Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Biology and consumer behaviour wikipedia , lookup
Environmental enrichment wikipedia , lookup
Neuroethology wikipedia , lookup
Artificial general intelligence wikipedia , lookup
Donald O. Hebb wikipedia , lookup
Stimulus (physiology) wikipedia , lookup
Single-unit recording wikipedia , lookup
Synaptogenesis wikipedia , lookup
Caridoid escape reaction wikipedia , lookup
Catastrophic interference wikipedia , lookup
Eyeblink conditioning wikipedia , lookup
Neural engineering wikipedia , lookup
Artificial neural network wikipedia , lookup
Mirror neuron wikipedia , lookup
Embodied language processing wikipedia , lookup
Neuroplasticity wikipedia , lookup
Convolutional neural network wikipedia , lookup
Cognitive neuroscience wikipedia , lookup
Neurophilosophy wikipedia , lookup
Neurotransmitter wikipedia , lookup
Holonomic brain theory wikipedia , lookup
Neural modeling fields wikipedia , lookup
Neural oscillation wikipedia , lookup
Molecular neuroscience wikipedia , lookup
Recurrent neural network wikipedia , lookup
Neuroinformatics wikipedia , lookup
Neuroanatomy wikipedia , lookup
Central pattern generator wikipedia , lookup
Feature detection (nervous system) wikipedia , lookup
Neural coding wikipedia , lookup
Development of the nervous system wikipedia , lookup
Biological neuron model wikipedia , lookup
Chemical synapse wikipedia , lookup
Nonsynaptic plasticity wikipedia , lookup
Pre-Bötzinger complex wikipedia , lookup
Premovement neuronal activity wikipedia , lookup
Types of artificial neural networks wikipedia , lookup
Metastability in the brain wikipedia , lookup
Basal ganglia wikipedia , lookup
Clinical neurochemistry wikipedia , lookup
Efficient coding hypothesis wikipedia , lookup
Neuroeconomics wikipedia , lookup
Activity-dependent plasticity wikipedia , lookup
Optogenetics wikipedia , lookup
Neuropsychopharmacology wikipedia , lookup
Channelrhodopsin wikipedia , lookup
Computational Modeling of the Basal Ganglia – Functional Pathways
and Reinforcement Learning
Pierre Berthet
Computational Modeling of the Basal
Ganglia
Functional Pathways and Reinforcement Learning
Pierre Berthet
c Pierre
Berthet, december 2015
ISSN 1653-5723 ISBN 978-91-7649-184-3
Printed in Sweden by US-AB, Stockholm 2015
Distributor: Department of Numerical Analysis and Computer Science, Stockholm University
Cover image by Danielle Berthet, under creative common license CC-BY-NC-SA 4.0
Abstract
We perceive the environment via sensor arrays and interact with it through
motor outputs. The work of this thesis concerns how the brain selects actions
given the information about the perceived state of the world and how it learns
and adapts these selections to changes in this environment. This learning is
believed to depend on the outcome of the performed actions in the form of
reward and punishment. Reinforcement learning theories suggest that an action will be more or less likely to be selected if the outcome has been better
or worse than expected. A group of subcortical structures, the basal ganglia
(BG), is critically involved in both the selection and the reward prediction.
We developed and investigated two computational models of the BG. They
feature the two pathways prominently involved in action selection, one promoting, D1, and the other suppressing, D2, specific actions, along with a reward
prediction pathway. The first model is an abstract implementation that enabled
us to test how various configurations of its pathways impacted the performance
in several reinforcement learning and conditioning tasks. The second one was
a more biologically plausible version with spiking neurons, and it allowed us to
simulate lesions in the different pathways and to assess how they affect learning and selection. Both models implemented a Bayesian-Hebbian learning
rule, which computes the weights between two units based on the probability
of their activations and co-activations. Additionally the learning rate depended
on the reward prediction error, the difference between the actual reward and
its predicted value, as has been reported in biology and linked to the phasic
release of dopamine in the brain.
We observed that the evolution of the weights and the performance of
the models resembled qualitatively experimental data. There was no unique
best way to configure the abstract BG model to handle well all the learning
paradigms tested. This indicates that an agent could dynamically configure its
action selection mode, mainly by including or not the reward prediction values
in the selection process.
With the spiking model it was possible to better relate results of our simulations to available biological data. We present hypotheses on possible biological
substrates for the reward prediction pathway. We base these on the functional
requirements for successful learning and on an analysis of the experimental
data. We further simulate a loss of dopaminergic neurons similar to that re-
ported in Parkinson’s disease. Our results challenge the prevailing hypothesis
about the cause of the associated motor symptoms. We suggest that these are
dominated by an impairment of the D1 pathway, while the D2 pathway seems
to remain functional.
Sammanfattning
Vi uppfattar omgivningen via våra sinnen och interagerar med den genom vårt
motoriska beteende. Denna avhandling behandlar hur hjärnan väljer handlingar utifrån information om det upplevda tillståndet i omvärlden och hur den
lär sig att anpassa dessa val till förändringar i den omgivande miljön. Detta
lärande antas bero på resultatet av de genomförda åtgärderna i form av belöning och bestraffning. Teorier om förstärkninginlärnings (”reinforcement learning”) hävdar att en åtgärd kommer att vara mer eller mindre sannolik att väljas
om resultatet tidigare har varit bättre respektive sämre än väntat. En grupp av
subkortikala strukturer, de basala ganglierna (BG), är kritiskt involverad i både
urval och förutsägelse om belöning.
Vi utvecklade och undersökte två beräkningsmodeller av BG. Dessa har två
nervbanor som är kritiskt involverade i val av beteende, en som specifikt befrämjar (D1) och den andra som undertrycker (D2) beteende, tillsammans med
en som är viktig för förutsägelse av belöning. Den första modellen är en abstrakt implementation som gjorde det möjligt för oss att testa hur olika konfigurationer av dessa nervbanor påverkade resultatet i förstärkningsinlärning och
betingningsuppgifter. Den andra var en mer biologiskt detaljerad version med
spikande nervceller, vilken tillät oss att simulera skador i olika nervbanor samt
att bedöma hur dessa påverkar inlärning och beteendeval. Båda modellerna implementerades med en Bayes-Hebbiansk inlärningsregel som beräknar vikter
mellan två enheter baserade på sannolikheten för deras aktiveringar och coaktiveringar. Dessutom modulerades inlärningshastigheten beroende på felet i
förutsägelse av belöning, dvs skillnaden mellan den verkliga belöningen och
dess förutsagda värde, vilket har kopplats till fasisk frisättning av dopamin i
hjärnan.
Vi observerade att utvecklingen av vikterna och även modellernas funktion
kvalitativt liknade experimentella data. Det fanns inget unikt bästa sätt att konfigurera den abstrakta BG-modellen för att på ett bra sätt hantera alla testade
inlärningsparadigm. Detta tyder på att en agent dynamiskt kan konfigurera
sitt sätt att göra beteendeselektion, främst genom att väga in den förutsagda
belöningen i belslutsprocessen eller att inte göra det.
Med den spikande modellen var det möjligt att bättre relatera resultaten
av våra simuleringar till biologiska data. Vi presenterar hypoteser om möjliga
biologiska substrat för mekanismerna för belöningsförutsägelse. Vi baserar
dessa på dels på de funktionella kraven på framgångsrik inlärning och dels
på en analys av experimentella data. Vi simulerar också effekterna av förlust
av dopaminerga neuroner liknande den som rapporteras i Parkinsons sjukdom.
Våra resultat utmanar den rådande hypotesen om orsaken bakom de associerade motoriska symtomen. Vi föreslår att effekterna domineras av en nedreglering av D1 inflytandet, medan D2 effekten verkar vara intakt.
Acknowledgements
I would like to first thank my supervisor Anders, who always had time to discuss all the aspects of the works during these years, for the feedback and support. I also wish to thank Jeanette for providing valuable insights and new
angles to my research. I appreciated the basal ganglia meetings we had with
Micke, Iman, and Örjan who furthermore, and along with Erik, took care to
explain all the aspects of the Ph.D. studies. To Tony, Arvind and all the faculty
members at CB, you are sources of inspiration.
I additionally give special thank to Paweł, always rising spirits with infallible support, to Bernhard, who showed me many coding tips and was a
great travel companion, along with Phil, who helped me with the NEST module. Simon, Mr Lundqvist, Marcus, Cristina, Henrike, David, Peter, Pradeep
and everyone else at CB and SBI, thank you for the stimulating and enjoyable
atmosphere.
I am deeply thankful toward the European Union and the Marie Curie Initial Training Network program, for the great opportunity it has been to be part
of this interdisciplinary training and wonderful experience. It was truly a privilege, and I look forward to meeting again everyone involved, Vasilis, Tahir,
Radoslav, Mina, Marc-Olivier, Marco, Love, Johannes, Jing, Javier, Giacomo,
Gerald, Friedemann, Filippo, Diego, Carlos, Alejandro, Ajith and Björn. Similar acknowledgements to the organizers and participants of the various summer schools I attended, I have been lucky to study with dedicated teachers and
cheerful fellow students, and I hope we will come across each other again. I
especially tip my headphones to the IBRO for actively, and generously, fostering and promoting collaborations between future scientists from all over the
world.
Harriett, Linda and the administrative staff at KTH and SU, you have my
sincere gratitude for all the help and support you provided. This work would
not have been possible without PDC and their supercomputers Lindgren, Milner and Beskow.
I am immensely grateful to Laure, whose support and magic have made
this journey into science, Sweden, and life, such a fantastic experience. I also
want to thank my parents for having backed me all those years. Salutations
and esteem to all my friends who keep me going forward, and special honors
to the Savoyards.
To my parents, family, and friends
Contents
Abstract
iv
Sammanfattning
vi
Acknowledgements
viii
List of Papers
xiv
List of Figures
xv
Abbreviations
xvi
1
Introduction
1.1 Aim of the thesis . . . . . . . . . . . . . . . . . . . . . . . .
1.2 Thesis overview . . . . . . . . . . . . . . . . . . . . . . . . .
17
18
18
2
Theoretical Framework
2.1 Connectionism / Artificial Neural Networks
2.2 Learning . . . . . . . . . . . . . . . . . . .
2.2.1 Supervised Learning . . . . . . . .
2.2.2 Reinforcement Learning . . . . . .
2.2.3 Unsupervised Learning . . . . . . .
2.2.4 Associative Learning . . . . . . . .
2.2.4.1 Classical conditioning . .
2.2.4.2 Operant conditioning . .
2.2.4.3 Conditioning phenomena
2.2.5 Standard models of learning . . . .
2.2.5.1 Backpropagation . . . . .
2.2.5.2 Hebb’s rule . . . . . . . .
2.3 Models of Reinforcement Learning . . . . .
2.3.1 Model-based and model-free . . . .
2.3.2 Rescorla-Wagner . . . . . . . . . .
19
19
20
21
21
22
22
22
23
23
24
24
25
25
26
26
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
2.3.3
3
4
Action value algorithms . . . . . . . .
2.3.3.1 Temporal difference learning
2.3.3.2 Q-learning . . . . . . . . . .
2.3.3.3 Actor-Critic . . . . . . . . .
2.3.3.4 Eligibility trace . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
27
28
28
29
30
Biological background
3.1 Neuroscience overview . . . . . . . . . . . . . . . . . . .
3.1.1 Neuronal and synaptic properties . . . . . . . . . .
3.1.2 Neural coding . . . . . . . . . . . . . . . . . . . .
3.1.3 Local and distributed representations . . . . . . .
3.1.4 Organization and functions of the mammalian brain
3.1.5 Experimental techniques . . . . . . . . . . . . . .
3.2 Plasticity . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2.1 Short-term plasticity . . . . . . . . . . . . . . . .
3.2.2 Long-term plasticity . . . . . . . . . . . . . . . .
3.2.3 Homeostasis . . . . . . . . . . . . . . . . . . . .
3.2.4 STDP . . . . . . . . . . . . . . . . . . . . . . . .
3.3 Basal ganglia . . . . . . . . . . . . . . . . . . . . . . . .
3.3.1 Striatum . . . . . . . . . . . . . . . . . . . . . . .
3.3.1.1 Inputs . . . . . . . . . . . . . . . . . .
3.3.1.2 Ventro-dorsal distinction . . . . . . . .
3.3.1.3 Reward prediction . . . . . . . . . . . .
3.3.1.4 Interneurons . . . . . . . . . . . . . . .
3.3.2 Other nuclei and functional pathways . . . . . . .
3.3.3 Dopaminergic nuclei . . . . . . . . . . . . . . . .
3.3.4 Dopamine and synaptic plasticity . . . . . . . . .
3.3.5 Habit learning and addiction . . . . . . . . . . . .
3.4 BG-related diseases . . . . . . . . . . . . . . . . . . . . .
3.4.1 Parkinson’s disease . . . . . . . . . . . . . . . . .
3.4.2 Huntington’s disease . . . . . . . . . . . . . . . .
3.4.3 Schizophrenia . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
33
33
33
35
37
37
39
40
41
41
42
42
43
44
47
48
49
51
52
56
59
64
67
67
70
70
Methods and models
4.1 Computational modeling . . . .
4.1.1 Top-down and bottom-up
4.1.2 Simulations . . . . . . .
4.1.2.1 Neuron model
4.1.2.2 NEST . . . .
4.1.3 Neuromorphic Hardware
4.2 Relevant computational models .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
73
73
74
74
75
75
76
77
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
77
79
82
83
83
85
86
93
94
94
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
97
97
97
103
103
104
106
106
109
109
113
118
119
120
123
127
Summary and Conclusion
6.1 Outlook . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.2 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.3 Original Contributions . . . . . . . . . . . . . . . . . . . . .
131
132
133
133
4.3
4.4
5
6
4.2.1 Models of synaptic plasticity . . .
4.2.2 Computational models of the BG
Bayesian framework . . . . . . . . . . .
4.3.1 Probability . . . . . . . . . . . .
4.3.2 Bayesian inference . . . . . . . .
4.3.3 Shannon’s information . . . . . .
4.3.4 BCPNN . . . . . . . . . . . . . .
Learning paradigms used . . . . . . . . .
4.4.1 Common procedures . . . . . . .
4.4.2 Delayed reward . . . . . . . . . .
Results and Discussion
5.1 Implementation of our models of the BG
5.1.1 Architecture of the models . . .
5.1.2 Trial timeline . . . . . . . . . .
5.1.3 Summary paper I . . . . . . . .
5.1.4 Summary paper II . . . . . . .
5.1.5 Summary paper III . . . . . . .
5.1.6 General comments . . . . . . .
5.2 Functional pathways . . . . . . . . . .
5.2.1 Direct and indirect pathways . .
5.2.2 RP and RPE . . . . . . . . . .
5.2.3 Lateral inhibition . . . . . . . .
5.2.4 Efference copy . . . . . . . . .
5.3 Habit formation . . . . . . . . . . . . .
5.4 Delayed reward . . . . . . . . . . . . .
5.5 Parkinson’s Disease . . . . . . . . . . .
References
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
cxxxv
List of Papers
The following papers, referred to in the text by their Roman numerals, are
included in this thesis.
PAPER I: Action selection performance of a reconfigurable basal ganglia inspired model with Hebbian-Bayesian Go-NoGo connectivity
Berthet, P., Hellgren-Kotaleski, J., & Lansner, A. (2012). Frontiers in Behavioral Neuroscience, 6.
DOI: 10.3389/fnbeh.2012.00065
My contributions were to implement the model, to design and
perform the experiments, to analyze the data and to write the
paper.
PAPER II: Optogenetic Stimulation in a Computational Model of the
Basal Ganglia Biases Action Selection and Reward Prediction Error
Berthet, P., & Lansner, A. (2014). PLOS ONE, 9, 3.
DOI: 10.1371/journal.pone.0090578
My contributions were to conceive, to design and to perform the
experiments, to analyze the data and to write the paper.
PAPER III: Functional relevance of different basal ganglia pathways investigated in a spiking model with reward dependent plasticity
Berthet, P., Lindahl, M., Tully, P. J., Hellgren-Kotaleski, J. &
Lansner, A. Submitted
My contributions were to implement and to tune the model, to
conceive, to design and to perform the experiments, to analyze
the data and to write the paper.
Reprints were made with permission from the publishers.
List of Figures
2.1
2.2
2.3
Reinforcement learning models . . . . . . . . . . . . . . . . .
Actor-Critic architecture . . . . . . . . . . . . . . . . . . . .
Eligibility trace . . . . . . . . . . . . . . . . . . . . . . . . .
26
30
32
3.1
3.2
Simplified representation of the principal connections of BG .
Activity of dopaminergic neurons in a conditioning task . . . .
45
62
4.1
4.2
Evolution of BCPNN traces in a toy example . . . . . . . . .
Schematic representation of a possible mapping onto biology
of the BCPNN weights . . . . . . . . . . . . . . . . . . . . .
92
Schematic representation of the model with respect to biology
Schematic representation of the RP setup . . . . . . . . . . .
Raster plof of the spiking network during a change of block . .
Weights and performance of the abstract and spiking models .
Box plot of the mean success ratio of various conditions of the
spiking model . . . . . . . . . . . . . . . . . . . . . . . . . .
Evolution of the weights and selection of the habit pathway . .
Raster plot of the network in a delayed reward learning task . .
Performance of the model in a delayed reward learning task . .
Evolution of the weights in the D1, D2 and RP pathways in
simulations of PD degeneration of dopaminergic neurons . . .
99
102
105
107
5.1
5.2
5.3
5.4
5.5
5.6
5.7
5.8
5.9
93
112
122
124
126
129
LIF
leaky integrate and fire
LTD
long-term depression
LTP
long-term potentiation
MAP
maximum a posteriori
MEG
magnetoencephalography
MSN
medium spiny neuron
attention deficit hyperactivity disorder
NEST
neural simulation tool
OFC
orbitofrontal cortex
AI
artificial intelligence
PD
Parkinson’s disease
BCM
Bienenstock, Cooper &
Munro
PFC
prefrontal cortex
PyNN
python neural networks
BCPNN
Bayesian
confidence
propagation neural network
RP
reward prediction
RPE
reward prediction error
BG
basal ganglia
SARSA
CR
conditioned response
state-action-rewardstate-action
CS
conditioned stimulus
SN
substantia nigra
DBS
deep brain stimulation
SNc
substantia
compacta
nigra
pars
EEG
electroencephalogram
SNr
pars
exponentially weighted
moving averages
substantia
reticula
nigra
EWMA
STDP
fMRI
functional magnetic resonance imaging
spike-timing-dependent
plasticity
STN
subthalamic nucleus
GP
globus pallidus
TD
temporal difference
GPe
external globus pallidus
UR
unconditioned response
GPi
internal globus pallidus
US
unconditioned stimulus
HMF
hybrid multiscale facility
VTA
ventral tegmental area
WTA
winner takes all
LH
lateral habenula
Abbreviations
ADHD
1. Introduction
Understanding the brain is a challenge like no other, with possible major impacts on society and human identity. True artificial intelligence (AI) could
indeed render any human work unnecessary. Computational neuroscience has
a great role to play in the realisation of such AI. It is a challenge as well for society and ethics, as it needs to be decided how this knowledge can be used, and
how far the society is willing to change, in the face of the coming discoveries.
The brain, and especially the human brain, is a complex machinery, with a
very large number of interdependent dynamical systems, at different levels. It
is suggested that the evolutionary reason for the brain is to produce adaptable
and complex movements. The human brain, and its disproportionally large
neocortex, seems to be capable of much more, but some argue that it all comes
down to enriching the information that is going to be used to perform a movement, be it planning, fine tuning, estimating the outcome, or even building a
better representation of the world in order to compute the best motor response
possible in that environment. One thing seems certain, there is only trough
motor output that one can interact on and influence the environment (Wolpert
et al., 1995). It has furthermore been proposed that the functional role of consciousness could revolve around integration for action (Merker, 2007).
If the brain is not yet understood at a degree which enables the simulation
of such a true AI, the crude functional roles of subparts of this complex system
appear however to be roughly fathomed. The development of new techniques
of investigation and of data collection expands the biological description of
such systems, but may fall short of offering non-trivial explanations or relevant
hypotheses about these observations. This is precisely where computational
modeling can be used, and it shows the need for some theoretical framework,
or top-down approaches, to be able to build a model of all the available data.
The interdependent relationship between theoretical works and experimental
observations is the engine which will carry us on the path towards a better
understanding of the brain and to its artificial implementation.
Our perception of the world rarely matches physical reality. This can boils
down to the fact that our percepts can be biased towards our prior beliefs,
which are based on our previous experience. Learning can thus be considered
as the update of the beliefs with new data, e.g. the outcome of an event.
The basal ganglia (BG) are a group of subcortical structures which inte17
grate the multi-modal sensory inputs with cognitive and motor signals in order
to select the action deemed the most appropriate. The relevance of the action
is believed to be based on the expected outcome of this action. The BG are
found in all vertebrates and are supposed to learn to select the actions through
reinforcement learning, that is that the system receives information about the
outcome of the action performed, i.e. a positive or a negative reward, and this
action will be more or less likely to be selected again in the similar situation if
the outcome has been better or worse than expected, respectively.
1.1
Aim of the thesis
In this thesis, we will present and use a model of learning which basically relies
on the idea that neurons and neural networks can compute the probabilities of
these events and their relations. The aim of the thesis is to investigate if action
selection can be learned based on computation derived from Bayesian probabilities through the development of computational models of the BG which use
reinforcement learning. Another goal is to study the functional contributions
of the different pathways and characteristics of the BG on the learning performance via simulated lesions in our models, and notably a neurodegeneration
observed in patients with Parkinson’s disease. This should lead to the development of new hypotheses about the biological substrate for such computations
and also to better determine the reason behind the architecture and dynamics
of these pathways.
1.2
Thesis overview
As it is often the case, it is by trying to build a copy of a complex system that
one unravels requirements that might have been overlooked by a pure descriptive approach, that one stumbles upon various ways to obtain a similar result,
and is thus faced with the task to assess these different options and their consequences. This thesis does not pretend to cover all aspects of learning, of the
neuroscience of the basal ganglia, or of all the related models. The first part
should provide the necessary background to understand the work presented,
and some more to grasp the future and related challenges. We will start by
presenting the theoretical framework used to model learning. We will then
consider the biology involved and will detail the various levels and structures
at work and their interdependencies. The framework for our model and learning rule will then be introduced, as well as some relevant other computational
models. We will then describe our models and discuss some of our main results, and we will comment on the relation between these different results.
18
2. Theoretical Framework
Marr (1982) described different levels of analysis in order to understand information processing systems: 1. the computational level, what does the system
do, and why? 2. the algorithmic or representational level, how does it do it?
3. the physical implementation level, what biological substrates are involved?
In the 2010 edition of the book, Poggio added a fourth level, above the others:
learning, in order to build intelligent systems. We will briefly present the theory of connectionism and artificial neural networks before giving an overview
of what is one of these networks most interesting features: learning, and its
different procedures.
2.1
Connectionism / Artificial Neural Networks
Connectionism is a theory commonly considered to have been formulated by
Donald O. Hebb in 1949, where complex cognitive functions are supposed
to emerge from the interconnection of simple units performing locally basic
computations (Hebb, 1949) (but see Walker (1992) for some history about
this theory). This idea still serves today as the foundation of most of computational theories and models of the brain and of its capabilities. Hebb also
suggested another seminal theory, about the development of the strength of the
connections between neurons, which would depend on their activity (see section 2.2.5.2 for a description). These interconnected units form what is called
an (artificial) neural network and the architecture, as well as the unit properties,
can vary depending on the model. In this work, the units represent neurons, or
functional populations of neurons, and we will thus use the same term to refer
to biological and computational neurons. Similarly, the connections represent
synapses and learning occurs as the modification of these synapses, or changes
of their weights. The activation function of a neuron can be linear or nonlinear,
and among the latter, it can be made to mimic a biological neuron response.
This function determines the activation of the neuron given its input, which
is the sum of the activity received through all its incoming connections, in a
given time window, time interval, or step. The response of the network can be
obtained by accessing the activation levels of the neurons considered, as read
out.
19
The Perceptron is one of the first artificial neural network, and is based on
the visual system (Rosenblatt, 1958). It is a single layer network where the
input, representing visual information for example, is fed to all neurons of the
output layer, possibly coding for a motor response, through the weights of the
connections. Depending on the strength of the connections, where a synaptic weight has to be defined, different inputs trigger different output result.
The flow of information is here unidirectional: feedforward. Furthermore, this
network can learn, that is, the strength of the connections can be updated to
modify the output for a given input. The delta rule is one of the commonly
used learning rule, where the goal is to minimize the error of the output in
comparison with a provided target output, through gradient descent (section
2.2.5.1). A logical evolution is the multilayer Perceptron, which is also feedforward and has all-to-all connections between layers. This evolution is able
to learn to distinguish non-linearly separable data, unlike the regular Perceptron. The propagation of the signal occurs in parallel via the different units
and connections. Moreover, the use of the delta-rule can be refined as it is now
possible to apply it not only to the weights of the output layer, but also to those
of the previous layers, through backpropagation.
Other types of neural network can additionally contain recurrent, or feedback, connections. Of primary interest is the Hopfield network, which is defined by symmetric connections between units (Hopfield, 1982). It is guaranteed to converge to a local minimum, an attractor, and is quite robust to input
distortions and node deletions. It is a distributed model of an associative memory so that, once a pattern has been trained, the presentation of a sub-sample
should lead to the complete recollection of the original pattern, a process called
pattern completion. Different learning rules can be used to store information
in Hopfield networks, the Hebbian learning rule being one of them, where
associations are being learned based on the inherent statistics of the input (section 2.2.5.2). A Boltzmann machine is also a recurrent neural network, and is
similar to a Hopfield network with the difference that its units are stochastic,
thus offering an alternative interpretation of the dynamics of network models
(see Dayan & Abbott (2001) for a formal description of the various network
models). Of relevance in this work are spiking neural networks, which we use
in the works presented here, where the timing of the occurrence of the events
plays a critical role in the computations.
2.2
Learning
Learning is the capacity to take into account information in order to create new,
or to modify existing, constructions about the world. It has been observed from
the simplest organism to the most evolved ones (Squire, 1987). The ability to
20
remember causal relationship between events, and to be able to predict and to
anticipate an effect, procures an obvious advantage in all species (Bi & Poo,
2001). Learning is usually gradual and is shaped by previous knowledge. It can
be of several types and can occur through different processes. We will detail
the most relevant forms of learning in this section, as well as models developed
to account for them. Different structures of the brain have been associated with
these learning methods. Cerebellum is supposed to take advantage of supervised learning, whereas the cortex would mostly use unsupervised learning,
and reinforcement learning would be the main process occurring in the BG
(Doya, 1999, 2000a).
2.2.1
Supervised Learning
In supervised learning, the algorithm is given a set of training examples along
with the correct result for each of them. The goal is for the classifier to, at
least, learn and remember the correct answers even when the supervisor has
been removed, but more importantly, to be able to generalise to unseen data.
It can be thought of as a teacher and a student, first the teacher guides the
student through some example exercises all the way to the solution. Then the
student has to get the correct answer without the help of the teacher. Finally,
the goal is for the student to find solutions to unseen problems. The efficacy of
this method relies obviously on the quality of the training samples and on the
presence of noise in the testing set, notably for neural networks. Multilayer
Perceptrons use supervised learning through a backpropagation of the error.
2.2.2
Reinforcement Learning
In this type of learning, which can be seen as intermediate between supervised
and unsupervised, the algorithm is never given the correct response. Instead,
it only receives a feedback, i.e. information that it has produced a good or
a bad solution. With that knowledge only, it has, through trial and error, to
discover the optimal solution, that is, the one that will maximize the positive
reward given the environment (Kaelbling et al., 1996). It is assumed that the
value of the reward impacts the weights update accordingly. A reinforcement
learning algorithm is often encapsulated in an ‘agent’ and the setting the agent
finds itself in is called the environment of the agent. The agent can perceive
the environment through sensors and has a range of possibilities to act on it. A
refinement of this approach is to implement a reward prediction (RP) system,
which enables the agent to compute the expected reward in order to compare
it to the actual reward. Using this difference between the expected reward
value and the actual reward, the reward prediction error (RPE), instead of the
raw reward signal improves both the performance in learning, especially when
21
the reward schedule changes, and the stability of the system in a stationary
environment. Indeed, once the reward is fully predicted, RPE = 0, there is no
need to undergo any modifications.
2.2.3
Unsupervised Learning
Here, it is up to the algorithm to find a valuable output, as only inputs are
provided, without any correct example, or additional help or information about
what is expected. It thus needs to find any significant structure in the data in
order to return useful or relevant information. This obviously assumes that
there is some statistical structure in the data. The network self-organizes itself
based on its connections, dynamics, plasticity rule and the input. The goal of
this method is usually to produce a representation of the input in a reduced
dimensionality. As such, unsupervised learning can share common properties
with associative learning.
2.2.4
Associative Learning
As we have mentioned, associative learning extracts the statistical properties
of the data. There are two forms: classical and operant. However, these two
types of conditioning, and especially the operant one, can be viewed as leaning
on the reinforcement learning approach as unconditioned stimuli might represent a reward by themselves, or can even be plain reinforcers. Both methods
produce a conditioned response (CR), similar to the unconditioned response
(UR), to occur at the time of a conditioned stimulus (CS), in anticipation of
the unconditioned stimulus (US) to come. The difference is that the delivery
of the US does not depend on the actions of the subject in classical conditioning, whereas it does in operant conditioning. The basic idea is that an event
becomes a predictor of a subsequent event, resulting from the learning due to
the repetition of the pattern.
2.2.4.1
Classical conditioning
In 1927, Pavlov reported his observations on dogs. He noticed they began to
salivate abundantly, as when food was given to them, upon hearing the footsteps of the assistant bringing the food, but still unseen to the animals (Pavlov,
1927). He had the idea that some things are not learned, such as dogs salivating
when they see food. Thus, an US, here food, always triggers an UR, salivation. In his experiment, Pavlov associated the sound of a bell with the food
delivery. By itself, ringing the bell, the CS, is a neutral stimulus and does not
elicit any particular response. However, after a few associations, the dogs were
salivating at the sound of the bell. This response to the bell is thus called the
22
CR, a proof that the food is expected even though it has not yet been delivered.
Pavlov noted that if the CS was presented too long before the US, then the CR
was not acquired. Thus, temporal contiguity is required but is not sufficient.
The proportion of the CS-US presentations over those of the CS only is also
of importance (Rescorla, 1988), as we will detail it further in section 2.2.4.3.
It should also be noted that the conditioning could depend on the discrepancy
between the perceived environment and the subject’s a priori representation of
that state (Rescorla & Wagner, 1972), which should thus be taken into consideration. This form of conditioning became the basis of Behaviorism, a theory
already developed by Watson, focusing on the observable processes rather than
on the underlying modifications (Watson, 1913).
2.2.4.2
Operant conditioning
Skinner extended further the idea to modification of voluntary behavior, integrating reinforcers in the learning into what is known as operant conditioning
(Skinner, 1938). He believed that a reinforcement is fundamental to have a
specific behavior repeated. The value of the reinforcement drives the subject
to associate the positive or negative outcome with specific behaviors. It was
first studied by Thorndike, who noticed that behaviors followed by pleasant
rewards tend to be repeated whereas those producing obnoxious outcomes are
less likely to be repeated (Thorndike (1998), originally published in 1898).
This led to the publication of his law of effect.
This type of learning has also been called trial and error, or generate and
test, as the association is made between a sensory information and an action.
Based on this work, it has been suggested that internally generated goals, when
reached, could produce the same effect as an externally delivered positive reinforcements.
2.2.4.3
Conditioning phenomena
Conditioning effects depend on timing, reward value, statistics of associations
of individual stimuli and on the internal representations of the subject. We
here detail some of the most studied methods and phenomena, and most are
valid for both types of conditioning, the US being a reward in operant conditioning. It should be noted first that the standard temporal presentations are
noted as: delay, the US is given later but still while the CS is present ; trace,
the occurrence of the CS and of the US does not overlap ; and simultaneous,
both CS and US are delivered at the same time. Furthermore, multiple trials
are usually needed for the learning to be complete. The inter-stimulus interval
(ISI) between the onset of the CS and of the US is critical for the conditioning
performance.
23
We have already seen in section 2.2.4.1 how the standard acquisition is
made. Let us note that the acquisition is faster and stronger as the intensity of
the US increases (Seager et al., 2003). Secondary (n-ary) conditioning occurs
when the CR of a CS is used to pair a new CS to that response. Conditioning can occur when the US is delivered at regular intervals, both spatial and
temporal. If the CS is given after the US, the CR tends to be inhibitory. Extinction happens when the CS is not followed by the US, up to the point when the
CS does not produce the CR. This phenomenon is also remarked when neither
the US and the CS are presented for a long time. Recovery is the following
re-apparition of the CR. It can be achieved by re-associating the CS with the
US, and in that case reacquisition is usually faster than the initial acquisition
(Pavlov, 1927), or by reinstatement of the US even without the CS being presented. It can also result from spontaneous recovery. Without either the CS
or US being presented since the complete extinction, there is an interval of
time where a presentation of the CS will trigger, spontaneously, the CR. The
mechanisms of this phenomenon are still unclear (Rescorla, 2004). Blocking
is the absence of conditioning of a second stimulus, CS2, when presented simultaneously with a previously conditioned CS1. It has been suggested that
the predictive power of a CS1 prevents any association to be made with a CS2.
Latent inhibition refers to the slowed down acquisition of the CR when the
CS has been previously exposed without the US. It has been suggested to result from a failure in the retrieval of the normal CS-US association, or in its
formation (Schmajuk et al., 1996).
2.2.5
Standard models of learning
We will define a method commonly used for training neural networks, the
backpropagation algorithm, which we have mentioned in the previous section,
along with another widely implemented theory of synaptic plasticity (section
3.2), Hebb’s rule. We will detail more specifically reinforcement learning models in the next section (2.3).
2.2.5.1
Backpropagation
The delta-rule is a learning rule used to modify the weights of the inputs onto
a single layer artificial neural network. The goal is to minimise the error of
the output of the network through gradient descent. A simplified form of the
weight wi j can be formalised as:
∆wi j = α(t j − yi )xi
(2.1)
where t j is the target output, yi the actual output, xi is the ith input and α the
learning rate.
24
Backpropagation is a generalisation of the delta-rule for multi-layered feedforward networks. Its name comes from the backward propagation of the error
through the network once the output has been generated. Multiplying this error value with the input activation gives the gradient of the weight used for the
update.
2.2.5.2
Hebb’s rule
Donald O. Hebb postulated in his book The Organization of Behavior in 1949
(Hebb, 1949) that when a neuron is active jointly with another one to which
it is connected to, then the strength of this connection increases (see Brown
& Milner (2003) for some perspectives). This became known as Hebb’s rule.
Furthermore, he speculated that this dynamic could lead to the formation of
neuronal assemblies, reflecting the evolution of the temporal relation between
neurons.
Hebb’s rule is at the basis of associative learning and connectionism and
is an unsupervised process. For example, in a stimulus response association
training, neurons coding for these events will develop strong connections between them. Subsequent activations of those responsive to the stimulus will
be sufficient to trigger activity of those coding for the response. He suggested these modifications as basis of a memory formation and storage process. Hebb’s rule has been generalised to consider the case where a failure in
the presynaptic neuron to elicit a response in the postsynaptic a neuron would
cause a decrease in the connection strength between these two neurons. This
would enable to represent the correlation of activity between neurons, and to
be one of the basis of computational capabilities of neural networks. Hebb’s
theory has been experimentally confirmed many years later (Kelso et al., 1986)
(and see Brown et al. (1990) and Bi & Poo (2001) for reviews).
2.3
Models of Reinforcement Learning
We will present the various ways to look at the modeling approach and then
detail some of the relevant, basic models of learning (fig. 2.1). Central to most
of them is the prediction error, that is, the discrepancy between the estimated
outcome and its actual value. There have been several shifts of paradigms
over time, form Behaviorism, to Cognitivism and to Constructivism; theories
are proposed and predictions can be made. Confronted with experimental evidences, there might be a need for an evolution, for an update of these hypotheses. Which is exactly how learning is modeled today.
25
Figure 2.1: Schematic map of some of the models of learning. Reproduced from
Woergoetter & Porr (2008)
2.3.1
Model-based and model-free
Model-based and model-free strategies share the same primary goal, that is to
maximize the reward by improving a behavioural policy. Model-free ones only
assert and keep track of the associated reward for each state. This is computationally efficient but statistically suboptimal. A model-based approach builds a
representation of the world and keeps track of the different states and of the associated actions that lead to them. If one considers the current state as the root
node, then the search for the action to be selected is equivalent to a tree search,
and is therefore more computationally taxing than a model-free approach, but
it also yields better statistics. It is also commonly believed to be related to the
kind of representations the brain performs, especially when it comes to high
level cognition. However, there are suggestions that both types could be implemented in the brain using parallel circuits (Balleine et al., 2008; Daw et al.,
2005; Rangel et al., 2008). The following formalisations are all model-free
approaches.
2.3.2
Rescorla-Wagner
The Rescorla-Wagner rule, derived from the delta-rule, describes the change
in associative strength between the CS and the US during learning (Rescorla
26
& Wagner, 1972). This conditioning does not rely on the contiguity of the two
stimuli but mainly on the prediction of the co-occurrence. The variation of
the associative strength ∆VA resulting from a single presentation of the US is
limited by the sum of associative weights of all the CS present during the trial
Vall .
∆VA = αA β1 (λ1 −Vall )
(2.2)
Here λ1 is the maximum conditioning strength the US can produce, representing the upper limit of the learning. α and β represent the intensity, or salience,
of the CS and US, respectively, and are bounded in [0,1]. So, in a trial, the
difference between λ1 and Vall is treated as an error and the correction occurs by changing the associative strength VA accordingly. This model has a
great heuristic value and is able to account for some conditioning effects such
as blocking. Moreover, its straightforward use of the RPE made it very popular and triggered interests which have thus led to the developments of new
models. It however fails to reproduce experimental results of latent inhibition,
spontaneous recovery and when a novel stimulus is paired with a conditioned
inhibitor.
2.3.3
Action value algorithms
In this type of models, the aim of the agent is to learn, for each state, the action maximizing the reward. For every states exist subsequent states that can
be reached by means of actions. The value function estimates the sum of the
reward to come for a state, or a state-action pairing, instead of learning directly the policy. A policy is a rule that the agent obeys to in selecting the
action given the state it is in, and can be of different strictness. A simplistic
policy could be to always select the action associated with the highest value,
and is called a greedy policy. Other commonly used policies are the ε-greedy
and softmax selections. The ε-greedy policy selects the action with the highest value in a proportion of 1 − ε of the time, and a random action is selected
in a proportion ε. The softmax selection basically draws the action from a
distribution which depends on the action values (see section 2.3.3.3 for a formal description). Markov decision processes are similar in that the selection
depends on the current action value and not on the path of states and actions
taken to reach the current state, i.e. all relevant information for future computations is self-contained in the state value. V π (s) represents the value of state
s under policy π. Thus, Qπ (s, a) is the value of taking action a in state s under
policy π. This is referred to as the action value, or Q-value. The initial values
are set by the designer, and attributing high initial values, known as ‘optimistic
initial conditions’, biases the agent towards exploration. We will present three
approaches that can be used to learn these action values.
