neurophysiology, National Institute of Mental Health, Poolesville, Maryland 20837 long-distance connections may create modules with the interesting property of being anatomically distributed while being united in some emergent function. We term such cooperatively interacting subunits distributed modules to reinforce the idea that they include disparately located neuronal structures connected through their projection neurons. The concept of distributed modules may assist understanding the cooperative function of the diverse "motor control" structures and the computational architectures that subserve adaptive action. In venturing to build on the work of many others who have considered the cooperative operations of motor control structures (e.g., Kornhiiber, 1971; Allen and Tsukahara, 1974; Arbib, 1987; Kawato et al., 1987; Selemon and Goldman-Rakic, 1988; Grossberg and Kuperstein, 1989), we have proposed certain general information processing functions for three kinds of distributed modules: (1) corticalbasal ganglionic modules linking cerebral cortex, thalamus, and basal ganglia; (2) cortical-cerebellar modules linking parts of the cortex, pons, thalamus, and cerebellum; and (3) cortical-cortical and their associated cortical-thalamic modules linking columns of cerebral cortex and thalamus through reciprocal connections (Houk and Wise, 1993; Wise and Houk, 1994). We begin our discussion by considering certain cellular specializations in each of these three types of modules. Cellular Specializations for Information Processing Neurons have impressive morphological and physiological specializations (Llinas, 1988; Shepherd, 1990), which probably reflect their distinct information processing capabilities. Although we cannot review this topic in detail, it will be important to highlight a few prominent cellular specializations as they relate to the information processing modules discussed in this article. Purkinje and Striatal Spiny CeUs The classic theoretical work on pattern classification networks (Nilsson, 1965) and perceptrons (Rosenblatt, 1962; Minsky and Papert, 1969) employed threshold logic units. These artificial neurons had (1) high convergence ratios of diverse inputs onto each output neuron, (2) specialized training signals for the efficient adjustment of the large number of weights associated with these inputs, and (3) sharp thresholds between on- and off-states of the output neurons. The latter property ensured clean "decision surfaces" for detecting the presence or absence of the input patterns to which the units were tuned. While pattern classifiers constructed from such simple threshold logic units have definite limitations (Minsky and Papert, 1969), they nevertheless demonstrate remarkable recognition capabilities. Purkinje cells in the cerebellar cortex and striatal spiny neurons in the basal ganglia have several unique structural and functional properties that appear to be analogous to threshold logic units. First, like threshold logic units, Purkinje and striatal spiny neurons have high convergence ratios. This characteristic results from their extensive dendritic trees, numerous spinous Cerebral Cortex Mar/Apr 1995;2:95-110; 1047-3211/95/$4.00 synapses, and a pattern of innervation favoring the convergence of diverse afferents onto individual neurons. Each Purkinje cell is contacted by approximately 200,000 different parallel fibers (Ito, 1984), and each spiny neuron is contacted by about 10,000 different corticostriatal afferents (Wilson, 1995). Those are the highest convergence ratios known in the nervous system. Second, Purkinje and spiny neurons receive specialized inputs that appear to transmit training information for guiding the adjustment of synaptic weights. While many types of neuron exhibit synaptic plasticity, in most cases it appears to be controlled by a Hebbian-like mechanism that depends mainly on local presynaptic-postsynaptic correlation. As discussed later, a Hebbian mechanism functions well for some types of learning, such as the unsupervised learning problems confronted by sensory systems. By itself, however, it is inadequate for training motor systems to interact with the environment in useful ways. In these cases, training information that reports on the success or failure of interactions with the environment is also required, and learning is most efficient when this information is specific. In the cerebellar cortex, climbing fibers are highly specific and appear to transmit training information resembling a punishment signal reporting on failures in movement coordination (Ito, 1984; Houk and Barto, 1992). In the basal ganglia, dopamine fibers appear to provide training information that signals predictions of reinforcement (Wickens, 1990; Ljungberg et aI., 1991, 1992; Schultz et aI., 1993; Houk et aI., 1995). This input is topographically organized (Graybiel, 1991; Gerfen, 1992); however, the specificity is probably not as pronounced as that for climbing fibers. Third, an unusually high density of voltage-dependent ion channels render the electrical responses of Purkinje and spiny neurons exceptional. In particular, persistent calcium current in Purkinje cell dendrites supports plateau potentials that have sharp thresholds for state transitions (Llinas and Sugamori, 1980; Ekerot, 1984). This nonlinear dynamical feature is thought to convert dendrites into bistable elements and the neurons as a whole into multistable input-output units (Houk et al., 1990; Yuen et aI., 1992). The discrete thresholds for plateau potentials are analogous to the sharp decision surfaces of threshold logic units. Similarly, the sharp division between "up" and "down" states exhibited by spiny neurons (Wilson, 1990) would provide sharp decision surfaces for these neurons in pattern recognition tasks. Cortical Pyramidal Cells Pyramidal neurons of the cerebral cortex also have several important specializations in morphology and physiology, ones that differ from those of Purkinje and spiny neurons. First, pyramidal neurons have combinations of ion channels that promote graded frequencies of firing in response to graded strengths of input (McCormick et aI., 1985), in contrast to the dual-state behavior characteristic of striatal spiny neurons and Purkinje cell dendrites. Processing units with graded outputs are clearly advantageous when the results of a neural computation need to be expressed over a range of magnitudes, as contrasted with the "yes" or "no" values required of threshold logic units. Second, intra-axonal staining (Gilbert and Wiesel, 1983; De Felipe et aI., 1986; Shinoda and Kakei, 1989) and other methods (e.g., Goldman and Nauta, 1977;Jones et aI., 1978; Goldman-Rakic, 1988a,b; Huntley and Jones, 1991) have shown that individual fibers from the thalamus or cortex form clusters of synapses, which suggests that individual afferents could make a variable number of synapses on a given pyramidal neuron. This would extend the range of input weights. Third, instead of specific training signals, pyramidal neurons appear to receive several diffuse inputs that may provide global mechanisms for nonspecifically modulating synaptic 96 Distributed Modules in Motor Control' Houk and Wise plasticity and learning (Bassant et aI., 1990; Waterhouse et al., 1990; Murphy et aI., 1993). At the cortical level learning appears to be guided mainly by local correlations between preand postsynaptic activity. Local learning rules are useful in unsupervised learning tasks, which can be effective in organizing sensory representations into topographic and cognitive (e.g., spatial) maps (Barlow, 1989; Reiter and Striker, 1989; Bear et al., 1990; Schlagger et aI., 1993) or in establishing automatic responses such as conditioned reflexes (Houk and Barto, 1992). For example, if a neuron already receives a strong, previously established connection (analogous to an unconditioned stimulus) capable of forcing the cell to respond in an appropriate manner, this strong input can then train other inputs by "example." In this manner, a neuron can select from a set of weak inputs those pertinent to the task at hand. Later, we suggest that this type of learning may occur in the frontal cortex where it could be guided by examplesetting, forcing inputs transmitted from the basal ganglia and cerebellum. Cortical Basal-Ganglionic Modules Context Recognition by Spiny Neurons In our model, the emergent functions of cortical-basal ganglionic modules stem from the capacity of their striatal spiny neurons for pattern recognition. In the cortical-basal ganglionic module illustrated in Figure lA, note the convergence of input from several cortical columns (C for cortical columns generally, F for a frontal column) onto a cluster of striatal spiny neurons (SP). This feature is well suited for contextual pattern recognition (Houk and Wise, 1993; Wise and Houk, 1994). We postulate that, through the mediation of reinforcement training signals provided by the dopaminergic cells of the midbrain, this neuronal architecture learns to recognize and register complex contextual patterns that are relevant to behavior. This contextual information includes the state of the organism, the desirability of an action, the actions planned in the near future, the location of targets of action, and sensory inputs suitable for either selecting or triggering motor programs. Convergence onto Striatal Spiny Cells The convergent input upon striatal spiny cells from diverse regions of the cerebral cortex is processed and fed back, via the pallidum (P) and thalamus (T), to the frontal cortex (Fig. 1A; Alexander et aI., 1986, 1990). The precise extent of cortic os triatal convergence may vary substantially. Parthasarathy et al, (1992) have reported evidence that the terminal fields of projections from the frontal eye field (FEF) and the supplementary eye field (SEF) to the striatum overlap almost exactly. Similarly, Flaharty and Graybiel (1991) have shown that parts of the somatosensory cortex and the primary motor cortex send converging inputs to striatal targets, potentially onto individual spiny cells. In contrast, Selemon and GoldmanRakic (1985) found that whereas prefrontal and posterior parietal inputs may project to the same general sector of the striatum (Yeterian and Van Hoesen, 1978), they interdigitate at the local level rather than overlap. It is possible that both interdigitation and frank overlap can be found among corticostriatal projections, and that both provide for a diversity of inputs to the striatal spiny cells that they contact. Cortical-Basal Ganglionic Modules as Context Detectors Some of the signals that cortical-basal ganglionic modules might support are illustrated in Figure lB. The present scheme is based on Chevalier and Deniau (1990). We further suggest that the spiny neuron burst illustrated in trace SP Figure 1. A, A cortical-basal ganglionic module, with an embedded cortical-thalamic module. C, cortical column composed ofcorticocortical, corticothalamic, and other projection neurons; F, a cortical column inthe frontal cortex; Sp' spiny striatal neuron; ST, subthalamic nucleus neuron; P, pallidothalamic neuron; T, thalamocortical neuron. B, Activation patterns of some of the elements in a cortical-basal ganglionic module. Traces SP, P, and T-F represent the discharge rate as a function of time for striatal spiny neurons, pallidothalamic cells, and frontal cortical-thalamic modules, respectively. For traces P and T-F, solid lines indicate signals transmitted through the direct pathway in A and stippled lines indicate signals transmitted through the ST sideloop. A context registration B SP context detected p pallidal discharge patterns _nL_"__ reflects the neuronal "recognition" of the context to which that spiny neuron is tuned. Spiny neurons inhibit pallidal neurons (cell P in Fig. lA), so their bursts