Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Neurocomputational speech processing wikipedia , lookup
Human brain wikipedia , lookup
Single-unit recording wikipedia , lookup
Catastrophic interference wikipedia , lookup
Executive functions wikipedia , lookup
Biology and consumer behaviour wikipedia , lookup
Time perception wikipedia , lookup
Cognitive neuroscience of music wikipedia , lookup
Molecular neuroscience wikipedia , lookup
Activity-dependent plasticity wikipedia , lookup
Neuroscience in space wikipedia , lookup
Neural modeling fields wikipedia , lookup
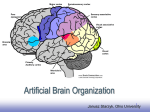
Artificial general intelligence wikipedia , lookup
Multielectrode array wikipedia , lookup
Donald O. Hebb wikipedia , lookup
Neural oscillation wikipedia , lookup
Convolutional neural network wikipedia , lookup
Holonomic brain theory wikipedia , lookup
Recurrent neural network wikipedia , lookup
Binding problem wikipedia , lookup
Mirror neuron wikipedia , lookup
Clinical neurochemistry wikipedia , lookup
Environmental enrichment wikipedia , lookup
Sensory substitution wikipedia , lookup
Types of artificial neural networks wikipedia , lookup
Neuroplasticity wikipedia , lookup
Neural coding wikipedia , lookup
Neuroeconomics wikipedia , lookup
Embodied language processing wikipedia , lookup
Caridoid escape reaction wikipedia , lookup
Metastability in the brain wikipedia , lookup
Neural correlates of consciousness wikipedia , lookup
Stimulus (physiology) wikipedia , lookup
Neuroanatomy wikipedia , lookup
Development of the nervous system wikipedia , lookup
Pre-Bötzinger complex wikipedia , lookup
Neuropsychopharmacology wikipedia , lookup
Circumventricular organs wikipedia , lookup
Nervous system network models wikipedia , lookup
Optogenetics wikipedia , lookup
Synaptic gating wikipedia , lookup
Premovement neuronal activity wikipedia , lookup
Central pattern generator wikipedia , lookup
Channelrhodopsin wikipedia , lookup
Embodied cognitive science wikipedia , lookup
Design of Self-Organizing Learning Array for Intelligent Machines Janusz Starzyk School of Electrical Engineering and Computer Science Heidi Meeting June 3 2005 Motivation: How a new understanding of the brain will lead to the creation of truly intelligent machines from J. Hawkins “On Intelligence” 1 EE141 Elements of Intelligence Abstract thinking and action planning Capacity to learn and memorize useful things Spatio-temporal memories Ability to talk and communicate Intuition and creativity Consciousness Emotions and understanding others Surviving in complex environment and adaptation Perception Motor skills in relation to sensing and anticipation 2 EE141 Problems of Classical AI Lack of robustness and generalization No real-time processing Central processing of information by a single processor No natural interface to environment No self-organization Need to write software 3 EE141 Intelligent Behavior Emergent from interaction with environment Based on large number of sparsely connected neurons Asynchronous Self-timed Interact with environment through sensorymotor system Value driven Adaptive 4 EE141 Design principles of intelligent systems from Rolf Pfeifer “Understanding of Intelligence” Design principles synthetic methodology time perspectives emergence diversity/compliance frame-of-reference Agent design complete agent principle cheap design ecological balance redundancy principle parallel, loosely coupled processes sensory-motor coordination value principle 5 EE141 The principle of “cheap design” intelligent agents: “cheap” exploitation of ecological niche economical (but redundant) exploitation of specific physical properties of interaction with real world 6 EE141 Principle of “ecological balance” balance / task distribution between morphology neuronal processing (nervous system) materials environment balance in complexity given task environment match in complexity of sensory, motor, and neural system 7 EE141 The redundancy principle redundancy prerequisite for adaptive behavior partial overlap of functionality in different subsystems sensory systems: different physical processes with “information overlap” 8 EE141 Generation of sensory stimulation through interaction with environment multiple modalities constraints from morphology and materials generation of correlations through physical process basis for crossmodal associations 9 EE141 The principle of sensory-motor coordination Holk Cruse self-structuring of sensory data through interaction with environment physical process — not „computational“ prerequisite for learning •no central control •only local neuronal communication •global communication through environment neuronal connections 10 EE141 The principle of parallel, loosely coupled processes Intelligent behavior emergent from agent-environment interaction Large number of parallel, loosely coupled processes Asynchronous Coordinated through agent’s –sensory-motor system –neural system –interaction with environment 11 EE141 Neuron Structure and SelfOrganizing Principles Human Brain at Birth EE141 6 Years Old 14 Years Old 12 12 Neuron Structure and SelfOrganizing Principles (Cont’d) 13 EE141 Motor cortex Somatosensory cortex Sensory associative cortex Pars opercularis Visual associative cortex Broca’s area Visual cortex Primary Auditory cortex Wernicke’s area Brain Organization While we learn its functions can we emulate its operation? 14 EE141 Minicolumn Organization and Self Organizing Learning Arrays V. Mountcastle argues that all regions of the brain perform the same algorithm SOLAR combines many groups of neurons (minicolumns) in a pseudorandom way Each microcolumn has the same structure Thus it performs the same computational algorithm satisfying Mountcastle’s principle VB Mountcastle (2003). Introduction [to a special issue of Cerebral Cortex on columns]. Cerebral Cortex, 13, 2-4. 