27
2.3.3.1
Temporal difference learning
The temporal difference (TD) method brings to classical reinforcement learning models the prediction of future rewards. It offers a conceptual change from
the evaluation and modification of associative strength to the computation of
predicted reward. In this model, the RPE is represented by the TD error (see
O’Doherty et al. (2003) for relations between the brain activity and TD model
computations). The TD method computes bootstrapped estimates of the sum
of future rewards, which vary as a function of the difference between successive predictions (Sutton, 1988). As the goal is to predict the future reward,
an insight of this method is to use the future prediction as training signal for
current or past predictions, instead of the reward itself. Learning still occurs
at each time steps, where the prediction made at the previous step is updated
depending on the prediction at the current step, with the temporal component
being the computation of the difference of the estimation of V π (s) at time t
and t + 1, defined by:
π
Vt+1
(st ) = Vtπ (st ) +
| {z }
old value
δt+1 = Rt+1 +
|{z}
reward
α
|{z}
δt+1
|{z}
(2.3)
learning rate TD error
γ
|{z}
π
Vt+1
(st+1 ) −Vtπ (st )
(2.4)
discount factor
with α > 0 and where δ is also called the effective reinforcement signal, or TD
error. A change in the values occurs only if there is some discrepancy between
the temporal estimations, otherwise, the values are left untouched.
2.3.3.2
Q-learning
Q-learning learns about the optimal policy regardless of the policy that is being followed and is also a TD, model-free, reinforcement learning algorithm.
Q-learning is thus called off-policy, meaning it will learn anyway the optimal
policy no matter what the agent does, as long as it explores the field of possibilities. If the environment is stochastic, Q-learning will need to sample each
action in every states an infinite number of times to fully average out the noise,
but in many cases the optimal policy is learned long before the action values
are highly accurate. If the environment is deterministic, it is optimal to set the
learning rate equal to 1. It is common to set an exploration-exploitation rule,
such as the previously mentioned softmax or ε-greedy, to optimize the balance
between exploration and exploitation. The update of the Q-values is defined
by:
28
Qt+1 (st , at ) = Qt (st , at ) + αt (st , at ) × δt+1
|{z}
| {z } | {z }
old value
learning rate
(2.5)
error signal
learned value
z
δt+1 = Rt+1 +
|{z}
reward
γ
|{z}
discount factor
}|
{
max Qt+1 (st+1 , a) −Qt (st , at )
a
{z
}
|
(2.6)
estimate of optimal future value
where Rt+1 is the reward obtained after having performed action at from state
st and with the learning rate 0 < αt (st , at ) ≤ 1 (it can be the same for all the
pairs). The learning rate determines how fast the new information impacts
the stored values. The discount factor γ sets the importance given to future
rewards, where a value close to 1 makes the agent strive for long-term large
reward, while 0 blinds it to the future and makes it consider only the current
reward.
A common variation of Q-learning is the SARSA algorithm, standing for
State-Action-Reward-State-Action. The difference lies in the way the future
reward is found, and thus in the value used for the update. In Q-learning, it
is the value of the most rewarding possible action in the new state, whereas in
SARSA, it is the actual value of the action taken in the new state. Therefore,
SARSA integrates the policy by which the agent selects its actions. Its mathematical formulation is thus the same as equation 2.5, but its error signal is
defined as:
δt+1 = Rt+1 + γQt+1 (st+1 , at+1 ) − Qt (st , at )
(2.7)
2.3.3.3
Actor-Critic
In the previous methods, the policy might depend on the value function. Actorcritic approaches, derived from TD learning, explicitly feature two separate
representations, schematised in fig. 2.2, of the policy, the actor, and of the
value function, the critic (Barto et al., 1983; Sutton & Barto, 1998). Typically,
the critic is a state-value function. Once the actor has selected an action, the
critic evaluates the new state and determines if things are better or worse than
expected. This evaluation is the TD error, as defined in equation 2.4. If the TD
error is positive, it means that more reward than expected was obtained, and
the action selected in the corresponding state should see its probability to be
selected again, given the same state, increased. A common method for this is
by using a softmax method in the selection:
πt (s, a) = Pr (at = a | st = s) =
e p(s,a)/ι
∑b e p(s,b)/ι
(2.8)
29
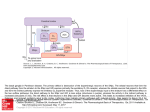
Figure 2.2: Representation of the Actor-Critic architecture. The environment
informs both the Critic and the Actor about the current state. The Actor selects an
action based on its policy whereas the Critic emits an estimation of the expected
return, based on the value function of the current state. The Critic is informed
about the outcome of the action performed on the environment, that, it knows
the actual reward obtained. It computes the difference with its estimation, the
TD error. This signal is then used by both the Actor and the Critic to update the
relevant values. Figure adapted from Sutton & Barto (1998)
where ι is the temperature parameter. For low value, the probability of selecting the action with the highest value tends to 1, where the probabilities of the
different actions tends to be equal for high temperature. p(s, a) is the preference value at time t of an action a when in state s. The increase, or decrease,
mentioned above, can thus be implemented by updating p(st , at ) with the error
signal, but other ways have been described. Both the critic and the actor get
updated based on the error signal, the critic adjusts its prediction to the obtained reward. This method has been widely used in models of the brain and
of the BG especially, and is commonly integrated in artificial neural networks
(Cohen & Frank, 2009; Joel et al., 2002).
2.3.3.4
Eligibility trace
A common enhancement of TD learning models is the implementation of an
eligibility trace, which can increase their performance, mostly by speeding up
learning. One way to look at it, is to consider it as a temporary trace, or record,
of the occurrence of an event, such as being in a state or the selected action (see
fig. 2.3 for a visual representation). It marks the event as eligible for learning,
and restricts the update to those states and actions, once the error signal is delivered (Sutton & Barto, 1998). These types of algorithm are denoted TD(λ ),
30
because of their use of the λ parameter determining how fast the traces decay.
It does not limit the update to the previous prediction, but to the recent earlier
ones as well, acting similarly to a short-term memory. Therefore, it speeds
up learning by updating the values of all the event which traces overlap with
the reward, effectively acting as an n-steps prediction, instead of updating only
the 1-step previous value. The traces decay during this interval and learning
is slower as the interval increases, until the overlap between the eligible values and the reward disappears, preventing any learning. This is similar to the
conditioning phenomena described in section 2.2.4.3, where temporal contiguity is required. This implementation is a primary mechanism of the temporal
credit assignment in TD learning. This relates to the situation when the reward
is delivered only at the end of a sequence of actions. How to determine which
action(s) has(ve) been relevant to attain the reward? From a theoretical point
of view, eligibility traces bridge the gap to Monte Carlo methods, where the
values for each state or each state-action pair is updated only based on the final
reward, and not on the estimated or actual values of the neighbouring states.
The eligibility trace for state s at time t is noted et (s) and its evolution at each
step can be described as:
γλ et−1 (s)
if s 6= st ;
et (s) =
γλ et−1 (s) + 1
if s = st ,
for all non-terminal states s. This example refers to the accumulating trace, but
a replacing trace has also been suggested. λ reflects the forward, theoretical
view, of the model, where it exponentially discounts past gradients. Implementation of the eligibility trace to the TD model detailed in equation 2.3 gives:
V π (st+1 ) = V π (st ) + αδt+1 et+1 (st )
(2.9)
We will now see in the next chapter the mechanisms of learning in biology,
and the structures involved. We will try to draw the links between the ideas
described here and the biological data before detailing the methods used in the
presented works.
31
Figure 2.3: Eligibility trace. Punctual events, bottom line (dashed bars), see their
associated eligibility traces increase with each occurrence, top line. However, a
decay, here exponential, drives them back with time to a value of zero (dashed
horizontal line).
32
3. Biological background
3.1
Neuroscience overview
It is estimated that the human skull packs 1011 neurons, and that each of them
makes an average of 104 synapses. Additionally, glial cells are found in an
even larger number as they provide support and functional modulation to neurons. There are indications that these cells might also play a role in information
processing (Barres, 2008). Moreover, there is also a rich system of blood vessels and ventricles irrigating the brain. The human brain consumes 20-25%
of the total energy used by the whole body, for approximately 2% of the total
mass.
We will first introduce neuronal properties as well as the organisation of
the brain into circuits and regions and their functional roles. We will also describe how learning occurs in such systems. We will then focus on the BG
by detailing some experimental data relevant to this work. Detailed sub-cellar
mechanisms are not in the focus of this work and we will cover only basics
of neuronal dynamics, as our interest resides mostly in population level computations (see Kandel et al. (2000) for a general overview of neuroscience).
Therefore, we will not only present biological data, but will also include the
associated hypotheses and theories about the functional implications of these
experimental observations; hypotheses which might have been produced in
computational neuroscience works.
3.1.1
Neuronal and synaptic properties
The general idea driving the study of the brain, of its structure, connections,
and dynamics, is that information is represented in, and processed by, networks of neurons. The brain holds a massively parallelized architecture, with
processes interoperating at various levels. As the elementary pieces of these
networks, neurons are cells that communicate with each other via electrical and
chemical signals. They receive information from other neurons via receptors,
and can themselves send a signal to different neurons through axon terminals.
Basically, the dendritic tree makes the receptive part of a neuron. Information
converge onto the soma and an electric impulse, an action potential, might be
triggered and sent through the axon, which can be several decimeters long.
33
The synapses at the axon terminal are the true outputs of neurons. Synapses
can release, and thus propagate to other nearby neurons, the neural message,
via the release of synaptic vesicles containing neurotransmitters. This is true
for most connections, but electrical signals can also be directly transmitted to
other neurons via gap junctions. The vast majority of the neurons are believed
to always send the same signal, that is, to deliver a unique neurotransmitter. It
must be noted that a few occurrences of what has been called bilingual neurons
have been reported, where these neurons are able to release both glutamate and
GABA (Root et al., 2014; Uchida, 2014). These two neurotransmitters are the
most commonly found in the mammalian brain, and are, respectively, of excitatory and inhibitory types. However, a neuron can receive different neurotransmitters, from different neurons. A neurotransmitter has to find a compatible
receptor on the postsynaptic neuron in order to trigger a response, which is a
cascade of subcellular events. In turn, these events could affect the generation
of action potentials of the postsynaptic neuron but could also lead to change in
the synaptic efficacy and have other neuromodulatory effects. Synaptic plasticity is a critical process in learning and memory. It represents the ability for
synapses to strengthen or weaken their relative transmission efficacy, and is
usually dependent on the activity of the pre- and postsynaptic neurons, but can
also be modulated by neuromodulators (section 3.2).
A common abstraction is to consider that neurons can be either active, i.e.
sending signals, or inactive, i.e. silent. The signal can be considered as unidirectional, and this allows to specify the presynaptic neuron as the sender, and
the postsynaptic neuron as the receiver. The activity is defined as the number
of times a neurons sends an action potential per second and can range from
very low firing rates, e.g. 0.1 Hz, to over 100 Hz. Essentially, a neuron emits
an action potential, also called a spike, if the difference in electric potential
between its interior and the exterior surpasses a certain threshold. The changes
in this membrane potential are triggered by the inputs the neuron receives: excitatory, inhibitory and modulatory. When the threshold is passed, a spike will
rush through the axon to deliver information to the postsynaptic neurons.
Neurons exhibit a great diversity of types and of firing patterns, from single spike to bursts with down and up states. They also display a wide range of
morphological differences. As we have mentioned, the signal they send can be
of excitatory or inhibitory nature, increasing and decreasing, respectively, the
likelihood of the postsynaptic neuron to fire. But this signal can also modulate
the effect that other neurotransmitters have, via the release of neuromodulators such as dopamine, and this can even produce long term effects. Returning
to the fact that neurons typically receive different types of connections from
different other types of neurons, along with the interdependency of the neurotransmitters, of which there are more than 100, the resulting dynamics can be
34
extremely complex.
The shape and the activation property of a neuron also play a critical role in
its functionality. Projection neurons usually display a small dendritic tree and a
comparably long single axon, and a similar polarity is usually observed among
neighbours. However, interneurons commonly exhibit dense connectivity on
both inputs and outputs, in a relatively restricted volume. The activation function represents the relationship between a neuron’s internal state and its spike
activity.
Neurons can have different response properties. For example it has been
shown that the firing rates of neurons in the hippocampus depend on the spatial
localisation of the animal, with only a restricted number of neurons showing
a high activity for a specific area of the field (Moser et al., 2008; O’Keefe &
Dostrovsky, 1971) or to the orientation, or speed, of a visual stimulus in the
primary visual cortex (Priebe & Ferster, 2012). We will detail a computational
model of neurons in section 4.1.2.
Even if there is a lot of support to the doctrine considering the neuron as the
structural and functional unit of the nervous system, there is now the belief that
ensemble of neurons, rather than individual ones, can form physiological units,
which can produce emergent functional properties (Yuste, 2015). Non-linear
selection, known as ‘winner-takes-all’ (WTA), through competition of populations sharing interneurons can be achieved. Inhibitory interneurons, which can
be involved via feed-forward, feed-back, or lateral connections, can also help
to reduce firing activity and to filter the signal, notably for temporal precision.
Noise, as a random intrinsic electrical fluctuations within neural networks,
is now considered to have a purpose and to serve computations instead of being
a simple byproduct of neuronal activity, e.g. stochastic molecular processes
(Allen & Stevens, 1994), thermal noise, ion channel noise (see Faisal et al.
(2008) and McDonnell et al. (2011) for reviews). It can, for example, affect
perceptual threshold or add variability in the responses (Soltoggio & Stanley,
2012).
3.1.2
Neural coding
Neural coding deals with the representation of information and its transmission
through networks, in terms of neural activity. In sensory layers, it mostly has
to do with the way a change of the environment, e.g. a new light source or a
sound, impacts the activity of the neural receptors, and how this information
is transmitted to downstream processing stages. It assumes that changes in
the spike activity of neurons should be correlated with modifications of the
stimulus. The complementary mechanism is neural decoding, which aims to
find what is going on in the world from neuronal spiking patterns.
35
The focus of many studies has been on the spike activity of neurons, spike
trains, as the underlying code of the representations. The neural response is
defined by the probability distribution of spike times as a function of the stimulus. Furthermore, at the single neuron level, the spike generation might be
independent of all the other spikes in the train. However, correlations between
spike times are also believed to convey information. Similarly, at the population level, the independent neuron hypothesis makes the analysis of population coding easier than if correlations between neurons have some informative
value. It requires to determine if the correlations between neurons bring any
additional information about a stimulus compared to what individual firing patterns already provide. Two possible strategies have been described regarding
the coding of the information by neurons. The first one considers the spike
code as time series of all-or-none events, such that only the mean spiking rate
carries meaningful information, e.g. the firing rate of a neuron would increase
with the intensity of the stimulus. The second one is based on the temporal
profile of the spike trains, where the precise spike timing is believed to carry
information (see (Dayan & Abbott, 2001) for detailed information on neural
coding).
Neurons are believed to encode both analog- and digital-like outputs, such
as for example, speed and a direction-switch, respectively (Li et al., 2014b).
Furthermore, synaptic diversity has been shown to allow for temporal coding
of correlated multisensory inputs by a single neurons (Chabrol et al., 2015).
This is believed to improve the sensory representation and to facilitate pattern
separation. It remains to determine what temporal resolution is required, as
precise timing could rely on the number of spikes within some time window,
thereby bridging the gap between the two coding processes. Additionally, evidences of first-spike times coding have been reported in the human somatosensory system and could account for quick behavioral responses believed to
be too rapid to be relying on firing rates estimate over time (VanRullen et al.,
2005).
The quality of a code is valued on its robustness against error and on the resource requirements for its transmission and computation (Mink et al., 1981).
In terms of transmission of information, two possible mechanisms to propagate spiking activity in neuronal networks have been described: asynchronous
high activity and synchronous low activity, producing oscillations (Hahn et al.,
2014; Kumar et al., 2010).
In summary, the various coding schemes here detailed could be all present
in the brain, from the early stage sensory layers to higher associative levels.
36
3.1.3
Local and distributed representations
Information can be represented by a specific and exclusive unit, be it a population or even a neuron, coding for a single concept, and would thus be called
local. The grandmother cell representation is an example of this, where studies have shown that different neurons responded exclusively to single, specific, stimuli or concepts, such as one’s grandmother or (and) famous people
(Quiroga, 2012; Quiroga et al., 2005). This implies that memory storage is
there limited by the number of available units, and that without redundancy,
a loss of the cell coding for the object would result in a specific loss of its
representation. The pending alternative is that neurons are part of a distributed
representation, a cell assembly, and are therefore involved in the coding of
multiple representations. According to recent findings, the brain uses sparse
distributed representations to process information, which makes it resilient to
single neuron failure and allows for pattern-completion (see Bowers (2009) for
a review).
3.1.4
Organization and functions of the mammalian brain
We here present a general view of relevant systems, and will focus more on the
BG in further sections. Progress and discoveries in this domain are tied with
pathophysiology and other investigations of cerebral injuries, linking functions
with biological substrate. For example, patients with damages to the left inferior frontal gyrus may suffer from aphasia. Another example is the patient
HM, who suffered a bilateral removal of his hippocampi and some of his medial temporal lobes, and had extremely severe anterograde amnesia (Squire,
2009).
The mammalian brain is made of several structures, spatially localised
and functionally different. It features two hemispheres, each one in charge
of the sensory inputs and motor outputs of the contralateral hemibody. They
are densely interconnected and the congregation made by these axons crossing
sides forms a tract called corpus callosum. Furthermore, the largest constituent
of the human brain is the cortex, but a number of subcortical structures are also
critical to all levels of cognition and behavior, such as: amygdala, thalamus,
hypothalamus, cerebellum and BG.
The neocortex is formed of several lobes, anatomically delimited by large
sulci. This gross classification also carries some functional relevance, with
the occipital lobe mostly involved in visual processing, the parietal lobe in
sensorimotor computations, the temporal lobe in memory and in the association of inputs from the other lobes and of language, and the frontal lobe in
advanced cognitive processes, e.g. attention, working memory, planning, and
reward-related functions. The neocortex is not critical for survival, and is in37
deed absent in non-mammals. It has phylogenetically evolved from the pallium, a three layered structure present in birds and reptiles. Its size has seen
a relatively recent increase to make up to two thirds of the human brain, thus
stressing the evolutionary advantage it provided. The cortex features an horizontal layered structure, with each of these six layers having a distribution
of neuronal cell types and connections. This structure also presents lateral,
or recurrent, connectivity, which has been shown to support bi-stability and
oscillatory activity (Shu et al., 2003).
A modular structure has additionally been described. Cortical columns,
hypercolumns and minicolumns consist of tightly inter-connected neurons, and
had traditionally been more seen as functional units than anatomical columns,
even though this architecture is found throughout cortex, supporting a nonrandom connectivity (Perin et al., 2011; Song et al., 2005; Yoshimura et al.,
2005). Furthermore, minicolumns have been shown to share similar inputs
and to be highly co-active (Mountcastle, 1997; Yoshimura et al., 2005). They
typically consist of a few tens of interconnected neurons, coding for a similar input or attribute. Hypercolumns comprise several minicolumns sharing
a common feedback inhibition. According to a popular theory, they cause a
competition among these minicolumns in order to force only one of them to
be active at a time. However, there are also abundant long range interactions
between minicolumn across different hypercolumns. Columns are embedded
within distributed networks (see Rockland (2010) for some details on macrocolumns).
Returning to the fact that specific brain structures can be critically involved
in certain functions, let us mention that hippocampus is critical in both shortand long-term memory and spatial navigation, where place cells and spatial
maps have been described (see Best et al. (2001); Moser et al. (2008) for
a review). Also, amygdala is central in emotions and fear (Cardinal et al.,
2002) while hypothalamus regulates homeostasis and overall mood. Cerebellum plays an important role in motor control, especially in timing, fine tuning
of movements and automatic or unconscious executions and is believed to benefit from supervised learning (Doya, 1999, 2000a). Thalamus serves as a hub
dispatching sensory and motor signals to and from cortex, as well as controlling subcortico-cortical communications. Finally, the BG are connected to all
the aforementioned structures and are believed to be essential in action selection and reinforcement learning. We will detail the anatomical and functional
properties of BG in section 3.3.
38
3.1.5
Experimental techniques
Experimental data do not yet provide exhaustive information about the brain.
However, there is already an immense amount of data about specific components and at various temporal and spatial scales. Apart from studying dead tissues, recording the electrical activity of neurons or of populations of neurons
is the most accessible signal to obtain, be it through invasive recording electrodes or with non-invasive electroencephalogram (EEG) sensors. Depending
on the object of interest, experimentalists can choose from various methods to
investigate and decode the neural activity. Commonly, these techniques can be
classified along a two dimensional representation: temporal and spatial resolution of the recordings.
In order to gain knowledge on a function of a neural object, for example
neurotransmitters, neuronal type or population, or region, it is useful to actively modify the dynamic of the system, in order to observe the response to
the controlled perturbation. Stimulation electrodes can, through the delivery
of electric current, trigger neurons in the vicinity to fire. Pharmacology can
be used to target neurons’ receptors, channels, transporters and enzymes and
is thus mostly of interest in the study of neurotransmitters actions, which can
impact from local cells to large areas (Raiteri, 2006). Similarly, the studies
of brain lesions also provides knowledge about the underlying functional organisation. Studies now usually involve advanced technology where both the
anatomy and some dynamics can be recorded. We will here mention some of
the most common ones, which are relevant for the next sections.
Electron microscopy and calcium imaging capabilities have improved with
two-photon techniques and confocal image analysis. For larger scales, light
microscopy and patch-clamp enable to record and to dynamically affect a neuron with electrical stimuli. At the population level, field potentials and multielectrode arrays can be used. A recent technique has gained a lot of fame, as
it enables to selectively activate or inhibit populations of neurons through the
genetic modification of their membranes in order to feature light sensitive ion
channels, so called optogenetics. The activity of the neurons can thereby be
controlled with flashes of light, contrary to electrodes which indiscriminately
affect all the cells in the nearby volume, and both can be performed in vivo (see
Lenz & Lobo (2013) for a review of studies investigating the BG mechanisms
with optogenetics, and Gerfen et al. (2013) for a characterisation of transgenic
mice used for the study of neuro-anatomical pathways between the BG and
the cerebral cortex). Studies of the connectome, that is of the physical wiring
of the nervous system (Chuhma et al., 2011; Oh et al., 2014), developmental biology (Rakic, 2002) and techniques such as CLARITY, enabling to see
through tissues (Lerner et al., 2015), all have the potential to bring extremely
39
valuable knowledge. At the systems and brain area level, functional magnetic
resonance imaging (fMRI) probably is the most common but its temporal resolution is in the order of a second. Similarly, magnetoencephalography (MEG),
can map brain activity. Finally, behavioural assessments give indications on
the functional impact of controlled modifications to the subject. Relatively
defined areas of the brain can be non-invasively activated or inhibited via transcranial magnetic stimulation. A common experimental setup in humans is
still EEG acquisition, capturing the electrical signals from the brain from electrodes placed on the skin of the head of patients. All these techniques are used
mostly to record the activity in response to a perturbation, and each can tell us
a part of the picture, as they all work at different temporal and spatial scales,
and can be very invasive. A large part of the data mentioned in this work come
from studies using one or more of: electron microscopy imaging, patch clamp
and electrode recordings, transgenic and optogenetics techniques, behavioural
works and pharmacology.
3.2
Plasticity
Neurons in the living brain can adapt in response to experience. It is believed
to be not only critical during development but also for adaptation and learning
during adulthood (Chalupa et al., 2011). It was suggested at the end of the
19th century that memories might be stored as an anatomical changes in the
strength and numbers of neuronal connections (Ramón Y Cajal, 1894). Plasticity corresponds to all the mechanisms that can lead to adaptation, on a time
scale ranging from milliseconds to years (see Citri & Malenka (2008) and Tetzlaff et al. (2012) for reviews). Synaptic plasticity refers to the different aspect
of use-dependent synaptic modifications (Kreutz & Sala, 2012). These modifications change the functional properties of the synapse. Synaptic plasticity is
commonly considered as the major process, but other intrinsic modifications
can also alter the integration of postsynaptic potentials. Disturbances in plasticity result in diseases affecting cognitives functions and behaviours, such as
in addiction, compulsive behaviours, learning and memory troubles e.g. in
Alzheimer’s disease, or even psychiatric disorders (Selkoe, 2002) (see section
3.4 and Berretta et al. (2008) for some overview of diseases related to dysfunctional synaptic plasticity).
Learning in biological systems occurs through the modification of the efficacy of the synaptic transmission of a signal between the pre- and postsynaptic
neurons. We have already mentioned Hebb’s rule which bases the changes on
the correlation and causality of the activity of the neurons (section 2.2.5.2).
There are data suggesting that a backpropagation of spikes occurs, mostly
in the dendritic part of the neuron. This is supposed to carry the information
40
about the activity of the postsynaptic neuron back to the presynaptic one, in
order to enable adaptation and changes to happen at the presynaptic part of the
synapse.
We will here present a brief overview of the mechanisms of plasticity. A
more specific description of the synaptic plasticity in the BG with a focus on
dopamine will be done in section 3.3.4 (see Gerfen & Surmeier (2011); Tritsch
& Sabatini (2012) for a review).
3.2.1
Short-term plasticity
Short-term plasticity, usually referred to as short-term adaptation describes the
mechanisms with which the response of a postsynaptic neuron evolves, mostly
in a monotonic fashion, depending on the activity of presynaptic neurons. Critically, this adaptation does not last in time, and the neuron exhibits a generic
response again after some time, on a timescale of some milliseconds to a few
minutes. The underlying mechanisms are believed to be synaptic processes,
such as depletion or augmentation of releasable vesicles of neurotransmitters,
and the resulting effects can be an increased or decreased synaptic transmission efficacy. Functionally, it is supposed to enable, for instance, the encoding
of a signal with a larger dynamic range (Pfister et al., 2010) and locking to the
stimulus (Brody & Korngreen, 2013). In the BG, both short-term depression
and short-term facilitation have been suggested to play an important role in
the activity of the network (Lindahl et al., 2013). Additionally, dopamine has
been shown to be involved in the modulation of short-term synaptic plasticity
at striatal inhibitory synapses (Tecuapetla et al., 2007).
3.2.2
Long-term plasticity
As opposed to short-term adaptation, the timescale of the effects of long-term
plasticity ranges from minutes to years. This is how more permanent memories are supposed to be formed, by synaptic modifications that can last for
an extended time, but which result from a few seconds of neuronal activity
(Nabavi et al., 2014). These modifications can, as for the short-term ones,
lead to a strengthening or a weakening of the synapses, long-term potentiation
(LTP) and long-term depression (LTD), respectively. Evidence of experiencedependent plasticity have been detailed, where boutons and dendritic spines
appear and disappear, along with synapse formation and elimination (see Holtmaat & Svoboda (2009) for a review). Hebbian and anti-Hebbian plasticity
have notably been reported at cortico-striatal synapses, and further seems to be
dopamine-dependent (Fino et al., 2005, 2008; Pawlak & Kerr, 2008; Reynolds
& Wickens, 2002; Shen et al., 2008). Recently, GABA has also been shown
41
to be able to reverse the polarity of synaptic plasticity from Hebbian to antiHebbian learning, and thereby LTP to LTD, and vice versa (Paille et al., 2013).
3.2.3
Homeostasis
Homeostasis is the property of keeping a constant internal balance independently of external changes. It could be obtained through modification of intrinsic excitability, synaptic potentiation, depression, depletion or augmentation (Song et al., 2000). Such mechanisms would prevent the neuron, and the
network (Maffei & Fontanini, 2009), to fall outside their dynamic range (see
Turrigiano (1999) for a review), which could otherwise result from, for example, the positive feedback loop associated with Hebbian learning. These long
term changes in synaptic strength require coordination with multiple synapses,
and possibly with other neuronal properties, to maintain the stability and functionality of neural circuits (Burrone & Murthy, 2003; Watt & Desai, 2010;
Zenke et al., 2013). Homeostatic mechanisms have notably been reported in
neurons in the striatum (Azdad et al., 2009; Fino et al., 2005) (see section 3.3.4
for more details).
3.2.4
STDP
The temporal information of a spike event has been suggested to be the mechanism underlying the causality relation, implying an asymmetrical form of Hebbian learning. Basically, two patterns can occur: either a presynaptic spike
happens consistently before the postsynaptic one, thereby leading to LTP of
the involved synapses, or conversely, it occurs after the postsynaptic spike,
triggering LTD. Such learning rule is called spike timing dependent plasticity
(STDP). This type of learning has been experimentally observed, and the temporal resolution of the pre- and postsynaptic spike pairing was shown to be in
the range of a few milliseconds, and to vary across synapses and brain regions
(Bell et al., 1997; Bi & Poo, 1998; Dan & Poo, 2004; Markram et al., 1997;
Sjöström et al., 2001). This precision allows the use of the learning rule in
temporal coding paradigms (spike timing patterns). STDP processes association between spikes in an unsupervised and temporally asymmetric Hebbian
way (for a review see Caporale & Dan (2008) and Feldman (2012)). Repeated
activation of the presynaptic neuron followed by the firing of the postsynaptic
one within a short temporal scale, milliseconds, leads to LTP of the synapse,
whereas the contrary triggers LTD. However, other factors were shown to be
also involved in the modulation of the synaptic plasticity, such as the rate
(Sjöström et al., 2001), the dendritic location (Froemke et al., 2005), the cell
and receptor types (Shen et al., 2008; Surmeier et al., 2007) and the presence of neuromodulators (Pawlak & Kerr, 2008; Reynolds & Wickens, 2002;
42
Shen et al., 2008). Bidirectional long-term plasticity has, for example, been
observed on both types of striatal interneurons, albeit with a cell-specificity
(Fino et al., 2008).
3.3
Basal ganglia
Contraria sunt complementa.
- Niels Bohr
The BG, which comprise several subcortical (forebrain) structures and
pathways, are found in all vertebrates and are evolutionarily well preserved
through this family (Pombal et al., 1997; Reiner et al., 1998; Stephenson-Jones
et al., 2011). We will here outline the structural and functional aspects of the
BG. We will start with the striatum, which is the entry nucleus of the BG and
we will then continue with the description of the downstream pathways and nuclei. We will then focus on the dopaminergic nuclei and the feedback they provide to the BG. We will then depict the major role that dopamine plays in the
BG and in learning. Even if we do not go into great details, we will mention,
in the following section, more than what is required to grasp the computational
models of this thesis in order to provide bases for developments.
The BG are commonly considered to be critical in action selection (DeLong, 1990; Graybiel, 1995, 2005; Mink, 1996; Redgrave et al., 1999). Specifically, it has been suggested that they could have evolved as a centralised selection device, specialised to resolve conflicts over access to limited motor
and cognitive resources (Redgrave et al., 1999). As this supposes, they might
not be restricted to motor command, but as most of the experimental studies
predominantly consider only motor responses, we will from here on primarily refer to the motor control aspects. Dysfunctions in the BG can cause a
number of symptoms, and are involved in several diseases such as Parkinson’s
and Huntington’s diseases, but also obsessive-compulsive disorders (see section 3.4 and Kreitzer & Malenka (2008) for an overview of the BG functions
and dysfunctions).
The classical view of the BG is that two parallel pathways, here noted
D1 or direct and D2 or indirect, exert opposing influences on, promoting or inhibiting respectively, motor outputs (Albin et al., 1989; Alexander & Crutcher,
1990; DeLong, 1990; Freeze et al., 2013; Nambu, 2008) (fig. 3.1). The striatum is believed to code action values (Kim et al., 2009; Lau & Glimcher, 2008;
Samejima et al., 2005), and to thereby act as the interface between the state
related information it gets as inputs and the motor command that should be selected upon this information. Critically, the cortico-striatal synapses are plastic. They are the substrate of the learning of the action selection and enable the
43
BG to adapt to changes in the environment and in the reward obtention.
A functional topology has been described in the BG: projections from the
direct and indirect pathways, originating from populations of neurons coding
for a similar action, converge to populations in the internal globus pallidus
(GPi) and in the substantia nigra pars reticula (SNr) coding for that same action (Alexander et al., 1986). The GPi/SNr are the output of the BG and they
gate the motor output through their connections to the thalamus, cortex, and
brainstem. Unlike the cortex, which features mostly excitatory glutamatergic
projection neurons, the BG rely mainly on inhibitory GABAergic projection
neurons. An additional pathway from the striatum to the dopaminergic nuclei
is supposed to be involved in the prediction of the reward. The feedback information from these dopaminergic nuclei to the striatum and cortex is believed
to be an important factor in the synaptic plasticity.
In order to offer some self-consistency within the following sections, we
felt that some overlap in the information concerning the connectivity was unavoidable, as outputs from a nucleus could be the inputs of another one.
3.3.1
Striatum
The striatum is the entry structure of the BG and can be divided in the caudate
nucleus and the putamen, forming the dorsal part, and the nucleus accumbens
as the ventral part. The striatum receives glutamatergic inputs from the cortex,
the thalamus and the limbic system (Bolam et al., 2000; Doig et al., 2010;
Gerfen, 1992; McGeorge & Faull, 1989; Parent, 1990; Smith et al., 2011),
dopaminergic inputs from neurons in the substantia nigra pars compacta (SNc)
and in the ventral tegmental area (VTA) (Ilango et al., 2014; Joel & Weiner,
2000), along with serotonergic and noradrenergic inputs from the raphe and
pedonculopontine nuclei (Wall et al., 2013).
The striatum is mostly composed (95%) of GABAergic medium spiny neurons (MSNs) along with different types of inhibitory interneurons (Chuhma
et al., 2011; Kemp & Powell, 1971). MSNs are believed to express either D1
or D2 dopamine receptors, equally distributed throughout the striatum (Gerfen, 1992). A strong lateral to medial gradient of D2 receptors has however
been noticed in rodents (Joyce et al., 1986). Inhibitory connections from these
MSNs target either the output nuclei of the BG: the GPi and the SNr, making
the direct pathway (also called D1 pathway), or the external globus pallidus
(GPe) which in turns sends inhibitory connections to the subthalamic nucleus
(STN), itself projecting excitatory connections to the same output nuclei as
the direct pathway, the GPi/SNr, making the indirect pathway (D2 pathway)
(Chuhma et al., 2011; Gerfen et al., 1990; Parent & Hazrati, 1995; Surmeier
et al., 1997). However, MSNs expressing both receptors have been reported
44
Figure 3.1: Simplified diagram of the principal connections of the basal ganglia.
They consist of the striatum, GPe, GPi, SNr, SNc and STN. Prominent projections are represented, while some of the connections described in the text are
missing, for clarity.
PFC = prefrontal cortex, D1 / D2 = D1 / D2 medium spiny neurons, GPe = external globus pallidus, GPi = internal globus pallidus, STN = subthalamic nucleus,
SNr = substantia nigra pars reticula, SNc = substantia nigra pars compacta, LH =
lateral habenula, VTA = ventral tegmental area, RMTn = rostromedial tegmental
nucleus.
45
(Nicola et al., 2000; Surmeier et al., 1992) and a study has suggested that virtually all striatal projection neurons could contain dopamine receptors of both
classes (Aizman et al., 2000). Still, it was discussed that the contradictory
evidence from other studies (Gertler et al., 2008; Jaber et al., 1996; Surmeier
et al., 1997) could be reconciled with this result by assuming that MSNs of the
direct pathway contain a low level of D2 receptors compared to the D1 one,
and vice versa for those of the indirect pathway (Aizman et al., 2000).
A significant feature of MSNs is that their response has been shown to
code for actions. Specific optogenetic stimulations of D1 and D2 MSNs, in
vivo, lead to motor initiation and suppression respectively (Freeze et al., 2013;
Kravitz et al., 2010, 2012; Lenz & Lobo, 2013; Tai et al., 2012). Similar observations have been made through genetic deletion of key protein expression
in either D1 or D2 MSNs (Bateup et al., 2010; Durieux et al., 2009). Ablation
of D2 neurons in the ventral striatum of mice does not lead to enhanced motor
activity but increases the preference to conditioned stimuli, thereby suggesting a role for D2 MSNs in the reinforcement process (Durieux et al., 2009).
Stimulation of D2 MSNs does not seem to evoke a motor response, but instead
suppresses or decreases motor activity (Kravitz et al., 2010, 2012; Sippy et al.,
2015; Tai et al., 2012), thereby supporting the idea that the resulting global
or possibly focal inhibition of the GPi/SNr is not enough to trigger a motor
response.
Further distinctions of the MSNs can be made, based on their embryology
and morphology, their gene expression and furthermore on the topography of
their projections (Johnston et al., 1990; Joyce et al., 1986; Nakamura et al.,
2009). Striosomal compartments, ’islands’ embryologically older and also
termed patches in rodents, can notably be distinguished from the matrix ’sea’
by their differential expression of most neurotransmitter-related molecules in
the striatum (Crittenden & Graybiel, 2011; Graybiel, 1990; Johnston et al.,
1990; Nakamura et al., 2009; Newman et al., 2015). The ratio of 15% patch
to 85% matrix area is relatively constant in rats, rhesus monkeys and humans,
despite a 19-fold increase in the total striatal area from rat to human (Johnston
et al., 1990).
Neurons in the striatum do not form a layered or columnar structure, unlike
in the neocortex. However, the observed modular organisation could carry a
similar function (Graybiel & Ragsdale, 1978). The presence of different types
of inhibitory neurons and the modular organisation described fulfill similar
functional requirements to those of the columnar organization (Chuhma et al.,
2011; Szydlowski et al., 2013; Taverna et al., 2004, 2008). Dendrites from
striosomal neurons span the striosome compartment, whereas those of matrisomal neurons do not cross the patch/matrix border (Fujiyama et al., 2011).
We will now focus on the inputs to the MSNs, with respect to the various, and
46
mixed, classification we have just described.
3.3.1.1
Inputs
Cortical and thalamic terminals form synapses with both direct and indirect
pathway MSNs and, critically, are plastic (Doig et al., 2010) (see 3.3.4 for information on the synaptic plasticity at these synapses). These projections are
furthermore topographically organized and target both the patch and matrix
compartments (Crittenden & Graybiel, 2011; Gerfen, 1992; Graybiel et al.,
1987; Wiesendanger et al., 2004). Striosomes receive inputs from the limbic
system, the orbitofrontal and prefrontal cortex (OFC and PFC, respectively),
and from the insula (Crittenden & Graybiel, 2011; Eblen & Graybiel, 1995;
Friedman et al., 2015; Graybiel, 2008). Additionally, it has been reported
that the striosomes might be specifically avoided by sensori-motor projections,
which thus seem to only target the matrisomes (Crittenden & Graybiel, 2011;
Flaherty & Graybiell, 1993; Fujiyama et al., 2011). The latter thus receive
inputs from the motor cortex, somato-sensory areas and the parietal lobe, an
organisation which has been reported in rats, cats and monkeys (Flaherty &
Graybiell, 1993; Gerfen, 1984; Malach & Graybiel, 1986). Nevertheless, subregions of the striatum, containing both striosomes and matrisomes have been
reported to receive inputs from related cortical regions (Kincaid & Wilson,
1996). The two compartments can also be differentiated based on the layer
of the cerebral cortex from which they receive the most inputs: layer II/IIIVa for the matrix, and from deeper layer, Vb and VI, for striosomes (Gerfen,
1989, 1992; Kincaid & Wilson, 1996). MSNs of both the direct and indirect
pathway have been shown to respond to bilateral multimodal sensory information (Cui et al., 2013a; Hikosaka et al., 1989). D1 MSNs seems to get
stronger inputs from sensory cortex, whereas D2 MSNs receive stronger inputs from motor cortex (Wall et al., 2013). However, D2 MSNs seem to require less input strength than D1 ones to become active. For the minimal input
with which the latter would emit their first spike, the D2 MSNs would fire
at 15 Hz (Gertler et al., 2008). MSNs seem to have a spontaneous low firing rate in vivo (Berke et al., 2004), and require a strong correlated input to
activate (Nisenbaum & Wilson, 1995). Direct pathway MSNs are believed to
receive more glutamatergic inputs than those of the indirect pathway (Gerfen &
Surmeier, 2011; Gertler et al., 2008). Beside, D1 MSNs in the matrix receive
more synaptic terminals from intra-telencephalically projecting cortical neurons than from pyramidal tract projecting neurons, a pattern that is reverted for
D2 MSNs (Deng et al., 2015; Reiner et al., 2010). Matrisomes receive three
times more thalamic inputs than striosomes, further supporting the differential processing of the inputs through the BG pathways (Fujiyama et al., 2006).