are believed to produce pauses in pallidothalamic activity (solid trace P in Fig. IB) (DeLong and Georgopoulos, 1981; Tremblay and Filion, 1989; Chevalier and Deniau, 1990). Pallidothalamic cells are also inhibitory, and one would expect their pause in discharge to initiate a brief burst of thalamic discharge, due to the inhibitory rebound properties of these neurons (Wang et aI., 1991). This rebound burst might then initiate positive feedback in the reciprocal cortical-thalamic loop shown in Figure lA (Houk and Wise, 1993), assuming that the corticothalamic projection has a net excitatory influence (Ghosh et aI., 1994). Once initiated, positive feedback could be self-sustaining and thus could continue after pallidal discharge resumed its tonic rate. Sustained cortical-thalamic loop feedback (solid trace TF in Fig. IB) would register that a relevant context recently occurred, thus serving as a working memory (Fuster and Alexander, 1973; Goldman-Rakic and Friedman, 1991) of the contextual information encoded by the striatal spiny neuron. This model bears important similarities to Hikosaka's (1989) views on dynamic interactions in the eye-movement control system. Strictly cortical mechanisms, in addition to thalamic disinhibition, undoubtedly contribute to the regulation of loop activity. For example, cortical inputs could initiate and/or help sustain positive feedback in the cortical-thalamic modules. Consistent with this idea, cortical rather than pallidal afferents Cerebral Cortex Mar/Apr 1995, V 5 N 2 97 have been implicated as causal factors in the premovement activation of thalamic neurons that receive both inputs (Anderson and Turner, 1991). The pallidothalamic segment of a cortical-basal ganglionic module would, on this view, be ideally situated to modulate discharge in cortical-thalamic modules (Chevalier and Deniau, 1990), and would do so on the basis of contexts recognized by the striatal spiny cells. Some behavioral neurophysiology of the basal ganglia appears to support the proposal that it plays a role in context recognition and registration. Nearly all of the investigators who have studied striatal or pallidal modulation in awake, behaving monkeys have emphasized its context dependency (Alexander, 1987; Hikosaka et al., 1989b; Alexander and Crutcher, 1990; Schultz and Romo, 1992). Context-dependent neuronal activity, in this sense, indicates discharge modulations that do not obligatorily follow sensory events or accompany specific motor acts, but rather do so only under certain circumstances. Context-dependent striatal modulation both follows sensory signals and accompanies movements (Rolls et al., 1983; Schultz and Romo, 1988, 1992; Hikosaka et al., 1989a; Romo and Schultz, 1992). Kimura (1992, p 212) concluded that "most of the sensory responsive putamen neurons [81 %] showed clear differences in the responses to identical stimuli ... presented with [in] different behavioral contextjs},' This finding includes the majority of spiny cells in the putamen (Kimura et al., 1990; see also Kimura, 1992), as well as the tonically active cells that are likely interneurons (Kimura et al., 1984; Apicella et al., 1991). Interestingly, this poststimulus activity does not depend dramatically on movement parameters, including the direction of movement. In contrast to this apparently sensory activity, which follows stimuli, many striatal modulations precede movements. This "movement-related" activity may reflect movement parameters (DeLong and Georgopoulos, 1981), but it also depends upon the context in which an action occurs (Kimura, 1990; Gardiner and Nelson, 1992). Again quoting Kimura (1990, p 1295), a fundamental "characteristic of ... movement-related cell activity [is] dependence on the conditions in which movement occurs. . . ." Brotchie et al. (1991) stress a similar opinion concerning the pallidal cells that receive striatal input. Context dependency in striatal and pallidal activity accords with the idea that striatal spiny neurons act as pattern detectors. Context Recognition and Mutual Inhibition Our notion of context recognition resembles Shallice's (1988) ideas concerning "contention scheduling." In that scheme, neuronal assemblies, activated by a pattern of sensory and other inputs, form mutually inhibitory networks that constitute a "winner-take-all" system. The module most activated will influence the action with which it is associated. Frith (1992) has previously suggested the basal ganglia as the site of contention scheduling. This hypothesis accords well with the elaborate system of spiny neuron GABAergic collaterals (Wilson and Groves, 1980; Groves, 1983; Aronin et al., 1986; Kawaguchi et al., 1990) postulated to form competitive networks within inhibitory domains (Alexander and Wickens, 1993). Feedforward inhibition through local GABAergic interneurons might also contribute to these operations (pennartz and Kitai, 1991). Through these inhibitory mechanisms, one can anticipate a high degree of mutual exclusion among cortical-basal ganglionic modules, which would result in a sparse coding of salient context. Thus, any given context would tend to be recognized by a relatively small number of modules, although they might share many inputs. This concept has some important consequences when combined with the knowledge that different populations of striatal neurons may originate the "direct" and "indirect" pathways (Gerfen et al., 1990; Gerfen, 98 Distributed Modules in Motor Control' Houk and Wise 1992; Flaharty and Graybiel, 1993). The direct pathways inhibit the pallidothalamic output cell P in Figure lA, whereas the indirect pathway relays inhibitory inputs from SP neurons to a part of the globus pallidus (not shown) that in turn inhibits the excitatory ST input to P neurons (see Hazrati and Parent, 1992). The net effect is thus disinhibitory, as indicated by the open arrow in Figure lA. In our scheme, spiny neurons of the direct pathway can be tuned to contexts for action, whereas nearby spiny neurons associated with the indirect pathway would respond to contexts for withholding action. As shown by the stippled traces in Figure IB, activity in the indirect pathway would enhance P discharge, rather than suppressing it, which could counteract context registration promoted by a direct pathway or, as illustrated in Figure IB, could negate a previously registered context. In accord with this idea, some of the putamen neurons appear to be more associated with the withholding, rather than the execution, of movements (Hikosaka and Wurtz, 1983: Schultz and Romo, 1992). Function and Dysfunction of Cortical-Basal Ganglionic Modules Our suggestion that striatal spiny neurons function in context recognition appears to contrast with prevailing theories about the role of the basal ganglia in motor control. Traditionally, the basal ganglia have been thought of as modulators of movement that release motor responses through a disinhibitory mechanism (Marsden, 1982; Hikosaka and Wurtz, 1983; Albin et al., 1989; DeLong, 1990). By contrast, it has been proposed that the role of the basal ganglia involves preventing maintained motor activities, including normal posture (Mink and Thach, 1991), from interfering with shifts in limb position. The dual pathways for enabling and withholding movements, the direct and indirect pathways mentioned above, may help to reconcile these apparently contradictory views. Since context is clearly important in determining whether to enable or suppress an action, both of these functions would fit well with the idea of context detection promoted here. Thus, suppression of postures (Mink and Thach, 1991) can be viewed as a function of recognizing a context for withholding a rigid postural command and conveying that recognition to the thalamus. Although we recognize the speculative nature of the assignment of a context recognition role to the basal ganglia, that idea accords with current models of its pathophysiology (Hallett, 1993). Ablating or inactivating the globus pallidus does not lead to paralysis. Movements can still be selected and executed in an appropriate context (Horak and Anderson, 1984; Mink and Thach, 1991). Not only can the motor system still select the correct action, but it does so without a dramatic increase in reaction time. This fact appears to contradict the view that the basal ganglia serve as context recognizers for action. If the system cannot recognize the context for action, one might ask, how can it act at all? However, these findings are not surprising if one views the pallidal output as playing a modulatory or gating role (Bullock and Grossberg, 1988), biasing the motor system toward greater or lesser activation based on the prevailing context. This idea is consistent with the hypothesis that bradykinesia in Parkinson's disease reflects scaling deficiencies (Hallett and Khoshbin, 1980; Berardelli et al., 1986; Hallett, 1993). Normally, the recognition of a context for action would permit continuation of that action and, possibly, its amplification. In Parkinson's disease, a failure to recognize an appropriate context would lead to the relative suppression of ongoing action. Also of interest are two alternative kinds of failures of striatal context recognition: failure to detect a context that should suppress action or falsely signaling a context for action when one has not occurred. Such failures should lead to behavior occurring outside of an appropriate context, and it has been noted that basal ganglia dysfunction could lead to a wide variety of such behavior (Hallett, 1993), including the tics of Tourrette's syndrome (Petersen et aI., 1993; Singer et aI., 1993), involuntary movements such as ballismus and chorea (Page et aI., 1993), derangement of volitional movement (athetosis), and the repetitive, uncontrollable thoughts or actions that characterize obsessive-compulsive disorder (Wise and Rapoport, 1988). In considering basal ganglia function and dysfunction, it is also helpful to distinguish between the gating of immediate movements, as implied in most of the above examples, and the planning of future actions. A planning function for the cortical-basal ganglionic module is inherent in our suggestion that cortical-thalamic loops retain information about which contexts have been recognized by striatal spiny neurons. From a different perspective, there has been a recent emphasis on cognitive functions of the basal ganglia, focusing on a concept related to planning termed attentional set. Several studies of cognitive deficits in Parkinson's disease have stressed these patients' difficulty in shifting set (e.g., Flowers and Robertson, 1985; Brown and Marsden, 1988; Owen et aI., 1993; see also Passingham, 1993). While it is known that there is substantial dopamine input to neocortex in primates, it remains plausible to assume that deficits in Parkinson's disease reflect striatal dysfunction. On that assumption, the Parkinsonian's difficulty in shifting set, or planning, is also consistent with the idea that context detection is a fundamental striatal function. Failure to detect a context for implementing a plan would be analogous with failure to detect a context for action. Perhaps the descending pathways of the basal ganglia are primarily involved in gating functions, whereas the ascending pathways to the frontal cortex, especially those to the prefrontal areas, are more important in planning on the basis of recognized context. Cortical-Cerebellar Modules Recognition ofAction Goals by Purkinje Cells The emergent functions in our model of cortical-cerebellar modules (Fig. 2A) derive from an ability of Purkinje (and basket) cells to recognize patterns that lead to the selection and execution of actions (Berthier et aI., 1993) and from the propensity of positive feedback between the motor cortex and cerebellum to serve