15 EE141 Cortical Minicolumns “The basic unit of cortical operation is the minicolumn … It contains of the order of 80-100 neurons except in the primate striate cortex, where the number is more than doubled. The minicolumn measures of the order of 40-50 m in transverse diameter, separated from adjacent minicolumns by vertical, cellsparse zones … The minicolumn is produced by the iterative division of a small number of progenitor cells in the neuroepithelium.” (Mountcastle, p. 2) Stain of cortex in planum temporale. 16 EE141 Groupping of Minicolumns Groupings of minicolumns seem to form the physiologically observed functional columns. Best known example is orientation columns in V1. They are significantly bigger than minicolumns, typically around 0.3-0.5 mm and have 4000-8000 neurons Mountcastle’s summation: “Cortical columns are formed by the binding together of many minicolumns by common input and short range horizontal connections. … The number of minicolumns per column varies … between 50 and 80. Long range intracortical projections link columns with similar functional properties.” (p. 3) 17 EE141 Sparse Connectivity The brain is sparsely connected. (Unlike most neural nets.) A neuron in cortex may have on the order of 100,000 synapses. There are more than 1010 neurons in the brain. Fractional connectivity is very low: 0.001%. Implications: Connections are expensive biologically since they take up space, use energy, and are hard to wire up correctly. Therefore, connections are valuable. The pattern of connection is under tight control. Short local connections are cheaper than long ones. Our approximation makes extensive use of local connections for computation. 18 EE141 Introducing Self-Organizing Learning Array SOLAR SOLAR is a regular array of identical processing cells, connected to programmable routing channels. Each cell in the array has ability to self-organize by adapting its functionality in response to information contained in its input signals. Cells choose their input signals from the adjacent routing channels and send their output signals to the routing channels. Processing cells can be structured to implement minicolumns 19 EE141 SOLAR Hardware Architecture 20 EE141 SOLAR Routing Scheme 21 EE141 PCB SOLAR 22 EE141 System SOLAR 23 EE141 Wiring in SOLAR Initial wiring and final wiring selection for credit card approval problem 24 EE141 SOLAR Classification Results 25 EE141 Associative SOLAR 26 EE141 Associations made in SOLAR 27 EE141 Brain Structure with Value System Properties Interacts with environment through sensors and actuators Uses distributed processing in sparsely connected neurons organized in minicolumns Uses spatio-temporal associative learning Uses feedback for input prediction and screening input information for novelty Develops an internal value system to evaluate its state in environment using reinforcement learning Plans output actions for each input to maximize the internal state value in relation to environment Uses redundant structures of sparsely connected processing elements 28 EE141 Possible Minicolumn Organization Value System Understanding Action Planning Expectation Improvement Detection Comparison Inhibition Novelty Detection Anticipated Response Reinf. Signal Sensors EE141 Sensory Inputs Motor Outputs Actuators 29 Postulates for Minicolumn Organization EE141 Learning should be restricted to unexpected situation or reward Anticipated response should have expected value Novelty detection should also apply to the value system Need mechanism to improve and compare the value Anticipated response block should learn the response that improves the value A RL optimization mechanism may be used to learn the optimum response for a given value system and sensory input Random perturbation should be applied to the optimum response to explore possible states and learn their the value New situation will result in new value and WTA will 30 chose the winner Minicolumn Selective Processing Sensory inputs are represented by more and more abstract features in the sensory inputs hierarchy Possible implementation is to use winner takes all or Hebbian circuits to select the best match “Sameness principle” of the observed objects to detect and learn feature invariances Time overlap of feature neuron activation to store temporal sequences Random wiring may be used to preselect sensory features Uses feedback for input prediction and screening input information for novelty Uses redundant structures of sparsely connected processing elements 31 EE141 Minicolumn Organization superneuron Value Positive Reinforcement Negative Reinforcement Sensory Sensory Inputs Motor Motor Outputs 32 EE141 Minicolumn Organization Sensory neurons are primarily responsible for providing information about environment They receive inputs from sensors or other sensory neurons on lower level They interact with motor neurons to represent action and state of environment They provide an input to reinforcement neurons They help to activate motor neurons Motor neurons are primarily responsible for activation of motor functions They are activated by reinforcement neurons with the help from sensory neurons They activate actuators or provide an input to lower level motor neurons They provide an input to sensory neurons Reinforcement neurons are primarily responsible for building the internal value system They receive inputs from reinforcement learning sensors or other reinforcement neurons on lower level They receive inputs from sensory neurons They provide an input to motor neurons They help to activate sensory neurons 33 EE141 Sensory Neurons Functions Sensory neurons Represent inputs from environment by Responding to activation from lower level (summation) Selecting most likely scenario (WTA) WTA Interact with motor functions by Responding to activation from motor outputs (summation) Anticipate inputs and screen for novelty by Correlation to sensory inputs from higher level Inhibition of outputs to higher level Select useful information by Correlating its outputs with reinforcement neurons Identify invariances by Making spatio-temporal associations between neighbor sensory neurons WTA WTA 34 EE141