47
Moreover, a delay of 6 to 7 ms between cortical responses and MSNs ones,
and anatomical tracing data, suggest an absence of thalamic engagement in the
initial MSNs response (Reig & Silberberg, 2014). Also, the inhibition component in the MSNs response followed the excitation by a few milliseconds,
indicating the involvement of intra-striatal interneurons, possibly recruited by
the same cortical excitatory input.
3.3.1.2
Ventro-dorsal distinction
An additional organisation of the striatum commonly considered is to distinguish the ventral part from the dorsal one (see Humphries & Prescott (2010)
and Balleine et al. (2007) for a review). In relation to the actor-critic architecture, the activity in the ventral striatum of monkeys has been linked with
the RP (Schultz et al., 1992), thereby possibly endorsing the role of the critic
(van der Meer & Redish, 2011). Furthermore, activity in the medial striatum
has been suggested to be task-related, and that it can bias animals to collect
rewards (Kimchi & Laubach, 2009). Similarly to striosomes, the ventral striatum has been associated with the processing of inputs from limbic, associative
and orbitofrontal areas. MSNs in the nucleus accumbens seem to preferentially
target non-dopaminergic neurons in the VTA, some of which project back to
the nucleus accumbens (Xia et al., 2011). However, MSNs in the dorsal striatum have been shown to project to GABAergic neurons in the SNr but not to
dopaminergic neurons in the SNc (Chuhma et al., 2011). The ventral part of
the putamen and the nucleus accumbens (part of the ventral striatal complex)
receive input from the limbic cortex (Albin et al., 1989; Alexander & Crutcher,
1990). All these regions are believed to influence the RPE computation in the
VTA, through the ventral striatum (O’Doherty et al., 2006). Further stressing
the ventro-dorsal distinction, dopaminergic neurons from the SNc have been
reported to co-release GABA onto dorsal striatum MSNs of both the direct
and indirect pathways (Tritsch et al., 2012) whereas co-release of glutamate
was observed onto projections neurons in the nucleus accumbens, part of the
ventral striatum (Stuber et al., 2010; Tecuapetla et al., 2010). This classic distinction has been challenged to some extent, Voorn et al. (2004) suggesting a
dorsolateral and ventromedial organisation instead, based on behavioural and
anatomical data.
In a study where they recorded simultaneously in the ventral and dorsal
striatum in rats during a two-armed bandit task, Kim et al. (2009) noted signals related to the upcoming choice only in the latter. Once the action had been
initiated, they observed signals conveying the choice, its action-value and its
outcome by neurons in both structures. This agrees with the hypothesis that
the striatum codes action values and can update these representations based on
48
the outcome. In a similar study, but this time with recordings in the dorsomedial and dorsolateral striatum, Thorn et al. (2010) found that ensemble activity
pattern increased as training progressed and was correlated with performance,
whereas the associative (dorsolateral) striatum exhibited an increase of its activity in a first time before fading out as training progressed. Furthermore,
it did not correlate with behavioural aspects and the authors suggested that it
could be important for performance monitoring and could mean a modulation
of the access of dorsolateral sensorimotor loops to the control of action by the
dorso-medial loops.
A slight deviation from the actor-critic framework has been discussed by
Atallah et al. (2007) where the dorsal striatum would be primordial for performance but not for learning, and would thereby represent the actor, whereas
the ventral striatum would be critical for both learning and performance, here
embodying the role of a director. However, this ventro-dorsal distinction has
lost some interest in the past few years and may need to be revisited, as experimental evidence seemed to blur the demarcation (Nieh et al., 2013), to the
benefit of the other distinction: the patch / matrix one. Two studies by Kravitz
et al. (2010, 2012) suggested that, through optogenetic activation, neurons in
the ventral striatum may have similar functions to those in the dorsal striatum.
3.3.1.3
Reward prediction
In studies using fMRI, the striatum and the OFC exhibited responses related to
the TD error in reinforcement learning tasks with various reward probabilities
(Berns et al., 2001; O’Doherty et al., 2003). However, as it is believed that
the RPE is actually encoded by dopaminergic neurons (section 3.3.4), it may
be that the signal in the striatum has more to do with the RP than the actual
RPE. Indeed, the similarity in the response of striatal and dopaminergic neurons, with both exhibiting RPE coding in rats (Oyama et al., 2010), could be
linked with the idea that the striatum holds the values of both the current and
the previous states/actions, such that the TD can be computed (Morita et al.,
2012). Besides, no relation was denoted between the activity of these striatal
neurons and the licking movements during the conditioned stimulus presentation. This goes to support a prediction specific pathway, decoupled from the
actual action selection (Oyama et al., 2010). Only the dopaminergic neurons
showed negative RPE coding, i.e. a decrease of activity in response to an omission of an expected reward, where only positive coding RPE was observed for
striatal neurons. This indicates a possible dual pathway organisation, similar
to the D1 and D2 matrisomal MSNs, in the prediction, where one pathway
would be involved in the positive RP, and the other one for negative RP. These
pathways would target dopaminergic neurons and GABAergic interneurons,
49
respectively, in the dopaminergic nuclei (section 3.3.3). Moreover, findings
of inverse RPE coding in GPi neurons in monkeys (Hong & Hikosaka, 2008)
can back the idea that the RP can be used in the selection process. Beside,
striosomes have been found to project directly to the SNc, with some collaterals to the GP, whereas matrisomes send GABAergic connections to neurons
in the GPe and in the GPi/SNr (Fujiyama et al., 2011; Gerfen et al., 2013;
Gerfen, 1984; Lévesque & Parent, 2005; Watabe-Uchida et al., 2012). Thus, it
has been suggested that connections from striosomes to dopaminergic neurons
could convey RPs in the same way matrisomes signal action values (Amemori
et al., 2011) and that they could be the source of reward related information,
part of a distinct reward evaluation circuit (Stephenson-Jones et al., 2013).
With respect to an actor-critic architecture, the role of the actor has therefore been associated with matrisomes who can impact the selection through
the D1 and D2 pathways, and the critic would be played by striosomes who
can exert control on the dopaminergic neurons, and would thus be involved
in computing the RPE (Fujiyama et al., 2011; Houk et al., 1995). What has
been commonly reported is the plasticity onto MSNs D1 and D2, however
there was no indication about the neurons being part of a striosome or a matrisome. The classical D1 and D2 pathways originate from matrisomes. To
our knowledge, there is no experimental data assessing the projections from
striosomes with respect to the dopamine receptor type these MSNs express,
but a circuitry similar to a direct and indirect pathway has been described (Fujiyama et al., 2011, 2015). The direct pathway would correspond to the direct
projection from striosomes, possibly from MSNs expressing the dopamine D1
receptor, onto dopaminergic neurons, and the indirect pathway would represent the circuit from striosomes, possibly from MSNs expressing the D2 receptor type, to the GP and onto dopaminergic nuclei. However, in a review,
Humphries & Prescott (2010) suggested that patches of the dorsal striatum are
made of MSNs expressing both D1 and D2 receptors whereas they considered the striosomes in the ventral striatum to be predominantly of the D1 type.
MSNs in matrisomes belong either to the direct or indirect pathway, even if
some limited overlap has been reported, notably with evidences that D1 MSNs
also project to the GPe (Fujiyama et al., 2011; Kawaguchi, 1997; Lévesque &
Parent, 2005). Striosomal MSNs for their part, target specifically the SNc and
the VTA (Fujiyama et al., 2011; Watabe-Uchida et al., 2012), and the presence
of some axon collaterals to the GP have been described (Fujiyama et al., 2011).
All this calls for further investigations of these possible RP-related loops.
As dopaminergic neurons project back to striosomes, the specific role of
these connections still has to be determined but it seems reasonable to assume
a similar role as with the matrix, that is of modulating the synaptic plasticity
at the level of striosomes. Due to the topology of the inputs received by the
50
striosomes, it was considered that they could be involved in processing cognitive and emotion-related functions in the computation of the prediction of the
reward. Indeed, this has been experimentally supported in a cost-benefit conflict task with rats, where optogenetic inhibition of the prelimbic cortex, which
preferentially projects to striosomes, leads to the disinhibition of the latter and
to a shift of behavioural choices towards high cost high reward options. Excitation of the same region resulted in a bias of the selection away from that
choice (Friedman et al., 2015).
3.3.1.4
Interneurons
There are several distinct interneuron types in the striatum, and even if we do
not implement these populations specifically in this work, we will briefly describe their roles in modulating striatal activity (for a review, see Silberberg
& Bolam (2015) and Tepper & Bolam (2004)). As opposed to fast spiking
GABAergic interneurons in the cortex, those in the striatum lack the reciprocity with their target neurons, thereby providing only feedforward inhibition (Gittis et al., 2010; Planert et al., 2010). MSNs are believed to interact
also through these striatal interneurons (Graybiel et al., 1994). The presence
of monosynaptic GABAergic connections between MSNs has however been
reported, mostly between MSNs featuring the same dopamine receptor type
but also from the D2 MSNs to D1 MSNs (Taverna et al., 2004, 2008). Regarding interneurons, both cholinergic and GABAergic types have been reported
(Kreitzer, 2009; Tepper & Bolam, 2004; Tepper et al., 2010). They receive
various excitatory, mostly from the cortex and thalamus, and modulatory inputs and contribute to determining whether MSNs, D1 and D2, fire or not
(Aosaki et al., 1998; Bracci et al., 2002; Kawaguchi, 1997; Koós & Tepper,
1999; Tepper et al., 2008). In particular, the activation of thalamo-striatal axons induced a burst of cholinergic interneurons, itself triggering a transient,
presynaptic suppression of the cortical inputs onto MSNs, thereby providing a
gating role to thalamus (Ding et al., 2010).
MSNs seems to fluctuate between an hyperpolarised down-state and a depolarised up-state, possibly constrained by the local circuitry (Nicola et al.,
2000). It has been reported that application of dopamine could excite the fast
spiking interneurons, as cocaine does, thereby exerting a major inhibitory influence on MSNs (Bracci et al., 2002). Feedforward inhibition occurs mostly
via fast spiking interneurons, involved in the information processing during
action selection (Gage et al., 2010; Kawaguchi, 1993; Kawaguchi et al., 1995;
Szydlowski et al., 2013), and via tonically active ones, believed to be involved
in coding the motivational value and probability of the reward (Apicella, 2007;
Apicella et al., 2011; Wilson et al., 1990; Yamada et al., 2004). These fast
51
spiking interneurons target both D1 and D2 MSNs and can deliver strong and
homogeneous inhibition (Planert et al., 2010). In fact, inhibitory synaptic potential from single GABAergic interneurons have been shown to be powerful enough to silence a large number of projection neurons simultaneously
(Koós & Tepper, 1999). Inhibition across interneuron populations has also
been reported (Friedman et al., 2015). Striatal cholinergic interneurons are
even able to trigger GABA release from dopaminergic terminals, in order to
inhibit MSNs (Nelson et al., 2014). Additionally, synchronous activity of these
cholinergic interneurons can directly cause release of dopamine in the striatum,
bypassing the need for dopaminergic neurons activity (Threlfell et al., 2012).
Acetylcholine depolarises fast spiking interneurons but attenuate the GABAergic inhibition of MSNs (Koos & Tepper, 2002). Furthermore, optogenetic activation of cholinergic axons has led to disynaptic inhibition of MSNs through
two circuits with different kinetics (English et al., 2011). Indeed, dendrites
and axons of interneurons have been shown to cross compartmental borders,
notably between matrisomes and striosomes, in what could be a limbic control of the striosome on the behaviours driven by sensorimotor information
processing matrix (Crittenden & Graybiel, 2011).
3.3.2
Other nuclei and functional pathways
As we have mentioned previously, the BG are believed to be critical in action
selection, and it is thought the direct and indirect pathways compete to control
the selection by releasing inhibition on the structures downstream, the thalamus and brainstem, themselves responsible for relaying and sending the actual motor command (Grillner & Robertson, 2015; Grillner et al., 2005; Mink,
1996). However, the presence of relatively segregated parallel BG-thalamocortical loops are also believe to exhibit some integration and competition between them (Graybiel et al., 1994; Haber, 2003; Lehéricy et al., 2004; Mengual et al., 1999) (additionally, see Sesack & Grace (2010) for details on the
microcircuitry of the BG). As we have seen, the striatal GABAergic D1 and
D2 MSNs in the matrix are the source of the direct and indirect pathways. The
D1 MSNs inhibit the GPi/SNr whereas the D2 MSNs inhibit the GPe, which in
turn sends inhibitory connections to the STN. The latter then exhibit feedback
excitatory connections with the GPe, and feedforward ones to the GPi/SNr. An
additional pathway, involved in reward related information processing, stems
from MSNs in striosomes, which project to the dopaminergic nuclei.
It has been hypothesised that the parallel loops could represent action channels (Redgrave et al., 1999), an idea which can be supported by the reported
consistent functional topology throughout the BG (Alexander et al., 1986; Romanelli et al., 2005). These loops could furthermore enable processed infor52
mation to be used as inputs back to the striatum, to either fine tune the selection
or to enable sequence of actions. Their reentrant feature might also allow for
model-based learning and thus for improved predictions. It might enable the
system to compute in which state it would probably end up given the current
state and the possibles actions, and might use the expected reward associated
in the evaluation of the choices. In a recursive way, this could be a part of the
action selection.
In comparison to the striatum, the STN is smaller in volume and in number
of cells, by a ratio of 1/60 to 1/100, the GPe by a ratio of 1/12 and the GPi by
1/20 (Yelnik, 2002). This decrease of neural tissue when flowing from cerebral
cortex to the downstream nuclei of the BG could suggest a convergence of the
information. This has led to the hypothesis that the BG could operate a compression of cortical information controlled by reinforcement learning (Bar-Gad
et al., 2003). The GPi/SNr have been suggested to exhibit a somatotopically
organized structure, where the GPi would be involved in axial and limb movements and the SNr would be associated with head and eye movements (Gerfen
& Surmeier, 2011). The GPi and SNr receive similar inputs and the latter has
been considered as a caudo-medial extension of the former.
The cascade of disinhibition ends in the thalamus, targeted by the inhibitory connections from the output nuclei of the BG (Chevalier & Deniau,
1990; Penney & Young, 1981; Ueki, 1983). The functional organisation observed in the BG seems to be preserved in the downstream projections to thalamus and brainstem (Mana & Chevalier, 2001; Mengual et al., 1999). Neurons in the GPi/SNr serve as an inhibitory gate of motor output, and can be
modulated by the BG pathways (Freeze et al., 2013; Nambu, 2008). Indeed,
activation of D1 MSNs will inhibit the tonically active GABAergic SNr neurons, which project to brainstem motor regions, thereby disinhibiting them and
thus promoting motor output (Freeze et al., 2013; Grillner et al., 2005; Sippy
et al., 2015). Additionally, SNr neurons also project to thalamus, which could
be involved in the control of task performance and part of a suggested feedback loop through striato-thalamo-cortical circuits. Neurons in the GPi, GPe,
STN and SNr show spontaneous activity without any synaptic input (Atherton
& Bevan, 2005; Delong et al., 1984; Freeze et al., 2013; Gernert et al., 2004).
The indirect pathway plays an opposite role to the direct pathway in the
selection (Kravitz et al., 2010, 2012; Tai et al., 2012). However, the details
and specificity of its contribution are still unknown. It has been hypothesised
that it could operate a surround-inhibition of competing actions in the GPi/SNr
during a motor response (Mink, 1996). This seems to assume a particular somatotopic organisation of the action representations in the various structures
of the BG, where actions mechanistically similar would be neighbours, an organisation that has been reported (Alexander et al., 1986; Romanelli et al.,
53
2005).
Concerning the GPe, there are limited knowledge about its functional impact. It is mostly considered as a relay in the indirect pathway between D2
MSNs and STN neurons. However, due to its reciprocal connections with the
latter, several studies have suggested a role of oscillatory pacemaker to this
GPe-STN pair (Bevan et al., 2002; Plenz & Kital, 1999). Sato et al. (2000) reported connections from GPe neurons targeting mostly the STN and the SNr,
but also the GPi and the striatum, suggesting its involvement on most structures
of the BG.
The STN is supposed to be involved in behavioural switching, that is, allowing a new behaviour to be undertaken by terminating the current action
(Hikosaka & Isoda, 2010). It has indeed been suggested that the BG could
enable the automatic execution of sequences generated in cortical areas (Jin
et al., 2014). The STN also receives input from the cortex, the thalamus and
the GPe (Temel et al., 2005) and projects to the GPi, to form the so called
hyperdirect pathway, and back to the GPe. It also has disynaptic projections to
the cerebellar cortex (Bostan et al., 2010), which projects back to the striatum,
supposedly carrying motor and non-motor information and considered to be
involved in delay learning conditioning (Bostan et al., 2013). It is commonly
believed to act as a global suppression pathway (Frank, 2006; Nambu, 2004).
It could be especially useful following a change in the environment requiring
critical action selection (Nambu, 2004; Nambu et al., 2002). Moreover, experimental and computational studies in rats have underlined the role of the
STN for global action suppression in case of conflicting input cues (Baladron
& Hamker, 2015; Baunez et al., 2001). It has also been suggested that a high
STN activity could increase reaction time. Recently, artificial inhibition of
the basal forebrain has also been shown to be sufficient to induce a rapid behavioural stopping in rats, when applied before a go response initiation (Mayse
et al., 2015). This neural mechanism, outside of the fronto-BG circuit, adds
further support to a more specific inhibitory role of the indirect pathway of the
BG.
The output nuclei of the BG project to thalamus which in turn projects back
to the striatum (Kimura et al., 2004; McHaffie et al., 2005). Furthermore, connections from motor thalamus, which is co-active with voluntary and passive
movements of discrete body arts (Nambu, 2011), have been shown to exhibit a
high degree of specificity in topographical projections to the striatum (Mengual
et al., 1999). The motor circuit within the striato-pallidal system is believed to
receive a delayed read-out of cortical motor activity (Marsden & Obeso, 1994).
The thalamus is commonly considered as the source of efference copy signals
for the BG (Fee, 2012). This efference copy, also called corollary discharge,
enables the removal of the agent self-produced modifications on the environ54
ment from its sensory perception of the world, in order to evaluate what has
really changed (Blakemore et al., 2000). The functional role of the efference
copy in the BG has also been suggested to contribute to the establishment of
the eligibility traces, in that it cleans the noise from all the firing patterns of the
striatal cells during the selection (Lisman, 2014). Indeed, as the actual selection seems to happen downstream of the striatum, possibly in the GPi/SNr or
even in the thalamus, the upstream structures are not aware of which action has
been selected and performed (Fee, 2014; Redgrave & Gurney, 2006; Schroll
& Hamker, 2013). It has been observed that the activity of MSNs following
the selection is more driven by that choice than by its pre-selection activity
(Lau & Glimcher, 2008; Lisman, 2014). Nambu (2004) hypothesised that the
efference copy could help the indirect pathway to ensure the activation of only
the selected command.
The functional organisation of the BG has led to different interpretations,
but they however all relate to some extent to action selection and reward related
processes (Chakravarthy et al., 2010) (see Schroll & Hamker (2013) for more
theories). It has been suggested that motor inputs and contextual inputs could
be the source of two subcircuits, one involved in the classical action selection
and the other one in extending the repertoire of possible actions (Sarvestani
et al., 2011). Besides, Bar-Gad & Bergman (2001) hypothesised that reinforcement signals and local competitive rules in the BG could serve to reduce
the dimensionality of the sparse cortical information in order to increase the
correlation of the neuronal activity, thereby increasing the efficacies of feedforward and lateral inhibitory connections.
The BG have also been linked with sequences generations, supposing that
subnetworks such as the GPe-STN reciprocal interactions could provide traces
of previous activity to effectively work as a short term memory (Beiser &
Houk, 1998; Berns & Sejnowski, 1998; Dominey et al., 1995). There are some
evidence that the BG could indeed encode concatenation of action sequences
(Jin & Costa, 2010; Jin et al., 2014; Wörgötter & Porr, 2005). Related to that
is the representation of time, which is, to the least, pivotal to the BG, and might
possibly be implemented within its circuits (Gershman et al., 2014; Jin et al.,
2009; Mauk & Buonomano, 2004) (see section 3.3.4 for an example, where
the inhibitory effect of the predicted reward matches temporally the actual reward delivery). It remains to be understood how this is computed. Hypotheses
mostly rely on assemblies of neurons, tuned to different time intervals through
oscillations (Matell & Meck, 2004), or on the integration of ramping activity (Rivest et al., 2010; Simen et al., 2011) or even on dynamics of recurrent
networks (Buonomano & Laje, 2010).
55
3.3.3
Dopaminergic nuclei
The dopaminergic neurons are found in two nuclei, the VTA and the SNc. Although they might not be officially classified as part of the BG, they share a
lot of connections with them, and especially with the striatum, and are critical to their functions through the release of the dopamine neuromodulator.
They project and release dopamine (but not only, see below, and for details
on dopamine and its effects, see section 3.3.4) to different targets, both cortical and subcortical, and receive inputs from different areas (Lammel et al.,
2011, 2012, 2014; Watabe-Uchida et al., 2012). The reward expectation and
actual reward signals could be provided by the pedunculopontine nucleus, the
amygdala, the hypothalamus, or the OFC (Matsumoto & Hikosaka, 2007; Nieh
et al., 2015; Okada et al., 2009). These nuclei also have GABAergic projection
neurons, targeting the striatum and PFC (Carr & Sesack, 2000).
The VTA and the SNc also exhibit different electrophysiological properties
and molecular features (Roeper, 2013). A distinction in the firing patterns of
VTA versus SNc dopaminergic neurons in response to aversive events has been
revealed (Matsumoto & Hikosaka, 2009b). Additionally, a similar distinction
holds also when based on the targeted areas of the projections from these
dopaminergic neurons. The ventral striatum receives inputs from the VTA
and the ventromedial SNc, which are also regions inhibited by aversive stimuli, and the dorsal striatum receives inputs from the dorsolateral SNc, themselves excited by the same stimuli (Lerner et al., 2015; Lynd-Balta & Haber,
1994; Matsumoto & Hikosaka, 2009b). In rats, cats and primates, the dorsal
SNc seems to target mostly the matrix, while the ventral part projects to striosomes (Gerfen et al., 1987; Jimenez-Castellanos & Graybiel, 1989; Langer &
Graybiel, 1989; Prensa & Parent, 2001). Matsuda et al. (2009) however found
only a preferential innervation of matrisomes and striosomes by the dorsal
and ventral SNc, respectively. A recent study reported a possible division of
dopaminergic neurons suggesting distinct information streams: one targeting
the dorsomedial striatum and the other one the dorsolateral striatum (Lerner
et al., 2015). The authors additionally noted reciprocally connections from
these striatal regions to the same dopaminergic neurons.
The dopaminergic neurons project to a wide range of areas, and of interest here, to a very wide striatal area, innervating both the striosome and matrix
compartments (Matsuda et al., 2009). Furthermore, the dopamine signal seems
to be widely broadcast, that is, a single dopaminergic neuron in the SNc exert
a strong influence on a large number of striatal neurons (Matsuda et al., 2009;
Threlfell & Cragg, 2011). Additionally, the dopaminergic neurons in the SNc
affect the GP and the STN, collaterally from the axons targeting the striatum
(Prensa & Parent, 2001). Surprising observations revealed that dopaminer56
gic neurons projecting to the striatum could co-release glutamate or GABA,
possibly following a ventrodorsal distinction of the striatum (Nieh et al., 2013;
Stuber et al., 2010; Tecuapetla et al., 2010; Tritsch et al., 2012). This expended
repertoire of influence of the dopaminergic neurons has still to be functionally
asserted. It can not account for the whole modification of MSNs’ excitability, as the experiments which reported such effects did so with the diffusion of
dopamine agonists.
Concerning the inputs to the dopaminergic neurons, it has been shown that
SNc neurons receive excitatory inputs from somato-sensory and motor cortices, and from the STN, whereas neurons in the VTA receive inputs from the
lateral habenula (LH) and the rostromedial tegmental nucleus. However, the
most abundant source of inputs to these dopaminergic nuclei is found in the
BG, and especially in the striatum and the pallidum, and are mostly ipsilateral
(Lerner et al., 2015; Watabe-Uchida et al., 2012). Dopaminergic neurons receive monosynaptic inhibitory inputs from striosomes and the SNr, and polysynaptic disinhibitory inputs from the GP through the SNr (Fujiyama et al., 2011;
Tepper & Lee, 2007). In the SNc, at least 30% of the synaptic inputs to the
dopaminergic neurons are glutamatergic, and 40-70% are GABAergic (Henny
et al., 2012). It has recently been reported that frontal cortical neurons project
to the VTA and the SNc, and that activity in the presynaptic population results
in an elevation of the dopamine level in the striatum (Kim et al., 2015). Lateral hypothalamus also sends both excitatory and inhibitory connections to the
VTA, which projects back to the former (Nieh et al., 2015). Another study reported connections from paraventricular, in addition to lateral, hypothalamus,
and from dorsal raphe to dopaminergic and GABAergic neurons in the VTA,
all supposed to be implicated in reward-related behaviours (Beier et al., 2015).
Moreover, Beier et al. (2015) have described an anterior cortex-VTA-lateral
nucleus accumbens circuit, detailed as reinforcing given that excitation of anterior cortex leads to dopamine release in the lateral nucleus accumbens. This
suggests a top-down control of midbrain dopaminergic neurons, bypassing the
striatum. Their study also showed direct connections from neurons in the nucleus accumbens to dopaminergic and GABAergic neurons in the VTA, possibly also involved in a top-down control of the reinforcement signal. Chuhma
et al. (2011) further reported that GABAergic interneurons in the substantia
nigra (SN) seemed to be preferentially targeted by MSNs in the striatum, with
a few direct connections from MSNs to the dopaminergic neurons in the SNc.
This is also a support of a dual control of the dopaminergic neuron activity
by striatal neurons, capable of triggering both decreases and increases in the
activity of the targeted midbrain neurons.
The VTA receives inputs from widely distributed brain areas (see Sesack
& Grace (2010) for a review), but of particular interest are the PFC-VTA and
57
striato-VTA loops. Within the VTA, GABAergic neurons, possibly interneurons, preferentially target dendrites of dopaminergic neurons (Omelchenko &
Sesack, 2009). It was further noted that these GABAergic neurons also receive
local inputs, suggesting a complex circuitry within the VTA. Optogenetic activation of these neurons reduced the excitability of the dopaminergic neurons
(van Zessen et al., 2012). Dopaminergic neurons in the VTA seem to get phasically excited by reward and reward predicting events, in a manner consistent
with RPE coding, whereas GABAergic neuron activity appears to be determined predominantly by reward predicting stimuli (Cohen et al., 2012). Pan
et al. (2013) have described anticorrelated activity of inhibitory neurons, seemingly projection neurons from the SNr, with midbrain dopaminergic neurons,
with the former firing before the onset of the phasic dopaminergic response.
Additionally, the authors showed that optogenetic activation of SNr projection
neurons was sufficient to suppress firing of dopaminergic neurons. These results, tend to provide support to the hypothesised role of these interneurons
in the inhibition of the phasic dopaminergic signal, a critical mechanism for
extinction and for the RPE computation. This agrees with the indirect pathway from striosomes to dopaminergic neurons via the GP reported in rats by
Fujiyama et al. (2011).
The activity of the dopaminergic neurons has been reported to decrease
with an unexpected loss of a predicted reward or with a negative reward (e.g.
painful stimulus) (Matsumoto & Hikosaka, 2007). However, Matsumoto &
Hikosaka (2009b) and Tan et al. (2012) have observed both inhibition and excitation of dopaminergic neurons by aversive stimuli, and that these dopaminergic neurons were anatomically distinct. The inhibition by an aversive stimulus might be transmitted from the LH (Ji & Shepard, 2007; Lammel et al.,
2012; Matsumoto & Hikosaka, 2007; Stephenson-Jones et al., 2013), which
has been shown to be excited (inhibited) by CS predicting aversive (positive)
events (Matsumoto & Hikosaka, 2009a) (see Hikosaka & Isoda (2010) for a
review). However, as most of neurons in LH are prominently glutamatergic,
they must target inhibitory neurons as relay. Such relay has been found in rats
and primates, where GABAergic neurons in the rostromedial tegmental nucleus receive excitatory inputs from the LH, but also exhibit a negative RPE
and project to the dopaminergic neurons somata (Hong & Hikosaka, 2011).
Optogenetic activation of fibers from the LH to the rostromedial tegmental
nucleus promoted behavioural avoidance in mice, mimicking the effect of an
aversive stimulus (Stamatakis & Stuber, 2012). It has indeed been reported
that LH sends inhibitory projections to the SNc and the VTA (Ji & Shepard,
2007; Quina et al., 2014), and itself receives connections from a subset of GPi
neurons, linked with reward related signaling (Hong & Hikosaka, 2008). Furthermore, reward probability and uncertainty about the timing of the delivery
58
do not seem to be the only factors which extend the duration of the phasic response of dopaminergic neurons (Hollerman & Schultz, 1998; Matsumoto &
Hikosaka, 2007; Oyama et al., 2010). The intrinsic value of an outcome or
event might be coded by the limbic system and especially the amygdala, even
though plasticity in the amygdalo-striatal pathway has been reported (Namburi
et al., 2015). Interestingly, no significant change in the response profile of the
dopaminergic neurons during the reward phase of a trial has been shown in
relation to variation in the motivation (Oyama et al., 2010). The authors suggested that this could be due to adaptation to the increased reward value, by the
prediction system. An other possibility for the coding of the motivation could
be in the tonic activity of the dopaminergic neurons (Hamid et al., 2015). Let
us note that the tonic activity of striatal neurons has also been linked with the
encoding of motivational information (Apicella, 2002; Yamada et al., 2004).
Returning to the phasic activation of the dopaminergic neurons, their optogenetic activation slows extinction and can drive new learning of antecedent
clues during associative blocking procedures (Steinberg et al., 2013). The authors argued that this could support the idea that RPE signaling by dopaminergic neurons is causally related to cue-reward learning.
About the RPE computation, Stephenson-Jones et al. (2013) suggested
that the striosomes might be in a position where they could control directly
the dopaminergic neurons in the midbrain, and indirectly via the LH (Hong
& Hikosaka, 2011). Synapses onto dopaminergic neurons in the VTA exhibit
synaptic plasticity, which seems to be dopamine-dependent (Bonci & Malenka,
1999; Lüscher & Malenka, 2011; Thomas et al., 2000). Notably, cocaine exposure leads to LTP in midbrain dopaminergic neurons (Liu et al., 2005; Ungless
et al., 2001), whereas amphetamine inhibits it through D2 receptors activation
(Jones et al., 2000). Jones et al. (2000) further reported bidirectional synaptic
modifications on VTA dopaminergic neurons. These results could support the
idea that the striosomal-dopaminergic neuron pathway would be the substrate
of the RPE computation, acting as the critic and learning to predict the reward.
However, there is a need for a more systematic testing of the variables at play,
similarly to the studies on cortico-striatal plasticity (section 3.3.4), for instance
on the dependence on the activation of AMPA and NMDA receptors.
3.3.4
Dopamine and synaptic plasticity
Dopaminergic neurons [...] cannot say much to the rest of the brain but what
they say must be widely heard.
- Glimcher (2011)
Dopamine is one of the, at least, 100 neurotransmitters present in the brain.
59
It affects its targets primarily via two classes of receptors: D1 and D2. As we
have seen, it is predominantly released by two nuclei, the VTA and the SNc,
and we will here consider only these sources. Extracellular dopamine concentration is critical for modulating plasticity, notably at cortico-striatal synapses
(Calabresi et al., 2000; Pawlak & Kerr, 2008; Reynolds & Wickens, 2002;
Reynolds et al., 2001; Shen et al., 2008; Surmeier et al., 2007; Wickens et al.,
2003; Yagishita et al., 2014). Elsewhere, dopamine has also been reported to
modulate STDP as much as to turn it into its symmetrical, anti-Hebbian, shape,
in PFC (Ruan et al., 2014). In lateral PFC, the blocking of D1 and D2 receptors impairs the learning of new stimulus-response associations and cognitive
flexibility but not the memory of pre-existing associations (Puig et al., 2014).
Importantly, the phasic activity of dopaminergic neurons has been shown
to encode the difference between the current reward, or expected reward, and
a weighed average of the history of the outcome, and is similar to the TD
error of reinforcement learning models (Bayer & Glimcher, 2005; Dayan &
Balleine, 2002; Glimcher, 2011; Hamid et al., 2015; Hollerman & Schultz,
1998; Montague et al., 1996; Schultz, 2007a; Schultz et al., 1993, 1997, 1998;
Suri, 2002; Suri et al., 2001) (also see Wörgötter & Porr (2005) for a review
of TD models and their relation to biological mechanisms). It has to be noted
that any reward predicting event can be used in place of an actual reward, as it
acts as a temporal transfer of the reward (section 2.3.3.1). Therefore, a reward
predicting event generates a transient dopamine increase, whereas the actual
reward delivery will not, as it is fully predicted (Oyama et al., 2010; Schultz
et al., 1997). The same inhibition of the phasic change could also occur for the
reward predicting event, as it itself gets predicted by an earlier event, similarly
to n-ary conditioning (section 2.2.4.3).
At the delivery of a reward, if it has not been expected, a phasic increase of
the dopamine level occurs (fig. 3.2). However, if it has been expected and obtained, no significant variation of the dopamine level is observed. Furthermore,
if the expected reward is omitted, the firing rate of the dopaminergic neurons
decreases, at the time when the reward is expected. Eventually, the dopamine
signal also adapts to the omission (Pan et al., 2013). Basically, dopaminergic phasic signals are believed to inform on whether recent actions have led
to a reward, in order to update the decision policy towards rewarded actions
(Hamid et al., 2015; Stopper et al., 2014). It is therefore a surprising outcome
that is critical for learning rather than a predicted one, similarly to a concept in
information theory (section 4.3.3).
The activity of dopaminergic neurons has been shown to be modulated
according to the value of the upcoming action (Morris et al., 2006). An increase in the firing rate of the dopaminergic neurons triggers a transient surge
in extracellular dopamine concentration sufficient for behavioural condition60
ing (Lavin et al., 2005; Tsai et al., 2009). Improved learnings from negative
outcomes have been observed in human subjects following a transient decrease
in the dopamine level (Cox et al., 2015). Similarly, optogenetic inhibition of
dopaminergic neurons mimics a negative RPE in a classical conditioning setup
(Chang et al., 2015) and causes avoidance of the associated action in an operant conditioning task (Hamid et al., 2015). Moreover, mice which could not
produce dopamine demonstrated less interactions toward a sucrose delivering
tube than controls (Cannon & Palmiter, 2003). Such mice became hypoactive
and let themselves die of starvation even though food was readily available.
Restoration of dopamine production in the nucleus accumbens reinstated exploratory behaviours while in the caudate putamen it restored feeding and nesting (Szczypka et al., 2001). This further supports the idea that dopamine plays
a role in goal directed behaviours and not specifically in reward processes.
In the BG, the pre- and postsynaptic activity as well as the dopamine level
are the obvious factors for synaptic modification, for which the standard STDP
learning rule can not account for (see section 3.2.4 for detail on STDP and section 4.2.1 for a presentation of some models of synaptic plasticity). However,
some evolutions have been offered to this rule (Farries & Fairhall, 2007; Frémaux et al., 2010; Gurney et al., 2015; Izhikevich, 2007; Legenstein et al.,
2008). Additionally, dopamine-dependent synapses in the striatum of mice
with NMDA receptor knock out exhibit almost no LTP (Dang et al., 2006),
which adds support to the idea that multiple factors are involved in the plasticity. Moreover, GABAergic signaling has been shown to be able to control
the polarity of STDP at cortico-striatal synapses: the blockade of postsynaptic
GABA receptors reverses the temporal order of plasticity for both D1 and D2
MSNs (Paille et al., 2013). Therefore, taking into account the diversity of striatal neurons seems necessary to unfold the complex spike timing dependences
observed at cortico-striatal synapses (Berretta et al., 2008; Fino & Venance,
2010).
The definitive account of the synaptic change at cortico-striatal synapses
has yet to be reported, due to the complexity of recording and controlling the
four (at least) interdependent variables: pre- and postsynaptic spike timing,
dopamine receptor type and dopamine level. The precise timing required by
STDP might be important (Shen et al., 2008) (see Fino & Venance (2010) for
a review of studies which found STDP in the striatum), but other studies only
remarked a looser form of learning, based on correlated activity of the pre- and
postsynaptic neurons (Yagishita et al., 2014) (see Pawlak et al. (2010) for a review of studies reporting non-standard STDP in the striatum). The dopaminedependent plasticity of cortico-striatal synapses is believed to be bidirectional:
both LTP and LTD have been observed, although there is no clear consensus
on the factors involved (Fino et al., 2005; Reynolds & Wickens, 2002; Shen
61
Figure 3.2: Activity of dopaminergic neurons in a conditioning task. From
Schultz et al. (1997), reproduced with permission from AAAS.
et al., 2008; Surmeier et al., 2007). Peaks of dopamine are believed to lead
to LTP of cortico-striatal synapses of D1 MSNs whereas dips would lead to
LTP of cortico-striatal synapses of D2 MSNs (Nair et al., 2015). Shen et al.
(2008) have described LTP in D1 MSNs and LTD in D2 MSNs with phasic
increase of dopamine, and vice versa with phasic decrease of dopamine. However, Fino et al. (2005) have reported anti-Hebbian STDP at cortico-striatal
synapses in rats in vivo, without detailing the dopamine receptor type and
without varying the dopamine level. These results are opposite to those of
Pawlak & Kerr (2008), who found standard STDP in rat brain preparations.
They furthermore noted that blocking the dopamine receptors prevented both
LTP and LTD. Additionally, local influences in the striatum have been shown
to impact the release of dopamine by affecting directly axon terminals (Cachope & Cheer, 2014; Nelson et al., 2014), synchronous activity of striatal
cholinergic interneurons is sufficient to provoke dopamine release by activation of nicotinic receptors on axons of dopaminergic neuron (Threlfell et al.,
2012). The functional role of this mechanism remains to be elucidated, but
the authors suggested that it could go beyond the processes of action selection.
The synaptic plasticity of thalamo-striatal connections has been suggested to
display higher plasticity in patch (synapses on dendritic spines) than in matrix
(dendritic shafts) (Fujiyama et al., 2006).
62
A problem persists however, since it has yet to be determined how the
activity on such short timescale as STDP interacts with the long-term feedback
that usually occurs, corresponding to the temporal credit assignment problem
(Berke & Hyman, 2000; Houk et al., 1995).
It has been reported that, in monkeys, dopaminergic neurons can encode a
context-dependent prediction error (Nakahara et al., 2004). Furthermore, the
activity of the dopaminergic neurons has also been been linked with aversion,
saliency, novelty and uncertainty signaling (Bromberg-Martin et al., 2010;
Schultz, 2007a,b). The RPE has been suggested to reflect the integration from
different reward dimensions, e.g. amount, type and risk, into a common subjective scale of value (Lak et al., 2014). This indicates that the dopaminergic
signal carries rich and complex information about reinforcement.