as a driving force for generating movement commands (Houk et aI., 1993). As discussed in the previous section, Purkinje neurons have cellular properties that make them ideal pattern classifiers. We posit that climbing fibers train Purkinje cells to recognize complex input patterns that signify when the goal of an action is about to be achieved. Purkinje cell firing then inhibits cortical-cerebellar loop activity, terminating the movement command to achieve an accurate movement. Convergence onto Purkinje and Basket Cells As with the cortical-basal ganglionic modules, the convergence of diverse inputs is important in the operation of cortica1-cerebellar modules. In this case, parallel fiber (PF) afferents, shown in Figure 2A, converge with ratios up to 200,000: 1 onto Purkinje cells (PCs) and with lesser ratios onto basket cells (BCs). Parallel fibers arise from granule cells, which receive mossy-fiber inputs from a variety of sources (not shown). One source, the corticopontocerebellar projections, is similar to the corticostriatal projections in that they originate from much of the cerebral cortex (Brodal, 1987; Stein and Glickstein, 1992). Cortical columns originating these fibers are labeled "C" in Figure 2A, except for the motor col- umn (M). As with the corticostriatal system, there is substantial convergence from these corticopontine inputs. Also like the corticostriatal system, a certain degree of segregation of inputs can also be found (Bjaalie and Brodal, 1989), and various combinations of frank overlap and interdigitation probably exist. Cortical-Cerebellar Modules as Selectors and Executors of Action The core of the cortical-cerebellar module is a recurrent loop through the frontal cortex (Houk, 1989: Houk et aI., 1993). This loop courses from one of the divisions of motor cortex (M in Fig. 2A), via the pons (not shown), to cerebellar nucleus (N) as a mossy fiber collateral (Shinoda et aI., 1992), and returns to motor cortex though the thalamic (T) link of a cortical-thalamic module. We envision that the cortical-cerebellar network is actually composed of many positive-feedback loops (Houk et aI., 1993), and when regenerative activity is distributed throughout the network, this instantiates the motor act. Regenerative activity can be triggered by excitatory inputs to any component or combination of components of the feedback loops. The modules effect their control of limb movement through the corticospinal and rubrospinal pathways. While superficially similar, the feedback loops involving the cortical-cerebellar and cortical-basal ganglionic modules differ in important ways. Cortical-cerebellar loops involve predominantly excitatory transmission at each stage in the loop, which should function well in transmitting graded signals to command graded actions. The disinhibitory loops inherent in the cortical-basal ganglionic modules may, instead, function in a bistable manner and be better suited for transmitting discrete pattern-recognition signals. In cortical-basal ganglionic modules, the pattern-recognizing elements are embedded in the main recurrent loop. In contrast, the parts of the corticalcerebellar module that operate as pattern recognizers, Purkinje and basket cells, are in a separate loop of the module. Since Purkinje cells inhibit nuclear cells (Fig. 2A), Purkinje cell discharge serves to regulate the main loop's activity. Following the work of Marr (1969) and Albus (1971), Houk and Barto (1992) postulated that the special neuronal architecture of the cerebellar cortex is used to recognize complex states that are critical for the selection and control of actions, as well as for translation of this state information into spatiotemporal patterns of motor discharge appropriate for commanding precise movements. Information about the state of the organism and its environment is conveyed to Purkinje and basket cells by parallel fibers. The parallel fiber system, in turn, receives its information from ascending sensory, reticulocerebellar, and corticopontocerebellar pathways through their mossy fiber inputs. The Purkinje and basket cells learn how to respond to these inputs as a result of training signals in climbing fibers that emanate from the inferior olivary complex. The view that climbing fibers act as detectors of discoordination stems from an analysis of the physiological properties of olivary neurons (Houk and Barto, 1992; also see Kawato and Gomi, 1992). In our model, climbing fibers train cortical-cerebellar modules to move the limb from a starting position to a selected target or endpoint in space, the latter comprising the goal that Purkinje cells have learned to recognize. Since the modules are intrinsically capable of generating motor patterns that command straight trajectories from an arbitrary starting position to a selected goal (Berthier et aI., 1993), there is no fundamental requirement for the higher stage of trajectory formation that is assumed in most alternative models of limb control (e.g., Kawato et aI., 1987; Miall et aI., 1993). However, our model does require the assistance Cerebral Cortex Mar/Apr 1995. V 5 N 2 99 Figure 2. A, A cortical-cerebellar module, with an embedded cortical·thalamic module, in the format of Figure lA. C, cortical column; M, motor cortical column; T, thalamocortical neuron; N, deep cerebellar nuclear neuron; BC, basket cell; PC, Purkinje cell; PFs, parallel fibers. B, Activation patterns of some ofthe slements in a cortical-cerebellar module, inthe format ofFigure 1B. Traces BC, PC, and N·T·M represent signals in basket cells, Purkinje cells, and cortical-cerebellar loops, respectively. For traces PC and N- T-M, the solid lines illustrate modules that are disinhibited by basket cell firing, thus supporting an action command. In contrast, thestippled lines illustrate modules with suppressed command output due to strong Purkinje cell activity. A action command C PFs B BC n selection signal : PC programming and terminating action I N-T-M if' instruction of reprogramming signals from a higher neural stage (presumably the premotor cortex) whenever an indirect trajectory to a target is desired, as, for example, when the movement has to avoid an obstacle. These properties accord with the finding that premotor lesions that spare primary motor cortex do not 100 Distributed Modules in Motor Control> Houk and Wise action command ;\, .. : \ J \ if' trigger interfere with ordinary reaching, while rendering an animal incapable of moving its limb around an obstacle to grasp an object (Moll and Kuypers, 1977). Figure 2B shows how signals for controlling a direct trajectory might be generated in a cortical-cerebellar module. Although scant evidence exists for the activity patterns of some elements, such as the basket cells, we are postulating that a population of basket cells is tuned to respond (trace BC in Fig. 2B) to a pattern of input states that determine, along with parallel fiber inputs, which Purkinje cells will be inhibited (solid trace PC) or excited (stippled trace) prior to the start of a movement. The change in Purkinje cell state caused by the selection signal from the basket cells and parallel fibers constitutes the programming of an action in our scheme. The bistability of Purkinje dendrites could function as a temporary memory of this selection, spanning the time interval shown in Figure 2B between an instruction cue that selects a motor program and a trigger cue that initiates loop activity comprising the action command (trace N-T-M). Note that if each of the major dendrites of a Purkinje cell were bistable, the cell as a whole could express multiple stable firing rates, thus incorporating both increases and decreases in discharge as illustrated by trace PC in Figure 2B. According to our model, Purkinje cells active at the beginning of the action command will inhibit the cortical-cerebellar loops at selected sites in the cerebellar nuclei, thus determining the precise spatiotemporal motor pattern established in the cortical-cerebellar network. Since several hundred Purkinje cells converge upon each nuclear cell, if relatively few of the Purkinje cells discharge at the beginning of movement, a relatively large signal can emanate from the associated loop, which presumably leads to a larger and/or faster movement. Consistent with this prediction, the discharge of task-related cerebellar nuclear cells correlates with the velocity and duration of the movement (van Kan et aI., 1993a). PCs show both increases and decreases in discharge in association with movement (Mano and Yamamoto, 1980; Chapman et aI., 1986; Dugas and Smith, 1992; Stein and Glickstein, 1992; Thach et aI., 1992; Fortier et aI., 1993). The decreases could permit the buildup of positive feedback in modules that innervate agonist muscles, whereas the increases could suppress the activity of modules that innervate antagonists (cf. Houk et al., 1993). It is important to note that, in this scheme, the programmed action is not initiated by the programming process; instead, it is initiated by separate triggering signals. Sensory and cortical-cortical inputs to the cortical-cerebellar loop at any point can trigger positive feedback (Fig. 2A), thus initiating the action command. If the triggering process were suppressed, one could have programming activity in the cerebellar cortex without any execution of movement, in agreement with the finding that local blood flow in the cerebellum is enhanced when a subject imagines a movement sequence, without actually performing it (Decety et aI., 1990). Assuming that the triggering process does occur, as the movement proceeds the Purkinje cells that turned off during selection would recognize that the desired action is nearly completed, whereupon they would resume their stable "on" state and inhibit positive feedback in the cortical-cerebellar module. This is considered to be a predictive type of control that can compensate for the time delays between a central command and the resultant action. Miall et al. (1993) proposed that the cerebellum accomplishes predictive compensation by forming detailed models of the controlled system and combining these models in a specialized manner to generate the output command. By contrast, we suggested a scheme in which Purkinje cells simply combine signals representing limb and target position, velocity, force, and efference copy signals to determine when to switch to their "on" state, thus terminating the motor command (van Kan et al., 1993b). Purkinje cells would learn to recognize input patterns that occur at a significant phase advance so as to predict goal acquisition rather than depending on delayed feedback confirming that a goal has actually been achieved. Cell Activity in Different Components of the Module The proposed model provides an explanation for the substantial differences that have been observed between movementrelated signals that enter and leave the cerebellum (Houk and Gibson, 1987; Houk et aI., 1990; van Kan et aI., 1993b). The most striking differences between inputs recorded from mossy fibers and outputs recorded from either Purkinje or nuclear cells concern sensory responsiveness and sensitivity to position versus velocity of a movement. Many mossy fibers are highly responsive to sensory stimulation and show prominent tonic sensitivity to limb position; they may also show sensitivity to velocity (van Kan et aI., 1993b). In contrast, the outputs recorded from Purkinje (Harvey et aI., 1977) and nuclear (Harvey et aI., 1979; van Kan et aI., 1993a) cells show either no response or a weak, phasic response to natural sensory stimulation, whereas they show intense movement-related bursts that correlate with velocity. These data document striking sensory-to-motor and position-to-velocity transformations that occur within the cerebellar cortex. The observed transformations are well accounted for by the proposed model of cortical-cerebellar modules. According to the model, sensory signals related to limb position would inform Purkinje cells about the progress of ongoing movements and would contribute importantly to the constellation of inputs these cells might use to recognize when the limb is near the goal of an action. The Purkinje cells would then switch to an intense firing mode, which would terminate the movement command in advance of the desired endpoint of the movement. The bistable dendritic properties discussed earlier lead to the prediction that Purkinje (and, therefore, nuclear) cells would be relatively insensitive to sensory inputs from their parallel fibers under most circumstances. Only when the cell neared the point of state transition would inputs appear to be effective. This aspect of the model explains the sensory-to-motor transformation of the cerebellar cortex. As noted earlier, the present model generates the phasic, velocity-related aspect of the output signals by shutting down the cortical-cerebellar loop activity that was originally triggered to initiate the movement command (Fig. 2B). This feature of the model accounts for the position-to-velocity transformation of the cerebellar cortex. In contrast to the differences predicted between cerebellar cortical inputs and outputs, the model predicts that the activity of cells in the deep cerebellar nuclei should resemble signals recorded in the primary motor cortex and at other stages throughout the limb premotor network, at least to a first approximation (Houk et aI., 1993). Some early reports suggested that activity in the deep cerebellar nuclei leads that in the primary motor cortex (see Thach et aI., 1992). However, Fortier et al. (1993, p 1143) have recently undertaken a detailed comparison of cerebellar and motor cortical activity during reaching movements. They reported no dramatic timing difference between cerebellar and motor cortical premovement activity and that, notwithstanding some important contrasts in detail, "the mean directional tuning curves of the cerebellar and motor cortical populations suggest strong similarities among the general behavior of these two motor control regions." The overall similarity of activity patterns, timing, and other properties confirms the predictions of the present model. The differences between cerebellar and neocortical activity might also be instructive. Motor cortical neurons tended to show more inhibition of activity during nonpreferred directions of limb movement, were more narrowly tuned for direction, and showed less variability than cerebellar neurons. There were more nondirectional cerebellar cells and they Cerebral Cortex Mar/Apr 1995, V 5 N 2 101 showed a higher spontaneous firing rate than primary motor cortical neurons. In sum, it appears that the cerebellar component of the loop is more likely to be actively discharging than its cortical limb, at least for forearm-movement tasks, but does so in a manner less consistently correlated with motor behavior. This property, which might result from a lack of inhibitory interneurons in the cerebellar nucleus, could bias the cortical-cerebellar loop toward its threshold for sustaining activity. Function and Dysfunction of Cortical-Cerebellar Modules In the present model, Purkinje cells act as adaptive pattern classifiers, and failures in their function will have predictable consequences for motor control. Excessively restrictive or permissive classifications will lead to errors in movement amplitude and direction. Coordination can be thought to result from the proper control of Purkinje cells throughout the relevant parts of the cerebellar cortex and the timing of that control during the evolution of ongoing movements and movement sequences. This model is consistent with the effects of cerebellar disease, which are characterized by errors of starting, stopping, and directing action, as well as control of acceleration, velocity, force, and the synthesis of complex synergies (Holmes, 1939; Stein and Glickstein, 1992; Thach et aI., 1992). The cerebellum has been traditionally viewed as a structure of coordination and, more recently, of motor learning (Ito, 1984: Thompson, 1986). Certainly, many structures participate in coordination and motor learning, as postulated for models of the vestibulo-ocular reflex (Ito, 1984; Lisberger, 1988; Peterson et aI., 1991) and saccadic eye movements (Dominey and Arbib, 1992; Houk et aI., 1992). But, as Thach et al. (1992, p 436) have concluded, "what is unique about cerebellar learning is the flexibility, ease, and speed of assigning the trigger-response ... and of building the tailor-made complex movement response." The architecture described in this section, positing Purkinje cell control of distributed cortical-cerebellar loop discharge, shows one simple mechanism for achieving those attributes. Input to any part of the loop from any modality, source, or level of the neuraxis can trigger the same motor program. Various combinations of these loops, regulated to a particular spatiotemporal pattern through the mediation of inputs to the cerebellar cortex, can sculpt the choice of components into a coherent, coordinated act of unending complexity and flexibility. Cortical-Cortical and Cortical-Thalamic Modules Collective Computations with Pyramidal CeUs In an earlier section we suggested that cortical pyramidal cells may be specialized for graded input/output relations, which would make them well suited to the performance of collective computations (Tank and Hopfield, 1987). Collective computations involve weighting and combining several input factors to generate an output that reflects the aggregate properties of these inputs. As opposed to the pattern classification problems faced by Purkmje and striatal neurons, the myriad of inputs to pyramidal cells would have to be added and subtracted to form a graded resultant that reflects many factors over a wide, dynamic range, rather than calling for sharp decision surfaces. Not only are neurons with graded input/output properties of value in collective computations; their organization into highly interconnected, recurrent networks represents an important element in their computational capabilities. A long history of connectionist literature (Kohonen, 1972; Anderson et aI., 1977; Grossberg, 1980; Hopfield, 1982, 1984; Rummel- 102 Distributed Modules in Motor Control' Houk and Wise hart et aI., 1987) has shown that highly interconnected, recurrent networks are an excellent architecture for associative memories, perceptual operations, and the solution of optimization problems. The ability to respond to graded inputs allows many individual factors to be appropriately weighted; the presence of many neurons takes advantage of the speed of parallel computation; and the availability of many loops of interconnection facilitates recursive readjustments of multiple factors. These features in combination yield networks ideally suited to automatic collective computations. Nodal Points and Attractors. Inputs converge upon a cortical column from several different cortical areas (cortical-cortical modules), from other columns of the same cortical fields, and from several thalamic nuclei (cortical-thalamic modules) (Jones et aI., 1978; Jones, 1985; Goldman-Rakic, 1988a; Huntley and Jones, 1991). Cortical columns connecting with each other form cortical-cortical modules and the same columns connecting with restricted zones in the thalamus form cortical-thalamic modules. Although cortical cells projecting to other cortical columns and those reciprocating inputs to thalamus reside in different layers, for the most part they are highly interconnected and receive many common inputs. The cortical column can be thought of, then, as a nodal point that combines the several types of influence represented by its diverse sources of cortical and thalamic input (Goldman-Rakic, 1988a,b). As indicated in Figures 1 and 2, nearly all of the connections that converge upon a particular nodal point in the cerebral cortex are reciprocated by return projections, although laminar organization and quantitative aspects of these recriprocal connections may differ (Goldman-Rakic, 1988a; Felleman and Van Essen, 1991). Reciprocity combines with the nodal architecture to form a complex cortical and thalamic network that comprises numerous feedback loops and alternative paths for information flow. Networks of this type have interesting nonlinear dynamical properties that may include limit cycles, chaotic trajectories, and discrete equilibrium states called point attractors (Freeman, 1979; Hopfield, 1982). The focus here will be on point attractors, which are points in state space' where state variables remain constant rather than varying as a function of time. Attractors can be thought of as valleys, or minima, in a landscape created by an "energy" function (Hopfield, 1982). If the state of the network is transiently displaced away from an attractor, energy is elevated, and the state variables (the activations or discharge rates of neruons) will begin to change with time, either increasing or decreasing. Their variations will be along a trajectory that gradually moves the state to a lower energy level, that is, toward an attractor. The network can settle back to either the same attractor, or to another one, as long as it follows a downhill trajectory on the energy landscape. Connectionist research has demonstrated that the particular values assumed by the state variables at attractor points can be used to represent solutions to important information processing problems in cognitive psychology (Rummelhart et aI., 1987; Tank and Hopfield, 1987: Hinton and Shallice, 1991). The feedback loops discussed earlier for cortical-cerebellar modules can serve to illustrate the general idea of network attractors. These recurrent loops are characterized by two types of point attractor (Eisenman et aI., 1991). A quiescent type would serve to keep the network in a relatively inactive state, corresponding to a resting period before a motor command is generated. In contrast, an active type of attractor would maintain the network in a state of intense activity, corresponding to the population discharge that comprises a motor command. While the animal rests, network state might vary somewhat but remain within the basin of attraction of the quiescent attractor, A sufficiently strong sensory input sensory input motor output Figure 3. The cerebral cortex is represented as an idealized, two-dimensional sheet. Nodal points may have high Iwhite and light stipple versus low black and heavy stipplel activity during a sensorimotor event. Neither laminar organization nor temporal variation is reflected inthis figure. would push the network state out of the quiescent basin and into the basin of the active attractor. This would amount to triggering the action, as outlined above. The position of the active attractor in state space would be controlled by the pattern of Purkinje cell discharge impinging on the corticalcerebellar loops. Particularly important would be the silencing of Purkinje cells at selective nodes in the network to permit the buildup of the intense discharge needed to command a movement in a particular direction. A transition back into the quiescent basin would result from the resumption of firing in these Purkinje cells, promoted by the parallel fiber inputs that occur as the goal of the movement is being approached. To return to cortical-cortical modules, Figure 3 shematizes active cortical nodal points (lighter areas) as viewed from the surface of a flattened cortical map, and one can imagine the reciprocating thalamic neurons underlying each of these nodes. This diagram should be viewed not as a snapshot at a particular point in time, but as a time