Dopamine seems to affect the response properties of striatal neurons (Calabresi et al., 2000; Shen et al., 2008; Surmeier et al., 2007). Indeed, dopamine
depletion has been shown to increase the excitability of MSNs, by enhancing the responsiveness of the remaining synapses, compensating for the observed decrease of the number of glutamatergic synapses (Azdad et al., 2009;
Day et al., 2006; West & Grace, 2002) (see section 3.4.1 for more details on
the phenomena, and Gerfen & Surmeier (2011) for a review on the effects
of dopamine on projection systems in the BG). In rats, the use of dopamine
agonists and antagonists causes a decrease and an increase, respectively, in reaction time (Leventhal et al., 2014). In the dorso-medial striatum, the ratio of
AMPA/NMDA has been reported to increase in D1 MSNs and decreased in
D2 MSNs after learning (Shan et al., 2014).
The dopamine phasic activity commonly described occurs however, with a
very short latency following the presentation of a reward (Schultz et al., 1997;
Tobler et al., 2005). This short latency, < 100 ms, is believed to be too fast to
enable the necessary processes of the RPE computation, as it is even faster than
a saccadic eye movement. It has therefore been suggested to account for novelty salience, where an unpredicted event should attract attention, and should
most likely trigger a response (Berridge, 2007; Redgrave et al., 2013). Indeed,
the superior colliculus features a direct projection to the SN and is sensitive
to the location of luminance changes (Comoli et al., 2003; McHaffie et al.,
2006). The information rich phasic dopamine signal observed could thereby
result from the overtraining of the task. Climbing fibers have also recently
been shown to display an activity similar to the TD error during eyeblink conditioning in mice (Ohmae & Medina, 2015). The dopaminergic signal might
thus not be the only way to inform about the RPE. Neurons in the OFC and
in amygdala also exhibit responses to reward events such as reward predicting
instructions and predictions, or to internally generated reward goals (Hernádi
et al., 2015; Schultz et al., 2000).
63
The dopaminergic signal could act selectively in a form of stimulus-reward
learning, in which incentive salience is conferred to reward cues and is subject to individual differences (Flagel et al., 2011). The accurate valuation of
the stimulus and comparison with its predicted value would require foveation
and processing of the sensory information, possibly involving the PFC for
estimating the value of future actions (O’Reilly & Frank, 2006; Potts et al.,
2006). Redgrave & Gurney (2006) have suggested that this short latency signal could be more of a ’sensory prediction error’ than a RPE. This short latency
dopamine release could have a similar role to the reward-related dopamine phasic changes, that is to to link the action temporally close to the novel stimulus
(Redgrave & Gurney, 2006). It would indeed avoid the contamination of the
memory of the possible responsible events with those directly related to the attention shifting actions, and would thereby ease the difficult credit assignment
problem (Izhikevich, 2007; Redgrave et al., 2008). Another, non exclusive hypothesis is that the short latency burst could drive the system to take an action,
in response to the novel stimulus. This would rely on the change in the intrinsic excitability of the MSNs caused by the variation of the dopamine level. It
has also been remarked that the phasic activity of SN dopaminergic neurons
could signal the initiation and termination of specific action sequences (Jin &
Costa, 2010).
Other plastic connections have been described in relation to the BG, notably synapses from neurons in the nucleus accumbens onto VTA dopaminergic neurons, where drug evoked plasticity has furthermore been reported
(Lüscher & Malenka, 2011; Ungless et al., 2001, 2004) (see Berretta et al.
(2008) for an overview regarding synaptic plasticity in the BG).
The knowledge of the effect of dopamine on the SNr, the GPi, and the GPe
is somewhat limited, but there are some indications that it could also modulate
synaptic plasticity (Cossette et al., 1999). In the BG, the D1 and D2 dopamine
receptors can also be found in the substantia nigra (Levey et al., 1993).
3.3.5
Habit learning and addiction
Addictive and habitual behaviours could both depend on the same processes,
where the former would be the extreme result of an otherwise ordinary mechanism. One of the main effects of drug addiction is the inhibition of GABAergic
neurons in the VTA (Lüscher & Malenka (2011) and see Hyman et al. (2006)
for a review). Recently, there has been a frantic increase in the list of behaviours that could develop into an addiction problem. The culprit of all these
claims is the dopaminergic signal and is usually framed by fMRI studies showing a similar pattern of activity in locations associated with dopamine in the
brain when doing activity X than when injecting heroine, therefore X must be
64
considered as a drug.
At the biological level, the striatum, along with its dopaminergic innervations, seems to play a significant role in drug-dependence, with an involvement
progressing from ventral to dorsal parts (see Gerdeman et al. (2003), Everitt &
Robbins (2005) and Lüscher & Malenka (2011) for a review). Action encoding
has been suggested to undergo a dynamic reorganisation in the dorsal striatum
as habit learning develops (Jog et al., 1999). The addiction and compulsive behaviour could result from a loss of effect of the phasic dopamine change on the
plasticity, or even of the inversion of LTD into LTP, further strengthening the
compulsive response (Nishioku et al., 1999). Parvaz et al. (2015) have found
an impaired activity in human cocaine addicts relative to negative RPEs, and
suggested this could be the reason for continued drug use even after conviction. However it does not address if this impaired neural response is the cause
or the consequence of cocaine addiction. Synaptic plasticity at synapses onto
dopaminergic neurons in the VTA has been shown to be massively impacted by
cocaine exposure, inversing the learning rule, and having long lasting effects
(Lüscher & Malenka, 2011). Similarly, habit development has been prevented
by dopamine deafferentation in the dorsolateral striatum (Faure et al., 2005).
Seger & Spiering (2011) have defined five common, but not universal, features of habit learning: it is inflexible, slow or incremental, unconscious, automatic, and insensitive to reinforcer devaluation (see Yin & Knowlton (2006)
for a review on the role of the BG in habit formation). Lesion and pharmacological studies have been helpful to characterise the role of structures and pathways. For example, inactivation of the infra-limbic PFC leads to an absence
of the response associated with the devaluated reward (Coutureau & Killcross,
2003). Inhibition of the ventral striatum once a habit is formed does not impact
the occurrence of this habit, but is however critical for its acquisition. The performance rely on the dorsal striatum, and even with its inhibition during acquisition, the removal of this inhibition leads to immediate similar performance as
those of control rats (Atallah et al., 2007). The authors therefore suggested a
division between the ventral and dorsal striatum in habit formation, assigning
the role of the actor to the dorsal striatum, and of the critic to the ventral striatum. More specifically, lesions of the dorsolateral striatum have been shown to
prevent habit formation in rats, even with extensive training (Yin et al., 2004).
It has therefore been suggested that habit formation proceeds from a gradual
loss of the dopamine dependence of synapses related to neurons in the dorsolateral striatum. However, ventral striatum abilities would remain unaffected.
To put that into perspective, let also note that high-frequency stimulations of
the nucleus accumbens have been reported to not significantly affect the activity of the VTA or its discharge pattern but to cause a potent decrease in the
number of dopaminergic neurons firing spontaneously in the SNc (Sesia et al.,
65
2013). Such stimulations have been suggested to contribute to the disruption of
pathological habit formation by affecting the SNc-dorsal striatum projections.
In a study considering the patch/matrix specificity, Canales (2005) showed
a silencing of the matrisomes following drug exposure. He suggested that this
inactivation of the matrix, and thereby the reliance on the striosome based pathways only, could represent neural end-points of the shift from goal-directed
selection to conditioned habitual behaviour.
Synchronised activity from the BG has been proposed as a mechanism
teaching cortical pathways in order to establish a habit outside the BG (Atallah et al., 2007). Additionally, Howe et al. (2011) reported a change in the
oscillatory frequencies in the ventromedial striatum with the development of
learning, possibly suggesting a more effective inhibition of MSNs and thus a
more fixed pattern of activity in the output of the BG. Burguiere et al. (2013)
observed impaired fast spiking neuron striatal microcircuits, of which the compensation was possible through focused optogenetic activation of the lateral
OFC, thereby restoring the inhibition of compulsive behaviours. These results
could suggest the development of a dysfunctional control of the inhibition in
the striatum in habit formation and compulsive or addictive behaviours. The
balance of inhibition between MSNs and interneurons is most likely involved
in regulating a dynamic decision transition threshold (Bahuguna et al., 2015).
From the TD learning model perspective, it has been suggested that the drug
induced reward signal might be impossible to balance by the learned expected
value, thereby constantly driving the model to over-select the action leading to
it (Redish, 2004).
Habit formation mechanisms have also received lights from studies on bird
songs. In song birds, vocal experimentation and learning require a BG-related
circuit, the anterior forebrain pathway (Olveczky et al., 2005). A lesion of this
circuit prevents the proper development of songs but has only a few restricted
effects in adults (Scharff & Nottebohm, 1991). This structure has also been
shown to be necessary for modifying the spectral, but not the temporal structure of bird song (Ali et al., 2013). This further suggests a temporal representation external to the BG. Blocking the output of this anterior forebrain pathway
prevented the improvement of performance normally observed in song learning
in Bengalese finches. However, the unblocking of this pathway contribution after training leads to immediate excellent behaviours. Moreover, inhibiting the
activity in the output nucleus of the anterior forebrain pathway during learning
not only prevents any improvement of the performance during training but also
completely blocks the learning.
It has been suggested that the BG could monitor the results and outcomes
of behavioural variations engaged by other brain regions and can direct these
brains regions towards valued behaviours (Atallah et al., 2007; Charlesworth
66
et al., 2012). Such pathways outside of the BG have been hypothesised to enable faster information transfer thanks to fewer synaptic contacts than through
the BG, and thus reduced reaction times and automatic functioning (Ashby
et al., 2007). It has to be mentioned that the cerebellum has been linked with
habit formation, but seemingly only for motor skill learning (Callu et al., 2007;
Hikosaka et al., 2002; Salmon & Butters, 1995).
The mechanisms leading to the desensitisation of the synaptic plasticity to
the RPE are still not understood and there is a need for new theories and models (see Smith & Graybiel (2014) for a review of suggestions). For example,
it has been suggested that addictive behaviours could result from the irruption
or intrusion of a model-free representation in a selection that should rely on
model-based knowledge, such that the construction of the world and its tenants
are not taken into account anymore by the habit system (see Dolan & Dayan
(2013) and Graybiel (2008) for a review). A general assumption concerning
habit formation and addiction is the development of reward-independent circuit, possibly outside the BG.
3.4
BG-related diseases
As the BG are massively involved in action selection, associated dysfunctions
most commonly lead to motor troubles. Attention Deficit Hyperactivity Disorder (ADHD), Tourette’s syndrome, dystonia, Parkinson’s disease (PD) and
some psychiatric disorders have been related to some extent with the BG. Imbalances between the neuronal activity of the two main pathways have been
described as underlying the motor symptoms (Kreitzer & Malenka, 2008).
Additionally, some movement disorders have been suggested to result from
dysfunctional GABAergic microcircuits (interneurons) (see Gittis & Kreitzer
(2012) for a review). Computational models of reinforcement learning have
recently been used to assess the role of disturbance of the dopaminergic system in the diseases mentioned, but also in addiction or in schizophrenia (for a
review, see Maia & Frank (2011)).
3.4.1
Parkinson’s disease
PD is a debilitating neurodegenerative disease, the second most common after
Alzheimer’s disease. It is mostly idiopathic, with weak genetic correlations
and a relatively large number of environmental causes. It has a prevalence
of 1% and 4% in the population over, respectively, 60 and 80 years old (see
de Lau & Breteler (2006) for a review). Patients suffering from Parkinsonian
symptoms show a variety of troubles, usually starting with motor related afflictions, such as tremor, dyskinesia, postural instability and rigidity. Evolution is
67
generally gradual with time and psychiatric disturbances usually occur at later
stages, with depression and dementia, along with general cognitive difficulties,
as the most commonly observed.
The biological hallmark of PD is a degeneration of dopaminergic neurons
in the SNc which is believed to cause imbalance in the pathways of BG (Albin
et al., 1989; DeLong, 1990). Indeed, one of the most efficient treatment of the
motor symptoms is the administration of dopamine agonists and of L-DOPA,
which is a precursor of dopamine, noradrenaline and adrenaline (all part of
catecholamines). L-DOPA can cross the blood-brain barrier and can therefore
increase the dopamine concentration through enzymatic processing. It must
be noted that patients treated with L-DOPA at too high doses can experience
psychotic episodes and eventually develop dyskinesia (Iravani et al., 2012).
The SNc is not the only dopaminergic nucleus affected in PD, it has been
shown that the VTA also degenerates in the disease, although less than the
SNc (Alberico et al., 2015). Motor symptoms are thought to occur not before
a loss of 50 to 70% of the dopaminergic neurons (Obeso et al., 2004, 2008).
As a result of the dopaminergic neurons depletion, different consequences
have been reported at the cellular level. However, a general increase in neural
activity has been observed, affecting mostly D2 neurons, which seem to become oversensitive (Bamford et al., 2004). D1 MSNs have been depicted to
become supersensitive to D1 receptor activation, even though the actual number of these receptors decreases (Gerfen, 2003). In rats, after acute dopamine
depletion, MSNs and cholinergic interneurons become more excitable whereas
GABAergic interneurons become less excitable (Fino et al., 2007). Moreover,
hypoactivity in the GPe has been described. This, in turns, results in a higher
activity in the STN, thus increasing the inhibitory output of the GPi and the
SNr (see Obeso et al. (2008) for a review). However, it is still unclear how the
increased firing of the STN does not rescue the activity in the GPe, as it has
reciprocal connections to it. A direct modulatory effect of dopamine onto the
STN has been described, where a decrease of the neuromodulator causes an
increase in the activity of the nucleus (Kreiss et al., 1996).
Dysfunctions in the indirect pathway are thought to be critical in PD.
Synaptic plasticity has recently been the focus of several studies and is considered as a possible source for the imbalance of the dynamics in the BG.
Manipulations of LTD of synapses of D2 MSNs via the administration of D2
receptor agonists have been linked with reduced motor deficits (Kreitzer &
Malenka, 2007). Bilateral activation of D2 MSNs using optogenetic stimulation has been shown to elicit a Parkinsonian state, with bradykinesia, freezing
and reduced locomotion in mice (Kravitz et al., 2010). Within the striatum, the
strength of recurrent connections between MSNs has been shown to be greatly
reduced in PD models (López-Huerta et al., 2013; Taverna et al., 2008). The
68
dopamine loss has been shown to facilitate LTD in D1 MSNs but to favor LTP
in D2 MSNs (Schroll et al., 2014; Shen et al., 2008). Loss of dopamine dependent synaptic plasticity has been reported on subthalamo-nigral synapses in
experimental parkinsonism in rats (Dupuis et al., 2013). The authors hypothesised that the resulting loss of LTD could facilitate the spreading of pathological activity to the SNr. Recently, it has been suggested that, in PD conditions,
structural plasticity does not correlate with functional plasticity in the motor
area M1 (Guo et al., 2015). Pallidotomy, which is the surgical destruction
of the GPi, leads to improvements of dyskinesia (Lozano et al., 1995) but is
also associated with adverse events such as contralateral weakness, visual field
defects and new learning impairments (Trépanier et al., 2000).
Deep Brain Stimulation (DBS) is another neurosurgical procedure aiming
to offer therapeutic benefits to patients. It furthermore provides the possibility
of reversibility and adaptability compared to pallidotomy. It consists in the implantation of electrodes deep in the brain, most commonly onto the STN, delivering high frequency electric pulses continuously (100 Hz and more) (Benabid,
2003). It has proven to be very effective to stop tremor, chronic pain and dystonia notably (see Kringelbach et al. (2007) for a review). However, it is still
unclear as to how these high frequency stimulations of the STN lead to a relief
of the symptoms (see Chiken & Nambu (2014) for a review of hypotheses). As
previously mentioned, in the PD state, the STN is already more active than normally. It thus seems counter intuitive to benefit from stimulating it even more.
Furthermore, high frequency stimulation of the STN is not linked with any
effect on the dopamine level (Hilker et al., 2003). It has been suggested that
such high frequencies would actually induce neural silencing, which would be
in line with the effects observed. The classical view suggesting an increase of
D2 pathway inhibition has recently been challenged by studies showing that
lesions of the thalamus or of the GPe do not cause bradykinesia or akinesia,
suggesting a highly organized network effect (Obeso et al., 2000). Following
studies shifted their focus on to neural dynamics such as oscillations. Betaband synchronous oscillations in the dorsolateral region of the STN in patients
with PD have been described, as well as increased synchrony. The latter has
been suggested to result from the increased inhibitory contribution from the
striatum onto the GPe caused by over activity of the indirect pathway observed
in PD (Kumar et al., 2011). More recently, studies have brought the attention on the involvement of abnormal synaptic plasticity as a cause of motor
and cognitive dysfunctions (Iravani et al., 2012). Computational models have
here been critical to test the associated hypotheses (Schroll et al., 2014). It has
furthermore been suggested that the imbalance could instead lie between the
matrix and striosome compartments and could be the cause of disorders in the
BG, such as PD motor troubles (Crittenden & Graybiel, 2011).
69
3.4.2
Huntington’s disease
Huntington’s disease is also a neurodegenerative disease but is of genetic origin. The evolution of the disease impacts negatively motor coordination and
cognitive abilities (see Walker & Walker (2007) for a review). Life expectancy
is around 20 years after the onset of the first symptoms. It is the most common genetic cause of abnormal involuntary writhing movements, chorea. The
phenotype also includes dystonia, incoordination, cognitive decline and behavioural difficulties. There is no cure for the disease even though some of the
mechanisms are well described. Striatum is the area of the brain which is the
most damaged by the disease, but its effects spread beyond this nucleus during
the later stages. MSNs projecting to the GP die because of protein aggregation, forming inclusion bodies within the cell, growing enough to stop neuronal
functions such as the transport of neurotransmitters. It has been suggested that
chorea and motor disorders could result from this cell loss, possibly decreasing the D2 pathway contribution, or causing an imbalance between the D1 and
D2 pathway, leading to the disinhibition of unwanted motor outputs (Albin,
1995; DeLong, 1990). In mice, a specific near-complete deletion of the vesicular inhibitory amino-acid transport, responsible of the storage of GABA and
glycine in synaptic vesicles, in matrisomal MSNs, leads to an elevated locomotor activity, muscle rigidity and other symptoms similar to those of Huntington’s disease, thereby suggesting a link of this disease with a dysfunctional
GABAergic signaling of MSNs (Reinius et al., 2015).
3.4.3
Schizophrenia
Schizophrenia is a mental disorder affecting 0.7% of the population (Saha
et al., 2005). Its etiology links it with both genetic and environmental factors, even though the diagnostic still relies on the symptoms described by the
patient, the signs observed by the clinician and the history of the disorders.
The most characteristic features are the positive symptoms of hallucinations
and delusions. The negative symptoms commonly consist in a reduced social
engagement, a dysfunctional working memory, a loss of motivation (avolition)
and a reduced speech output (alogia). This condition puts a lot of strain on the
patient and its relatives.
Early in childhood, e.g. at age four, future schizophrenia patients show
normal cognitive functioning. The cognitive impairment is an early emerging
gradual progressive growth, where a substantial part of the neuropsychological
decline is already observed before the onset of the disease (Meier et al., 2014;
Woodberry et al., 2008). A puzzling fact about schizophrenia is that no one
with congenital or early blindness has been diagnosed with this mental disease
(see Silverstein et al. (2013) for discussions on the mechanisms that may be
70
involved).
Recently, an hypothesis involving dopamine has received both attention
and support from experiments. Amphetamines, which increase the level of
dopamine, are believed to worsen the psychotic symptoms of the patients, as
do optogenetic stimulations of frontal cortex neurons projecting to the VTA
and the SNc in mice (Kim et al., 2015). It was suggested that one role of
dopamine is to render salient a stimulus, in order to focus on its relation with
the environment. Psychosis would thus be a result of a dysfunctional dopamine
system, adding saliency to common and insignificant events or perceptions.
Delusions would be the consequence of the attempt to make sense of these
false beliefs (Kapur, 2003). Reward associated dysregulation could be compensated by recruitment of prefrontal areas, in a effort to reduce the dissonance
between beliefs and sensory integration. Experiments have indeed found abnormal RPE responses in the midbrain, striatum, and limbic system in patients
with psychosis (Murray et al., 2008). Additionally, the reaction times of patients with schizophrenia have been shown to be faster than controls to neutral
stimuli. It has been suggested that patients fail to make a distinction between
events that are motivationally salient and neutral ones. Deluded patients reach
their conclusion with significantly less evidence than controls (Garety et al.,
1991) and show abnormal bias in the face of disconfirmatory evidence (Warman, 2008). This indicates that patients develop false beliefs or fail to draw the
correct conclusions from the available information. Positive symptoms could
result from the wrong integration of new evidence causing false prediction errors to be propagated through a Bayesian system (see Fletcher & Frith (2009)
for a review). It has been reported that patients with psychosis show a tendency to update their reward values faster than controls and exhibit a lower
degree of choice perseveration (Li et al., 2014a). It has also been reported that
delusional ideation is associated with a perceptual instability and a stronger
belief-induced bias on reported perception. Furthermore, an enhanced connectivity between the OFC and the cortex has been described in patients (Schmack
et al., 2013). Moreover, the genes involved in dendritic plasticity have been associated with psychiatric disorders and with schizophrenia specifically (Tsuboi
et al., 2015).
The positives symptoms of the disease have also been suggested to result
from a failure related to the efference copy (Pynn & DeSouza, 2013). An
inability to recognize the efference copy signal as one’s own could lead to
believe that actions result from an external agent. This would support the hypothesis that an efficient RP system might prevent abnormal strengthening of
the connections in the D1 and D2 pathway. This would, in turn, expose the
associations to be less prominent. Furthermore, the processing of potential future rewards, through stronger activation of the ventral striatum and the right
71
anterior insula, might be abnormal in patients (Wotruba et al., 2014). There is
so far no cure to the disease, and the main treatment is symptomatic, through
antipsychotic medications.
72
4. Methods and models
The most important questions of life are indeed, for the most part, really only
problems of probability.
- Pierre Simon Laplace, Théorie analytique des probabilités, 1812
4.1
Computational modeling
Computational modeling is the representation of a model in mathematical and
algorithmic formalism. It requires the selection of the relevant features for
the model along with their adequate mathematical descriptions and parameters. Numerical tools can then be used to study the equations when analytical
means can not easily determine the dynamics of the system. The quantitative
results of computational models enable direct comparisons with real world
data, thereby providing a way to validate or falsify the model and its predictions. Computational models in neuroscience provide the ability to integrate
biological data from different experiments, possibly from different scales. Furthermore, they can serve to test hypotheses and to make predictions. Another
advantage is the possibility to access any parameter or variable value in the
model, a feature which is, as we have mentioned previously (section 3.1.5)
still problematic in experimental studies. A model is valued mainly on the
testable predictions it can offer. Additionally, trying to integrate the available
data in order to re-create and simulate the brain is a great way to realise what
relevant information is missing and this generates opportunities for new hypothesis and can thus guide experimental investigations. An increase in our
knowledge and comprehension of the brain’s intricate mechanisms therefore
results from this interaction between modeling and biology, whereas purely
descriptive approaches might fail to grasp what is important and what is required to understand this very complex system. Moreover, the capability to
simulate neurological diseases, psychiatric disorders and lesions is a great asset of computational neuroscience.
The level of detail can range from molecular and subcellular mechanisms
to abstract models of whole brains. However, in the current state of knowledge, considering higher cognitive functions seems to require higher levels of
abstraction. Indeed, the amount of integrable data increases, as do the number
73
of gaps where data is lacking. This is related to the approach taken towards
modelisation. Is the model build form the integration of detailed piece of data
or is it shaped by a theory of the mechanisms of the process studied (section
4.1.1)? For a particular system, Ockham’s razor asks for the selection the simplest model that can faithfully characterise the behavior of the system, and, at
the same time be simple enough to keep a high explanatory power. Finally,
the computational cost of a model has to be considered, as even with the computational capacity of the current supercomputers, there is no realistic way to
run large-scale simulations with a high level of detail in a decent amount of
time. However, the development of exascale computing and of neuromorphic
hardware could very soon provide executions close to real time, and possibly
even faster (section 4.1.3).
Computational neuroscience is a critical tool in the study of the brain. With
a more complete understanding of the brain will come great societal evolutions.
4.1.1
Top-down and bottom-up
A top-down approach starts with an abstract hypothesis or theory on how a
complex event or function could be algorithmically computed. The formulation of the model then has to respect the intended computational elements. On
the contrary, the bottom-up approach aims to get all the computations possible
from the elements of a structure in order to capture the function of the system.
In computational biology, the bottom-up approach relates to the study of the
emerging properties from the implementation of a complete biological description of all the experimentally characterised components of a system. A pure
bottom-up description is uncommon and, in practise, what differs is the extent
to which the modeller takes into account one or the other approach to constrain
the model. For example, in this work, which started as a top-down approach,
we used biological data in order to constrain our model when a computational
functionality could be implemented in various ways. Both considerations can
be applied depending on the level of organisation, i.e. any levels, except maybe
the highest and the lowest, can be set indifferently as the reference layer for
any of these two approaches. It also defines the effect, constraining or biasing, a higher level area has on low level sensory motor processing, in biology,
and conversely, low level processes constrain what kind of computations can
emerge from the biology.
4.1.2
Simulations
Simulation is the main tool in computational studies of the brain. It requires
the selection of a scale of detail, which depends on the question addressed,
and the definition of a model, describing the neural system at that scale. Along
74
with the simulation itself, there is a need to record and store the data produced,
in order to run analyses before the visualisation of the results.
4.1.2.1
Neuron model
We implemented what is probably the most common biological neuron model:
the leaky integrate and fire (LIF) neuron. Only sub-threshold dynamics are
formally described, i.e. when the membrane potential Vm is below the spike
threshold Vth . A spike is artificially emitted every time Vm > Vth , at which point
Vm is reset to its reset potential Vres and held there for a time tre f , simulating a
refractory period. The evolution of the membrane potential is defined as:
Cm
dVm
= −gL (Vm −VL ) + I(t)
dt
(4.1)
where Cm is the membrane capacitance, gL and VL are the leak conductance and
the leak potential, or reversal potential, respectively. I(t) is the input current to
the cell, which is related to the number of spikes sent by pre-synaptic neurons
and their associated synaptic weights.
The simplicity of this model allows for large scale modeling, but at the
same time restricts the diversity of dynamical features of biological neurons
that it can reproduce. The main reason that drove us to select this neuron model
was the compatibility issues with the neuromorphic hardware specifications of
the European project “BrainScaleS” European project (section 4.1.3).
4.1.2.2
NEST
The Neural Simulation Tool (NEST) is a software package used to run relatively large scale simulations of spiking point neurons, and such simulation
has been described as an electrophysiological experiment taking place inside
the computer (Gewaltig & Diesmann, 2007). It includes several synapse and
neuron models and can be extended with new models, functions and libraries.
This simulator focuses on the dynamics, size and structure of neural systems
rather than on the exact morphology of individual neurons. It can represent
spikes in continuous time and mechanisms such as plasticity and learning can
be implemented. NEST can be run in parallel on multiprocessor computers
and computer clusters to increase the memory and to speed up the simulation.
A python interface has been developed, enabling the integration of the many
extension modules for scientific computing available (Eppler et al., 2008).
We can also mention NEURON, which enables detailed multicompartmental neuronal models (Hines & Carnevale, 2001), Nengo, which focuses more
on large-scale simulations and high-level cognitive functions (Bekolay et al.,
2014), and Brian, also a spiking neural networks simulator with the aim of
75
making the writing of simulation code as easy as possible (Goodman & Brette,
2009). PyNN, python neural networks (Davison et al., 2008), is a simulatorindependent language, where the code written once can be run directly on any
simulators supported, e.g. NEST, NEURON or Brian.
4.1.3
Neuromorphic Hardware
The human brain, despite draining almost one fourth of the total energy consumption of the body, is a highly energy efficient system. Indeed, it requires
only 10-20 watts, compared to the several thousands devoured by a supercomputer, nowhere near capable of simulating in real time a detailed model of the
brain, or to plainly be able to perform complex cognitive tasks (see Lansner
& Diesmann (2012) for a review on challenges associated with spiking neural
networks and large-scale simulations). Reverse engineering is one way and
one aim of neuromorphic computing.
Comprehending the brain as a sum of electrical components, it is fair to
imagine that analog circuits could reproduce at least some of its dynamics and
behaviors (Mead, 1990). Additionally, the development of new architectures
could provide novel approaches for real-wold problems, where conventional
computer architecture can struggle to achieve good results. Recently, mixed
analog and digital as well as pure digital chips are also included in the “neuromorphic” designation. The aim is still to understand how individual neurons,
circuits and systems can enable complex computations, and how information
is represented. Such was the goal of the European projects FACETS-ITN and
BrainScaleS, in which we were involved. The focus was also on the interaction
of multiple temporal and spatial scales. The resulting mixed signal hardware,
based on custom design analog circuits emulating neurons and synapses, can
run much faster than real-time, up to 10000 times (Schemmel et al., 2008,
2010). Similarly to classical cluster computers, the bottleneck is the memory access in neuromorphic hardware. Be it for reading or writing updated
weights, or to commonly read state information of the system, these operations
are costly in term of time but also with regards to the code implementation.
Plasticity takes a significant toll on the simulation time on standard hardware architecture and neuromorphic solutions represent an opportunity to considerably reduce that cost in the simulations. Unfortunately, due to portability
troubles, they have not been as helpful, yet, as one could have hoped for in the
development of models featuring plasticity or non-conventional implementations. However, the current neuromorphic solutions, analog and digital, have
proven to be efficient on non-plastic, well developed models.
This lack of easily available plasticity modules acts as if yet another level
of constrains is put on the modeling part, this time from the hardware, as one
76
has to adapt to the restricted possibilities of implementation. Hopefully, these
issues will be overcome in the near future, with the continuation of the BrainScaleS’ hardware production into the Human Brain Project. The development
of memristor technology has recently attracted lots of interests for their capabilities to mimic synaptic adaptation and plasticity, and could become an
additional component in future neuromorphic systems (Prezioso et al., 2015).
In some cases, due to hardware limitations, it is simply impossible to port a
feature of the model, such as the learning rule here used on the current version
of the hybrid multiscale facility (HMF), in others, it requires relatively important development for the feature to be implemented in the software package
of the hardware, such as needed with the purely digital SpiNNaker hardware.
However, a decrease of the memory and computational footprints of the learning rule we use (section 4.3.4) has brought closer real-time simulation of a
cortex model in high performance computing (Vogginger et al., 2015). Furthermore, the hardware implementation of this learning rule in dedicated VLSI
could also unload computational burden on classical supercomputer architectures (Farahini et al., 2014).
4.2
Relevant computational models
We will here give an overview of the most influential models of synaptic plasticity and of the BG before presenting the framework of our work and our
models, of which a more exhaustive description of the latter can be found in
the papers included in the thesis. We will here focus especially on the spiking
version of our model. Since plasticity is at the core of our model, we will first
detail specifically some of the most common learning rules used in computational neuroscience.
4.2.1
Models of synaptic plasticity
The Hebbian learning principle was formulated on theoretical grounds, and
biological evidence came years later (section 2.2.5.2). In rate-based models,
the rates of firing of the pre- and postsynaptic neurons are measured over time
and determine the sign and amplitude of the plasticity. Among these models,
we can mention the one proposed by Oja (1982) and the BCM by Bienenstock et al. (1982). In the former, Hebbian plasticity additionally features a
decay term and neurons can compute a principal component of its input stream.
About BCM, a sliding threshold controlling the switch form LTD to LTP prevents the problem of positive feedback.
Hebbian learning and STDP are now the most common form of learning
rule implemented, especially in spiking networks, as they are both supported
77
by experimental data. Network stability, self-stabilisation of the weights and
rate, is achieved in STDP when the LTD side dominates over the LTP one
(Song et al., 2000). Variations and extensions of these rules have been offered
in order to account for more complex integration and new experimental data
(see Gerstner & Kistler (2002b) for STDP related descriptions and Gerstner &
Kistler (2002a) for mathematical formulations of Hebbian learning). For example, in the reinforcement learning framework, a third term has been added
in the STDP learning rule in order to provide information guiding the learning
based on the reward value or on the RPE, similar to the effect of dopamine
(section 3.3.4). Such a learning rule, commonly denoted reward-modulated
STDP, has shown the need for a critic part to predict the reward for each task
and stimulus separately (Frémaux et al., 2010). Furthermore, the implementation of TD learning in spiking networks through the use of reward-modulated
STDP has displayed good result in various tasks, such as in a simulated Morris
watermaze and cartpole problems (Frémaux et al., 2013). Alternatively, a more
direct implementation of the TD learning rule has been done without STDP
but assumed uncommon biological dynamics such as a temporally restricted
synaptic plasticity (Potjans et al., 2009). Reward-based and correlation-based
methods are similar in open-loop conditions but notably different in the closedloop condition, which is the normal setup of behavioral feedback (Wörgötter
& Porr, 2005). The reward, in classical TD learning, enters the update in an additive way, whereas a multiplicative correlation drives STDP. However, TD(λ )
methods make use of eligibility traces, which enter the algorithm in a multiplicative way. Rate based learning rules dismiss the temporal ordering of the
spikes critical in STDP but use the average rate over a temporal window.
The online update rule of STDP can be implemented by assuming that
each spike leaves a trace which decays exponentially in absence of spike. The
weight is updated by an amount based on the value of the trace of the presynaptic spike when the postsynaptic spike occurs, and by an amount based
on the value of the trace of the postsynaptic spike when a pre-synaptic spike
happens. Another common addition to the standard STDP are upper and lower
bounds for the weights. It results from the pairwise interaction in STDP that at
high enough firing rates, pre- before postsynaptic spikes can be picked up as
post- before presynaptic pairs, leading to depression of the synapse, which is
not observed in biology (Sjöström et al., 2001). Assuming a triplet interaction,
a combination of a pre- and two postsynaptic spikes with different time constants, instead of the pairwise one, can avoid such depression. Different phases
of synaptic plasticity have been suggested and a mathematical model details
three steps: the setting of synaptic tags, a trigger process for protein synthesis,
and a slow transition to synaptic consolidation (Clopath et al., 2008). This
enables the retention of the strength of the synapses over longer time scales.
78
Most other models will not update the weights as long as no new induction is
elicited, they would however decay, meaning that information can not be read
out without suffering modifications (Feldman, 2012).
In an attempt to take into account the bidirectional and dopamine receptor type dependent plasticity reported at cortico-striatal synapses, the STDP
learning rule was modified with a non-standard form of the plasticity function,
derived from in-vitro data, and implemented an eligibility trace. The resulting rule, denoted E-STDP, showed good similarities with experimental data on
plasticity and learning at cortico-striatal synapses (Gurney et al., 2015).
We can also mention the hypothesis of the first-spike times, where synaptic
plasticity is tuned to the earliest arriving spikes, through STDP (Guyonneau
et al., 2005).
Even if some biological mechanisms have been a posteriori presented as
explanation of the processes taking places during the synaptic plasticity, it
is not the focus of these models, which are phenomenological. However, it
should here be briefly noted that such biophysical models investigate the biochemical and physiological operations involved in the expression of synaptic
plasticity. Most of these models rely on calcium flux dynamics and NMDA
receptors to induce plasticity, both LTP and LTD. They can reproduce various
STDP curves (Froemke et al., 2005; Shouval et al., 2002).
4.2.2
Computational models of the BG
Simulations of reward learning experiments have already been done, but a majority were based on mean rate neurons (Frank, 2005; Gurney et al., 2001a;
O’Reilly & Frank, 2006; Schroll et al., 2014). More recently, models of the
BG implementing spiking neurons were described (Baladron & Hamker, 2015;
Stewart et al., 2012) (see Delong & Wichmann (2009) for an overview of the
development of the models). We will not go into the details of these models,
several good review papers have been published and should be considered for
further descriptions (Cohen & Frank, 2009; Doya, 2007; Gillies & Arbuthnott,
2000; Helie et al., 2013; Joel et al., 2002; Moustafa et al., 2014; Samson et al.,
2010; Schroll & Hamker, 2013; Wörgötter & Porr, 2005). The architecture of
the networks ranges from high level abstract description to more detailed construction, with some even focusing only on the dynamic of MSNs (Bahuguna
et al., 2015; Beiser & Houk, 1998; Humphries et al., 2009), and implementing
a fourth factor in the learning rule: the dopamine receptor type of the MSNs
(Gurney et al., 2015). The majority now seems to include the D1, D2 and
RP pathways with several nuclei (Chersi et al., 2013; Collins & Frank, 2014;
Frank, 2006; Jitsev et al., 2012; Stewart et al., 2012), but models with plastic
connections in all these three pathways are quite uncommon. The first spik79
ing network of the BG implemented the actor-critic TD learning, combining
local plasticity rules with a global signal (Potjans et al., 2009). Their model
showed similar performance compared to the discrete time, standard, TD algorithm but could not be mapped onto the BG. Baladron & Hamker (2015)
presented a model with plasticity in three pathways: direct, indirect and hyperdirect pathway, using Izhikevich’s learning rule (Izhikevich, 2007). They
did not implement the RP but instead fed the learning rule with the raw reward value, depending only on the success or not of the trial. As a result, they
showed that the direct pathway selected an action by disinhibiting the thalamus, that the indirect pathway was responsible for avoiding repeated mistakes
and that the hyperdirect pathway could delay the response until a correct decision is made.
Another common implementation is to model the inputs to the BG or the
raw reward signal as external Poisson processes or constant activity driving
the input layer or the reward population (Stewart et al., 2012). However, some
models feature the pre-motor cortex and thalamus (Chersi et al., 2013; Frank,
2006), or the OFC in decision making (Frank & Claus, 2006). Moreover, it
has been suggested that the cortical layer Va could represent the current state
whereas the layer Vb would code for the previous one, offering a straightforward correspondence with the TD error computation (Morita et al., 2012).
Chersi et al. (2013) have proposed a multilayer model of spiking neurons of
the cortico-BG-thalamo-cortical circuit organised in parallel loops, with STDP
and eligibility traces. One of the main result of the model is its ability to suppress an habitual behavior to engage into a goal-directed action. In a similar
approach, Doya et al. (2002) have described a multiple model-based reinforcement learning architecture, composed of modules with a state prediction model
and a reinforcement learning controller. The learning rates are weighted by a
responsibility signal, similar to the contextual relevance or responsibility of
modules, hypothesised by Amemori et al. (2011) to be determined by errors in
prediction of environmental features and furthermore assigned to striosomes.
The modules specialised for different domains in the state space, enabling a
good performance in the pendulum swing task.
In his model, Frank (2006) implements a model of the BG based on a combination of error-driven and Hebbian learning, where a difference in pre- and
postsynaptic activity is computed between a selection and a reward phase. Additionally, the dopamine level impacts the activity of the MSNs. Previously,
Frank (2005) had assumed an RPE sign-dependent cortico-striatal synaptic
plasticity. Connections onto D1 MSNs would be potentiated with increased
levels of dopamine, whereas those onto D2 MSNs would be for levels below
baseline. An interesting development of reinforcement learning has been to
include the reaction time in the reward rate (Bogacz & Larsen, 2011) as an
80
incentive to make a choice as fast as possible.
Models also provide the possibility to simulate diseases and lesions, with
PD being the prominent subject of interest, stressing the relation with biology (Frank, 2005; Frank et al., 2004), see Maia & Frank (2011), Delong &
Wichmann (2009) and Wiecki & Frank (2010) for a review.