exposure with the "shutter" open throughout the duration of an entire sensorimotor response. It is also important to emphasize that the activity map is quite different from the energy landscape that directs the movements of trajectories in state space, although the two are related. The activity map conforms well to a three-dimensional representation, with two dimensions devoted to the idealized, flattened cortical surface, whereas network state space will have a much higher dimensionality (see note 1). The sensory input on the left in Figure 3 is assumed to activate an initial site on the cortex. This activity then spreads to other areas, eventually activating the motor cortex so as to trigger recurrent activity in cortical-cerebellar loops, as discussed in the previous paragraph. A connectionist inter- pretation of this spread of activity from sensory to motor areas might relate it to a trajectory Winding downhill through the energy landscape characterizing n-dimensional state space, ultimately moving the activity of the network to an attractor that signifies a particular spatial pattern of motor cortical activation. Cerebral Cortex as a Repository of State Information. In addition to serving as an attractor network for collective computations, the cerebral cortex also serves as a repository for much useful information about the state of the environment and the organism, that is, external and internal conditions. The activities of neurons in columns throughout a given area of the cortex typically have response properties that are similar in some generic sense, whereas one or several parametric features of the responses differ among the individual columns. In this manner, an array of cortical columns, as a whole, forms a distributed representation of some internal state of the organism or an external state of the world. Examples of such representations include those of movement direction in the motor cortex (Georgopoulos et al., 1993), visual image motion in the visual cortex (Gilbert and Wiesel, 1981), and space in the parietal and prefrontal cortex (Zipser and Anderson, 1988; Funahashi et al., 1989). Coordination of Multiple Modules in Controlling Behavior In the section on cortical-basal ganglionic modules, we advanced the hypothesis that they might function as detectors of specific contexts, providing information that could be useful in the planning and gating of action. Then, in the section on cortical-cerebellar modules, we discussed how they might function in the programming, execution and termination of actions. Finally, in the section immediately above, we indicated Cerebral Cortex Mar/Apr 1995, V 5 N 2 103 sensory inputs action command context registration BASAL GANGLIA CEREBELLUM Figure 4. Combined schema ofacortical-basal ganglionic and a cortical-cerebellar module to illustrate how activities inmultiple modules could be coordinated (see text). Abbreviations are as in Figures lA and 2A. how cortical-cortical modules might implement collective computations while also serving as a repository for diverse distributed representations. While it is clear that each of these operations might contribute usefully to the control of action, an important problem concerns how different modules can function cooperatively. In this section, we posit two levels of coordination among modules: one within arrays of similar modules, the other among different kinds of modular arrays. Coordination within Arrays At the most elementary level of modular organization, we envision arrays of similar modules that must function in a coordinated manner to control the population activity in each cortical area. We do not illustrate a modular array, but they can be readily imagined as n replications of Figure ZA for the cortical-cerebellar class of modules and n repetitions of Figure lA for the cortical-basal ganglionic modules. The clear need for coordination within these arrays can be appreciated from the well-known coding of single-unit activity in the motor cortex (Georgopoulos et al., 1993). Cortical neurons are broadly tuned to movement direction, and a population of neurons with different optimal tuning directions needs to be recruited and coordinated to command a particular limb movement. Simulations have shown (Berthier et al., 1993) that an array of cortical-cerebellar modules can learn to function in a coordinated manner under the training influence of simulated climbing fiber inputs to the cerebellar cortex. The information source for coordination in this particular model is feedback from the environment and other types of input transmitted via the mossy fiber-parallel fiber input to Purkinje cells, as envisioned by Thach et al. (1992). 104 Distributed Modules in Motor Control' Houk and Wise Coordination between individual modules may also result from divergent anatomical connections among functionally related loops (Houk et aI., 1993), which could promote the recruitment of functionally related modules near the beginning of movement and the simultaneous cessation of discharge at its end. Thus, coordination within arrays of corticalcerebellar modules may stem from either the adaptive use of common inputs, interconnections between functionally related modules, or both. Coordination within arrays of corticalbasal ganglionic, cortical-thalamic, and cortical-cortical modules is probably achieved through the application of similar principles. Coordination among Arrays At a higher level of organization, the motor system needs mechanisms for coordinating the functions of different modular arrays. Three general types of anatomical projections may promote communication and coordination among arrays: (I) corticostriatal, (2) corticopontocerebellar, and (3) corticocortical projections. Figure 4 illustrates examples of these types of communication between one cortical-basal ganglionic module, one cortical-cerebellar module, and a group of cortical-cortical and cortical-thalamic modules. If one imagines each of these modules being replaced by an array of n similar modules, the same diagram can be used to contemplate communication among modular arrays. Figure 4 was constructed by joining Figures lA and ZA, using as tether points common connections with cortical columns. We assumed that the rightmost cortical column in the cortical-basal ganglionic module of Figure lA is the same as the leftmost column in the cortical-cerebellar module of Fig- Cerebral Cortex (collective computation) (information arrays) Basal Ganglia (context encoders) ;;7~~((]bB\~ ~ dopamine fibers (reinforcement) motor commands m((]![j]ILl~B\~((]W'~ %!! climbing fibers (discoordination) Cerebellum (pattern generators) sens ory stat es Figure 5. Overview diagram showing global interrelations in a system based on a distributed modular architecture. The cerebral cortex performs collective computations that automate planning and acting, while also serving as a repository of information arrays used by the basal ganglia and cerebellum. The basal ganglia use this information to encode new contexts that are fed back into frontal cortical arrays, a process that is guided byreinforcement inputs transmitted in dopamine fibers. The cerebellum uses similar information to select and generate motor patterns, a process guided bydiscoordination signals transmitted in climbing fibers. These motor patterns are fed back to motor cortical arrays, and corticospinal fibers transmit them to the spinal cord as motor commands. Global modulators may help to coordinate the activities of these different parts of the brain through generalized reinforcement. ure ZA, and is the middle column depicted in Figure 4. This illustrates the fact that many cortical columns originate both corticostriatal and corticopontocerebellar projections, although they originate from different neurons within the column (Mercier et aI., 1990). The differential laminar organization of corticostriatal versus corticopontine cells suggests that, to an extent, a cortical column could send differing signals to each, but the overall columnar organization of the cortex predicts that these signals should have much in common. The common cortical column mentioned earlier is depicted as receiving sensory information (via the thalamus), which may be useful both in the detection of a critical context and in the execution of a particular action. Hence, we illustrate that column as feeding information into both the basal ganglia and the cerebellum. Similarly, we assumed that the leftmost cortical column in the cortical-basal ganglionic module projects additionally to the cerebellum by way of the pons. As the output of that cortical-basal ganglionic module, this leftmost column registers the fact that the context to which the module is tuned just occurred. This information can be used by the cortical-cerebellar modules, thus assisting in the programming and execution of an appropriate action based on a recognized context. The third type of anatomical connectivity available for coordination is corticocortical, and, since these projections are generally reciprocal, they form the cortical-cortical information processing modules discussed above. The rapid, automatic communication provided by cortical-cortical modules provides an efficient mechanism for sharing related information, reorganizing it, and promoting coordination among arrays of distributed modules. Operating Principles Note that each of the processes controlled by individual modular arrays may occur asynchronously and in parallel. For example, context information may be available for selecting an appropriate action before it is initiated, or alternatively, a default action can be initiated and the selection process can function later to redirect the commanded action as it evolves (Houk et aI., 1993). This would accommodate the independent actions observed for "where" and "when" systems in eye-limb coordination (Gielen and van Gisbergen, 1990) as well as the asynchronous interactions observed between limb movement initiation and its programming (Ghez et aI., 1990). Figure 5 summarizes the global interrelations in a system based on the distributed modular architecture discussed in this article. Because the cerebral cortex is interposed between the basal ganglia and cerebellum, one of its functions will be to serve as a switchboard for information flow between these two subcortical structures. Considering the large number of functionally distinct cortical areas, each comprising an array of cortical columns, one can think of the cerebral cortex as an expansive repository for a diverse set of information arrays. Some of these arrays are trained by local learning rules to represent coarse coding of relatively unmodified sensory information, whereas another group may form more complex feature maps based on a reorganization of primary sensory information (Barlow, 1989). Yet others are controlled in more complex ways by input from the cerebellum and basal ganglia, via their thalamic relays. The cerebral cortex continuously uses its diverse information arrays to perform its collective computations, while simultaneously sharing these data with the basal ganglia and cerebellum. As illustrated in Figure 5, the basal ganglia function as detectors and encoders of salient contexts. Striatal spiny neurons are trained by their dopamine reinforcement input to recognize contexts and states that are likely to be useful in guiding behavior. The inputs for these computations come from nearly the entire cerebral cortex, and the processed outputs return to the frontal cortex. These signals invest cortical arrays with planning information that can then be used by other modules. The cerebellum functions as a generator of spatiotemporal patterns. To do this, Purkinje and basket cells, under the training influence of climbing fibers that detect discoordination, learn to select appropriate actions and to recognize the endpoints (or goals) of the actions. In addition to commanding actions, information about intention may be sent from cerebellum to motor cortical arrays, whereupon it becomes available for use by other information processing modules. We envision that much of the learning that goes on in this distributed modular network may be module specific, due to the topographic specificity of climbing and dopamine fiber input to the cerebellum and basal ganglia, respectively. While the specificity of dopaminergic inputs to striatum (Graybiel, 1991; Gerfen, 1992) may not be quite as pronounced as that of climbing fibers to cerebellum, both inputs are clearly topographically organized. Learning in the cortical network appears instead to depend mainly on a local Hebbian learning rule, although global modulations and reinforcements are Cerebral Cortex Mar/Apr 1995, V 5 N 2 105 probably provided by diffuse neuromodulatory input to the cortex (Fig. 5). Of particular interest from the standpoint of coordination is the possibility that learning in the frontal cortex may be guided by the outputs from the basal ganglia and cerebellum. These outputs can be thought of as forcing functions for both execution and learning. These forcing functions could train the cortical-cortical network through the mechanism of "example setting" that was discussed in the section above on cell properties. This is because basal ganglia and cerebellar inputs to their respective cortical-thalamic modules are well positioned to alter the attractors of the cortical-cortical and cortical-thalamic arrays of the frontal lobe. On one hand, these alterations would serve to modify the collective computations being performed by the cortical network on a moment-bymoment basis. On the other hand, the same alterations would promote changes in the weights of the Hebbian synapses on pyramidal neurons that, in the long run, would move the network's attractors closer to the points being forced by cerebellar and basal ganglia modifications. As a consequence, the frontal cortex would become trained to perform, in a highly efficient and automatic fashion, those particular functions being forced on it by its subcortical inputs. This hypothesis contrasts with the traditional assumption that the cerebral cortex learns first and then trains subcortical structures. The Search for Intelligent Behavior How might the cortical-basal ganglionic, cortical-cerebellar, and cortical-cortical modular arrays discussed in this article contribute to intelligent motor behavior? Three decades ago Minsky (1963), in his thoughtful analysis of the major unresolved problems in the field of artificial intelligence, enumerated five broad areas of problem-solving activity: search, planning, pattern recognition, learning, and induction. Search comprises the immediate problem of selecting a solution (e.g., an action) from a large repertoire of potential solutions distributed in neural space. Exhaustive search of the entire solution space is a straightforward, but usually impractical, solution. As an alternative to such an inefficient approach, Minsky saw planning as an administrative facility for dividing complex problems into simpler subproblems and pattern recognition as a means to improve the efficiency of searching for a solution by categorizing the search into small domains. Minsky viewed learning as a means for directing, through reinforcement, a search toward solutions that have worked for similar problems in the past. Finally, induction can be construed as the invention of novel solutions, plans, and pattern recognition capabilities to solve problems that the individual has never encountered. In this section, we use the global summary of Figure 5 as a basis for discussing how the basal ganglia, cerebellum, and cerebral cortex might function together in the implementation of Minsky's concepts for intelligent behavior. We posit that, ultimately, the search for an action depends on cortical-cerebellar modules, taking particular advantage of the unique cellular specializations of Purkinje cells for pattern classification. Some automatic actions, of course, bypass the cerebellum and are controlled exclusively by brainstem and spinal premotor networks, as a reflex or a sensorimotor habit. However, when the choice of an action or its implementation is reasonably complex, the cerebellum is likely to be involved (Ito, 1984; Houk and Barto, 1992; Thach et aI., 1992). According to the theory espoused here, cortical-cerebellar arrays not only retrieve a stored motor program, but also see through the execution of the action to the point of recognizing the conditions for its termination. In doing so, cortical-cerebellar modules create an output pattern that is temporal as well as spatial and comprises the activity in a large array of effector 106 Distributed Modules in Motor Control' Houk and Wise premotor circuits. When activated and executed, these processes and their sequelae represent the completed search. Planning may depend on the context recognition function of the cortical-basal ganglionic modules. Through the mediation of the frontal cortex (Fig. 5), context information could be used by cortical-cerebellar modules to plan actions on the basis of the motivational, sensorimotor, and cognitive context. In an overly simplistic example, one can envision the basal ganglia as recognizing one of two potential contexts, each associated with half of the potential solution space, which thereby speeds search by a factor of 2. By recognizing a greater variety of contexts, the basal ganglia's contribution could promote the efficiency of the search many fold. Indeed, without such context recognition, the ability of the cerebellar cortex to use its pattern classification mechanism for choosing and implementing appropriate actions would be quite limited (Rosenblatt, 1962; Minsky and Papert, 1969). By tapping into the cortical information arrays, the cerebellar cortex is able to draw on inputs beyond crude sensory and motor states so as to include the wealth of processed information available in the cortical arrays. The mediation of the frontal cortex in this coordination deserves further comment. As discussed earlier, one type of recoding involves the formation of feature maps based on information-maximizing principles (Barlow, 1989). Although a pattern classifier functions better when presented with features, an even more substantial improvement can be achieved if the pattern classifier is presented with high-order properties, provided these properties are of "heuristic" value (Minsky, 1963). The striatum is ideally situated to perform this heuristic classification, because its pattern recognition is guided by training signals representing predictions of reward (Schultz et aI., 1995). Its spiny neurons sample a diverse input space that comprises sensory states, features, motor intentions, and high-level properties generated by its own contextencoding actions. The postulated ability of the basal ganglia to use contexts that it initially detects to encode yet more complex contexts is potentially very powerful, due to the recursive nature of this computation. To Minsky (1963), learning controls the navigation through solution space and does so on the basis of experience. He discussed in some detail the problem of credit assignment, which is one of the major obstacles to effective learning in complex systems. Credit assignment involves getting the right training information to the right location (spatial credit assignment) at the right time (temporal credit assignment) for it to be effective in guiding the learning process. The topographical nature of climbing fiber input to the cerebellum (Oscarsson, 1980; Voogd and Bigare, 1980) and of dopamine projections onto the striatum (Graybiel, 1991; Gerfen, 1992) could help to resolve the spatial credit assignment problem, and the predictive nature of dopamine signals would help to resolve the temporal credit assignment problem (Houk et aI., 1995). Induction represents the highest of Minsky's processes: the generation and evaluation of novel solutions represents the central problem of intelligent behavior, We have already discussed the importance of recursion in the encoding of ever-higher level contexts. Recursion and self-reference, were these processes to take into account the overall success or failure of the action-guidance system as a whole, might serve as a powerful tool in the process of induction. We conclude with a thought about thinking. By focusing on the motor system we have been able to avoid the issue of conscious awareness, since intelligent guidance of action regularly occurs in the absence of consciousness (Goodale et aI., 1991). However, the principles of distributed modular architectures that we have disussed in this article may have rele- vance for a broad scope of cognition, as evidenced by recent treatises that have discussed modularity in the highest brain functions (Fodor, 1983; Minsky, 1986). Notes 1. The relevant "state space" is n dimensional, where n is the number of neurons and each axis characterizes a neuron's state, for example, its activation or firing rate. This work was supported by a Center Grant from the National Institutes of Mental Health (P50 MH 48185) to Dr. Houk. Correspondence should be addressed to Dr. J. C. Houk, Department of Physiology, Northwestern University Medical Center, 303 East Chicago Avenue, Chicago, IL 606 11. References Albin RL, Young AB, Penney JB (1989) The functional anatomy of basal ganglia disorders. Trends Neurosci 12:366-375. Albus JS (1971) A theory of cerebellar functions. Math Biosci 10:2561. Alexander GE (1987) Selective neuronal discharge in monkey putamen reflects intended direction of planned limb movements. Exp Brain Res 67:623-634. Alexander GE, Crutcher M (1990) Preparation for movement: neural representations of intended direction in three motor areas of the monkey.] NeurophysioI64:133-150. Alexander GE, DeLong MR, Strick PL (1986) Parallel organization of functionally segregated circuits linking basal ganglia and cortex. Annu Rev Neurosci 9:357-381. Alexander GE, Crutcher MD, DeLong MR (1990) Basal ganglia-thalamocortical circuits: parallel substrates for motor oculomotor "prefrontal" and "limbic" functions. Prog. Brain Res 85:119-146. Alexander ME, Wickens JR (1993) Analysis of striatal dynamics: the existence of two modes of behavior.J Theor Bioi 163:413-438. Allen GI, Tsukahara N (1974) Cerebro-cerebellar communication systems. Physiol Rev 54:957-1006. Anderson JA, Silverstein]W; Ritz SA,Jones RS (1977) Distinctive features, categorical perception, and probability learning: some applications of a neural model. Psychol Rev 84:413-451. Anderson ME, Turner RS (1991) Activities of neurons in cerebellarreceiving and pallidal-receiving areas of the thalamus of the behaving monkey.] NeurophysioI66:879-893. Apicella p, Scarnati E, Schultz W (1991) Tonically discharging neurons of monkey striatum respond to preparatory and rewarding stimuli. Exp Brain Res 84:672-675. Arbib, MA (1987) Brains, machines, and mathematics, 2d ed. New York: Springer. Aronin N, Chase K, DiFiglia M (1986) Glutamic acid decarboxylase and enkephalin immunoreactive axon terminals in the rat neostriatum synapse with striatonigral neurons. Brain Res 421:151158. Asanuma C, Thach WT, Jones EG (1983) Distribution of cerebellar terminations and their relation to other afferent terminations in the ventral lateral region of the monkey. Brain Res Rev 5:237265. Barlow HB (1989) Unsupervised learning. Neural Comput 1:295311. Bassant MH, Ennouri K, Lamour Y (1990) Effects of iontophoretically applied monoamines on somatosensory cortical neurons of unanesthetized rats. Neuroscience 39:431-439. Bear MF, Kleinschmitt A, Gu Q, Singer WJ (1990) Disruption of experience-dependent synaptic modifications in striate cortex by infusion of an NMDA receptor antagonist.J Neurosci 10:909-925. Berardelli A, Dick JPR, Rothwell JC, Day BL, Marsden CD (1986) Scaling of the size of the first agonist EMG burst during rapid wrist movements in patients with Parkinson's disease. J Neurol Neurosurg Psychiatr 49:1273-1279. Berthier NE, Singh Sp' Barto AG, Houk JC (1993) Distributed representation of limb motor programs in arrays of adjustable pattern generators.J Cognit Neurosci 5:56-78. Bjaalie JG, Brodal P (1989) Visual pathways to the cerebellum: segregation in the pontine nuclei of terminal fields from different visual cortical areas in the cat. Neuroscience 29:95-107. Brodal P (1987) Organization of cerebropontocerebellar connections as studied with anterograde and retrograde transport of HRP-WGA in the cat. In: New concepts in cerebellar neurobiology (KingJS, ed), pp 151-182. New York: Liss. Brotchie p,lansek R, Horne MK (1991) Motor function of the globus pallidus. 