Conditioning phenomena have been a major focus of early models, based
on Hebbian learning rules, enabling relatively straightforward sequence learning (Berns & Sejnowski, 1998). Models based on TD learning became widely
used to explain what has become a major focus of attention: the phasic dopaminergic signal described by Schultz et al. (1997). This followed the hypothesis
that the dopaminergic neurons activity, the plasticity of cortico-striatal connections, the TD signal, and the striatum organisation are all linked (Berns et al.,
2001; Houk et al., 1995; Montague et al., 1996; Suri, 2002; Suri et al., 2001;
Suri & Schultz, 2001). In particular, Houk et al. (1995), suggested a modular organisation of the striosomes as specific reward predictors. However,
they assumed a sub-compartmentalisation of the striosomes based on reciprocal and moreover specific connections from the dopaminergic neurons. The
actor-critic framework was nevertheless a popular way to bridge the gap between theoretical TD models and experimental data (see section 2.3.3.3 and
Joel et al. (2002) for a review). Such models are able to mimic the dopamine
signal during various conditioning paradigms, such as the ramping of activity before an expected reward and the burst at the occurrence of the CS (Niv
et al., 2005). Also based on TD learning, the function of the multiple corticostriato-nigro-thalamo-cortical loops has been studied in another model, suggesting a spread of limbic and cognitive information to motor loops by spiral
connections (Haruno & Kawato, 2006). This could be supported by the topological connections to striosomes and matrisomes (section 3.3.1). O’Reilly &
Frank (2006) presented a model derived from the TD algorithm where the actor would be trained by the critic and could control motor output, and where
dopaminergic projections to PFC could gate the updating of the working memory. The decision to maintain and to update working memory representations
is based on the reward-related information provided by the dopamine signal.
One of the first and most influential computational model of the BG credits
them with the role of action selection (Gurney et al., 2001a,b), following the
author’s earlier hypothesis that the BG deal with the allocation of restricted
resources to competing systems (Redgrave et al., 1999). It assumes and implements a global disinhibition of GPi/SNr by activity in STN and a focal
inhibition sent from striatal connections, effectively inhibiting all populations,
or promoting a specific population, respectively. It can be noted that the model
already implements LIF spiking neurons. However, the model does not include
learning, dopamine only impacts the activation of the MSNs. Therefore, the
81
authors limited their discussion to the way the selection is affected by various
modifications such as an increased or decreased level of dopamine, or by varying the inhibition / excitation rate in the model. A contrasting view has been
offered, attributing a different role to the BG: to compress cortical information
according to a reinforcement signal (Bar-Gad et al., 2000, 2003).
More recently but adapted from Gurney et al. (2001a), Stewart et al. (2012)
detailed a model of the BG with spiking neurons and using the delta rule for
learning. The spike patterns observed in the model show good similarity with
those of experimental recordings in the ventral striatum of rats, in a two-armed
bandit task. The authors suggested that an implementation similar to Potjans
et al. (2009) of slowly decaying Q-values, enabling the inclusion of the estimate of the following state’s value, would allow their model to learn to associate states that occur sequentially in time. They furthermore mentioned the
need to incorporate the ability to make precise temporal predictions. Such a
feature is not the main focus of this thesis but is nonetheless a critical property
in reinforcement learning. Dopamine has been suggested to be a prominent
component in such timing mechanisms (Daw et al., 2006; Doya, 2000b; Gershman et al., 2014; Rivest et al., 2010; Schultz, 2007a; Suri & Schultz, 1998).
Coincidence detection of oscillatory processes has notably been suggested as
a possible candidate (Buhusi & Meck, 2005; Matell & Meck, 2004).
As a further development from their 2009 model, Potjans et al. (2011)
implemented a more realistic dopaminergic population, in which firing rate
coded for the RPE. The authors suggested that learning from negative rewards
is impaired compared to the classical TD algorithm. They however made some
assumptions regarding the connectivity of the direct and indirect pathways for
the actor, which do not seem to be supported by experimental data. This model
was further extended to enable learning from negative reward by segregating
the impact of the level of dopamine on the plasticity of the D1 and D2 MSNs
(Jitsev et al., 2012). They also implemented a direct and indirect pathway,
based on the dopamine receptor type expressed by the MSNs, in both the critic
and the actor.
The implementation of both synaptic plasticity and dopamine-dependent
sensitivity of MSNs has led models to capture the impact of the neuromodulator on the plasticity, the choice incentive and the reaction time (Collins &
Frank, 2014). In their model, the weights in the two pathways are updated
symmetrically depending on the sign of the RPE.
4.3
Bayesian framework
The learning rule is the mathematical theory at the basis of the modifications
that can occur in artificial neural networks in order to improve their output and
82
performance, usually through repetition and by updating the weights and bias
values of the connections (see section 2.2 for some overview). We will first
introduce the concepts leading to the formalisation of our learning rule.
4.3.1
Probability
Probability is a measure of the likelihood of an event to occur. It is bounded
between zero and one, where one means absolute certainty and zero impossibility. The classical view of probability is the frequentist view. Here, there
is no information prior to the model specification, thus, phenomena are either
known or unknown. Repeatability is key to this approach, as the probability
is the ratio of having a particular outcome out of all the possible outcomes,
and would thus converge to a number between zero and one as the number of
observations increase. It focuses on P(X|Y ), that is, the probability of the data
X, given the hypothesis Y . The hypothesis is usually the null hypothesis, and
is fixed.
The alternative consideration is the “Bayesian” view, where probabilities
are seen as a measure of the belief about the predicted outcome of an event
(Doya et al., 2007). Conversely to the frequentist approach, unknown quantities are here treated probabilistically and it is the data that is fixed. The hypothesis can be true or false, with some probability between 0 and 1. Therefore, the
Bayesian view is centered on P(Y |X), the probability of the hypothesis given
the data.
4.3.2
Bayesian inference
There are two sources of information in Bayesian theory, data and prior knowledge. Data is the current sensory evidence about the environment. Prior knowledge relies on the memory of past similar experiences. These two sources are
combined in a optimal way to generate a prediction about the outcome of a considered event. The imperfection of our own sensory system would thus call for
such inference. It has been shown that Bayesian inference is what human do
when they learn new movements and skills, in a model-based schema (Körding & Wolpert, 2004; Wolpert et al., 1995), similar to statistical approaches
(Griffiths & Tenenbaum, 2006). The brain could thus represent the world in
terms of probabilities, where prior knowledge of a distribution of events could
be combined with sensory evidence to update the posterior distribution (Friston, 2005; Yang & Shadlen, 2007). The use of Bayesian inference in the study
of the brain is relatively recent, and has been applied with the idea that it could
describe how the brain deals with uncertainty. This uncertainty is inherent to
the world and to the noise from sensory inputs. Furthermore, it has been shown
83
that Bayesian probabilities can be coded by artificial neural networks and spiking neurons (Boerlin et al., 2013; Buesing et al., 2011; Deneve, 2008a; Doya
et al., 2007). The finality is assumed to be the posterior probability P(Y |X),
which is the probability of an hypothesis, or belief, given the evidence. Bayes’
theorem derives it as a consequence of a prior probability P(Y ) and a likelihood
function P(X|Y ):
P(X|Y ) · P(Y )
P(Y |X) =
(4.2)
P(X)
where P(X|Y ) is the likelihood, that is, the prediction that the sensory evidence observed can occur given the hypothesis engaged. P(Y ) is the prior
probability, that is the probability, often deduced from experience, that this
hypothesis is true before integrating new sensory evidence. It relates to the
distribution of the possible states of the world. The sum of all the hypotheses under consideration should be one. P(X), the evidence, is often called the
marginal likelihood (and is non-zero) and it acts as a normalising factor. It is
the same for all the hypotheses considered. It can thus be noted that if we have
uniform priors, then the posterior probability relies on the likelihood. Conversely, if the likelihood for all the sensory evidence is the same, the estimate
of the posterior probability is made based on the priors. Generally however, the
posterior probability depends both on the prior and on the likelihood. Bayes’
theorem states how a belief of a certain hypothesis P(X) should be updated,
based on how well the evidences were predicted from the hypothesis P(X|Y ).
Additionally, the relationship between the joint and the conditional probabilities can be noted:
P(X,Y ) = P(X|Y )P(Y ) = P(Y |X)P(X)
(4.3)
If the variables X and Y are independent, then their joint probability is reduced
to the product of two probabilities:
P(X,Y ) = P(X)P(Y )
(4.4)
and we thus obtain:
P(X|Y ) = P(X),
P(Y |X) = P(Y )
(4.5)
The variables are otherwise said to be dependent if this condition is not met.
The ability to predict is a marker of an internally generated representation
of the world, based on the experience a subject has gained from previous associations of events. If the probability of the co-occurrence of two stimuli is
greater than predicted by the probability of their isolated occurrence, it might
be valuable to form a memory of such relation. Updating this internal record of
84
probability with each perception of a stimulus enables the representation of the
world to steer away from confusion and disjointed events. Prior occurrences
of elements of a perceived stimuli association have to be considered in order to
infer if they form truly an association or of they are only random events. This
details how prior knowledge can impact the sensory experience. Furthermore,
events that are fully predictable are ignored, as they do not trigger a modification of the belief system. However, this can lead to problem when strong
beliefs can lead to overlooking informative evidence. Ultimately, abnormality in perception can arise from an unadapted representation of the world, and
vice versa (see section 3.4.3 for a description on how this can be relevant in
psychiatric diseases such as schizophrenia).
Predictions are not only made about when events may occur, but also about
the relation they share. Letting aside the normalising denominator P(X) in eq.
4.2, the posterior probability P(Y |X) is proportional to the product of the likelihood P(X|Y ) with the prior probability P(Y ). The hypothesis about the model
that maximises the posterior probability is called the maximum a posteriori
(MAP) estimate. An interesting way of using the posterior probability is to
feed it as the prior probability in the following step. For example, if the world
changes as independent sensory observations x = (x1 , x2 , ..., xt ) are made, having knowledge about this evolution, a transition probability P(Yt |Yt−1 ), makes
it possible to set the new prior at time t as the posterior at time t − 1 multiplied
by this transition probability:
P(Yt |x1 , ..., xt−1 ) ∝ P(Yt |Yt−1 )P(Yt−1 |x1 , ..., xt−1 )
(4.6)
The following gives the sequence of the Bayesian estimation:
P(Yt |x1 , ..., xt ) ∝ P(xt |Yt )P(Yt |Yt−1 )P(Yt−1 |x1 , ..., xt−1 )
(4.7)
This recursive estimation is called the Bayes filter, which is a widely used
probabilistic approach for estimating an unknown probability density function
recursively over time.
We will detail next how these probabilistic representations can be used to
quantify information.
4.3.3
Shannon’s information
As we have mentioned, the probability of occurrence is linked with how predictable an event is. The observation of a particular value x of a random variable X with probability P(X) defines how informative this observation is. Indeed, if P(X = x) is high, there is not much of a surprise to it, however, if
P(X = x) is low, then observing it is informative. This can be related to the
85
RPE dependent plasticity of reinforcement learning models (section 2.2.2) and
to the plasticity observed at cortico-striatal synapses (section 3.3.4). In order
to quantify the information of the event X = x, it is convenient to take the
logarithm of the inverse of the probability:
log
1
= − log P(X = x)
P(X = x)
(4.8)
Thus, for a fully predicted outcome, P(X = x) = 1, information is zero and
increases as P(X = x) becomes smaller. Additionally, taking the logarithm
enables us to measure the information of two independent events x and y, with
joint probability P(x, y), by the sum of each event:
log
1
1
1
1
= log
= log
+ log
P(x, y)
P(x)P(y)
P(x)
P(y)
(4.9)
It can be noted here that the unit of information resulting from the use of a
binary logarithm is called a bit.
An additional way of quantifying the information is through the measure
of the amount of uncertainty associated with the value of X, also called the
entropy of X, H(X):
H(X) = − ∑ P(x) log2 P(x)
(4.10)
x∈X
Therefore, for deterministic conditions, i.e. P(X = x) = 1 and P(X 6= x) = 0,
entropy is zero, H(X) = 0, and is maximal, log N, for a uniform distribution
over N values. The mutual information I(X;Y ) given by the sensory input Y
about the world state X can thus be determined by the difference between the
entropy of the a priori distribution of the inputs, H(X), and the entropy of the
a posteriori distribution of the world state given the stimulus, averaged over
all the repetitive presentations of the same stimulus, H(X|Y ), also called the
conditional entropy:
I(X;Y ) = H(X) − H(X|Y )
(4.11)
This details the source of the variability observed in the entropy. Further description of entropy and information for spike trains can be found in (Dayan &
Abbott, 2001; Doya et al., 2007; Rieke et al., 1997).
4.3.4
BCPNN
Summing up on the previous sections, the use of a Bayesian approach brings
several benefits in the quest to understand the brain. First, it predicts how an
ideal perceptual system would combine prior knowledge with sensory information. Secondly, algorithmic formulation of the Bayesian estimations can
86
provide interpretations on the functional computations of neural systems, e.g.
neural decoding. Thirdly, it offers a method to optimally decode neural data,
which can be noisy, given certain nature of signal and noise (Doya et al., 2007).
The Bayesian confidence propagation neural network (BCPNN) is an artificial neural network implementing a Hebbian learning rule inspired from a
naïve Bayes classifier, and was developed in analogy with the Hopfield model
(Lansner & Ekeberg, 1989). Probabilities or confidences of observing certain
events are represented by the activity of the corresponding units. Critically,
the synaptic weight between two neurons represents the statistics of their activations and co-activations, and the BCPNN learning rule describes how these
weights are computed.
The standard BCPNN learning rule is a Hebbian unsupervised, associative, two-factor learning rule. It has been successfully implemented in a variety of tasks such as associative and working memory (Lansner, 2009; Meli
& Lansner, 2013; Sandberg et al., 2000), memory consolidation (Fiebig &
Lansner, 2014), attentional blink (Lundqvist et al., 2010; Silverstein & Lansner,
2011), olfaction modeling (Kaplan & Lansner, 2014) and reinforcement learning (Johansson et al., 2003). Obviously, in a reinforcement learning paradigm
there is a need for an additional component that can alter and bias these probabilities in order for the system to adapt to the appropriate behavior. This
has been done through the implementation of the learning rate κ. It initially
resulted from the need to have some basic control on the plasticity window,
and allowed to turn the plasticity on, κ 6= 0, and off, κ = 0. However, it also
brought the capacity for the model to take into account a reinforcement signal.
In the model presented in this work, we focus on the connections between
state coding populations and action coding populations, and their weights represent the probability that, given that the system is in a specific state, a considered action will be the one selected. Therefore, by coupling the learning
rate to a set reward mapping, it becomes possible to bias the plasticity towards
the desirable behaviour. The learning rule thus evolved from a two-factor to a
three-factor learning rule. κ is a global parameter that affects all the BCPNN
weights, and can take any non-negative value. It controls the impact of the
recent correlations on the weights.
The goal for the model is to, basically, learn to select the action that leads
to the reward. Hence, if the selected action is not rewarded, one may wants
to decrease the probability of doing it again under the same circumstances.
Conversely, if some reward is obtained, the weight should be increased. These
plastic weights correspond to the cortico-striatal synapses in the BG and our
model features a D1 and a D2 pathway, in charge of promoting and suppressing, respectively, the selection of an action. Additionally, a similar process
occurs in the RP pathway, corresponding to the striosomo-dopaminergic nu87
clei pathway described in biology, to compute the confidence with which a
specific action, given a specific state, will lead to a reward.
We will first describe the standard BCPNN before going into the specifics
of our model of the BG. The BCPNN learning rule can be implemented with
spiking or non-spiking neural networks. We will here focus on the spike based
BCPNN, implemented in our most detailed model, but the general principles
are similar to the more abstract implementation (see Holst (1997); Lansner &
Ekeberg (1989) for a specific description of the non-spiking version). Results
form the spike-based learning rule support the view that neurons can represent information in the form of probability distribution (Tully et al., 2014).
The spiking BCPNN learning rule differs from STDP in that the precise order
of firing of the pre- and postsynaptic neurons does not necessarily impact the
sign of the synaptic changes. The plasticity depends more on the correlated
activity over a defined time interval, where correlated activity would increase
the connection strength whereas uncorrelated activity would decrease them.
Moreover, the use of eligibility traces allow for delayed learning (Tully et al.,
2014). This probabilistic approach provides a possible explanation as to how
the brain can deal with uncertainty. Bayesian inference is indeed well suited
to detail how the incoming information can be integrated with previous knowledge.
The BCPNN has been classically used with a columnar architecture, which
is most commonly discussed in the context of the cortex. This modular organisation, i.e. hypercolumns and minicolumns, has been shown to exhibit
biological relevance and thus fit functional and anatomical cortical structures,
which feature several layers and multiple inhibitory processes (section 3.1.4).
This generic model of the cortex considers minicolumns as the smallest functional units, organised in hypercolumns that regulate their activity by feedback
inhibition. Hypercolumns are, in turn, organised into cortical areas that build
up the cortex. The columnar structure of the network arises naturally from
the derivation of a naïve Bayesian classifier, as it requires the representation
of mutually exclusive events (see (Holst, 1997; Johansson, 2006; Lansner &
Holst, 1996; Sandberg, 2003) for rigorous mathematical investigations).
Usually, the standard BCPNN is described in the context of a classification task. It is used to find the class y j , e.g. a specific animal, which is the
most likely to explain or account for the various attributes or features observed
x1...n , where xi could code for a specific color or shape for example. In the work
presented here, different classes represent possible actions, and the aim is to
compute the probability of an action y j to be selected given the information
about the state of the environment. The firing rates of n pre-synaptic mini88
columns x1...n , i.e. P(x1...n ), provide information about the firing probabilities
of neurons in the postsynaptic minicolumn y j , via Bayes’ rule:
P(y j |x1...n ) = P(y j )
P(x1...n |y j )
P(x1...n )
(4.12)
Assuming the n input attributes as independent both conditionally and unconditionally given y j , the probability of the joint outcome x1···n can be defined
as a product:
P(x1...n ) = P(x1 ) · P(x2 ) · · · P(xn )
(4.13)
and so can the probability of x1...n given each action y j :
P(x1...n |y j ) = P(x1 |y j ) · P(x2 |y j ) · · · P(xn |y j )
(4.14)
With that, Bayes’ rule, eq. 4.12, can be extended to:
n
P(xi |y j )
i=1 P(xi )
P(y j |x1...n ) = P(y j ) ∏
(4.15)
Here, as the denominator is the same for each action y j , the assumption of
independent marginals above is trivial.
Taking the logarithm of this gives a sum which can conveniently be implemented in a neural network as it gives a linear expression in the contribution
from the attributes:
P(xi , y j )
log P(y j |x1...n ) = log P(y j ) + ∑ log
(4.16)
P(xi )P(y j )
i
Hypercolumns are supposed to represent specific attributes, e.g. color or speed,
and minicolumns code their specific values, e.g. blue or fast. Furthermore,
being comprised of a cluster of minicolumns, the hypercolumns are convenient
modules to control the activity among its various minicolumns. πxhi denotes
the relative activity representing the confidence in the presence of the attribute
value xhi . A normalisation of this activity in each hypercolumn can be obtain
through a strict or soft WTA connectivity within hypercolumns.
Therefore, assuming the modular network topology with H hypercolumns,
each containing nh minicolumns, eq. 4.15 can be written as:
nh H
P(xhi , y j )
πxhi
(4.17)
log P(y j |x1...n ) = log P(y j ) + ∑ log ∑
i=1 P(xhi )P(y j )
h=1
However, in our spiking neural network, it is possible to consider a network
topology without hypercolumns, or else that it consists of a single hypercolumn for each state and action population. In the latter case, the normalisation
89
is guaranteed. However it has to be a separate mechanism implemented for
the action population. Additionally, it has been suggested that the sum of the
contributions from H hypercolumns can be approximated by one term, hence
removing the h index. This condition considers that it is statistically unlikely
that a specific hypercolumn would receive inputs from more than one other
hypercolumn (Tully et al., 2014), given the sparse connectivity in conjunction
with the number of possible hypercolumns in the cortex and the number of
synapses per neuron. Alternatively, a single minicolumn can be made active
within a hypercolumn, by enforcing WTA. Therefore, all this leads to the simplification of eq. 4.17 where a single element coding for the dominant feature
replaces the sum over all the minicolumns activities. It is possible to define
the support value s j as the sum of all the N = Hnh contributions for y j with
weights wxi y j and bias β j :
N
s j = β j + ∑ πxi wxi y j ,
β j = log P(y j ),
i=1
wxi y j
P(xi , y j )
= log
P(xi )P(y j )
(4.18)
Finally, a normalisation of the support values using an exponential transfer
function furthermore returns the corresponding posterior probabilities.
We will now detail how the probabilities in eq. 4.18 are estimated from
the activity of spiking neurons. The spike trains are transformed into traces
by exponentially weighted moving averages (EWMA). As new information is
learned, old memories decay and get gradually replaced by the most recent
evidence. A three-staged EWMA is performed on the spike trains of the pre- i
and postsynaptic j neurons. Two stages are needed in order to obtain the joint
activity of the neurons based on the first EWMA. The addition of an intermediary trace enable learning in situations with delayed reinforcement (Tully et al.,
2014). The pre- Si and postsynaptic S j spike trains are described by summed
i (sp = 1, 2, · · · )
Dirac delta pulses with respective spike times t i and t j where tsp
are firing times of neuron i:
i
j
Si (t) = ∑ δ t − tsp
, S j (t) = ∑ δ t − tsp
(4.19)
sp
sp
Zi and Z j , the traces with the fastest dynamics, i.e. their time constants τzi
and τz j are the shortest, are defined as exponentially smoothed average of the
spike trains:
τzi
dZi
Si
=
− Zi + ε,
dt
fmax ∆t
τz j
dZ j
Sj
=
−Zj +ε
dt
fmax ∆t
(4.20)
which low pass filters the pre- and postsynaptic activities with the defined time
constants. fmax and ε define the higher and lower bound, respectively, of the
90
firing rate, representing the maximal certainty and doubt, respectively, in the
presence of the feature coded by the associated neural population. Firing rates
within that range represent the estimated probability. Each spike event had
a duration of ∆t = 1 ms. Based on the Z traces, the E eligibility traces are
computed, and a new equation is introduced to take into account the coincident
activity of the Z traces:
τe
dEi
= Zi − Ei ,
dt
τe
dE j
= Z j − E j,
dt
τe
dEi j
= Zi Z j − Ei j
dt
(4.21)
τe is the time constant for these E traces. Next, the P traces are EWMA of the
E traces with the slowest time constant τ p :
τp
dPi
= κ(Ei − Pi ),
dt
τp
dPj
= κ(E j − Pj ),
dt
τp
dPi j
= κ(Pi j − Ei j ) (4.22)
dt
Ultimately, the P traces are used to compute wi j and β j , from eq. 4.18:
β j = log(Pj ),
wi j = log(
Pi j
)
Pi Pj
(4.23)
Fig. 4.1 shows the evolution of the traces, weights and bias in a toy example featuring a pre- and a postsynaptic neuron.
The different trace dynamics can be related to biological processes. The
fast time constant of Z traces could be linked with rapid Ca2+ influx via ion
channels. The E and P traces could be accounted by downstream cellular
processes depending on the intracellular Ca2+ concentration and by gene expression and protein synthesis, respectively. The bias value is implemented
in the neuron model as an activity-dependent current, modifying its intrinsic
excitability.
A feature of the dual pathway implementation in our model of the BG is
the possibility to compute odds ratio, which are often used in decision making. Here it corresponds to the ratio of the probability of selecting one action,
that is its D1 pathway promotion, over the probability of this action being
avoided, that is the corresponding D2 pathway inhibition. We have not investigated the potential of such computations in this work but log-odds ratio have
been mapped to membrane potential of neurons (Buesing et al., 2011) and it
has been shown that spiking neurons could estimate log-odds ratio (Deneve,
2008b).
Finally, one of the BCPNN characteristic is that weights can alternate from
positive to negative values, and vice versa, depending on the correlation of the
activity between the pre- and postsynaptic units. Even if the release of excitatory glutamate and inhibitory GABA from a single axon terminal has been
91
Figure 4.1: Example of the evolution of the BCPNN traces, weight and bias in
a simulation with a pre-, i (blue traces on the left column), and a postsynaptic, j
(green traces), neuron. Red traces represent the co-activity of these neurons. κ is
initially set to one, allowing the development of the P traces and of the weight wi j
and bias β j . When the traces of the neurons overlap, attesting some correlated
activity, wi j increases. At t = 750 ms, κ is set to zero, effectively freezing the
update of the P traces, weight and bias, but not of the Z and E traces.
92
Figure 4.2: Schematic representation of a possible mapping onto biology of
the BCPNN weights, where the weights here represented do not change sign.
The minimal configuration requires only plasticity on the weight w pre,post , with
spontaneous firing from the inhibitory neurons. Alternatively, it is possible that
all the weights could be plastic. In the middle ground of this spectrum, both
w pre,post and w pre,inh could be plastic and could decrease to zero.
recently reported in biology (Root et al., 2014; Uchida, 2014), it is still considered as an uncommon property. A suggested option is thus to either consider
the weights as not being specific to a neuron, but instead to represent a module
involving both excitatory and disynaptic inhibitory connections, or restrict the
use of the weights to positive values only. In the former suggestion, positive
weights would represent a net excitatory effect of the sum of the excitatory
and inhibitory input to the projecting neurons (fig. 4.2). This can be achieved
through various setups. One is to assume a spontaneous firing of the inhibitory
interneuron, where a negative weight of the BCPNN would imply a lower excitatory component than this baseline inhibition. One caveat of such implementation is that, in order to represent a zero BCPNN weight, the excitatory
contribution from the presynaptic neuron has to equal to the inhibition that the
postsynaptic neuron receives from the interneuron. Alternatively, one could
assume plasticity of both the w pre,post and w pre,inh . Each of them could decrease to zero, representing the deletion of the synapse or a way to inactivate
it. With regard to the BG, this would correspond to cortico-striatal connections, with presynaptic cortical neurons, postsynaptic MSNs and fast-spiking
interneurons providing the inhibition.
4.4
Learning paradigms used
We will here describe the tasks on which the models are tested. We will first
present a basic reinforcement learning task, successive learnings, which is sim93
ilar in all our models and works, before mentioning related tasks. We will then
detail delayed learning, which we only test in the spiking version of the model.
4.4.1
Common procedures
A simulation typically consists of several blocks, themselves made up of several tens of trials. Within a block, the reward mapping is held constant and
there is usually only one action for each state that leads to the reward. The
system has to first find the correct action for each state, but then, as the reward
mapping changes, it has to learn to stop selecting the previous correct action
to then discover the new correct one. For example, in the spiking model which
comprises three states and three actions (section 5.1), a reward is obtained
when the model, in state i, selects the action j that verifies:
((i + b) mod a) ≡ j
(4.24)
where a is the number of actions, here a = 3, and b is the block number.
Based on the activity of the output layer, a selection is made through a
softmax function. The outcome is computed with the equation above, eq. 4.24,
and the difference between this value and the expected reward, the RPE, is
conveyed to all dopamine-dependent synapses.
The same protocol is applied for reversal learning but there b is replaced
by b mod 2. In effect, the reward mapping alternates between the two same
configurations.
Reacquisition after extinction consists of a first acquisition of a reward
mapping, that is during the first block, while no reward at all is given during
the second block. The length of this block can vary in order to assess if the
length of the extinction has a effect on the reacquisition. Thus, in the third
block, rewards are again delivered and the reward mapping is the same as in
the first block.
In probabilistic reward learning, or multi-armed bandit tasks, the reward is
not always delivered for correct trials. Furthermore, several actions per state
can lead to a reward but with different probabilities. This experimental setup is
often used with animals, in conjunction with a block-dependent reward mapping.
4.4.2
Delayed reward
The delay refers to the time between the activity of the neural population coding for the action that has led to the obtention of the reward, and the delivery
of the reward. Spikes are by nature very short temporal events and thus a
memory of the activity is required. A mechanism that allows for learning in
94
this situation is also involved in secondary conditioning. Through the use of
temporal traces, as mentioned in the previous section (4.3.4), it is possible to
enable the overlap of the traces of the state and of the action with the reward
signal, e.g. the phasic change of the dopaminergic neuron activity. There is
however a chance, scaling with the delay, that in the interval, other neural populations become active and would thus also have their traces overlapping with
the reward. The correct attribution is therefore complex, and is called the distal
reward, or temporal credit assignment problem (see section 2.3.3.4 and Izhikevich (2007)). BCPNN learning can deal with delays by keeping a memory of
the activity in the E traces. Associations can be made until their relative traces
have decayed. Similarly, the Z traces of the pre- and postsynaptic neurons need
to overlap in order for the Ei j trace to pick up the joint activity. As the traces
decay with time (fig. 2.3), the strongest ones are related to the most recent
firing. Therefore, when the reward occurs, all the non-zero traces of the states
and actions temporally close enough to the reward will be linked to it, increasing the probability of selecting these same actions in the given states, with the
closest being the most strongly associated. Through trial and error, similarly
to TD learning, the model should eventually find the responsible state-action
pair that causes the reward, after having tested out all the other pairs occurring
in between.
95
96
5. Results and Discussion
In this chapter we will present and discuss some of the results of our works,
including our models. We will consider specifically the implication of these
results with regard to the biological data and hypotheses mentioned in section
3.3, and to other theoretical frameworks. Additionally, we will also introduce
results from unpublished works. As a note, in papers I, II and III, the Go, direct
and D1 pathways represent in fact the same concept, and this is also the case
for the NoGo, indirect and D2 pathways.
5.1
Implementation of our models of the BG
We will here present the models used in the papers, through their common
features, while focusing on the more complex implementation of the spiking
network. We will now bring together the information previously exposed. The
description of the model will thus mix theoretical and biological denominations. Additionally, we will briefly describe what happens in the models during
a trial.
5.1.1
Architecture of the models
The models are basically composed of three pathways, with plastic connections using the BCPNN learning rule in each of them. The different states,
Nstates , and actions, Nactions , are coded by different subpopulations of neurons.
In the spiking model, within a subpopulation, all neurons code for the same
representation, e.g. the same action or the same state. It is the equivalent
of a unit in the abstract model. A population is defined as the union of the
subpopulations of the same kind, e.g. all the action subpopulations.
Let us first describe two out these three pathways, the D1 and the D2 ones,
they are used for the action selection, as commonly described in biology. They
both originate from the striatum, and specifically from the matrisomes. They
differ on the dopamine receptor type that the MSNs, from which they both
stem, express: either D1 or D2 (see section 3.3 for a description of the biology).
In relation to biology, the striatal MSNs in the D1 and D2 pathways are, in our
model, part of the matrix and are involved in the action selection, whereas
97
striosomal MSNs are involved in the RP.
Activity in the D1 pathway increases the probability of selection of the related action, whereas activity in D2 would prevent it (fig. 5.1). The different
structures of the BG are here abstracted to the hypothesised functional level in
a two layer network, thereby simplifying the polysynaptic projections of disinhibition (D1 pathway) and of the dis-disinhibition of excitatory neurons (D2
pathway). Here, the abstract model and the spiking network differ, as in the
former, the D1 and D2 pathway converge onto the same unit, whereas there exists separate D1 and D2 populations in the latter, whereby all actions are coded
twice, once by each D1 and D2 population. In this setup, the convergence occurs in an output layer which preserves the topology of the previous layer, and
receives inhibitory and excitatory inputs from the D1 and D2 populations in
striatum, respectively. It thereby corresponds to the GPi/SNr.
The third pathway, the RP pathway, computes the expected reward, specifically for each state-action pair. In this pathway, plastic synapses connect the
state-action pairs coding subpopulations to the RPE coding population, here
the dopaminergic neurons. There are Nstates ∗ Nactions subpopulations coding
for all the possible state-action combinations in the RP pathway. Therefore,
each state connects to Nactions subpopulations, each of them coding for a different action but for the same state. Similarly, the information about the action
is sent for each action to the Nstates possible states coded in the RP pathway
(fig. 5.2). In the D1 and D2 pathways, a subpopulation represents one action and we associate it to a matrisome, but in the RP pathway it codes for
a specific state-action pair. A striosome is here defined as regrouping all the
RP subpopulations coding for a common action. The number of striosomes
therefore equals the number of actions in the model, Nactions . We have thus
assigned the RP pathway to the striosomo-nigral pathway. The RPE is simply
the difference between the inhibition received from the RP pathway and the
excitation triggered by the reward.
The principle, shared by the abstract model, is to increase the relevant D1
weights, which are the ones from the current state to the selected action, when
the obtained reward value is superior to its expected value, RPE>0, and at the
same time to also increase the weights from the associated active state-action
pair to the RPE coding population in order to adjust the prediction for the next
occurrence of the situation. Conversely, the D2 weights should be increased
if less reward than expected is delivered, RPE<0, as the weights in the RP
pathway should be decreased to improve the estimated reward when in the
same conditions. Once the reward is fully expected, no updates take place as
the RPE equals zero, preventing any modification of the P traces, and therefore
of the weights and biases.
Our implementation of the BCPNN learning rule in a BG model shares
98
Figure 5.1: Schematic representation of the model with respect to the biological
structures mapped. For example, action ‘A’ is coded twice in the matrisomes,
by both MSN D1 and MSN D2 subpopulations. These MSNs both project to a
subpopulation also coding for action ‘A’ in the GPi/SNr. The selection is done in
this layer, based on the activity of the different action coding subpopulations. In
the RP pathway, subpopulations code for specific state-action pairs, such as state
‘1’ and action ‘A’. The RPE is however non specific and affect all the plastic
connections.
99
similarities with TD implementations and Actor-Critic models in reinforcement learning. The purpose of the D1 and D2 pathways is to select an action
based on action values, and these pathways therefore endorse the role of the
actor, while the striosomo-dopaminergic nuclei loop computes the RPE, which
is comparable to the TD error, and can therefore be seen as the critic. However,
the difference lies in that the values in our model result from BCPNN computations and are thus derived from the statistics of activation and co-activation
of the neurons. In that way, the values do not represent estimates of future
rewards, but probabilities of the postsynaptic neuron to be active given that
the presynaptic one is active, for the D1, D2 and RP pathways. In our model,
the value function of the latter relies not only on the state, but also takes into
account the action selected to emit a prediction based on this more precise
information. The actual selection is done through a softmax process on the activation in the output layer, the GPi/SNr for the spiking model, and the action
layer in the abstract version.
The RPE, even if it is specific to the particular state-action pairing, can
affect all the dopamine dependent plastic connections. The update of the
weights thus depends on the value and sign of the RPE, but also on the type of
dopamine receptor expressed by the neurons, and on the activity of the pre- and
postsynaptic neurons. The RPE is used for the modification of the strengths of
the connections of the D1, D2 and RP pathways.
Here, κ in eq. 4.22, is substituted with the RPE as the learning rate. The
updates of the P traces, used for the computation of the weights, in the different
pathways are dependent on the sign of the RPE and on the dopamine receptor
type expressed by the matrisomes.
Now we will specifically detail the computation of the RPE and its impact
on the updates in the spiking model. The weights of the D1 and D2 pathways
are updated when RPE > 0 and RPE < 0, respectively. However, the weights
of the striosomo-nigral connections are updated irrespectively of the sign of
the RPE. The dopaminergic neurons are driven to fire at baseline level in the
absence of inputs from the RP pathway or from the external reward information. At such baseline activity, the resulting RPE is thus set to be equal to zero
(eq. 5.1). The relative lack of data on the biological substrate of the critic, i.e.
the RP pathway, has led us to keep a relatively abstract implementation of this
circuit, with the goal to investigate more its implication in the performance.
The RPE is defined as:
RPE = κ = (σdopa (βdopa + q))λ
(5.1)
where q is the filtered trace of the spike activity of the dopaminergic neurons,
hereby acting as a proxy for the dopamine level in the model. βdopa acts as a
bias to shift the RPE to zero at the normal tonic activity of the dopaminergic
100
neurons (≈ 10Hz). q evolves following:
τq
dq
dopa
)−q
= δ (t − tsp
dt ∑
sp
(5.2)
where t dopa are the spike times of the dopaminergic neurons. τq is the time
constant for the trace, σdopa and λ are the gain and the power. We used an odd
number for λ in order to keep the information about the sign in matrisomes
as it is critical to determine the localisation of the plasticity in the pathways,
and an even number λ for striosomes. These computations are done using
the volume transmitter implementation in NEST, which enables the synaptic
plasticity to be dependent on a non-local neuromodulatory signal, through the
integration of spikes from a population of neurons, here the dopaminergic neurons, connected to it (Potjans et al., 2010).
Depending on the action selected, the trial might lead to a reward. For
example, in the spiking model, a correct selection leads to a transient increase
of the external stimulation of the dopaminergic neurons, whereas an incorrect
one triggers a transient decrease of this stimulation.
Now, in the abstract version of the model, when RPE<0 or RPE>0, the
D1 or D2 weights, respectively, between the units coding for the active state
and the selected action are decreased. In order to obtain a decrease between
co-active units, or an increase between units without correlated activity, the
activation vector of the actions of the relevant pathway is changed to its complementary, effectively activating the otherwise silenced other action coding
units, and setting to 0 the unit coding for the selected action. The spiking implementation of the learning rule proves to require non-trivial modifications
to be able to compute complementary traces of activation, which would be
used instead of the original, ‘real’, traces of activation of the neurons in the
situations just mentioned.
Both models also uses an efference copy which increases the firing rate of
the D1 and D2 subpopulations coding for the selected action, while the others
are inhibited. This occurs as soon as an action gets selected. The efference
copy helps the pre- and postsynaptic traces to overlap and also happens in the
abstract version where the selection produces binary vectors of the activity
in the action layer. At the point when the system knows the state and the
action, the expected reward can therefore be computed in the RP system. In the
spiking version, a specific striosomal subpopulation gets active and represents
the RP for the current state and selected action. This results from their input
connectivity (fig. 5.2). Each striosomal subpopulation receives inputs from
one state and one action, via the efference copy, in a way that it would fire
only if both of its inputs are active at the same time.
101
Figure 5.2: Schematic representation of the RP setup. Each striosomal subpopulation receives inputs form a single state and from a single action. In order to become active, it needs to have both of its inputs active at the same time, therefore,
only one subpopulation at a time can become engaged in the RP. A striosome,
here shown by dashed grey lines, comprises all the subpopulations coding for
the same action. In italics are the supposed biological substrates of the features
specified. Here the toy example considers three colored states where the same
three actions can be selected.
102
5.1.2
Trial timeline
We aimed to reproduce experimental protocols by testing our models on blocks
of trials. A trial starts by setting one state subpopulation active (see fig. 5.3
for a representation of the activity of the network during a trial). Through
the D1 and D2 pathways, the information is conveyed to all the action coding
subpopulations.
Then comes the actual selection, which relies on the activation of the action
coding subpopulations at the convergence of the D1 and D2 pathways.
In the spiking network, as connections from D1 MSNs to the output layer,
the GPi/SNr, are inhibitory, we first need to invert the softmax distribution, as
the action associated with the highest probability of being selected is the one
coded by the GPi/SNr subpopulation with the lowest activity.
Once the action has been selected, the efference copy increases the activity
of the D1 and D2 MSNs coding for that action, while suppressing the others.
Additionally, it sends excitatory inputs to the relevant striosome, where the
subpopulation which also receives activation from the current state becomes
active.
Conveniently, the output of the active RP subpopulation is delivered to
the dopaminergic neurons simultaneously with the outcome of the trial. The
difference between this RP and the actual reward value, i.e. the RPE, computed through the phasic firing rate of the dopaminergic neurons or offline
in the abstract version, is then available to all the plastic dopamine dependent connections: the cortico-D1 and -D2 matrisomal ones and the striosomodopaminergic nuclei ones.
There is no delay in the updates of the weights, as soon as the RPE differs
from zero, the relevant pathways are affected. In the spiking model, we set a
resting time after the reinforcement, where only background activity is fed to
the network, in order for the traces of one trial to not overlap with those of the
next.
5.1.3
Summary paper I
We used the abstract computational model of the BG to investigate the performance of various configurations of this model in action selection. Specifically, in one of these configurations (Actor+RP), the RP associated with each
action was added to the activation value of the actions before the selection.
We also tested versions of the model without the D1 or D2 connections, as
well as a configuration where the selection was made only based on the RP
associated with the possible actions. We first demonstrated that in a simple
successive learning task with the standard model, the D2 pathway was responsible for suppressing an action which does not lead to the reward anymore, for
103
example after a change of the reward mapping, and that this enables the D1
pathway to then promote the correct action. Furthermore, the RP system was
able to learn to predict the reward, which led to a RPE of 0, thus stopping all
the weight updates. We then experimented with various configurations of different reinforcement learning and conditioning tasks, such as simple acquisition, reacquisition after extinction, successive learnings, reversal learnings and
probabilistic reward learning. Basically, we found that the standard (Actor)
and the Actor+RP versions showed the best performance in these tasks. The
model based only on the RP seemed to be particularly effective during reacquisition. We additionally set up an equivalent task to an experimental study with
monkeys (Samejima et al., 2005). This study looked at how the probability
of pressing one or the other lever, left and right, depended on the probability
of getting a reward following these choices. The standard version exhibited
similar results as the experimental data, whereas the Actor+RP configuration
seemed to have better performance for low probability choices. We suggested
that an agent could thus adapt on-the-fly its mode of selection depending on
the situation.
5.1.4
Summary paper II
Based on the same abstract model as for paper I, we simulated the effect of optogenetic stimulations by transiently increasing the activation of the targeted
unit or units, just before the selection. We only used the Actor and the Actor+RP configurations. Specifically, we wanted to first test if the model could
reproduce the data from the experimental study of Tai et al. (2012) where they
could bias the selection of mice in a probabilistic reward two-choice task, left
or right, using optogenetic stimulation of D1 or D2 MSNs in the right or left
hemisphere, during decision-making. We were able to calibrate the intensity
of the delivered activation to get similar shifts in the selection as experimentally reported. We then tested the two configurations of the models in the
probabilistic task. In the Actor+RP configuration we additionally increased, or
decreased, the RP associated with the action selected when the targeted MSNs
were of the D1 or D2 type, respectively. The biases of the selection approached
closely those observed with the mice, that is that the biases differentially impacted the selection depending on the recent reward history. The shifts were
the most prominent when there had been inconsistency of the rewards in the
recent trials. In a third part, we investigated the impact of a transient increase
of the RP only, on the selection. This was sufficient to modify the subsequent
selections.
104
Figure 5.3: Raster plot of the spiking model consisting of 3 states and 3 actions,
illustrated over 30 seconds of activity during a change in the reward mapping. In
A, a single trial is detailed. In A and B the states (blue), D1 MSN (green), D2
MSN (red) and GPi/SNr (purple) populations, grouped by representation coding,
are shown. The indices of the states and actions begin from the top, e.g. neurons
with an ID between 160-220 represent the D1 and D2 subpopulations coding for
action 1. In C are shown a raster plot and an histogram of the dopaminergic
neuron activity. The width of the bins is 10 ms. A trial lasts for 1500 ms and
starts with the onset of a new state. The vertical orange dashed line signals a
change in the reward mapping. From paper III.
105
5.1.5
Summary paper III
This implementation of the standard abstract model with spiking neurons also
led to develop the network into a more biologically plausible representation of
the BG. Its main features are the D1 and D2 pathways, which disinhibits or
inhibits, respectively, the output nuclei GPi/SNr where the selection is made,
but also the RP pathway with the dopaminergic neuron activity coding for the
RPE, which modulate the synaptic plasticity (section 5.1.1). The activity of
the network during a trial is in accordance with biological data (fig. 5.3). The
model performs well in successive learning tasks, and shows similar dynamics as the abstract implementation. We additionally simulated various lesions
of the aforementioned pathways as well as the degeneration of the dopaminergic neurons observed in PD. Among the various conditions, it is notable
that a lack of the D2 pathway causes worse performance than without the D1
contributions, and that without the RP pathway, the system still learns quite
well but the dynamics of the weight updates are suboptimal. The simulated
dopaminergic neuron depletion triggers both modifications of the evolution of
the weights and a decrease in the performance which scale with the extent of
the depletion. Finally, we suggest that it is the disruption in the D1 pathway
that predominantly disrupts the learning performance observed in PD patients.
5.1.6
General comments
The basic architecture is similar between the two versions of the model (for
descriptions, please refer to the respective papers, I and III, and to section
5.1.1). A comparison of the evolution of their weights and of their performance
during a learning task attests to this similarity (fig. 5.4).
The abstract and spiking versions offer some complementarity. The abstract model allowed us to easily implement the RP in the selection, while the
spiking implementation provided the opportunity for more biologically plausible simulations such as the lesioning of pathways or neuronal depletion.
An advantage of using the BCPNN learning over action-value based models of reinforcement learning is that there is no need for the maintenance of the
previous action or state value to compute the new value. This occurs naturally
through the update of the traces and of the weights.
Going back to the reported modification of the intrinsic excitability of the
MSNs by dopamine (section 3.3.4), a convenient way to implement such characteristic in our model would be through the bias term β j , which can be seen
as an intrinsic excitability variable of the neuron model (Tully et al., 2014).
Additionally, the implementation of a dopamine-dependent dynamic threshold, as suggested by Bahuguna et al. (2015), would further help to incorporate
reaction times in the model. There are two ways to increase the learning speed
106
Figure 5.4: Weights and performance of the abstract, left column, and spiking,
right column, models in a successive learning task with six blocks. The abstract
model consisted of 10 states and 5 action and had blocks of 200 trials, the spiking
model of 3 states and 3 actions with blocks of 40 trials. Panels A, B, D and E
show the Go/D1 and NoGo/D2 weights from state 1 to all the actions. In C and
F, the moving average of successful trials over the last 10 trials is represented.
In C, the RPE for the abstract model is displayed in red, and not represented for
the spiking version. Black dots represent the average value of the weights. These
results come from a single simulation of each model. Left column is from paper
I.
107
in our model. One is to augment the RPE, for example by amplifying the
firing rate of the dopaminergic neurons for a reinforcement. The second one
is to augment the correlation of the pre- and postsynaptic populations. This
could be related to the modification of the intrinsic excitability of MSNs by
dopamine.
Considering the model-based and model-free distinction, it seems that performing action selection only through model-based representations might prove
to be time-inefficient and computationally taxing. Model-free selection enables quicker and simpler decisions, especially when some habituation has
been formed, while the BG still allow to adapt to changes in the environment
(Dolan & Dayan, 2013; Doll et al., 2012). It has been hypothesised that both
computations could be performed in the striatum, with complementary roles
from the dorsolateral and dorsomedial striatum, along with the ventral striatum (Daw et al., 2011; Khamassi & Humphries, 2012). However, in an fMRI
study, Doll et al. (2015) reported a correlation between the activation of the
putamen and model-free prediction errors whereas it was negatively associated with neural prospections, that is the neural substrate of the states planned
to visit, which is linked with model-based behaviours. The underlying biology
of these representations is still unclear. The lateral PFC and the intra-parietal
sulcus have been described to exhibit the neural signature of a state prediction
error, assessing the difference between the state computed from the modelbased representation and the observed state (Gläscher et al., 2010). It thus
seems that computational models can prove to be useful to suggest and to test
hypotheses about these representations.
Outside the scope of this thesis is the decision making process, defining
the current state, and which most likely involves cortical interactions similar
in nature to the standard BCPNN description with hypercolumns and attractor
networks, for which computational models have shown good results in associative learning and pattern completion (Lansner, 2009; Lundqvist et al., 2006;
Meli & Lansner, 2013; Sandberg et al., 2000).
The switch from the abstract model to a spiking implementation resulted
from the will to increase the biological plausibility of our model, in order for
its predictions to better suited to experimental assessment. It can be noted that
the learning rule implemented does not rely on very precise spike timings, and
that rate coded activity could have be sufficient. However, as mentioned, our
goal was not only to show that it could work, but to provide a model that could
offer a good match to biological data. It furthermore now allows for interesting
developments of the model where precise timings and subthreshold activity
are important. We can mention that the spiking BCPNN rule can approach
standard STDP shape where the precise spike timings are relevant (Tully et al.,
2014). Additionally, one of the main reason to implement our model with
108
spiking neurons, and to specifically use NEST and PyNN, was to be able to
run the model on neuromorphic hardware developed in the European project
‘BrainScaleS’, in which we were involved.
The development of the spiking model confronted us with various challenges. Some of them called for biological data which were usually either
conflicting or absent. These steps of the implementation proved to be very
useful in determining the information needed, and also offered us the possibility to assess and implement hypotheses about circuitry and functionalities.
Our four factor learning rule can account for a variety of learning conditions, similarly to the spike timing dependent eligibility rule detailed by
Gurney et al. (2015). However, it still depends on only one neuromodulator, dopamine, whereas it is known that the BG contains many more, e.g.
serotonin, acetylcholine, noradrenaline and noripinephrine (Carli & Invernizzi,
2014; Doya, 2008; Doya et al., 2002).
5.2
Functional pathways
One of the main interest in this thesis was to determine the functional relevance of some of the pathways in the BG. We investigated this by simulating
the removal or the silencing of such pathways, as well as of some of other
properties, such as spontaneous firing, in reinforcement learning tasks. We
also simulated the effect of loss of dopaminergic neurons, as reported in PD.
This will be further detailed in section 5.5.
5.2.1
Direct and indirect pathways
The activity of the MSNs in our spiking model shows that both D1 and D2
MSNs fire during the selection phase (fig. 5.3), as it has been reported in mice
(Cui et al., 2013b; Tecuapetla et al., 2014). Related to probabilistic learning,
as in the multi-armed bandit task, it has been suggested that the arbitration
required to respond to a high-conflict decision, where the D1 and D2 MSNs
coding for a similar action are both active, could involve interneurons and
could explain longer reaction times (Bahuguna et al., 2015). Furthermore, the
firing dynamics of the neurons in the output population of our model during
selection seem to correspond to data obtained in monkeys during learning. A
decrease in activity enhances exploration whereas an augmented activity in
the GPi/SNr is associated with restricted selection and increased exploitation
(Sheth et al., 2011).
However, in order to improve the biological plausibility, we restricted the
weights of the D1 and D2 pathways to positive values, i.e. to be excitatory only.
This does not affect dramatically the performance, but it however requires the
109
implementation of lateral inhibition between subpopulations of MSNs featuring the same dopamine receptor type. This compensates for the loss of inhibition resulting from the absence of negative weights. The implementation
of inhibitory interneurons (section 3.3.1) should give even better results as it
should offer a better mapping of these negative weights.
Following a change of the reward mapping, the dynamics of the weights
exhibit a critical initial involvement of the D2 subpopulation coding for the
action which was the correct one for the previous block. This is similar to the
observed changes in firing rates in the striatum in rats during learning (Kimchi & Laubach, 2009). Additionally, this relates to the improved ability of
monkeys who have the highest D2 receptor availability to reach criterion in a
reversal learning task (Groman et al., 2011). This is even more important for
the spiking model as with the absence of change in the D1 pathway until the
RPE becomes positive, this suppression from the D2 pathway is the only way
for the system to switch its selection. Once the correct action has been selected,
the weights from the active state subpopulation to the related D1 subpopulation increase as those to the other D1 subpopulations decrease. Eventually, as
the RPE diminishes to zero, the amplitude of the change of the weights does
so too.
The biases are not represented as they offer little information in this particular setup. With the reward mapping and the cyclic occurrences of the states,
which thereby call for a similarly cyclic selection of the actions and of the RP
populations, the bias values are similar between subpopulations. In less controlled environments, the biases would differ and would add variability in the
selection, by enhancing the selectability of the already most frequently selected
actions (section 4.3.4).
In the abstract model (paper I), the removal of the Go pathway often leads
to poorer performance than the removal of the NoGo pathway. However, in the
spiking version, the results are the opposite, the condition without the D1 pathway (noD1) performs a lot better than the one without the D2 pathway (noD2).
As explained in paper III, this results from the absence of complementary activation of the subpopulations in the spiking models, where such complementary
activation is implemented in the abstract model. This enables the decrease of
the weights between co-active units, such that weights are updated in all the
pathways without restriction from the sign of the RPE.
The results from the spiking version can be supported by experimental
data. Mice with D2 receptor knock-out (D2R-KO) have been reported to perform significantly worse than D1R-KO mice, both in trial duration and success
ratio in a reversal learning task (Kwak et al., 2014). Besides, it has been shown
that the number of available D2 receptors in the striatum can be an indication
of the performance during the reversal phase of reversal learning, but not of
110
the initial acquisition or of the retention (Groman et al., 2011).
In the simulations of optogenetic stimulation (paper II), only two actions
are represented, going left or right, and are respectively coded by D1 and D2
units in the contralateral side. The simulation of optogenetic activation is represented by an external transient increase of the action value of the targeted
action coding units, i.e. the D1 or D2 unit in the left or right hemisphere. We
also tested the impact of an artificially augmented RP in the plasticity of all the
weights and in the subsequent selections. Due to the left/right lateralisation of
the actions, the activation of action units in the D1 or D2 pathway impacts the
choice of the side. However, as Tai et al. (2012) stressed in their experimental
study, the technique could not elicit an activity in what would be a subpopulation of matrisomal MSNs, if we transpose the terminology used in this thesis
to their study. Therefore, the selection bias towards the contralateral side of a
stimulation of all D2 MSNs in one hemisphere should not be seen as indicating that D2 MSN activation leads to the selection of an action. Such massive
activations probably do not occur under normal conditions in the brain. It has
indeed been suggested that activity in the D2 pathway might be required only
to inhibit actions that could prevent the selection of the desired output, and not
of all the possible other options (Baladron & Hamker, 2015). Amemori et al.
(2011) supposed that the indirect pathway could be involved in the selection
of a specific action module, and the direct pathway would thereby select one
action within that module. This relates to the surround-inhibition hypothesis
of the indirect pathway suggested by Mink (1996). It would indeed allow for
non-competing actions to be performed simultaneously, and would probably
be more energy efficient.
Investigating the impact of the spontaneous firing observed in the GPi/SNr
was an indirect way to asses the role of the D1 and D2 pathways in the selection. This spontaneous firing seems to enhance the relevance of the D1
pathway (fig. 5.3). In the intact spiking model, high activity in the D1 pathway means a lot of inhibition is sent to the GPi/SNr. It is thus possible for a D1
subpopulation to completely silence its associated subpopulation in the output
nuclei. Without spontaneous firing (noSF), as the D1 MSNs project inhibitory
connections, there would be no change in the activity of these output nuclei.
Thus, the selection would be random, unless this inhibition can have an impact
by suppressing the excitation from the D2 pathway. However, by itself, the D1
pathway would not be able to impact the selection without spontaneous firing
in the output nuclei. Fig. 5.5 shows that the noSF condition performs as well
as the standard intact model in the first part of the blocks, which depends a
lot on the D2 pathway, which is unaffected by the noSF condition. Even so,
this condition fails to improve as much as the intact one during the second half
of the blocks, which relies on the promotion of the correct action by the D1
111
Figure 5.5: Box plot of the mean success ratio and standard deviation of the
examined conditions. In A, the first 20 trials of each block were used whereas in
B, the analysis was carried out on the last 20 trials. Data from the last 7 blocks
of the PD conditions were used. All differences are significant (p<.0001) unless
stated otherwise (ns = non-significant). The horizontal dotted line represents
chance level. For all conditions except PD33, PD66, noD2 and no Efference,
differences within conditions between the first and last 20 trials are significant.
NoSF stands for the condition without spontaneous firing of the GPi/SNr output
nuclei and noLI for the condition without lateral inhibition in the striatum. PD16,
PD33 and PD66 display the results of the 7 blocks following the deletion of
respectively 16%, 33% and 66% of the dopaminergic neurons. From paper III.
112
pathway.
5.2.2
RP and RPE
We will here first present some results related to the RP pathway and to the
RPE. Then we will discuss which role the RP pathway can have in the selection
and how it can be mapped to biology.
Both the abstract and the spiking version of the model are able to learn
to predict the reward, in a successive learning task. This means that the RPE
becomes zero, thus resulting in the freezing of the weights (fig. 5.3 C).
We suggest in paper III that a negative RP, e.g. coding for pain, could be
conveyed by striosomal D2 MSNs onto dopaminergic neurons, possibly via
LH, making an indirect pathway, whereas the positive RP would be sent from
striosomal D1 MSNs onto GABAergic interneurons in the dopaminergic nuclei, representing a direct pathway. This would assume a sort of spontaneous
firing of the interneurons in the dopaminergic nuclei, for their inhibition to
trigger an increase in the activity of their target dopaminergic neurons. Additionally, we propose that dorso-striatal striosomal MSNs could be involved in
the selection, supposedly via the reported projections from striosomes to the
GP and the re-entrant cortico-BG-thalamus loops (sections 3.3.1 and 3.3.2).
Functionally, a reward predicting event, a CS, should have two effects in
the RP system, in conformity with the TD learning models presented in the
first part of this thesis (section 2.3). One is to generate a positive RP, a phasic
increase of dopamine, a CR, in order to associate statistically relevant previous events to the eventual reward, US. The second one is an inhibition of the
dopaminergic neurons at the time of the expected reward, or reward predicting event. Our model does not account for this, but it could be associated,
and implemented, with the previously described direct and indirect pathways
stemming from striosomes.
Interestingly, in a study recording the dopamine concentration in the nucleus accumbens in rats performing Go/NoGo tasks, it appeared that a reward
predicting phasic dopamine change occurs only at action initiation, and not
a the apparition of the reward predicting cue (Syed et al., 2015). This could
support our implementation of the state-action dependent RP. Additionally, the
authors noted a dip of the dopamine concentration right at the time of the initiation of a wrong action, e.g. going left when the cue indicates a reward on the
right lever. This could attest of an absence of the inclusion of RP in the selection, as there seems to be no point in doing an action which the animal knows
is linked with a negative RP. However, as we have mentioned, a softmax selection might produce this kind of apparently suboptimal pattern of selection, in
order to assert that the other option do not lead to even better outcomes.
113
Returning to the behavioural effect of the dopaminergic signal, it has been
shown that the optogenetic activation of VTA dopaminergic neurons, without
any other reward delivery, is sufficient for both the reactivation and the reversal
phases of operant behaviour (Adamantidis et al., 2011). However, this activation alone could not drive optical self-stimulation-like behaviour. It is possible
that the targeted dopaminergic neurons encode different dimension of the reward signal. There might be some uncoupling of the predictive value, which
enables n-ary conditioning, and of the reward signal, which acts as the confirmation of the prediction and is required for the synaptic change triggered by
the RP to be effective and to last. Therefore, in the study by Adamantidis et al.
(2011), it could be that the optogenetic activation of the dopaminergic neurons
is equivalent to the predictive value signal, but as no food is obtained, that is
no reward comes to confirm the prediction, the plastic changes are canceled,
or not consolidated.
In a previous study which used a similar methods, Tsai et al. (2009) were
able to elicit place preference in freely moving mice only via phasic optogenetic stimulation of VTA dopaminergic neurons. Based on the results from
our second paper, simulating optogenetic activation, we suggest our model
could be able to reproduce this place preference. Indeed, by considering the
states as representations of cells in a gridspace, and actions as various movements in that space, driving a dopamine increase at a specific localisation in
that gridspace will reinforce the actions that lead to it. In order for our model
to show a better match to the data, it would require the use of the eligibility
trace. In effect, this stimulation would act as a reward. Moreover, regarding
the effect on the behaviours of transient changes, excitation or inhibition, of
the dopaminergic neurons activity, the results from recent studies using optogenetics are in accordance with those from our simulations (Chang et al., 2015;
Hamid et al., 2015).
There might be two, at least, advantages for a biological system in the use
of the RPE instead of the absolute reward value. Firstly, it decreases the energy consumption required for the synaptic plasticity, as updates do not occur
once the reward is correctly predicted. Using the absolute reward value would
require updates each time the reward is obtained, even after the thousandth
time. Secondly, in a condition where plasticity would depend only on the reward value, associated with homeostasis, the modification of a synapse would
trigger an opposite effect at the others synapses (Watt & Desai, 2010), and as
they would occur every time the reward is obtained, this would lead to a much
faster decay of the connections and thus of memories, than what would result
from the use of RPE. Our models feature both mechanisms. As the RPE converges to zero, the plasticity is frozen and the system does not spend energy
to update the synapses and thus the memories are kept. This, in effect, is one
114
way to solve the stability-plasticity dilemma. However, it could happen that
the system learns to predict an absence of reward, or even a negative reward,
before it has selected all the possible actions. It would thus keep on selecting
a suboptimal option as the weights are not changed.
One of the results of the simulated optogenetic stimulation on the striosomes is that in this implementation of the RP system, the resulting RPE alone
is not enough to assert if the reward obtained was smaller, or if the negative reward had been stronger, in situations where the expectation has been increased
prior to the delivery of a positive or negative reward, respectively. Through
this, it shows the need for an additional pathway informing about the raw, absolute reward value in order to be able to differentiate such situations.
An initialisation of the weights in the RP pathway to low positive values
means that the system would expect some positive outcome from any actions
performed for the first time. Therefore, the RPE will be smaller if it indeed
leads to a reward delivery than if it leads to a negative reward of the same
absolute value as the positive reward. This optimistic a priori belief has been
suggested to behave like a probabilistic prior, where its influence gets reduced
with increasing experience (Stankevicius et al., 2014). Interestingly, this also
relates to the loss aversion observed in humans, which is the tendency for
losses to have a larger hedonic impact than comparable gains (Rick, 2011).
Reacquisition is the relearning of a previously learned and then extinguished association. The reacquisition is faster than the first time. In the
BCPNN, the bias, notably, via its role in the excitability of the neuron, could
account for this phenomenon. As the action is selected, the bias decreases, increasing the excitability of the neuron (section 4.3.4). The phenomenon would
therefore be observed as long as the bias has not decayed back to its initial
value. In paper I, we show that if the extinction phase is relatively short, these
reacquisition effects could also result from the incomplete decay of the relevant
weights and traces. Additionally, the inclusion of the RP in the selection is able
to help the system out of the aforementioned dead ends, where it has learned
to expect a negative reward and thus keep on selecting the wrong action. This
provides support to the usefulness of the RP in the selection.
By allowing the weights from the striosomes to the dopaminergic neurons
to become negative we wanted to capture the same idea as for the matrisomes,
i.e. a putative direct and indirect pathways onto the downstream target, the
dopaminergic neurons. For example, a negative weight in the RP pathway
would represent a negative RP, possibly mapped on striosomal D2 MSN connections to inhibitory interneurons in the SNc, or via the LH or the GP, where
such connections have been reported (Fujiyama et al., 2011) (section 3.3). Due
to the lack of data to clearly establish such pathways, we kept a relatively abstract implementation of this circuit, which is indeed similar to the abstract
115
model implementation of the RP pathway.
The role of striosomes has been suggested to provide the dopaminergic
neurons with state-related information, or state-based prediction (Fujiyama
et al., 2011). Even though we assume that the RP is based on both the state
and the action selected, we have tested the performance of the abstract model
where the RP was state only dependent or action only dependent. These setups
would be closer to the reinforcement learning models where the RP is based
on the average reward obtained, from a specific state. These versions work
well when only one action for each state leads to the reward. In the successive
learning task, due to the simple reward mapping assigning one specific action
for each state to the reward, the three different RP systems exhibit similarly
good results. In a multi-armed bandit task however, where several actions for
each state can lead to the obtention reward, but with different probabilities,
the performance of the state-based only RP deteriorates, as does those of the
action-based only RP.
Loops have been described from dorsal and ventral MSNs to dopaminergic neurons via GABAergic neurons in the SNr and in the VTA, respectively
(Chuhma et al., 2011; Xia et al., 2011). Activation of these MSNs would thus
lead to an increase of the activity of the dopaminergic neurons. This could
provide a mechanism to increase the dopamine level in response to an action
that has been associated with some positive reward or RP and could therefore
be the underlying mechanism for n-ary conditioning. Moreover, monosynaptic connections from MSNs to dopaminergic neurons could thus convey the
inhibitory signal of the RP, which would counter-balance either the mentioned
disinhibition of the dopaminergic neurons or their excitation, caused by of the
delivery of a reward.
In our second paper, an artificial increase of the RP in 94% of the time the
model selects the right (not left) side leads to an increase of the left side selection ratio, thereby showing that specific modifications of the RP can impact
the selection.
Now let us consider the possible circuitry and characteristics of the RP
pathway. Nieh et al. (2015) have reported that the lateral hypothalamus sends
both excitatory and inhibitory connections to dopaminergic and GABAergic
neurons in the VTA. This describes what could be a possible separate RP system to the one stemming from striosomes. However, if one considers that the
RP pathway relies on the striosomal-dopaminergic nuclei circuit, with both a
direct and an indirect pathway, as suggested by Fujiyama et al. (2011) and
Stephenson-Jones et al. (2013), then the reported connections from the lateral hypothalamus plead for a localisation of the synaptic plasticity in the RP
pathway at synapses contacting dopaminergic and, possibly, GABAergic neurons. Indeed, this localisation would allow the presynaptic neurons, strioso116
mal MSNs, to take into account the modifications of the dopaminergic neuron activity triggered by the lateral hypothalamus, and of any other inputs the
dopaminergic neurons could receive, and could therefore be in command of the
RP. This is in support of the setup we implemented in our spiking model. If
that were not the case, that is if multiple, less dependent, circuits were involved
in the computation of the RP, it might require a more complex functional system in order to obtain the RPE signal that has been largely documented from
experimental data. It is however possible that each of these putative circuits
could compute a different aspect of the RP, as some recent studies seem to
support (Beier et al., 2015; Lammel et al., 2012; Lerner et al., 2015). It is
moreover notable that the lateral hypothalamus receives excitatory inputs from
the VTA as feedback. Optogenetic excitation of neurons in the lateral hypothalamus triggered activity in dopaminergic neurons in the VTA, which projects
back to neurons in the lateral hypothalamus. Furthermore, the optogenetic activation of lateral hypothalamic neurons led well fed mice to binge eat sugar,
even when they had to run across a platform delivering electrical shocks to
obtain it (Nieh et al., 2015). As the lateral hypothalamus has been reported
to be involved in promoting feeding behaviour, it could be that it is biasing
the BG to take action, via the incentive salience of the burst of dopaminergic
neurons resulting from the optogenetic activation of the neurons in the lateral
hypothalamus. This would confirm that the BG have to integrate a lot of different information but also that their selection can be biased by relatively limited
change of their inputs, even of the dopaminergic ones.
The sensory prediction error theory, proposed by Redgrave & Gurney (2006),
signals any deviation of the environment from its predicted state, and is thus
not specific to a reward signal, as opposed to the RPE. This theory could be
accommodated with a single mechanism, as it would account for both the RP
signal and for its inhibition, and could thus be mapped on the connections from
striosomes to dopaminergic and GABAergic neurons in the VTA and the SNc.
An absence of sensory prediction error indicates that the outcome has correctly
been predicted. This supposes that the transient increase of dopamine triggered
by the change in the environment has been successfully inhibited by the projection from neurons coding for this prediction. The difference between the
RPE and the sensory prediction error is that there is no transfer of that prediction to the events preceding the unpredicted sensory event, it only associates
the relevant event to inhibit the resulting sensory prediction error through repetition, whereas with the RPE, the RP will be transfered backwards in time,
event by event, as in TD learning models. There is no associated increase of
the value of the event as it becomes a predictor, that is that it inhibits the burst
of dopamine of the unpredicted outcome, which could thus serve for n-ary
conditioning. As Redgrave & Gurney (2006) further mentioned, the sensory
117
prediction error might be adapted in the acquisition of behavioral ‘building
blocks’, which could then be used to generate sequences of goal-directed actions. This building process has been linked with activity in the medial PFC,
which was hypothesised to have a role in determining the relevance of each
step to achieving a goal (Matsumoto & Tanaka, 2004).
It has been suggested that the reentrant cortico-BG-thalamus loops could
spread limbic and cognitive information to motor loops (Haruno & Kawato,
2006). As we have seen, the brain has been suggested to combine modelbased and model-free computations (Doll et al., 2012; Gläscher et al., 2010).
These reentrant loops could be the biological substrate for such mechanism.
They could provide the system with the expected next state given the considered action, along with the associated expected reward, in a recursive way, in
order to deduce the best action given the current policy or goal. Additionally, it is mainly the striosomes who receive inputs from the limbic system
and from the frontal cortex whereas matrisomes are believed to receive mostly
sensori-motor information (Crittenden & Graybiel, 2011; Flaherty & Graybiell, 1993). This seems to support the involvement of the RP pathway in the
evaluation of the available options, by integrating the former through these
loops for the selection. An hybrid model, mixing a model-free and a modelbased learner, exhibited a better behavioural fit to human data than did each
part alone (Gläscher et al., 2010). A consequence of this hypothesis would be
that forcing very quick action selection could prevent the integration of the RP
or of the model-based construction in the selection, as it should take more time
to integrate this information, putatively through several iteration of the corticoBG-thalamus loops. The distribution of the selection could thus exhibit a bias
towards model-free choices when time available for selection is limited. Related to that, the hyperdirect pathway could provide the global inhibition preventing any selection as long as required by these model-based computations
to come up with the directions to follow, as suggested by Baladron & Hamker
(2015).
We suggest that our probabilistic model could prove to be well suited to
learn such a model of the effects of its actions on the environment, that is
by learning that from a certain state, selecting a specific action would lead to
a certain new state, and so on. Associating the RP with these computations
could enable to plan a strategy in order to achieve a specific goal.
5.2.3
Lateral inhibition
In the spiking model detailed in paper III, we have prevented negative weights
in the connections onto the D1 and D2 matrisomal MSNs. Additionally, we
have implemented lateral inhibition between matrisomal subpopulations of the
118
same pathway. Without this lateral inhibition, the baseline firing rate of matrisomal MSNs would shoot up to 15 Hz, which is a lot higher than what has been
observed in biology and in the version of the model with lateral inhibition ( <
1 Hz, Kravitz et al. (2010); Samejima et al. (2005)). The resulting effect between allowing negative weights and implementing lateral inhibition between
subpopulations of the same pathway is quite similar, which brings support to
the biological substrate of the BCPNN that we presented in fig. 4.2. Besides
the increased firing rate, the performance is not dramatically decreased without
lateral inhibition (fig. 5.5). The slight drop in performance seems to occur in
the second part of a block, that is when one action should be the clear winner,
thereby inhibiting the other choices through lateral inhibition. Thus, without
these connections, the competing, irrelevant, actions might get more selected
because of our softmax implementation.
We have not specifically implemented interneurons for the lateral inhibition but instead the MSNs send direct inhibitory connection to those of other
subpopulations, as observed in rats and mice (Taverna et al., 2004, 2008). The
role of interneurons is of great interest in the control they have on MSN activation and therefore on the selection. They could, for example, be used to
control the exploration / exploitation ratio, through the lateral inhibition of the
competing actions. Our current spiking model could provide a solid basis to
further investigate this role.
5.2.4
Efference copy
As can be seen in fig. 5.5, the efference copy has a critical role in the learning
in our spiking model as its absence leads to a failure of the learning. We have
set the efference copy to occur concurrently with the state that triggered the
selected action (see the efference copy activation in fig. 5.7). This can therefore increase the overlap between the pre- and postsynaptic traces. However, a
recent study with rats recently showed that the activity in the ventral striatum
and in the OFC once they realized that the decision they took, to wait or not
for a reward to come, turned out to be the bad one, was similar to the activity
when rats made that decision in the first place (Steiner & Redish, 2014). This
could suggest that a working memory mechanism can, possibly through the efference copy, re-activates populations that were related to a situation that took
place in the past, further suggesting that the efference copy can be delayed in
regard to the responsible action.
There might be a limit in the processing of sequences of action by the BG.
Indeed, with our current implementation, no information processing appears
to be possible in the striatum during the efference copy. This could have some
implication for sequence learning, like playing musical instruments. We sug119
gest that this means that sequences have to be represented outside of the BG, or
have to, through learning and repetitions, become merged as single representations, or behavioural building blocks, in the BG. Furthermore, from a Bayesian
point of view, the efference copy carries information that can be used to make
a prediction about the expected outcome. The discrepancy between the sensory evidence and the expected state of the world resulting from your action is
critical in the updates of the posterior probability (see section 4.3.2 for more
details on Bayesian inference).
The segregated parallel loops within the BG could also serve as a way to
enable the selection and the execution of different actions at the same time,
provided that they are not mutually exclusive, e.g. to raise and lower the same
arm. This could also be related to the generation of sequences of actions.
The firing rate of striosomes was fixed in our simulations, but it is unlikely
that this is the case in biology. Modulations of the cortical inputs, and possibly
of those from the efference copy, onto striosomes could account for motivational drives and for goal-based representations by impacting the RP.
5.3
Habit formation
Ashby et al. (2007) hypothesised that the BG would disengage from the selection as a particular behaviour becomes automatised, that is once it has been
reliably learned via reinforcements. Such a shift has been reported in monkeys
during the learning of categories, where activity in the striatum is initially a
predictor of the classification but then activity in the PFC begins to predict the
outcome before the striatum (Antzoulatos & Miller, 2014, 2011). In humans,
an fMRI study of a categorisation task showed that automaticity develops after
an initial learning phase during which the performance depends on activity in
the putamen (Waldschmidt & Ashby, 2011). In a review, Hélie et al. (2015)
argued that the BG could act as a general purpose trainer for cortico-cortical
connections. This suggests that the main role of the BG is to create habitual
behaviours for situations occurring frequently. They could keep control of and
adapt to, through the RPE dependent plasticity, a change in the environment,
enabling a modification of the responses.
In accordance with the view that habits result from the formation of a
dopamine independent pathway outside of the BG, we have set up such connections from the state population to a new, denoted motor, population where
subpopulations represent the possible actions, similarly to the GPi/SNr. This
pathway could be apprehended as a direct excitatory connection from the cortex to the brainstem, in the schematic representation of our model in fig. 5.1
(although not explicitly represented) and in the one of the BG in fig. 3.1.
To that effect, plasticity in this habit pathway is dopamine-independent and
120
Hebbian. The learning rule used is the standard BCPNN rule, i.e. without implementing the RPE as the learning rate, but with κ set to one (eq. 4.22). Additionally, the time constant of its P traces are slower than for the other pathways,
τ p = 4000 (eight times those of the D1 and D2 pathways), but still reasonably
fast in order to facilitate the visualisation of the dynamics. the GPi/SNr also
project to the motor population in a topographical way, respecting the action
mapping. This implementation is simple enough to test the functionality of
the circuit, while avoiding the complexity of a scrupulous mapping to biology.
Within this motor population, there is also lateral inhibition between subpopulations, as well as excitatory feedback within subpopulations. It should here
be noted that the figures shown relative to this habit pathway implementation
are the result from unpublished work.
One way to address the problem of the actual selection, which has then
to integrate the contribution from the habit pathway, could be to apply the
softmax selection not on the GPi/SNr anymore but on the activity of the motor population. The motor population thus receives inhibitory inputs from the
GPi/SNr and excitatory ones from the habit pathway. Similarly to the GPi/SNr,
external excitation drives neurons in the motor population to fire in absence
of other inputs. Thus, as the BG select an action, by inhibiting the relevant
subpopulation in the GPi/SNr, the associated motor subpopulation gets disinhibited and can fire. The correlation of this activity with the one of the active
state subpopulation can therefore be picked by the BCPNN weights of the habit
pathway.
In a first time, the BG act as a teacher to the habit pathway, guiding the
selection, as can be seen by the delay in the rise of the weights of the habit
pathway compared to those of the D1 pathway in the BG, in fig. 5.6. It is
even more noticeable in the average selected action when in state 3. The BG
learn quite fast to shift its selection with each new block, whereas the weights
and selection of the habit pathway trail behind. This is similar to the results
from Charlesworth et al. (2012) and to the hypothesis from Ashby et al. (2007)
(and reviewed by Hélie et al. (2015)). In our implementation, the habit pathway does not seem to be affected right from the start of each block. It seems
that during the first successful trials in a block, the weak weights from cortical
neurons onto MSNs D1 do not elicit a strong enough release of the inhibition
from the GPi/SNr to the motor subpopulations to enable the latter to fire sufficiently for the BCPNN weights of the habit pathway to grow. This means that
habit formation starts only once the selected action has become salient enough
in the GPi/SNr. However, once the habit pathway has learned the correct actions to select, the BG become redundant. This is highlighted in block 5 of
the simulation depicted in fig. 5.6 where the cortico-striatal connections onto
D1 and D2 MSNs are basically rendered inactive for the whole block, before
121
Figure 5.6: BG versus habit pathway. Evolution of the weights in the D1, D2
and habit pathways in the spiking model, over 8 blocks of 50 trials, averaged over
20 simulations. The three colour coded lines represent the average weight of the
connections from the subpopulation coding for state 3 to the three action coding
populations in the D1, D2 (A), and habit pathways (B). The black dots represent
the total average of the plotted weights. In (C) are displayed the average action
that each the BG and the habit pathway would select, when in state 3. Vertical
dashed grey lines denote the start of each new block. In block 5, the gain of the
cortico-striatal connections was set to 0, basically inactivating any BG impact on
the GPi/SNr.
122
being restored back. The action the habit pathway promotes for state 3 is thus
the same in block 5 as for the previous one, as the BG do not anymore impact
the activity in the motor population. It is confirmed by the fact that the average weights from state 3 to the motor subpopulation coding for action 3 in the
habit pathway stay elevated during these two blocks. Once the BG can impact
again the motor population, in block 6, the weights and the selection of the
habit pathway start again to follow the guidance provided by the BG.
It can also be noted that after a change in the reward mapping, the inputs from the habit pathway hinder the selection, and therefore decrease the
performance of the model, as the action promoted by the habit pathway was
the appropriate one for the previous block, which the BG now try to prevent
through strong activation of its D2 subpopulation.
Pathological habitual, or addictive, behaviours could result from the loss of
the impact of the BG on the selection compared to the habit pathway, or from a
decrease of the plasticity in the latter, or even from a too quick activation on the
motor population, via the habit pathway, for the inhibition sent from the BG to
affect the selection. In our current implementation, habitual behaviours could
furthermore increase the chance of the system to end up in the situation where
the RP system has adapted to the absence of a reward before discovering the
correct action. With no RPE, the system would get stuck in selecting the same
unrewarded action. This seems to call for some implementation of a modelbased representation, or of a drive, to avoid such dead ends (Baldassarre et al.,
2013).
Concerning the selection, a coherent or concurring contribution from the
BG and the habit pathway could lead to shorter or longer, respectively, reaction
time, as a putative threshold would be reached faster (Lo & Wang, 2006).
5.4
Delayed reward
In this task with delayed reward, the reward phase is postponed and occurs
1000 ms after the end of the activation of the state and of the efference copy
(fig. 5.7). During this interval, the network is in a similar state as in the resting
phase, i.e. there is only background activity. The time constant for the E and
P traces were set to 2000 and 10000 ms, respectively, in order to allow the
overlap of the traces and to prevent too much decay of the weights in-between
trials. We also doubled the number of trials within a block, from 40 to 80. It
has to be mentioned that the results presented for delayed reward come from
a version of the model where the D1 and D2 weights were allowed to take
negative and positive values.
The system is able to adapt and to learn to select the correct action for all
the reward mappings (nine blocks). Compared to the results of the version
123
Figure 5.7: Raster plot of the activity of a network consisting of three states
and three actions, during three trials (7.5 seconds) of a delayed reward learning
task. The states (blue), D1 (green), D2 (red), GPi/SNr (purple), efference copy
(cyan) and dopaminergic (black) populations, grouped by representation coding,
are shown. The indices of the states and actions begin from the top. For example,
neurons with an ID between 550-610 represent the D1 and D2 populations coding
for action 1. A trial lasts for 2500 ms and starts with the onset of a new state,
indicated by a vertical dashed grey line. The simultaneous higher phasic firing
rates in the D1 and D2 populations correspond to the subpopulation coding for
the selected action receiving inputs form the efference copy. Note that the x-axis,
representing time, does not start from zero.