2. Cognitive aspects of movement and phasic neuronal activity. Brain 114:1685-1702. Brown RG, Marsden CD (1988) Internal vs. external cues and the control of attention in Parkinson's disease. Brain 111:323-345. Bullock D, Grossberg S (1988) Neural dynamics of planned arm movements: emergent invariants and speed-accuracy properties during trajectory formation. Psychol Rev 95:49-90. Chapman CE, Spidalieri G, Lamarre Y (1986) Activity of dentate neurons during arm movements triggered by visual, auditory, and somesthetic stimuli in the monkey.] Neurophysiol 55:203-226. Chevalier G, Deniau JM (1990) Disinhibition as a basic process in the expression of striatal functions. Trends Neurosci 13:277-280. Decety J, Sjoeholm H, Ryding E, Stenberg G, Ingvar DH (1990) The cerebellum participates in mental activity: tomographic measurements of regional cerebral blood flow. Brain Res 535:313-317. DeFelipe J, Conley M, Jones EG (1986) Long-range focal collateralization ofaxons arising from corticocortical cells in the monkey sensory-motor cortex.J Neurosci 6:3749-3766. DeLong MR (1990) Primate models of movement disorders of basal ganglia origin. Trends Neurosci 13:281-285. DeLong MR, Georgopoulos AP (1981) Motor functions of the basal ganglia. In: Handbook of physiology, Sec 1, The nervous system, Vol II, Motor control, 2 (Brookhart JM, Mountcastle VB, Brooks VB, Geiger SR, eds), pp 1017-1061. Bethesda, MD: American Physiological Society. Dominey PF, Arbib MA (1992) A cortico-subcortical model for generation of spatially accurate sequential saccades. Cereb Cortex 2: 153-175. Dugas C, Smith AM (1992) Responses of cerebellar Purkinje cells to slip of a hand-held object.J NeurophysioI67:483-495. Eisenman LN, Keifer J, Houk JC (1991) Positive feedback in the cerebra-cerebellar recurrent network may explain rotation of population vectors. In: Analysis and modelling of neural systems (Eeckman F, ed), pp 371-376. London: Kluwer. Ekerot C-F (1984) Climbing fibre actions of Purkinje cells-s-plateau potentials and long-lasting depression of parallel fibre responses. In: Cerebellar functions (Bloedel J, et al., eds), pp 268-274. Berlin: Springer. Felleman DJ, Van Essen DC (1991) Distributed hierarchical processing in the primate cerebral cortex. Cereb Cortex 1:1-47. Flaharty AW, Graybiel AM (1991) Corticostriatal transformations in the primate somatosensory system. Projections from physiologically mapped body-part reprcscntations.] Neurophysiol 66: 12491263. Flaharty AW, Graybiel AM (1993) Output architecture of the primate putamen.J Neurosci 13:3222-3237. Flowers KA, Robertson C (1985) The effect of Parkinson's disease on the ability to maintain mental set.J Neurol Neurosurg Psychiatr 48:517-529. Fodor JA (1983) The modularity of mind. Cambridge, MA:MIT Press. Fortier PA, Smith AM, Kalaska JF (1993) Comparison of cerebellar and motor cortex activity during reaching: directional tuning and response variability.J NeurophysioI69:1136-1149. Freeman W (1979) Nonlinear dynamics of paleocortex manifested in the olfactory EEG. Bioi Cybern 3:21-37. Frith CD (1992) The cognitive neuropsychology of schizophrenia. Hove, UK: Erlbaum. Funahashi S, Bruce C], Goldman-Rakic PS (1989) Mnemonic coding of visual space in the monkey's dorsolateral prefrontal cortex. J NeurophysioI61:331-349. Fuster JM, Alexander GE (1973) Firing changes in cells of the nucleus medialis dorsalis associated with delayed response behavior. Brain Res 61:79-91. Gardiner Tw, Nelson RJ (1992) Striatal neuronal activity during the initiation and execution of hand movements made in response to visual and vibratory cues. Exp Brain Res 92:15-26. Georgopoulos Ap, Taira M, Lukashin A (1993) Cognitive neurophysiology of the motor cortex. Science 260:47-52. Gerfen CR (1992) The neocortex mosaic: multiple levels of compartmental organization in the basal ganglia. Annu Rev Neurosci 15:285-320. Gerfen CR, Engber TM, Mahan LC, Susel Z, Chase TN, Monsma FJ, Cerebral Cortex Mar/Apr 1995, V 5 N 2 107 Silbey DR (1990) 0, and 0, dopamine receptor-regulated gene expression of striatonigral and striatopallidal neurons. Science 250: 1429-1432. Ghez C, Hening \v, Favilla M (1990) Parallel interacting channels in the initiation and specification of motor response features. In: Attention and performance, Vol XIII, Motor representation and control (Jeannerod M, ed), pp 265-293. Hillsdale, N]: Erlbaum. Ghosh S, Murray GM, Turman AB, Rowe M] (1994) Corticothalamic influences on transmission of tactile information in the ventroposterolateral thalamus of the cat: effect of reversible inactivation of somatosensory cortical areas I and II. Exp Brain Res 100:276286. Gibson AR, Robinson FR, Alam], Houk]C (1987) Somatotopic alignment between climbing fiber input and nuclear output of the intermediate cerebellum.] Comp Neurol 260:362-377. Gielen CCAM, van Gisbergen]AM (1990) The visual guidance of saccades and fast aiming movements. News Physiol Sci 5:58-63. Gilbert C, Wiesel TN (1981) Laminar specialization and intracortical connections in cat primary visual cortex. In: The organization of the cerebral cortex (Schmitt FO, Worden FG, Adelman G, Dennis SG, eds), pp 163-191. Cambridge, MA: MIT Press. Gilbert CD, Wiesel TN (1983) Clustered intrinsic connections in cat visual cortex.] Neurosci 3:1116-1133. Goldman PS, Nauta W]H (1977) Columnar distribution of corticocortical fibers in the frontal association, limbic, and motor cortex of the developing rhesus monkey. Brain Res 122:393-413. Goldman-Rakic PS (1984) Modular organization of prefrontal cortex. Trends Neurosci 7:419-429. Goldman-Rakic PS (1988a) Topography of cognition: parallel distributed networks in primate association cortex. Annu Rev Neurosci 11:137- I 56. Goldman-Rakic PS (1988b) Changing concepts of cortical connectivity: parallel distributed cortical networks. In: Neurobiology of neocortex (Rakic P, Singer \v, eds), pp 177-202. New York: Wiley. Goldman-Rakic PS, Friedman HR (1991) The circuitry of working memory revealed by anatomy and metabolic imaging. In: Frontal lobe function and dysfunction, Chap 4 (Levin HS, Eisenberg HM, Benton AL, eds), pp 72-91. New York: Oxford UP. Goodale MA, Milner AD,]akobson LS, Carey DP (1991) A neurological dissociation between perceiving objects and grasping them. Nature 349: 154-156. Graybiel AM (1991) Basal ganglia-input, neural activity, and relation to the cortex. Curr Opin Neurobiol 1:644-651. Grossberg S (1980) How does a brain build a cognitive code? Psych Rev 87:1-51. Grossberg S, Kuperstein M (1989) Neural dynamics of adaptive sensory-motor control. New York: Pergamon. Groves PM (1983) A theory of the functional organization of the neostriatum and the neostriatal control of voluntary movement. Brain Res Rev 5:109-132. Hallett M (1993) Physiology of basal ganglia disorders: an overview-Silversides lecture. Can] Neurol Sci 20:177-183. Hallett M, Khoshbin S (1980) A physiological mechanism of bradykinesia. Brain 103:301-314. Harvey R], Porter R, Rawson]A (1977) The natural discharges of Purkinje cells in paravermal regions of lobules V and VI of the monkey's cerebellum.] Physiol (Lond) 271:515-536. Harvey R], Porter R, Rawson]A (1979) Discharges of intracerebellar nuclear cells in monkeys.] Physiol (Lond) 297:559-580. Hazrati L-N,Parent A (1992) Convergence of subthalamic and striatal efferents at pallidal level in primates: an anterograde double-labeling study with biocytin and PHA-L.Brain Res 569:336-340. Hikosaka (1989) Role of basal ganglia in initiation of voluntary movements. In: Dynamic interactions in neural networks: models and data (Arbib MA,Amari S, eds),pp 153-167. New York: Springer. Hikosaka 0, Wurtz RH (1983) Visual and oculomotor functions of monkey substantia nigra pars reticulata. IV Relation of substantia nigra to superior colliculus.] NeurophysioI49:1285-1301. Hikosaka 0, Sakamoto M, Usui S (1989a) Functional properties of monkey caudate neurons. II. Visual and auditory responses.] NeurophysioI61:799-813. Hikosaka 0, Sakamoto M, Usui S (1989b) Functional properties of monkey caudate neurons. III. Activities related to expectation of target and reward.] NeurophysioI61:814-832. ° 108 Distributed Modules in Motor Control- Houk and Wise Hinton GE, Shallice T (1991) Lesioning an attractor network: investigations of acquired dyslexia. Psychol Rev 98:74-95. Holmes G (1939) The HugWings Jackson memorial lecture, The cerebellum of man. Brain 62:1-30. Hoover ]E, Strick PL (1993) Multiple output channels in the basal ganglia. Science 259:819-821. Hopfield]] (1982) Neural networks and physical systems with emergent collective computational abilities. Proc Natl Acad Sci USA 79: 2554-2558. Hopfield]] (1984) Neurons with graded response have collective computational properties like those of two-state neurons. Proc Natl Acad Sci USA 81:3088-3092. Horak FB, Anderson ME (1984) Influence of globus pallidus on arm movements in monkeys. I. Effects of kainic acid-induced lesions.] Neurophysiol 52:290-304. Houk]C (1989) Cooperative control of limb movements by the motor cortex brainstem and cerebellum. In: Models of brain function (Cotterill RM], ed), pp 309-325. Cambridge: Cambridge UP. Houk ]C, Barto AG (1992) Distributed sensorimotor learning. In: Tutorials in motor behavior II (Stelmach GE, Requin], eds), pp 71100. Amsterdam: Elsevier. Houk ]C, Gibson AR (1987) Sensorimotor processing through the cerebellum. In: New concepts in cerebellar neurobiology (King ]S, ed), pp 387-416. New York: Liss. Houk ]C, Wise SP (1993) Outline for a theory of motor behavior. In: Research notes in neural computing, Vol IV; Neuroscience: from neural networks to artificial intelligence (Rudomin P, Arbib MA, Cervantes-Perez F, eds), pp 452-470. Heidelberg: Springer. Houk ]C, Singh Sp' Fisher C, Barto AG (1990) An adaptive sensorimotor network inspired by the anatomy and physiology of the cerebellum. In: Neural networks for control (Miller WT, Sutton RS, Werbos P], eds), pp 301-348. Cambridge, MA: MIT Press. Houk ]C, Galiana HL, Guitton 0 (1992) Cooperative control of gaze by the superior colliculus, brainstem and cerebellum. In: Tutorials in motor behavior II (Stelmach GE, Requin], eds), pp 443-474. Amsterdam: Elsevier. Houk ]C, Keifer ], Barto AG (1993) Distributed motor commands in the limb premotor network. Trends Neurosci 16:27-33. Houk ]C, Adams ]L, Barto AG (1995) A model of how the basal ganglia generates and uses neural signals that predict reinforcement. In: Models of information processing in the basal ganglia, Chap 13 (Houk ]C, Davis ]L, Beiser DG, eds), in press. Cambridge, MA: MIT Press. Huntley G\v,]ones EG (1991) Relationship of intrinsic connections to forelimb movement representations in monkey motor cortex: a correlative anatomic and physiological study.] Neurophysiol66: 390-413. Ito M (1984) The cerebellum and neural control. New York: Raven. Jones EG (1985) The thalamus. New York: Plenum. Jones EG, Coulter ]0, Hendry SHC (1978) Intracortical connections of architectonic fields in the somatic sensory, motor, and parietal cortex of monkeys.] Comp Neurol 181:291-348. Kawaguchi Y, Wilson C], Emson PC (1990) Projection subtypes of rat neostriatal cells revealed by intracellular injection of biocytin. ] Neurosci 10:3421-3438. Kawato M, Gomi H (1992) A computational model of four regions of the cerebellum based on feedback-error learning. BioI Cybern 68:95-103. Kawato M, Furukawa K, Suzuki R (1987) A hierarchical neural-network model for control and learning of voluntary movement. BioI Cybern 56:1-17. Kimura M (1990) Behaviorally contingent property of movementrelated activity of the primate putamen.] NeurophysioI63:12771296. Kimura M (1992) Behavioral modulation of sensory responses of primate putamen neurons. Brain Res 578:204-214. Kimura M, Rajkowski], Evarts EV (1984) Tonically discharging putamen neurons exhibit set-dependent responses. Proc Natl Acad Sci USA 81:4998-5001. Kimura M, Kato M, Shimazaki H (1990) Physiological properties of projection neurons in the monkey striatum to the globus pallidus. Exp Brain Res 82:672-676. Kohonen T (1972) Correlation matrix memories. IEEE Trans Comput C-21:353-359. Kornhuber HH (1971) Motor functions of cerebellum and basal gan- glia: the cerebellocortical saccadic (ballistic) clock, the cerebellonuclear hold regulator, and the basal ganglia ramp (voluntary speed smooth movement) generator. Kybernetik 8:157-162. Lisberger SG (1988) The neural basis for learning of simple motor skills. Science 242:728-735. Ljungberg T, Apicella l' Schultz W (1991) Responses of monkey dopamine neurons to external stimuli: changes with learning. In: The basal ganglia 111 (Bernardi G, Carpenter MB, Di Chiara G, Morelli M, Stanzione l' eds), pp 487-494. New York: Plenum. Ljungberg T, Apicella P Schultz W (1992) Responses of monkey dopamine neurons during learning of behavioral reactions.] NeurophysioI67:145-163. Ulnas R (1988) The intrinsic electrophysiological properties of mammalian neurons: insights into central nervous system function. Science 242:1654-1664. Llinas R, Sugimori M (1980) Electrophysiological properties of in vitro Purkinje cell dendrites in mammalian cerebellar slices. ] Physiol (Lond) 305:197-213. Mano N, Yamamoto K (1980) Simple-spike activity of cerebellar Purkinje cells related to visually guided wrist tracking movement in the monkey.] Neurophysiol 43:713-728. Marr D (1969) A theory of cerebellar cortex.] Physiol (Lond) 202: 437-470. Marsden CD (1982) The mysterious motor function of the basal ganglia: the Robert Wartenburge lecture. Neurology 32:514-539. McCormick DA, Connors BW; Lighthall ;W; Prince DA (1985) Comparative electrophysiology of pyramidal and sparsely spiny stellate neurons of the neocortex.] Neurophysiol 54:782-806. Mercier B, Legg C, Glickstein M (1990) Basal ganglia and cerebellum receive different somatosensory information in rats. Proc Natl Acad Sci USA 87:4388-4392. Miall RC, Weir D], Wolpert DM, Stein]F (1993) Is the cerebellum a Smith predictor? ] Mot Behav 25:203-216. Mink]W; Thach WT (1991) Basal ganglia motor control. III. Pallidal ablation: normal reaction time muscle cocontraction and slow movement.] NeurophysioI65:330-351. Minsky ML (1963) Steps toward artificial intelligence. In: Computers and thought (Feigenbaum EA, Feldman ], eds), pp 406-450. New York: McGraw-Hill. Minsky M (1986) The society of mind. New York: Simon and Schuster. Minsky ML, Papert SA (1969) Perceptrons. Cambridge, MA: MIT Press. Moll L, Kuypers HG]M (1977) Premotor cortical ablations in monkeys: contralateral changes in visually guided reaching behavior. Science 198:317-319. Mountcastle VB (1978) An organizing principle for cerebral function: the unit module and the distributed system. In: The mindful brain (Edelman GM, Mountcastle VB, eds), pp 36-41. Cambridge, MA: MIT Press. Murphy PC, Grieve KL, Sillito AM (1993) Effects of vasoactive intestinal polypeptide on the response properties of cells in area 17 of the cat visual cortex.] NeurophysioI69:1465-1474. Nilsson N] (1965) Learning machines. New York: McGraw-Hill. Oscarsson 0 (1980) Functional organization of olivary projections to the cerebellar anterior lobe. In: The inferior olivary nucleus: anatomy and physiology (Courville], Montigny CD, Lamarre, eds), pp 279-289. New York: Raven. Owen AM, Roberts AC, Hodges ]R, Summers BA, Polkey CE, Robbins TW (1993) Contrasting mechanisms of impaired attentional setshifing in patients with frontal lobe damage or Parkinson's disease. Brain 116:1159-1175. Page RD, Sambrook MA, Crossman AR (1993) Thalamotomy for the alleviation of levodopa-induced dyskinesia: experimental studies in the I-methyl-4-phenyl-l ,2,3,6-tetrahydropyridine-treated Parkinsonian monkey. Neuroscience 55:147-165. Parthasarathy HB, Schall ]D, Graybiel AM (1992) Distributed but convergent ordering of corticostriatal projections: analysis of the frontal eye field and the supplementary eye field in the macaque monkey.] Neurosci 12:4468-4488. Passingham RE (1993) The frontal lobes and voluntary action. New York: Oxford UP. Pennartz CMA, Kitai ST (1991) Hippocampal inputs to identified neurons in an in vitro slice preparation of the rat nucleus accum- bens-evidence for feed-forward inhibition.] Neurosci 11 :28382847. Peterson BW;Baker ]F, Houk]C (1991) A model of adaptive control of vestibuloocular reflex based on properties of cross-axis adaptation. Ann NY Acad Sci 627:319-337. Petersen B, Riddle MA, Cohen D], Katz LD, Smith ]C, Hardin MT,Leekman]F (1993) Reduced basal ganglia volumes in Tourette's syndrome using three-dimensional reconstruction techniques from magnetic resonance images. Neurology 43:941-949. Rakic P (1988) Specification of cerebral cortical areas. Science 241: 170-176. Reiter HO, Striker MP (1989) Neural plasticity without postsynaptic action potentials: less active inputs become dominant when visual cortical cells are pharmacologically inhibited. Proc Natl Acad Sci USA 85:3623-3627. Rolls ET,Thorpe S], Madison SP (1983) Responses of striatal neurons in the behaving monkey. 1. Head of the caudate nucleus. Behav Brain Res 7:179-210. Romo R, Schultz W (1992) Role of primate basal ganglia and frontal cortex in the internal generation of movements. III. Neuronal activity in the supplementary motor area. Exp Brain Res 91:396407. Rosenblatt F (1962) Principles of neurodynamics. New York: Spartan. Rummelhart DE, Hinton GE, McClelland]L (1987) A general framework for parallel distributed processing. In: Parallel distributed processing, Vol, 1, Foundations (Rummelhart DE, McClelland ]L, eds), pp 45-76. Cambridge, MA: MIT Press. Schlagger BR, Fox K, O'Leary DDM (1993) Postsynaptic control of plasticity in developing somatosensory cortex. Nature 364:623626. Schultz W; Romo R (1988) Neuronal activity in the monkey striatum during the initiation of movements. Exp Brain Res 71:431-436. Schultz W; Romo R (1992) Role of primate basal ganglia and frontal cortex in the internal generation of movements. I. Preparatory activity in the anterior striatum. Exp Brain Res 91:363-384. Schultz W; Apicella P Ljungberg T (1993) Responses of monkey dopamine neurons to reward and conditioned stimuli during successive steps of learning a delayed response task.] Neurosci 13: 900-913. Schultz W; Romo R, Ljungberg T, Mirenowicz ], Hollerman]R (1995) Dopamine neurons carry reward-related signals. In: Models of information processing in the basal ganglia, Chap 12 (Houk ]C, Davis ]L, Beiser DG, eds), in press. Cambridge, MA: MIT Press. Selemon L, Goldman-Rakic P (1985) Longitudinal topography and interdigitation of corticostriatal projects in the rhesus monkey.] Neurosci 5:776-794. Selemon L, Goldman-Rakic P (1988) Common cortical and subcortical targets of the dorsolateral prefrontal and posterior parietal cortices in the rhesus monkey: evidence for a distributed neural network subserving spatially guided behavior.] Neurosci 8:40494068. Shallice T (1998) From neuropsychology to mental structure. Cambridge: Cambridge UP. Shepherd GM (1990) The synaptic organization of the brain, 3d ed. London: Oxford UP. Shinoda Y, Kakei S (1989) Distribution of terminals of thalamocortical fibers originating from the ventrolateral nucleus of the cat thalamus. Neurosci Lett 96:163-167. Shinoda Y, Sugiuchi Y, Futami T, Izawa R (1992) Axon collaterals of mossy fibers from the pontine nucleus in the cerebellar dentate nucleus.] NeurophysioI67:547-560. Shinoda Y, Kakei S, Futami T, Wannier T (1993) Thalamocorticalorganization in cerebello-thalamo-cortical system. Cereb Cortex 3: 421-429. Singer HS, Reiss AL, Brown ]E, Aylward EH, Shih B, Chee E, Harris EL, Reader M], Chage GA, Bryan RN, DenckJa MB (1993) Volumetric MRI changes in basal ganglia of children with Tourette's syndrome. Neurology 43:950-956. Stein]F, Glickstein M (1992) The role of the cerebellum in the visual guidance of movement. Physiol Rev 72:967-1017. Tank DW; Hopfield]] (1987) Collective computation in neuron-like circuits. Sci Am 255(12):104-114. Thach WT, Goodkin HG, Keating]G (1992) Cerebellum and the Cerebral Cortex Mar/Apr 1995, V 5 N 2 109 adaptive coordination of movement. Annu Rev Neurosci 15:403442. Thompson RF (1986) The neurobiology of learning and memory. Science 233:941-947. Tremblay L, Filion M (1989) Responses of pallidal neurons to striatal stimulation in intact waking monkeys. Brain Res 498: 1-16. van Kan PLE, Houk JC, Gibson AR (1993a) Output organization of intermediate cerebellum of the monkey. J Neurophysiol 69:5773. van Kan PLE, Gibson AR, Houk JC (1993b) Movement-related inputs to intermediate cerebellum of the monkey.] NeurophysioI69:7494. Voogd J, Bigare F (1980) Topographical distribution of olivary and corticonuclear fibers in the cerebellum. A review. In: The inferior olivary nucleus (Courville J, de Montigny C, Lamarre Y, eds), pp 207-234. New York: Raven. Wang X-J, Rinzel J, Rogawski MA (1991) A model of the T-type calcium current and the low-threshold spike in thalamic neurons. J Neurophysiol 66:839-850. Waterhouse BD, Azizi SA, Burne RA, Woodward OJ (1990) Modulation of rat cortical area 17 neuronal responses to moving visual stimuli during norepinephrine and serotonin microiontophoresis. Brain Res 514:276-292. Wickens J (1990) Striatal dopamine in motor activation and rewardmediated learning: steps towards a unifying model. J Neural Transm 80:9-31. Wilson CJ (1990) Basal ganglia. In: The synaptic organization of the brain (Shepherd GM, ed), pp 279-316. London: Oxford UP. Wilson CJ (1995) The contribution of cortical neurons to the firing pattern of striatal spiny neurons. In: Models of information processing in the basal ganglia, Chap 3 (Houk JC, Davis JL, Beiser DG, eds), in press. Cambridge, MA: MIT Press. Wilson CJ, Groves PM (1980) Fine structure and synaptic connections of the common spiny neurons of the rat neostriatum: a study employing intracellular injections of horseradish peroxidase. J Comp Neurol 194:599-615. Wise SP, Houk JC (1994) Modular neuronal architecture for planning and controlling behavior. Bioi Commun Danish R Acad Sci Lett 43:21-33. Wise Sp,RapoportJL (1988) Obsessive-compulsive disorder: is it basal ganglia dysfunction? In: Obsessive-compulsive disorder in children and adolescents (Rapoport IL, ed), pp 327-344. Washington, DC: American Pychiatric. Yeterian EH, Van Hoesen GW (1978) Cortico-striate projections in the rhesus monkey: the organization of certain cortico-caudate connections. Brain Res 139:43-63. Yuen GL, Hockberger PE, Massone LE, Houk JC (1992) Qualitative dynamical model of bistability in Purkinje cell dendrites. Soc Neurosci Abstr 18:1206. Zipser 0, Anderson RE (1988) A back-propagation programmed network that simulates response properties of a subset of posterior parietal neurons. Nature 331 :679-684. 110 Distributed Modules in Motor Control' Houk and Wise