124
without delayed rewards, it requires more trials to stop selecting the previously correct action (fig. 5.8). The evolution of the weights in the D1 and D2
pathways is similar to the one of the version without the RP pathway. Indeed,
the weights of the RP pathway never get positive and exhibit less variations
compared to the implementation without delayed reward (results not shown).
However, the RP pathway never learns to inhibit the reward signal. This failure of the RP pathway results from the reduced overlap between the traces of
the pre-, striosomal, and postsynaptic, dopaminergic neurons. Indeed, striosomal MSNs fire at the same time as the efference copy is active, that is 1000
ms before the reinforcement signal, whereas state and action coding subpopulations fire simultaneously in the D1 and D2 pathways. Even with τe set to
twice the interval between the RP activation and the reinforcement signal, the
Pi j traces do not grow enough compared to the Pi and Pj traces, resulting in
negative weights. The obvious solution could be to increase τe to a value large
enough to enable the RP weights to grow positive. However, with longer time
constants come the problem of inter-trial overlaps. This illustrates the difficult
problem of delayed reward and temporal credit assignment, even in a clean and
controlled experimental set up. Another way to improve the situation would
be to make the relevant striosomal MSNs fire at the time of the reinforcement
signal. In the current state of our model, this would prevent the RP from being
included in the action selection process. This further indicates the need for
separate pathway in the RP circuit, one involved in the coding of the RPE, as it
is implemented in the spiking model, and one in the selection, as tested in the
abstract model by the condition Actor+RP (paper I).
Anyways, there still resides a problem in any of these cases. We have
avoided the underlying computation of timing by conveniently setting the conduction delay from the striosomes to the dopaminergic neurons to the duration
of the interval. Reflecting on the requirements of delayed reward learning and
considering the functional architecture of the RP we have mentioned, it seems
to call for the recruitment of additional loops than the striosomo-dopaminergic
nuclei described. In order for the RP to be delivered at the time of the delivery
of the expected reward, and because of the mono- or disynaptic connections
from striosomal MSNs to dopaminergic neurons in the SNc and the VTA, a
timing mechanism must take place outside of this pathway, if one excludes
the conduction delay from the possible ways to adapt to the reward delay.
Furthermore, studies have demonstrated the necessity of the striatum, and of
its afferent projections from the SNc, for temporal perception and temporal
production (Matell & Meck, 2004). The timing information thus seem to be
provided to the striatum, possibly specifically to the striosomes, which would
project directly to the dopaminergic nuclei at the appropriate time. This agrees
with studies linking the BG, and especially the striatum, along with the PFC
125
Figure 5.8: Average success ratio in a delayed reward learning task. Vertical
dashed grey lines denote the start of a new block, where the reward mapping was
changed. Note that here the number of trials per block is doubled to 80.
and the cerebellum, with temporal processing, through lesions, pharmacological and imaging approaches (Harrington & Haaland, 1999; Matell & Meck,
2004).
An hypothesis could be that the coding of time in the BG relies on the
integration of the time required for an action to be performed. These durations
would be learned during development, and might involve the efference copy,
as it could provide feedback about the execution. Indeed, one key role of
the brain is to control movements (Wolpert et al., 2011). It could therefore
make sense that the coding of time might be associated with the realisation of
motor command and sequences. In an fMRI study where human participants
were asked to modulate their attention to colour or to time, Coull et al. (2004)
observed activity in visual areas of the occipital cortex when subjects had their
attention on colour whereas when their attention was directed towards time,
activity in the cortico-striatal circuits was reported. Furthermore, Jin et al.
(2009) suggested that time information could emerge as a byproduct of eventcoding in the BG. In a task where monkeys had to make saccades towards
stimuli which appeared at various intervals, the authors argued that prefrontal
and striatal neurons could encode time-stamp representations of time, that is a
peak activity with task-dependent latencies.
We can here also expand the idea that the implementation of a second,
indirect, pathway from the striosomes to the dopaminergic nuclei, that we
126
have mentioned, notably in section 5.2.2, could allow for n-ary conditioning.
Thanks to the dopaminergic neurons burst triggered by a reward predicting
event, a CS, at the time of this event, which is earlier than the reward delivery, the US, events associated with this prediction could in turns elicit a RP,
a CR, which could be picked up by even earlier events etc. Ultimately, this
would lead to the inhibition of that anticipatory phasic dopamine increase, but
these earlier events, CS, would then trigger their own CR. The response transfer should follow TD learning models, where the transition of the prediction
shifts directly from the time of the later associated event to the earlier one.
In relation to delay and time, Mobini et al. (2000) reported impulsive behaviours of rats favoring small immediate rewards instead of larger, but delayed ones, after depletion of the central serotonergic system. It has thus been
suggested that the serotonergic signal could be involved in the computation of
the discount factor of future rewards (Doya, 2002). Indeed, optogenetic activation of serotonergic neurons in dorsal raphe promoted mice’s patience for
delayed reward (Miyazaki et al., 2014). Such results do not necessary imply
the involvement of the RP in the selection in a model derived from TD learning, as the discount factor acts on action values. However, in our model, this
would vouch for a recruitment of the RP in the selection.
The coding of the predicted reward is not only about the probability of
getting the reward, which our model is able to learn, but it has to also match
the timing and the duration of the change in the firing rate of dopaminergic
neurons produced by the reinforcement feedback. We have set the stimulation
time of a striosome equal to the one of the reinforcement (section 4.4.2). It
seems, however, likely that in biology there is some temporal compression
of the inhibitory prediction into the actual time window of the reinforcement
signal (Yagishita et al., 2014).
5.5
Parkinson’s Disease
The simulation of PD was done in the spiking model by reducing the number
of dopaminergic neurons during the simulation. The abstract version of our
model does not feature an explicit tonic dopamine level that we could have
biased in an attempt to simulate a similar effect. The reduction of the number of dopaminergic neurons during a simulation leads to a decrease in the
performance of the model, worsening with the increase of the proportion of
deleted neurons (PD16 = 16%, PD33 = 33% and PD66 = 66%, fig. 5.5 and
fig. 5.9). The results suggest that the main cause of the bradykinesia observed
in PD patients could be the incorrect contribution of the D1 pathway to the
selection, caused by the lack of plasticity in the pathway, itself resulting from
the reduced baseline dopamine level, translated to a bias towards a negative
127
RPE. Indeed, it appears that the D2 pathway, although exhibiting an overactive synaptic plasticity compared to the normal condition, is still able to fulfill
its function, which is to prevent the selection of actions leading to a negative
outcome.
The two conditions with the largest depletion of dopaminergic neurons,
PD33 and PD66, have significantly worse results than the version of the model
without D1 contributions (fig. 5.5). This could indicate that it would be beneficial to completely silence the D1 pathway in advanced Parkinsionian stages.
In our simulations of the loss of dopaminergic neurons, most of the time the
D1 pathway promotes an action which does not lead to the reward and thereby
hinders the selection of the appropriate one. The constant negative RPE resulting from these two most severe conditions does not allow plasticity in the
D1 pathway. It is thus frozen in the situation it was at the time of the, sudden
(it occurs gradually in reality), decrease of the dopamine level. However, the
action it promotes turns out to be the correct one in every third block, due to
the particular reward mapping we used, and the model indeed exhibits better
results during these specific blocks.
Additionally, the PD16 and the noSF conditions show similar results in
learning (fig. 5.5). We have already seen that it is the D1 pathway that is
affected in the latter. In PD16, the dynamics of the evolution of the weights
in the D1 pathway are affected, exhibiting slower learning, resulting from the
bias towards a negative RPE caused by the dopaminergic neurons loss.
Parkinsonian patients off medication have an easier time learning to avoid
negative outcomes than learning to approach positive ones, with opposite effects once on medication (Frank et al., 2004). Results from our simulations are
consistent with this, as it is only the D2 pathway that contribute beneficially to
the selection.
During PD and with the decrease of the tonic dopamine level, D2 MSNs
show an increased sensitivity to glutamatergic inputs although the number of
receptors decreases (Bamford et al., 2004; Gerfen, 2003). Additionally, the
increased sensitivity of the D1 receptors has been suggested to correspond to
a compensatory mechanism to the reduction of the dopamine level during PD
(Iravani et al., 2012). Such mechanisms would delay the onset of the motor
symptoms in PD, usually starting when the dopaminergic neuron loss reaches
50 to 70% (Obeso et al., 2004), which is later than in our model. However,
it should be noted that our results refer to learning of new tasks, which exacerbates the troubles compared to performance in well established day to
day activities. This could be supported by the condition where the simulated
dopaminergic neurons loss occurs not concomitantly with a new block, but
at the middle of a block. There, the drop in performance is less severe and
can only be noticed in the PD66 condition, which is more in line with the be128
Figure 5.9: Evolution of the weights in the D1, D2 and RP pathways in simulations of PD degeneration of dopaminergic neurons. After 8 blocks (black
arrow), 16% (left column) or 66% (right column) of the dopaminergic neurons
were rendered useless until the end of the simulation. In A and D, the weights
represented are the average weight to each action coding population in D1 and
D2 from state 1. B and E correspond to the average weights for each state-action
pairing striosomal sub- population to the dopaminergic neuron population. C
and F display the moving average success ratio of the model over the simulation.
Vertical dashed grey lines denote the start of a new block. In A, B, D and E,
the black line is the total average of the plotted weights. Shaded areas represent
standard deviations. From paper III.
129
havioral observations. It should here be stressed that, in reality, this loss of
dopaminergic neurons occurs gradually (section 3.4.1). Also, and it can be
noted also for the noD1 condition, the results might be improved by the fact
that, in our implementation, an action is always selected, thereby exhibiting
the inappropriate selection. We have seen that optogenetic activation of the D2
MSNs does not elicit a motor response but rather suppresses or decreases motor activity (Kravitz et al., 2010; Sippy et al., 2015; Tai et al., 2012), thereby
supporting the idea that the resulting global or possibly focal inhibition of the
GPi/SNr is not enough to trigger a motor response.
In the simulation of the loss of dopaminergic neurons in SNc observed in
PD patients, we have only modified the number of active neurons, while the
remaining ones kept the same parameters and dynamic as before. As we have
mentioned, the intrinsic excitability of MSNs, and possibly of interneurons,
is affected during the disease. Implementing this in our model, for example
as Frank (2005) did, where the dopamine level modulates the gain and the
activation threshold of MSNs, would further improve the match between our
model and biology.
In our model, the independence of the RP weights to the sign of the RPE
might have prevented the development of further disruptions in the dynamics
of the weights, or in the performance, as it could have had in, for example, a
sign-dependent direct and indirect RP pathways implementation.
Finally, the implementation of the remaining nuclei of the BG, the STN
and the GPe, could allow us to simulate DBS, which prominently targets these
structures. This would be inspired from the work made for our second paper,
applied to the spiking model of paper III.
130
6. Summary and Conclusion
Our computational model of the BG, based on the BCPNN learning rule, which
computes the probabilities of activation of a neuron based on the presence of
input features, is able to learn to select the rewarded action in various reinforcement learning situations. We have investigated the functional contributions
that the main pathways and properties of the BG have on the selection and on
the learning performance through simulated lesions and reorganisation of the
model. During the development of our model to a spiking neuron implementation, we faced situations where the lack of available data challenged us to consider the possible alternatives and their theoretical and biological implications.
Reviewing the literature in order to find evidence or clues that would guide or
implementation was a seizable part of this work, to filter the relevant information among the vast ocean of data available, and to adapt and build the model
in accordance. This integration led to the discussion of various hypotheses
concerning biological substrates of functions, which themselves where commented from a theoretical point of view. We have notably suggested that the
phasic increases of dopamine, observed in conditioning tasks, might require
an additional pathway than the one from striosomal MSNs to dopaminergic
nuclei. We have further described possible loops and pathways emerging from
striosomes that could be involved in both the RP and the selection, and could
also account for conditioning phenomena. Our results suggest that the D2
pathway plays a major role in the suppression of a previously correct action,
suppression which eventually enables the system to select a different action.
The D1 pathways seems to be critical in enhancing the saliency of the correct
action, which ultimately leads to habit formation, and possibly to shorter reaction times. Our simulations of the degeneration of dopaminergic neurons
observed in PD have also led to the assessment of the role of these pathways
during the disease. A prominent result was the dysfunctional synaptic plasticity in the D1 pathway while the functional contributions of the D2 one was
mostly preserved in the PD simulation.
131
6.1
Outlook
Thrilling developments to this work can be considered. A relatively basic implementation would be that of the negative RP, and the inclusion of a pathway involving the LH. Additionally, as we discussed, it seems the RP does
in fact integrate multiple circuits, each of them possibly involved in the coding of, possibly specific, reward-related dimensions. Computational theories
and models of these pathways are needed to encompass the existing data and
to produce testable hypotheses, which, thanks to advances in technology, will
soon be confronted with novel biological findings.
Thanks to the level of biological abstraction of this work, we can consider
multiple options for the future development of the model. Increasing the biological relevance could be obtained through the implementation of the missing
structures of the BG, such as the STN and the GPe, but also of the different neurons types, e.g. interneurons, in the current model. These nuclei are
also those commonly targeted by DBS in PD (section 3.4.1). A first step toward this implementation could be to reproduce the simulation of optogenetic
stimulation in the spiking model. An additional option is to investigate the
meta-effects of dopamine on the activity of the MSNs and on the performance
of the model, in order to clarify its role. Another possibility is to investigate
system level dynamics and the relation between populations. Part of this analysis could consider the variations in entropy and information occurring during
learning, and what could impact these changes.
We suggest that our model can be enhanced to account for and to test the
various hypotheses we mentioned concerning the RP pathway. It has already
shown encouraging results in delayed learning task and in a habit formation
condition.
A major evolution in the approach would be to shift to a model-based implementation. The model could learn in which state it ends up when performing a specific action from a given state. Enabling the system to carry this
out recursively, and to use the associated reward prediction, would allow the
model to make selections based on a rich and organized representation of the
world. Furthermore, it would allow associations between states and could thus
account for some classical conditioning phenomena.
Related to that last part is the implementation of the RPE and the comments
we made in section 5.2.2. The increased activity observed at the occurrence of
a CS seems to call for an additional pathway, in relation to the RP. Moreover,
the mechanisms involved in the coding of the precise temporal materialisation
of the reward, inhibiting the dopaminergic neurons by the estimated value of
that reward, are still to be explained and taken into account in the model.
My background in clinical and cognitive psychology vouch for my interest
132
in mental disorders, and as we have seen in section 3.4, computational psychology and computational psychiatry could help bridge the explanatory gap,
and who knows, true AI might end up facing true artificial mental troubles?
6.2
Conclusion
With the spiking neurons implementations we have increased the biological
relevance of the model, of the results and of the predictions. Furthermore, we
faced implementation dilemmas during the development of the spiking version
of the model. As some functional and structural biological substrates were not
known, we could formulate hypotheses constrained by the framework and the
results of our models and by relevant biological data. we have tried to constrain
our top-down approach with biological data. I hope this work gave a good
overview of the general work process and of the train of thoughts that spanned
over the last five years, as they constitute the substrate for the development of
the models. Finally, the previous section has underlined the challenges that lie
ahead.
6.3
Original Contributions
I have contributed to the implementation of the multiple factors learning rule
and the definition of its interdependent effects.
I have implemented a complex computational model of the BG with spiking neurons and online learning. It is able to learn to select the correct action
for a given state and to predict the reward, and shows good similarities with
biological data.
I have detailed and tested the functional relevance of pathways and features
of the BG in learning, and assessed the results with statistical analyses.
I have suggested and discussed different hypotheses related to the structural and functional connectivity in relation to the BG. Based on the results of
the model, I have challenged the dominant view in PD, which attributes most
of the motor troubles to dysfunctions in the D2 pathway of the BG.
Through the selection of open access journals for the publication of our
works, and the openly accessible source code of the simulations (abstract model:
see supplementary information of Paper II; spiking model: https://github.
com/pierreberthet/bg_dopa_nest), my scientific contributions are available to the general population.
133
134
References
A DAMANTIDIS , A.R., T SAI , H.C., B OUTREL , B., Z HANG , F., S TUBER , G.D., B UDYGIN , E. A .,
T OURIÑO , C., B ONCI , A., D EISSEROTH , K. & DE L ECEA , L. (2011). Optogenetic interrogation
of dopaminergic modulation of the multiple phases of reward-seeking behavior. The Journal of neuroscience : the official journal of the Society for Neuroscience, 31, 10829–35. 114
A IZMAN , O., B RISMAR , H., U HLÉN , P., Z ETTERGREN , E., L EVEY, A .I., F ORSSBERG , H., G REEN GARD , P. & A PERIA , A . (2000). Anatomical and physiological evidence for D1 and D2 dopamine
receptor colocalization in neostriatal neurons. Nature neuroscience, 3, 226–30. 46
A LBERICO , S.L., C ASSELL , M.D. & NARAYANAN , N.S. (2015). The vulnerable ventral tegmental area
in Parkinson’s disease. Basal Ganglia, 5, 51–55. 68
A LBIN , R.L. (1995). The Pathophysiology and Parkinsonism of Chorea / Ballism. Science, 1, 3–11. 70
A LBIN , R.L., YOUNG , A.B., P ENNEY, J.B., ROGER , L.A. & YOUNG , B.B. (1989). The functional
anatomy of basal ganglia disorders. Trends in neurosciences, 12, 366–375. 43, 48, 68
A LEXANDER , G., D E L ONG , M. & S TRICK , P.L. (1986). Parallel organization of functionally segregated
circuits linking basal ganglia and cortex. Annual review of Neuroscience, 9, 357–381. 44, 52, 53
A LEXANDER , G.G. & C RUTCHER , M. (1990). Functional architecture of basal ganglia circuits: neural
substrates of parallel processing. Trends in Neurosciences, 13, 266–271. 43, 48
A LI , F., OTCHY, T.M., P EHLEVAN , C., FANTANA , A.L., B URAK , Y. & Ö LVECZKY, B.P. (2013). The
Basal Ganglia Is Necessary for Learning Spectral, but Not Temporal, Features of Birdsong. Neuron, 80,
494–506. 66
A LLEN , C. & S TEVENS , C.F. (1994). An evaluation of causes for unreliability of synaptic transmission.
Proceedings of the National Academy of Sciences of the United States of America, 91, 10380–10383. 35
A MEMORI , K.I., G IBB , L.G. & G RAYBIEL , A.M. (2011). Shifting responsibly: the importance of striatal
modularity to reinforcement learning in uncertain environments. Frontiers in human neuroscience, 5,
47. 50, 80, 111
A NTZOULATOS , E. & M ILLER , E. (2014). Increases in Functional Connectivity between Prefrontal Cortex
and Striatum during Category Learning. Neuron, 83, 216–225. 120
A NTZOULATOS , E.G. & M ILLER , E.K. (2011). Differences between Neural Activity in Prefrontal Cortex
and Striatum during Learning of Novel Abstract Categories. Neuron, 71, 243–249. 120
AOSAKI , T., K IUCHI , K. & K AWAGUCHI , Y. (1998). Dopamine D1-like receptor activation excites rat
striatal large aspiny neurons in vitro. The Journal of neuroscience : the official journal of the Society for
Neuroscience, 18, 5180–5190. 51
A PICELLA , P. (2002). Tonically active neurons in the primate striatum and their role in the processing of
information about motivationally relevant events. European Journal of Neuroscience, 16, 2017–2026.
59
A PICELLA , P. (2007). Leading tonically active neurons of the striatum from reward detection to context
recognition. Trends in neurosciences, 30, 299–306. 51
A PICELLA , P., R AVEL , S., D EFFAINS , M. & L EGALLET, E. (2011). The Role of Striatal Tonically Active Neurons in Reward Prediction Error Signaling during Instrumental Task Performance. Journal of
Neuroscience, 31, 1507–1515. 51
A SHBY, F.G., E NNIS , J.M. & S PIERING , B.J. (2007). A neurobiological theory of automaticity in perceptual categorization. Psychological review, 114, 632–56. 67, 120, 121
ATALLAH , H.E., L OPEZ -PANIAGUA , D., RUDY, J.W., O’R EILLY, R.C. & R EILLY, R.C.O. (2007). Separate neural substrates for skill learning and performance in the ventral and dorsal striatum. Nature
neuroscience, 10, 126–31. 49, 65, 66
ATHERTON , J.F. & B EVAN , M.D. (2005). Ionic mechanisms underlying autonomous action potential generation in the somata and dendrites of GABAergic substantia nigra pars reticulata neurons in vitro. The
Journal of neuroscience : the official journal of the Society for Neuroscience, 25, 8272–81. 53
A ZDAD , K., C HÀVEZ , M., B ISCHOP, P.D., W ETZELAER , P., M ARESCAU , B., D E D EYN , P.P., G ALL ,
D., S CHIFFMANN , S.N., A ZDAD , K., C HA , M., D EYN , P.D., G ALL , D. & S CHIFFMANN , S.N.
(2009). Homeostatic plasticity of striatal neurons intrinsic excitability following dopamine depletion.
PLoS ONE, 4. 42, 63
BAHUGUNA , J., A ERTSEN , A. & K UMAR , A. (2015). Existence and Control of Go/No-Go Decision
Transition Threshold in the Striatum. PLOS Computational Biology, 11, e1004233. 66, 79, 106, 109
BALADRON , J. & H AMKER , F.H. (2015). A spiking neural network based on the basal ganglia functional
anatomy. Neural Networks, 67, 1–13. 54, 79, 80, 111, 118
BALDASSARRE , G., M ANNELLA , F., F IORE , V.G., R EDGRAVE , P., G URNEY, K. & M IROLLI , M.
(2013). Intrinsically motivated action-outcome learning and goal-based action recall: A system-level
bio-constrained computational model. Neural Networks, 41, 168–187. 123
BALLEINE , B., DAW, N. & O’D OHERTY, J. (2008). Multiple forms of value learning and the function of
dopamine. Neuroeconomics: decision making and the brain, 367–388. 26
BALLEINE , B.W., D ELGADO , M.R. & H IKOSAKA , O. (2007). The role of the dorsal striatum in reward
and decision-making. The Journal of neuroscience : the official journal of the Society for Neuroscience,
27, 8161–5. 48
BAMFORD , N.S., ROBINSON , S., PALMITER , R.D., J OYCE , J.A., M OORE , C. & M ESHUL , C.K. (2004).
Dopamine Modulates Release from Corticostriatal Terminals. The Journal of Neuroscience, 24, 9541–
9552. 68, 128
BAR -G AD , I. & B ERGMAN , H. (2001). Stepping out of the box: information processing in the neural
networks of the basal ganglia. Current opinion in neurobiology, 11, 689–695. 55
BAR -G AD , I., H AVAZELET-H EIMER , G., G OLDBERG , J., RUPPIN , E. & B ERGMAN , H. (2000).
Reinforcement-Driven Dimensionality Reduction-A Model for Information Processing in the Basal
Ganglia. Journal of basic and clinical physiology and pharmacology, 11, 305–320. 82
BAR -G AD , I., M ORRIS , G. & B ERGMAN , H. (2003). Information processing, dimensionality reduction
and reinforcement learning in the basal ganglia. 53, 82
BARRES , B. A . (2008). The Mystery and Magic of Glia: A Perspective on Their Roles in Health and Disease. Neuron, 60, 430–440. 33
BARTO , A.G., S UTTON , R.S. & A NDERSON , C.W. (1983). Neuronlike adaptive elements that can solve
difficult learning control problems. 29
BATEUP, H.S., S ANTINI , E., S HEN , W., B IRNBAUM , S., VALJENT, E., S URMEIER , D.J., F ISONE , G.,
N ESTLER , E.J. & G REENGARD , P. (2010). Distinct subclasses of medium spiny neurons differentially
regulate striatal motor behaviors. Proceedings of the National Academy of Sciences, 107, 14845–14850.
46
BAUNEZ , C., H UMBY, T., E AGLE , D.M., RYAN , L.J., D UNNETT, S.B. & ROBBINS , T.W. (2001). Effects of STN lesions on simple vs choice reaction time tasks in the rat: Preserved motor readiness, but
impaired response selection. European Journal of Neuroscience, 13, 1609–1616. 54
BAYER , H.M. & G LIMCHER , P.W. (2005). Midbrain dopamine neurons encode a quantitative reward
prediction error signal. Neuron, 47, 129–41. 60
B EIER , K., S TEINBERG , E., D E L OACH , K., X IE , S., M IYAMICHI , K., S CHWARZ , L., G AO , X., K RE MER , E., M ALENKA , R. & L UO , L. (2015). Circuit Architecture of VTA Dopamine Neurons Revealed
by Systematic Input-Output Mapping. Cell, 162, 622–634. 57, 117
B EISER , D.G. & H OUK , J.C. (1998). Model of cortical-basal ganglionic processing: encoding the serial
order of sensory events. Journal of neurophysiology, 79, 3168–88. 55, 79
B EKOLAY, T., B ERGSTRA , J., H UNSBERGER , E., D EWOLF, T., S TEWART, T.C., R ASMUSSEN , D.,
C HOO , X., VOELKER , A.R. & E LIASMITH , C. (2014). Nengo: a Python tool for building large-scale
functional brain models. Frontiers in neuroinformatics, 7, 48. 75
B ELL , C.C., H AN , V.Z., S UGAWARA , Y. & G RANT, K. (1997). Synaptic plasticity in a cerebellum-like
structure depends on temporal order. Nature, 387, 278–281. 42
B ENABID , A.L. (2003). Deep brain stimulation for Parkinson’s disease. Current Opinion in Neurobiology,
13, 696–706. 69
B ERKE , J.D. & H YMAN , S.E. (2000). Addiction, dopamine, and the molecular mechanisms of memory.
Neuron, 25, 515–532. 63
B ERKE , J.D., O KATAN , M., S KURSKI , J. & E ICHENBAUM , H.B. (2004). Oscillatory entrainment of
striatal neurons in freely moving rats. Neuron, 43, 883–896. 47
B ERNS , G.S. & S EJNOWSKI , T.J. (1998). A Computational Model of How the Basal Ganglia Produce
Sequences. Journal of cognitive neuroscience, 10, 108–21. 55, 81
B ERNS , G.S., M C C LURE , S.M., PAGNONI , G. & M ONTAGUE , P.R. (2001). Predictability modulates
human brain response to reward. The Journal of neuroscience : the official journal of the Society for
Neuroscience, 21, 2793–8. 49, 81
B ERRETTA , N., N ISTICÒ , R., B ERNARDI , G. & M ERCURI , N.B. (2008). Synaptic plasticity in the basal
ganglia: a similar code for physiological and pathological conditions. Progress in neurobiology, 84,
343–62. 40, 61, 64
B ERRIDGE , K.C. (2007). The debate over dopamine’s role in reward: the case for incentive salience.
Psychopharmacology, 191, 391–431. 63
B EST, P.J., W HITE , A .M. & M INAI , A . (2001). Spatial processing in the brain: the activity of hippocampal
place cells. Annual review of neuroscience, 24, 459–486. 38
B EVAN , M.D., M AGILL , P.J., T ERMAN , D., B OLAM , J.P. & W ILSON , C.J. (2002). Move to the rhythm:
Oscillations in the subthalamic nucleus-external globus pallidus network. Trends in Neurosciences, 25,
525–531. 54
B I , G. Q . & P OO , M. M . (2001). Synaptic Modification by Correlated Activity: Hebb’s Postulate Revisited.
Annual Review of Neuroscience, 24, 139–166. 21, 25
B I , G. Q .Q. & P OO , M. M .M. (1998). Synaptic modifications in cultured hippocampal neurons: dependence
on spike timing, synaptic strength, and postsynaptic cell type. The Journal of neuroscience : the official
journal of the Society for Neuroscience, 18, 10464–10472. 42
B IENENSTOCK , E.L., C OOPER , L.N. & M UNRO , P.W. (1982). Theory for the development of neuron
selectivity: orientation specificity and binocular interaction in visual cortex. The Journal of neuroscience
: the official journal of the Society for Neuroscience, 2, 32–48. 77
B LAKEMORE , S. J .J., W OLPERT, D., F RITH , C., W OLPERT, C.A.D. & F RITH , C. (2000). Why can’t you
tickle yourself? Neuroreport, 11, R11–R16. 55
B OERLIN , M., M ACHENS , C.K. & D ENÈVE , S. (2013). Predictive Coding of Dynamical Variables in
Balanced Spiking Networks. PLoS computational biology, 9, e1003258. 84
B OGACZ , R. & L ARSEN , T. (2011). Integration of reinforcement learning and optimal decision-making
theories of the Basal Ganglia. Neural computation, 23, 817–51. 80
B OLAM , J.P., H ANLEY, J.J., B OOTH , P. A . & B EVAN , M.D. (2000). Synaptic organisation of the basal
ganglia. Journal of anatomy, 196 ( Pt 4, 527–542. 44
B ONCI , A. & M ALENKA , R.C. (1999). Properties and plasticity of excitatory synapses on dopaminergic
and GABAergic cells in the ventral tegmental area. The Journal of neuroscience : the official journal of
the Society for Neuroscience, 19, 3723–30. 59
B OSTAN , A.C., D UM , R.P. & S TRICK , P.L. (2010). The basal ganglia communicate with the cerebellum.
Proceedings of the National Academy of Sciences of the United States of America, 107, 8452–6. 54
B OSTAN , A.C., D UM , R.P. & S TRICK , P.L. (2013). Cerebellar networks with the cerebral cortex and
basal ganglia. Trends in cognitive sciences, 17, 241–54. 54
B OWERS , J.S. (2009). On the biological plausibility of grandmother cells: implications for neural network
theories in psychology and neuroscience. Psychological review, 116, 220–251. 37
B RACCI , E., B RACCI , E., C ENTONZE , D., C ENTONZE , D., B ERNARDI , G., B ERNARDI , G., C AL ABRESI , P. & C ALABRESI , P. (2002). Dopamine excites fast-spiking interneurons in the striatum. J
Neurophysiol, 87, 2190–2194. 51
B RODY, M. & KORNGREEN , A. (2013). Simulating the effects of short-term synaptic plasticity on postsynaptic dynamics in the globus pallidus. Frontiers in systems neuroscience, 7, 40. 41
B ROMBERG -M ARTIN , E.S., M ATSUMOTO , M. & H IKOSAKA , O. (2010). Dopamine in motivational control: rewarding, aversive, and alerting. Neuron, 68, 815–34. 63
B ROWN , R.E. & M ILNER , P.M. (2003). The legacy of Donald O. Hebb: more than the Hebb synapse.
Nature reviews. Neuroscience, 4, 1013–1019. 25
B ROWN , T.H., K EENAN , C.L., K AIRISS , E.W. & K EENAN , C.L. (1990). Hebbian synapses: biophysical
mechanisms and algorithms. Annual review of neuroscience, 13, 475–511. 25
B UESING , L., B ILL , J., N ESSLER , B. & M AASS , W. (2011). Neural dynamics as sampling: a model
for stochastic computation in recurrent networks of spiking neurons. PLoS computational biology, 7,
e1002211. 84, 91
B UHUSI , C.V. & M ECK , W.H. (2005). What makes us tick? Functional and neural mechanisms of interval
timing. Nature reviews. Neuroscience, 6, 755–765. 82
B UONOMANO , D.V. & L AJE , R. (2010). Population clocks: motor timing with neural dynamics. Trends
in Cognitive Sciences, 14, 520–527. 55
B URGUIERE , E., M ONTEIRO , P., F ENG , G. & G RAYBIEL , A.M. (2013). Optogenetic Stimulation of
Lateral Orbitofronto-Striatal Pathway Suppresses Compulsive Behaviors. Science, 340, 1243–1246. 66
B URRONE , J. & M URTHY, V.N. (2003). Synaptic gain control and homeostasis. Current Opinion in Neurobiology, 13, 560–567. 42
C ACHOPE , R. & C HEER , J.F. (2014). Local control of striatal dopamine release. Frontiers in Behavioral
Neuroscience, 8, 1–7. 62
C ALABRESI , P., C ENTONZE , D., G UBELLINI , P., M ARFIA , G.A., P ISANI , A., S ANCESARIO , G. &
B ERNARDI , G. (2000). Synaptic transmission in the striatum: from plasticity to neurodegeneration.
Progress in neurobiology, 61, 231–65. 60, 63
C ALLU , D., P UGET, S., FAURE , A., G UEGAN , M. & E L M ASSIOUI , N. (2007). Habit learning dissociation in rats with lesions to the vermis and the interpositus of the cerebellum. Neurobiology of disease,
27, 228–37. 67
C ANALES , J.J. (2005). Stimulant-induced adaptations in neostriatal matrix and striosome systems: transiting from instrumental responding to habitual behavior in drug addiction. Neurobiology of learning and
memory, 83, 93–103. 66
C ANNON , C.M. & PALMITER , R.D. (2003). Reward without dopamine. The Journal of neuroscience : the
official journal of the Society for Neuroscience, 23, 10827–10831. 61
C APORALE , N. & DAN , Y. (2008). Spike timing-dependent plasticity: a Hebbian learning rule. Annual
review of neuroscience, 31, 25–46. 42
C ARDINAL , R.N., PARKINSON , J. A ., H ALL , J. & E VERITT, B.J. (2002). Emotion and motivation: the
role of the amygdala, ventral striatum, and prefrontal cortex. Neuroscience and biobehavioral reviews,
26, 321–52. 38
C ARLI , M. & I NVERNIZZI , R.W. (2014). Serotoninergic and dopaminergic modulation of cortico-striatal
circuit in executive and attention deficits induced by NMDA receptor hypofunction in the 5-choice serial
reaction time task. 8, 1–20. 109
C ARR , D.B. & S ESACK , S.R. (2000). Projections from the rat prefrontal cortex to the ventral tegmental
area: target specificity in the synaptic associations with mesoaccumbens and mesocortical neurons. The
Journal of neuroscience : the official journal of the Society for Neuroscience, 20, 3864–3873. 56
C HABROL , F.P., A RENZ , A., W IECHERT, M.T., M ARGRIE , T.W. & D I G REGORIO , D. A . (2015). Synaptic diversity enables temporal coding of coincident multisensory inputs in single neurons. Nature Neuroscience. 36
C HAKRAVARTHY, V.S., J OSEPH , D. & BAPI , R.S. (2010). What do the basal ganglia do? A modeling
perspective. Biological cybernetics, 103, 237–53. 55
C HALUPA , L., B ERARDI , N., C ALEO , M., G ALI -R ESTRA , L. & P IZZORUSSO , T. (2011). Cerebral
Plasticity: New Perspectives. MIT Press. 40
C HANG , C.Y., E SBER , G.R., M ARRERO -G ARCIA , Y., YAU , H.J., B ONCI , A. & S CHOENBAUM , G.
(2015). Brief optogenetic inhibition of dopamine neurons mimics endogenous negative reward prediction errors. Nature Neuroscience, 1–8. 61, 114
C HARLESWORTH , J.D., WARREN , T.L. & B RAINARD , M.S. (2012). Covert skill learning in a corticalbasal ganglia circuit. Nature, 486, 251–5. 66, 121
C HERSI , F., M IROLLI , M., P EZZULO , G. & BALDASSARRE , G. (2013). A spiking neuron model of the
cortico-basal ganglia circuits for goal-directed and habitual action learning. Neural Networks, 41, 212–
224. 79, 80
C HEVALIER , G. & D ENIAU , J.M. (1990). Disinhibition as a basic process in the expression of striatal
functions. Trends in neurosciences, 13, 277–80. 53
C HIKEN , S. & NAMBU , A. (2014). Disrupting neuronal transmission: mechanism of DBS? Frontiers in
systems neuroscience, 8, 33. 69
C HUHMA , N., TANAKA , K.F., H EN , R. & R AYPORT, S. (2011). Functional connectome of the striatal
medium spiny neuron. The Journal of neuroscience : the official journal of the Society for Neuroscience,
31, 1183–92. 39, 44, 46, 48, 57, 116
C ITRI , A. & M ALENKA , R.C. (2008). Synaptic Plasticity: Multiple Forms, Functions, and Mechanisms.
Neuropsychopharmacology, 33, 18–41. 40
C LOPATH , C., Z IEGLER , L., VASILAKI , E., B ÜSING , L. & G ERSTNER , W. (2008). Tag-triggerconsolidation: A model of early and late long-term-potentiation and depression. PLoS Computational
Biology, 4. 78
C OHEN , J.Y., H AESLER , S., VONG , L., L OWELL , B.B. & U CHIDA , N. (2012). Neuron-type-specific
signals for reward and punishment in the ventral tegmental area. Nature, 482, 85–8. 58
C OHEN , M.X. & F RANK , M.J. (2009). Neurocomputational models of basal ganglia function in learning,
memory and choice. Behavioural Brain Research, 199, 141–156. 30, 79
C OLLINS , A.G.E. & F RANK , M.J. (2014). Opponent actor learning (OpAL): Modeling interactive effects
of striatal dopamine on reinforcement learning and choice incentive. Psychological review, 121, 337–66.
79, 82
C OMOLI , E., C OIZET, V., B OYES , J., B OLAM , J.P., C ANTERAS , N.S., Q UIRK , R.H., OVERTON , P.G.
& R EDGRAVE , P. (2003). A direct projection from superior colliculus to substantia nigra for detecting
salient visual events. Nature neuroscience, 6, 974–980. 63
C OSSETTE , M., L ÉVESQUE , M. & PARENT, A. (1999). Dopaminergic innervation of human basal ganglia.
Neuroscience Research, 20, 51–54. 64
C OULL , J.T., V IDAL , F., NAZARIAN , B. & M ACAR , F. (2004). Functional anatomy of the attentional
modulation of time estimation. Science (New York, N.Y.), 303, 1506–8. 126
C OUTUREAU , E. & K ILLCROSS , S. (2003). Inactivation of the infralimbic prefrontal cortex reinstates
goal-directed responding in overtrained rats. Behavioural Brain Research, 146, 167–174. 65
C OX , S.M., F RANK , M.J., L ARCHER , K., F ELLOWS , L.K., C LARK , C.A., L EYTON , M. & DAGHER , A.
(2015). Striatal D1 and D2 signaling differentially predict learning from positive and negative outcomes.
NeuroImage, 109, 95–101. 61
C RITTENDEN , J.R. & G RAYBIEL , A.M. (2011). Basal Ganglia Disorders Associated with Imbalances in
the Striatal Striosome and Matrix Compartments. Frontiers in neuroanatomy, 5, 59. 46, 47, 52, 69, 118
C UI , G., J UN , S.B., J IN , X., P HAM , M.D., VOGEL , S.S., L OVINGER , D.M. & C OSTA , R.M. (2013a).
Concurrent activation of striatal direct and indirect pathways during action initiation. Nature, 494, 238–
42. 47
C UI , G., J UN , S.B., J IN , X., P HAM , M.D., VOGEL , S.S., L OVINGER , D.M. & C OSTA , R.M. (2013b).
Concurrent activation of striatal direct and indirect pathways during action initiation. Nature, 494, 238–
42. 109
DAN , Y. & P OO , M.M. (2004). Spike timing-dependent plasticity of neural circuits. Neuron, 44, 23–30.
42
DANG , M.T., YOKOI , F., Y IN , H.H., L OVINGER , D.M., WANG , Y. & L I , Y. (2006). Disrupted motor
learning and long-term synaptic plasticity in mice lacking NMDAR1 in the striatum. Proceedings of the
National Academy of Sciences of the United States of America, 103, 15254–15259. 61
DAVISON , A.P., B RÜDERLE , D., E PPLER , J., K REMKOW, J., M ULLER , E., P ECEVSKI , D., P ERRINET,
L. & Y GER , P. (2008). PyNN: A Common Interface for Neuronal Network Simulators. Frontiers in
neuroinformatics, 2, 11. 76
DAW, N.D., N IV, Y. & DAYAN , P. (2005). Uncertainty-based competition between prefrontal and dorsolateral striatal systems for behavioral control. Nature neuroscience, 8, 1704–11. 26
DAW, N.D., C OURVILLE , A.C., T OURETZKY, D.S. & T OURTEZKY, D.S. (2006). Representation and
timing in theories of the dopamine system. Neural computation, 18, 1637–1677. 82
DAW, N.D., G ERSHMAN , S.J., S EYMOUR , B., DAYAN , P. & D OLAN , R.J. (2011). Model-based influences on humans’ choices and striatal prediction errors. Neuron, 69, 1204–1215. 108
DAY, M., WANG , Z., D ING , J., A N , X., I NGHAM , C.A., S HERING , A.F., W OKOSIN , D., I LIJIC , E.,
S UN , Z., S AMPSON , A.R., M UGNAINI , E., D EUTCH , A.Y., S ESACK , S.R., A RBUTHNOTT, G.W. &
S URMEIER , D.J. (2006). Selective elimination of glutamatergic synapses on striatopallidal neurons in
Parkinson disease models. Nature neuroscience, 9, 251–9. 63
DAYAN , P. & A BBOTT, L.F. (2001). Theoretical Neuroscience: Computational and Mathematical Modeling of Neural Systems. 20, 36, 86
DAYAN , P. & BALLEINE , B.B.B.W. (2002). Reward, motivation, and reinforcement learning. Neuron, 36,
285–298. 60
DE
L AU , L.M.L. & B RETELER , M.M.B. (2006). Epidemiology of Parkinson’s disease. The Lancet. Neurology, 5, 525–535. 67
D ELONG , M. & W ICHMANN , T. (2009). Update on models of basal ganglia function and dysfunction.
Parkinsonism & related disorders, 15 Suppl 3, S237–40. 79, 81
D ELONG , M.R., G EORGOPOULOS , A.P., C RUTCHER , M.D., R ICHARDSON , R.T. & A LEXANDER , G.E.
(1984). Functional organization of the basal ganglia : contributions of single-cell recording studies. In
Functions of the basal ganglia, 64–82. 53
D E L ONG , M.R.M. (1990). Primate models of movement disorders of basal ganglia origin. Trends in Neurosciences, 13, 281–285. 43, 68, 70
D ENEVE , S. (2008a). Bayesian spiking neurons I: inference. Neural computation, 20, 91–117. 84
D ENEVE , S. (2008b). Bayesian spiking neurons II: learning. Neural computation, 20, 118–45. 91
D ENG , Y., L ANCIEGO , J., G OFF , L.K.L., C OULON , P., S ALIN , P., K ACHIDIAN , P., L EI , W., D EL M AR ,
N. & R EINER , A. (2015). Differential organization of cortical inputs to striatal projection neurons of
the matrix compartment in rats. Frontiers in systems neuroscience, 9, 51. 47
D ING , J.B., G UZMAN , J.N., P ETERSON , J.D., G OLDBERG , J. A . & S URMEIER , D.J. (2010). Thalamic
gating of corticostriatal signaling by cholinergic interneurons. Neuron, 67, 294–307. 51
D OIG , N.M., M OSS , J. & B OLAM , J.P. (2010). Cortical and thalamic innervation of direct and indirect
pathway medium-sized spiny neurons in mouse striatum. The Journal of neuroscience : the official
journal of the Society for Neuroscience, 30, 14610–14618. 44, 47
D OLAN , R.J. & DAYAN , P. (2013). Goals and habits in the brain. Neuron, 80, 312–25. 67, 108
D OLL , B.B., S IMON , D. A . & DAW, N.D. (2012). The ubiquity of model-based reinforcement learning.
Current Opinion in Neurobiology, 22, 1075–1081. 108, 118
D OLL , B.B., D UNCAN , K.D., S IMON , D.A., S HOHAMY, D. & DAW, N.D. (2015). Model-based choices
involve prospective neural activity. Nature Neuroscience, 18, 767–772. 108
D OMINEY, P., A RBIB , M. & J OSEPH , J.P. (1995). A Model of Corticostriatal Plasticity for Learning
Oculomotor Associations and Sequences. Journal of Cognitive Neuroscience, 7, 311–336. 55
D OYA , K. (1999). What are the computations of the cerebellum, the basal ganglia and the cerebral cortex?
21, 38
D OYA , K. (2000a). Complementary roles of basal ganglia and cerebellum in learning and motor control.
Current Opinion in Neurobiology, 10, 732–739. 21, 38
D OYA , K. (2000b). Reinforcement learning in continuous time and space. Neural computation, 12, 219–45.
82
D OYA , K. (2002). Metalearning and neuromodulation. Neural networks : the official journal of the International Neural Network Society, 15, 495–506. 127
D OYA , K. (2007). Reinforcement learning: Computational theory and biological mechanisms. HFSP Journal, 1, 30. 79
D OYA , K. (2008). Modulators of decision making. Nature neuroscience, 11, 410–416. 109
D OYA , K., S AMEJIMA , K., K ATAGIRI , K. I . & K AWATO , M. (2002). Multiple model-based reinforcement
learning. Neural computation, 14, 1347–1369. 80, 109
D OYA , K., I SHII , S., P OUGET, A. & R AO , R.P.N. (2007). Bayesian Brain. Mit press edn. 83, 84, 86, 87
D UPUIS , J.P., F EYDER , M., M IGUELEZ , C., G ARCIA , L., M ORIN , S., C HOQUET, D., H OSY, E.,
B EZARD , E., F ISONE , G., B IOULAC , B.H. & BAUFRETON , J. (2013). Dopamine-Dependent LongTerm Depression at Subthalamo-Nigral Synapses Is Lost in Experimental Parkinsonism. Journal of
Neuroscience, 33, 14331–14341. 69
D URIEUX , P.F., B EARZATTO , B., G UIDUCCI , S., B UCH , T., WAISMAN , A., Z OLI , M., S CHIFFMANN ,
S.N. & DE K ERCHOVE D ’E XAERDE , A. (2009). D2R striatopallidal neurons inhibit both locomotor
and drug reward processes. Nature Neuroscience, 12, 393–395. 46
E BLEN , F. & G RAYBIEL , A.M. (1995). Highly restricted origin of prefrontal cortical inputs to striosomes
in the macaque monkey. The Journal of neuroscience : the official journal of the Society for Neuroscience, 15, 5999–6013. 47
E NGLISH , D.F., I BANEZ -S ANDOVAL , O., S TARK , E., T ECUAPETLA , F., B UZSÁKI , G., D EISSEROTH ,
K., T EPPER , J.M. & KOOS , T. (2011). GABAergic circuits mediate the reinforcement-related signals
of striatal cholinergic interneurons. Nature Neuroscience, 15, 123–130. 52
E PPLER , J.M., H ELIAS , M., M ULLER , E., D IESMANN , M. & G EWALTIG , M.O. (2008). PyNEST: A
Convenient Interface to the NEST Simulator. Frontiers in neuroinformatics, 2, 12. 75
E VERITT, B.J. & ROBBINS , T.W. (2005). Neural systems of reinforcement for drug addiction: from actions to habits to compulsion. Nature neuroscience, 8, 1481–9. 65
FAISAL , A.A., S ELEN , L.P.J. & W OLPERT, D.M. (2008). Noise in the nervous system. Nature reviews.
Neuroscience, 9, 292–303. 35
FARAHINI , N., H EMANI , A., L ANSNER , A., C LERMIDY, F. & S VENSSON , C. (2014). A scalable custom simulation machine for the Bayesian Confidence Propagation Neural Network model of the brain.
Proceedings of the Asia and South Pacific Design Automation Conference, ASP-DAC, 578–585. 77
FARRIES , M.A. & FAIRHALL , A.L. (2007). Reinforcement Learning With Modulated Spike Timing Dependent Synaptic Plasticity. Journal of Neurophysiology, 98, 3648–3665. 61
FAURE , A., H ABERLAND , U. & M ASSIOUI , N.E. (2005). Lesion to the Nigrostriatal Dopamine System
Disrupts Stimulus – Response Habit Formation. 25, 2771–2780. 65
F EE , M.S. (2012). Oculomotor learning revisited: a model of reinforcement learning in the basal ganglia
incorporating an efference copy of motor actions. Frontiers in Neural Circuits, 6, 1–18. 54
F EE , M.S. (2014). The role of efference copy in striatal learning. Current Opinion in Neurobiology, 25,
194–200. 55
F ELDMAN , D.E. (2012). The Spike-Timing Dependence of Plasticity. Neuron, 75, 556–571. 42, 79
F IEBIG , F. & L ANSNER , A. (2014). Memory consolidation from seconds to weeks: a three-stage neural
network model with autonomous reinstatement dynamics. Frontiers in Computational Neuroscience, 8,
1–17. 87
F INO , E. & V ENANCE , L. (2010). Spike-timing dependent plasticity in the striatum. Frontiers in Synaptic
Neuroscience, 2, 1–10. 61
F INO , E., G LOWINSKI , J. & V ENANCE , L. (2005). Bidirectional activity-dependent plasticity at corticostriatal synapses. The Journal of neuroscience : the official journal of the Society for Neuroscience, 25,
11279–87. 41, 42, 61, 62
F INO , E., G LOWINSKI , J. & V ENANCE , L. (2007). Effects of acute dopamine depletion on the electrophysiological properties of striatal neurons. Neuroscience research, 58, 305–16. 68
F INO , E., D ENIAU , J.M. & V ENANCE , L. (2008). Cell-specific spike-timing-dependent plasticity in
GABAergic and cholinergic interneurons in corticostriatal rat brain slices. The Journal of physiology,
586, 265–282. 41, 43
F LAGEL , S.B., C LARK , J.J., ROBINSON , T.E., M AYO , L., C ZUJ , A., W ILLUHN , I., A KERS , C. A .,
C LINTON , S.M., P HILLIPS , P.E.M. & A KIL , H. (2011). A selective role for dopamine in stimulusreward learning. Nature, 469, 53–7. 64
F LAHERTY, W.J. & G RAYBIELL , A.M. (1993). Two input systems for body representations in the primate
striatal matrix: experimental evidence in the squirrel monkey. The Journal of neuroscience, 13, 1120–
1137. 47, 118
F LETCHER , P.C. & F RITH , C.D. (2009). Perceiving is believing: a Bayesian approach to explaining the
positive symptoms of schizophrenia. Nature reviews. Neuroscience, 10, 48–58. 71
F RANK , M.J. (2005). Dynamic dopamine modulation in the basal ganglia: a neurocomputational account
of cognitive deficits in medicated and nonmedicated Parkinsonism. Journal of cognitive neuroscience,
17, 51–72. 79, 80, 81, 130
F RANK , M.J. (2006). Hold your horses: A dynamic computational role for the subthalamic nucleus in
decision making. Neural Networks, 19, 1120–1136. 54, 79, 80
F RANK , M.J. & C LAUS , E.D. (2006). Anatomy of a decision: Striato-orbitofrontal interactions in reinforcement learning, decision making, and reversal. Psychological Review, 113, 300–326. 80
F RANK , M.J., S EEBERGER , L.C. & O’ REILLY, R.C. (2004). By carrot or by stick: cognitive reinforcement learning in parkinsonism. Science (New York, N.Y.), 306, 1940–1943. 81, 128
F REEZE , B.S., K RAVITZ , A.V., H AMMACK , N., B ERKE , J.D. & K REITZER , A.C. (2013). Control of
basal ganglia output by direct and indirect pathway projection neurons. The Journal of neuroscience :
the official journal of the Society for Neuroscience, 33, 18531–9. 43, 46, 53
F RÉMAUX , N., S PREKELER , H. & G ERSTNER , W. (2010). Functional requirements for reward-modulated
spike-timing-dependent plasticity. The Journal of neuroscience : the official journal of the Society for
Neuroscience, 30, 13326–13337. 61, 78
F RÉMAUX , N., S PREKELER , H. & G ERSTNER , W. (2013). Reinforcement Learning Using a Continuous
Time Actor-Critic Framework with Spiking Neurons. PLoS Computational Biology, 9, e1003024. 78
F RIEDMAN , A., H OMMA , D., G IBB , L.G., A MEMORI , K. I ., RUBIN , S.J., H OOD , A.S., R IAD , M.H. &
G RAYBIEL , A.M. (2015). A Corticostriatal Path Targeting Striosomes Controls Decision-Making under
Conflict. Cell, 161, 1320–1333. 47, 51, 52
F RISTON , K. (2005). A theory of cortical responses. Philosophical transactions of the Royal Society of
London. Series B, Biological sciences, 360, 815–36. 83
F ROEMKE , R.C., P OO , M. M . & DAN , Y. (2005). Spike-timing-dependent synaptic plasticity depends on
dendritic location. Nature, 2033, 2032–2033. 42, 79
F UJIYAMA , F., U NZAI , T., NAKAMURA , K., N OMURA , S. & K ANEKO , T. (2006). Difference in organization of corticostriatal and thalamostriatal synapses between patch and matrix compartments of rat
neostriatum. European Journal of Neuroscience, 24, 2813–2824. 47, 62
F UJIYAMA , F., S OHN , J., NAKANO , T., F URUTA , T., NAKAMURA , K.C., M ATSUDA , W. & K ANEKO , T.
(2011). Exclusive and common targets of neostriatofugal projections of rat striosome neurons: a single
neuron-tracing study using a viral vector. The European Journal of Neuroscience, 33, 668–677. 46, 47,
50, 57, 58, 115, 116
F UJIYAMA , F., TAKAHASHI , S., K ARUBE , F. & PAMMI , V.S.C. (2015). Morphological elucidation of
basal ganglia circuits contributing reward prediction. Frontiers in Neuroscience, 9, 1–8. 50
G AGE , G.J., S TOETZNER , C.R., W ILTSCHKO , A.B. & B ERKE , J.D. (2010). Selective activation of striatal fast-spiking interneurons during choice execution. Neuron, 67, 466–79. 51
G ARETY, P.A., H EMSLEY, D.R. & W ESSELY, S. (1991). Reasoning in deluded schizophrenic and paranoid patients. Biases in performance on a probabilistic inference task. The Journal of nervous and mental
disease, 179, 194–201. 71
G ERDEMAN , G.L., PARTRIDGE , J.G., L UPICA , C.R. & L OVINGER , D.M. (2003). It could be habit
forming: drugs of abuse and striatal synaptic plasticity. Trends in neurosciences, 26, 184–92. 65
G ERFEN , C., PALETZKI , R. & H EINTZ , N. (2013). GENSAT BAC Cre-Recombinase Driver Lines to
Study the Functional Organization of Cerebral Cortical and Basal Ganglia Circuits. Neuron, 80, 1368–
1383. 39, 50
G ERFEN , C.R. (1984). The neostriatal mosaic: compartmentalization of corticostriatal input and striatonigral output systems. Nature, 311, 461–464. 47, 50
G ERFEN , C.R. (1989). The neostriatal mosaic: striatal patch-matrix organization is related to cortical lamination. Science (New York, N.Y.), 246, 385–8. 47
G ERFEN , C.R. (1992). The neostriatal mosaic: multiple levels of compartmental organization. Trends in
Neurosciences, 15, 133–139. 44, 47
G ERFEN , C.R. (2003). D1 dopamine receptor supersensitivity in the dopamine-depleted striatum animal
model of Parkinson’s disease. The Neuroscientist : a review journal bringing neurobiology, neurology
and psychiatry, 9, 455–462. 68, 128
G ERFEN , C.R. & S URMEIER , D.J. (2011). Modulation of striatal projection systems by dopamine. Annual
review of neuroscience, 34, 441–466. 41, 47, 53, 63
G ERFEN , C.R., H ERKENHAM , M., T HIBAULT, J., B IOCHEMISTRY, C. & F RANCE , C.D. (1987). The
Neostriatal Dopaminergic Mosaic : II . Patch- and Matrix-Directed Mesostriatal Dopaminergic and
Non-Dopaminergic Systems Mesostriatal. Journal of Neuroscience, 7, 3915–3934. 56
G ERFEN , C.R., E NGBER , T.M., M AHAN , L.C., S USEL , Z.V.I., T HOMAS , N., M ONSMA , F.J., S IBLEY,
D.R., S USEL , Z.V.I., C HASE , T.N., M ONSMA , F.J. & S IBLEY, D.R. (1990). D1 and D2 dopamine
receptor-regulated gene expression of striatonigral and striatopallidal neurons. Science (New York, N.Y.),
250, 1429–32. 44
G ERNERT, M., F EDROWITZ , M., W LAZ , P. & L ÖSCHER , W. (2004). Subregional changes in discharge
rate, pattern, and drug sensitivity of putative GABAergic nigral neurons in the kindling model of
epilepsy. European Journal of Neuroscience, 20, 2377–2386. 53
G ERSHMAN , S.J., M OUSTAFA , A.A. & L UDVIG , E.A. (2014). Time representation in reinforcement
learning models of the basal ganglia. Frontiers in Computational Neuroscience, 7, 194. 55, 82
G ERSTNER , W. & K ISTLER , W.M. (2002a). Mathematical formulations of Hebbian learning. Biological
Cybernetics, 87, 404–415. 78
G ERSTNER , W. & K ISTLER , W.M. (2002b). Spiking Neuron Models, vol. 66. Cambridge University Press.
78
G ERTLER , T.S., C HAN , C.S. & S URMEIER , D.J. (2008). Dichotomous anatomical properties of adult
striatal medium spiny neurons. The Journal of neuroscience : the official journal of the Society for
Neuroscience, 28, 10814–10824. 46, 47
G EWALTIG , M.O. & D IESMANN , M. (2007). NEST (NEural Simulation Tool). 75
G ILLIES , A. & A RBUTHNOTT, G. (2000). Computational models of the basal ganglia. Movement disorders
: official journal of the Movement Disorder Society, 15, 762–770. 79
G ITTIS , A.H. & K REITZER , A.C. (2012). Striatal microcircuitry and movement disorders. Trends in Neurosciences, 35, 557–564. 67
G ITTIS , A.H., N ELSON , A.B., T HWIN , M.T., PALOP, J.J. & K REITZER , A.C. (2010). Distinct roles of
GABAergic interneurons in the regulation of striatal output pathways. The Journal of neuroscience : the
official journal of the Society for Neuroscience, 30, 2223–2234. 51
G LÄSCHER , J., DAW, N., DAYAN , P. & O’D OHERTY, J.P. (2010). States versus rewards: Dissociable
neural prediction error signals underlying model-based and model-free reinforcement learning. Neuron,
66, 585–595. 108, 118
G LIMCHER , P.W. (2011). Understanding dopamine and reinforcement learning: the dopamine reward prediction error hypothesis. Proceedings of the National Academy of Sciences of the United States of America, 108 Suppl, 15647–54. 59, 60
G OODMAN , D.F.M. & B RETTE , R. (2009). The brian simulator. Frontiers in Neuroscience, 3, 192–197.
76
G RAYBIEL , A.M. (1990). Neurotransmitters and neuromodulators in the basal ganglia. Trends in neurosciences, 13, 244–54. 46
G RAYBIEL , A.M. (1995). Building action repertoires: Memory and learning functions of the basal ganglia.
43
G RAYBIEL , A.M. (2005). The basal ganglia: learning new tricks and loving it. Current opinion in neurobiology, 15, 638–44. 43
G RAYBIEL , A.M. (2008). Habits, Rituals, and the Evaluative Brain. Annual Review of Neuroscience, 31,
359–387. 47, 67
G RAYBIEL , A .M. & R AGSDALE , C.W. (1978). Histochemically distinct compartments in the striatum of
human, monkeys, and cat demonstrated by acetylthiocholinesterase staining. Proceedings of the National Academy of Sciences of the United States of America, 75, 5723–5726. 46
G RAYBIEL , A.M., H IRSCH , E.C. & AGID , Y.A. (1987). Differences in tyrosine hydroxylase-like immunoreactivity characterize the mesostriatal innervation of striosomes and extrastriosomal matrix at
maturity. Proceedings of the National Academy of Sciences of the United States of America, 84, 303–
307. 47
G RAYBIEL , A.M.A., AOSAKI , T., F LAHERTY, A.A.W. & K IMURA , M. (1994). The basal ganglia and
adaptive motor control. Science, 265, 1826–1831. 51, 52
G RIFFITHS , T.L. & T ENENBAUM , J.B. (2006). Optimal predictions in everyday cognition. Psychological
science, 17, 767–73. 83
G RILLNER , S. & ROBERTSON , B. (2015). The basal ganglia downstream control of brainstem motor
centres—an evolutionarily conserved strategy. Current Opinion in Neurobiology, 33, 47–52. 52
G RILLNER , S., H ELLGREN , J., M ÉNARD , A., S AITOH , K. & W IKSTRÖM , M. A . (2005). Mechanisms for
selection of basic motor programs - Roles for the striatum and pallidum. Trends in Neurosciences, 28,
364–370. 52, 53
G ROMAN , S.M., L EE , B., L ONDON , E.D., M ANDELKERN , M.A., JAMES , A.S., F EILER , K., R IVERA ,
R., DAHLBOM , M., S OSSI , V., VANDERVOORT, E. & J ENTSCH , J.D. (2011). Dorsal Striatal D2Like Receptor Availability Covaries with Sensitivity to Positive Reinforcement during Discrimination
Learning. Journal of Neuroscience, 31, 7291–7299. 110, 111
G UO , L., X IONG , H., K IM , J.I., W U , Y.W., L ALCHANDANI , R.R., C UI , Y., S HU , Y., X U , T. & D ING ,
J.B. (2015). Dynamic rewiring of neural circuits in the motor cortex in mouse models of Parkinson’s
disease. Nature Neuroscience, 1–13. 69
G URNEY, K., P RESCOTT, T.J. & R EDGRAVE , P. (2001a). A computational model of action selection in
the basal ganglia. II. Analysis and simulation of behaviour. Biological Cybernetics, 84, 411–423. 79,
81, 82
G URNEY, K.N., P RESCOTT, T.T.J. & R EDGRAVE , P. (2001b). A computational model of action selection
in the basal ganglia. I. A new functional anatomy. Biological cybernetics, 84, 401–410. 81
G URNEY, K.N., H UMPHRIES , M.D. & R EDGRAVE , P. (2015). A New Framework for Cortico-Striatal
Plasticity: Behavioural Theory Meets In Vitro Data at the Reinforcement-Action Interface. PLoS Biology, 13, e1002034. 61, 79, 109
G UYONNEAU , R., T HORPE , S.J., VAN RULLEN , R. & T HORPE , S.J. (2005). Neurons tune to the earliest
spikes through STDP. Neural computation, 17, 859–879. 79
H ABER , S. (2003). The primate basal ganglia: parallel and integrative networks. Journal of Chemical
Neuroanatomy, 26, 317–330. 52
H AHN , G., B UJAN , A.F., F RÉGNAC , Y., A ERTSEN , A. & K UMAR , A. (2014). Communication through
Resonance in Spiking Neuronal Networks. PLoS computational biology, 10, e1003811. 36
H AMID , A.A., P ETTIBONE , J.R., M ABROUK , O.S., H ETRICK , V.L., S CHMIDT, R., W EELE , C.M.V.,
K ENNEDY, R.T., A RAGONA , B.J. & B ERKE , J.D. (2015). Mesolimbic dopamine signals the value of
work. Nature Neuroscience, 1–13. 59, 60, 61, 114
H ARRINGTON , D.L. & H AALAND , K.Y. (1999). Neural underpinnings of temporal processing. Reviews
in the Neurosciences, 10, 91–116. 126
H ARUNO , M. & K AWATO , M. (2006). Heterarchical reinforcement-learning model for integration of multiple cortico-striatal loops: fMRI examination in stimulus-action-reward association learning. Neural
networks : the official journal of the International Neural Network Society, 19, 1242–54. 81, 118
H EBB , D.O. (1949). The organization of behavior: a neuropsychological theory. Science Education, 44,
335. 19, 25
H ELIE , S., C HAKRAVARTHY, S. & M OUSTAFA , A. A . (2013). Exploring the cognitive and motor functions
of the basal ganglia: an integrative review of computational cognitive neuroscience models. Frontiers in
computational neuroscience, 7, 174. 79
H ÉLIE , S., E LL , S.W. & A SHBY, F.G. (2015). Learning robust cortico-cortical associations with the basal
ganglia: An integrative review. Cortex, 64, 123–135. 120, 121
H ENNY, P., B ROWN , M.T.C., N ORTHROP, A., FAUNES , M., U NGLESS , M. A ., M AGILL , P.J. & B OLAM ,
J.P. (2012). Structural correlates of heterogeneous in vivo activity of midbrain dopaminergic neurons.
Nature Neuroscience, 15, 613–619. 57
H ERNÁDI , I., G RABENHORST, F. & S CHULTZ , W. (2015). Planning activity for internally generated reward goals in monkey amygdala neurons. Nature Neuroscience. 63
H IKOSAKA , O. & I SODA , M. (2010). Switching from automatic to controlled behavior: cortico-basal
ganglia mechanisms. Trends in cognitive sciences, 14, 154–61. 54, 58
H IKOSAKA , O., S AKAMOTO , M. & U SUI , S. (1989). Functional properties of monkey caudate neurons.
I. Activities related to saccadic eye movements. Journal of neurophysiology, 61, 780–98. 47
H IKOSAKA , O., NAKAMURA , K., S AKAI , K. & NAKAHARA , H. (2002). Central mechanisms of motor
skill learning. Current opinion in neurobiology, 12, 217–22. 67
H ILKER , R., VOGES , J., G HAEMI , M., L EHRKE , R., RUDOLF, J., KOULOUSAKIS , A., H ERHOLZ , K.,
W IENHARD , K., S TURM , V. & H EISS , W.D. (2003). Deep brain stimulation of the subthalamic nucleus
does not increase the striatal dopamine concentration in parkinsonian humans. Movement disorders :
official journal of the Movement Disorder Society, 18, 41–48. 69
H INES , M.L. & C ARNEVALE , N.T. (2001). NEURON: a tool for neuroscientists. The Neuroscientist : a
review journal bringing neurobiology, neurology and psychiatry, 7, 123–135. 75
H OLLERMAN , J.R. & S CHULTZ , W. (1998). Dopamine neurons report an error in the temporal prediction
of reward during learning. Nature neuroscience, 1, 304–9. 59, 60
H OLST, A. (1997). The Use of a Bayesian Neural Network Model for Classification Tasks.. Ph.D. thesis,
Stockholm University. 88
H OLTMAAT, A. & S VOBODA , K. (2009). Experience-dependent structural synaptic plasticity in the mammalian brain. Nature reviews. Neuroscience, 10, 647–658. 41
H ONG , S. & H IKOSAKA , O. (2008). The globus pallidus sends reward-related signals to the lateral habenula. Neuron, 60, 720–9. 50, 58
H ONG , S. & H IKOSAKA , O. (2011). Dopamine-mediated learning and switching in cortico-striatal circuit
explain behavioral changes in reinforcement learning. Frontiers in behavioral neuroscience, 5, 15. 58,
59
H OPFIELD , J.J. (1982). Neural networks and physical systems with emergent collective computational
abilities. Proceedings of the National Academy of Sciences of the United States of America, 79, 2554–
2558. 20
H OUK , J.C., A DAMS , J.L. & BARTO , A.G. (1995). A model of how the basal ganglia generate and use
neural signals that predict reinforcement, vol. 13. MIT Press. 50, 63, 81
H OWE , M.W., ATALLAH , H.E., M C C OOL , A., G IBSON , D.J. & G RAYBIEL , A.M. (2011). Habit learning
is associated with major shifts in frequencies of oscillatory activity and synchronized spike firing in
striatum. Proceedings of the National Academy of Sciences, 108, 16801–16806. 66
H UMPHRIES , M.D. & P RESCOTT, T.J. (2010). The ventral basal ganglia, a selection mechanism at the
crossroads of space, strategy, and reward. Progress in Neurobiology, 90, 385–417. 48, 50
H UMPHRIES , M.D., W OOD , R. & G URNEY, K. (2009). Dopamine-modulated dynamic cell assemblies
generated by the GABAergic striatal microcircuit. Neural networks : the official journal of the International Neural Network Society, 22, 1174–88. 79
H YMAN , S.E., M ALENKA , R.C. & N ESTLER , E.J. (2006). NEURAL MECHANISMS OF ADDICTION:
The Role of Reward-Related Learning and Memory. Annual Review of Neuroscience, 29, 565–598. 64
I LANGO , A., K ESNER , A.J., K ELLER , K.L., S TUBER , G.D., B ONCI , A. & I KEMOTO , S. (2014). Similar
roles of substantia nigra and ventral tegmental dopamine neurons in reward and aversion. The Journal
of neuroscience : the official journal of the Society for Neuroscience, 34, 817–22. 44
I RAVANI , M.M., M C C REARY, A.C. & J ENNER , P. (2012). Striatal plasticity in Parkinson’s disease and
L-DOPA induced dyskinesia. Parkinsonism & Related Disorders, 18, S85–S86. 68, 69, 128
I ZHIKEVICH , E.M. (2007). Solving the Distal Reward Problem through Linkage of STDP and Dopamine
Signaling. Cerebral Cortex, 17, 2443–2452. 61, 64, 80, 95
JABER , M., ROBINSON , S.W., M ISSALE , C. & C ARON , M.G. (1996). Dopamine Receptors and Brain
Function. 35, 1503–1519. 46
J I , H. & S HEPARD , P.D. (2007). Lateral habenula stimulation inhibits rat midbrain dopamine neurons
through a GABA(A) receptor-mediated mechanism. The Journal of neuroscience : the official journal
of the Society for Neuroscience, 27, 6923–6930. 58
J IMENEZ -C ASTELLANOS , J. & G RAYBIEL , A.M. (1989). Evidence that histochemically distinct zones of
the primate substantia nigra pars compacta are related to patterned distributions of nigrostriatal projection neurons and striatonigral fibers. Experimental Brain Research, 74, 227–238. 56
J IN , D.Z., F UJII , N. & G RAYBIEL , A.M. (2009). Neural representation of time in cortico-basal ganglia
circuits. Proceedings of the National Academy of Sciences of the United States of America, 106, 19156–
61. 55, 126
J IN , X. & C OSTA , R.M. (2010). Start/stop signals emerge in nigrostriatal circuits during sequence learning.
Nature, 466, 457–462. 55, 64
J IN , X., T ECUAPETLA , F. & C OSTA , R.M. (2014). Basal ganglia subcircuits distinctively encode the
parsing and concatenation of action sequences. Nature neuroscience, 17, 423–430. 54, 55
J ITSEV, J., M ORRISON , A. & T ITTGEMEYER , M. (2012). Learning from positive and negative rewards in
a spiking neural network model of basal ganglia. In The 2012 International Joint Conference on Neural
Networks (IJCNN), 1–8, IEEE. 79, 82
J OEL , D. & W EINER , I. (2000). The connections of the dopaminergic system with the striatum in rats and
primates: An analysis with respect to the functional and compartmental organization of the striatum.
Neuroscience, 96, 451–474. 44
J OEL , D., N IV, Y. & RUPPIN , E. (2002). Actor-critic models of the basal ganglia: new anatomical and
computational perspectives. Neural networks : the official journal of the International Neural Network
Society, 15, 535–47. 30, 79, 81
J OG , M.S., K UBOTA , Y., C ONNOLLY, C.I., H ILLEGAART, V. & G RAYBIEL , A .M. (1999). Building
neural representations of habits. Science (New York, N.Y.), 286, 1745–1749. 65
J OHANSSON , C. (2006). An attarctor memory model of the neocortex. Ph.D. thesis, KTH. 88
J OHANSSON , C., R AICEVIC , P. & L ANSNER , A. (2003). Reinforcement Learning Based on a Bayesian
Confidence Propagating Neural Network. SAIS-SSLS Joint Workshop. 87
J OHNSTON , J.G., G ERFEN , C.R., H ABER , S.N. & VAN DER KOOY, D. (1990). Mechanisms of striatal
pattern formation: conservation of mammalian compartmentalization. Brain research. Developmental
brain research, 57, 93–102. 46
J ONES , S., KORNBLUM , J.L. & K AUER , J.A. (2000). Amphetamine Blocks Long-Term Synaptic Depression in the Ventral Tegmental Area. 20, 5575–5580. 59
J OYCE , J.N., S APP, D.W. & M ARSHALL , J.F. (1986). Human striatal dopamine receptors are organized
in compartments. Proceedings of the National Academy of Sciences of the United States of America, 83,
8002–8006. 44, 46
K AELBLING , L.P., L ITTMAN , M.L. & M OORE , A.W. (1996). Reinforcement learning: A survey. Journal
of Artificial Intelligence Research, 4, 237–285. 21
K ANDEL , E.R., S CHWARTZ , J.H. & J ESSELL , T.M. (2000). Principles of Neural Science, vol. 4. 33
K APLAN , B.A. & L ANSNER , A. (2014). A spiking neural network model of self-organized pattern recognition in the early mammalian olfactory system. Frontiers in Neural Circuits, 8, 5. 87
K APUR , S. (2003). Psychosis as a state of aberrant salience: A framework linking biology, phenomenology,
and pharmacology in schizophrenia. American Journal of Psychiatry, 160, 13–23. 71
K AWAGUCHI , Y. (1993). Physiological, morphological, and histochemical characterization of three classes
of interneurons in rat neostriatum. The Journal of neuroscience : the official journal of the Society for
Neuroscience, 13, 4908–4923. 51
K AWAGUCHI , Y. (1997). Neostriatal cell subtypes and their functional roles. Neuroscience research, 27,
1–8. 50, 51
K AWAGUCHI , Y., W ILSON , C.J., AUGOOD , S.J. & E MSON , P.C. (1995). Striatal interneurones: chemical,
physiological and morphological characterization. Trends in neurosciences, 18, 527–535. 51
K ELSO , S.R., G ANONG , A.H. & B ROWN , T.H. (1986). Hebbian synapses in hippocampus. Proceedings
of the National Academy of Sciences of the United States of America, 83, 5326–5330. 25
K EMP, J.M. & P OWELL , T.P.S. (1971). The Structure of the Caudate Nucleus of the Cat: Light and
Electron Microscopy. 44
K HAMASSI , M. & H UMPHRIES , M.D. (2012). Integrating cortico-limbic-basal ganglia architectures for
learning model-based and model-free navigation strategies. Frontiers in behavioral neuroscience, 6, 79.
108
K IM , H., S UL , J.H., H UH , N., L EE , D. & J UNG , M.W. (2009). Role of striatum in updating values of
chosen actions. The Journal of neuroscience : the official journal of the Society for Neuroscience, 29,
14701–12. 43, 48
K IM , I.H., ROSSI , M.A., A RYAL , D.K., R ACZ , B., K IM , N., U EZU , A., WANG , F., W ETSEL , W.C.,
W EINBERG , R.J., Y IN , H. & S ODERLING , S.H. (2015). Spine pruning drives antipsychotic-sensitive
locomotion via circuit control of striatal dopamine. Nature Neuroscience, 18. 57, 71
K IMCHI , E.Y. & L AUBACH , M. (2009). The dorsomedial striatum reflects response bias during learning.
The Journal of neuroscience : the official journal of the Society for Neuroscience, 29, 14891–902. 48,
110
K IMURA , M., M INAMIMOTO , T., M ATSUMOTO , N. & H ORI , Y. (2004). Monitoring and switching of
cortico-basal ganglia loop functions by the thalamo-striatal system. Neuroscience Research, 48, 335–
360. 54
K INCAID , A.E. & W ILSON , C.J. (1996). Corticostriatal innervation of the patch and matrix in the rat
neostriatum. Journal of Comparative Neurology, 374, 578–592. 47
KOÓS , T. & T EPPER , J.M. (1999). Inhibitory control of neostriatal projection neurons by GABAergic
interneurons. Nature neuroscience, 2, 467–472. 51, 52
KOOS , T. & T EPPER , J.M. (2002). Dual cholinergic control of fast-spiking interneurons in the neostriatum.
Journal of Neuroscience, 22, 529–535. 52
K ÖRDING , K.P. & W OLPERT, D.M. (2004). Bayesian integration in sensorimotor learning. Nature, 427,
244–247. 83
K RAVITZ , A.V., F REEZE , B.S., PARKER , P.R.L., K AY, K., T HWIN , M.T., D EISSEROTH , K. & K RE ITZER , A.C. (2010). Regulation of parkinsonian motor behaviours by optogenetic control of basal ganglia circuitry. Nature, 466, 622–6. 46, 49, 53, 68, 119, 130
K RAVITZ , A.V., T YE , L.D. & K REITZER , A.C. (2012). Distinct roles for direct and indirect pathway
striatal neurons in reinforcement. Nature neuroscience, 1–4. 46, 49, 53
K REISS , D.S., A NDERSON , L.A. & WALTERS , J.R. (1996). Apomorphine and dopamine D1 receptor
agonists increasae the firing rates of subthalamic nucleus neurons. Neuroscience, 72, 863–876. 68
K REITZER , A.C. (2009). Physiology and pharmacology of striatal neurons. Annual review of neuroscience,
32, 127–147. 51
K REITZER , A.C. & M ALENKA , R.C. (2007). Endocannabinoid-mediated rescue of striatal LTD and motor
deficits in Parkinson’s disease models. Nature, 445, 643–647. 68
K REITZER , A.C. & M ALENKA , R.C. (2008). Striatal Plasticity and Basal Ganglia Circuit Function. Neuron, 60, 543–554. 43, 67
K REUTZ , M.R. & S ALA , C. (2012). Synaptic Plasticity, vol. 970 of Advances in Experimental Medicine
and Biology. Springer Vienna, Vienna. 40
K RINGELBACH , M.L., J ENKINSON , N., OWEN , S.L.F. & A ZIZ , T.Z. (2007). Translational principles of
deep brain stimulation. Nature reviews. Neuroscience, 8, 623–635. 69
K UMAR , A., ROTTER , S. & A ERTSEN , A. (2010). Spiking activity propagation in neuronal networks:
reconciling different perspectives on neural coding. Nature reviews. Neuroscience, 11, 615–27. 36
K UMAR , A., C ARDANOBILE , S., ROTTER , S. & A ERTSEN , A. (2011). The Role of Inhibition in Generating and Controlling Parkinson?s Disease Oscillations in the Basal Ganglia. Frontiers in Systems
Neuroscience, 5, 1–14. 69
K WAK , S., H UH , N., S EO , J.S., L EE , J.E., H AN , P.L. & J UNG , M.W. (2014). Role of dopamine D2
receptors in optimizing choice strategy in a dynamic and uncertain environment. Frontiers in Behavioral
Neuroscience, 8, 1–15. 110
L AK , A., S TAUFFER , W.R. & S CHULTZ , W. (2014). Dopamine prediction error responses integrate subjective value from different reward dimensions. Proceedings of the National Academy of Sciences of the
United States of America, 111, 2343–8. 63
L AMMEL , S., I ON , D.I., ROEPER , J. & M ALENKA , R.C. (2011). Projection-Specific Modulation of
Dopamine Neuron Synapses by Aversive and Rewarding Stimuli. Neuron, 70, 855–862. 56
L AMMEL , S., L IM , B.K., R AN , C., H UANG , K.W., B ETLEY, M.J., T YE , K.M., D EISSEROTH , K. &
M ALENKA , R.C. (2012). Input-specific control of reward and aversion in the ventral tegmental area.
Nature, 491, 212–7. 56, 58, 117
L AMMEL , S., L IM , B.K. & M ALENKA , R.C. (2014). Reward and aversion in a heterogeneous midbrain
dopamine system. Neuropharmacology, 76, 351–359. 56
L ANGER , L.F. & G RAYBIEL , A .M. (1989). Distinct nigrostriatal projection systems innervate striosomes
and matrix in the primate striatum. Brain research, 498, 344–350. 56
L ANSNER , A. (2009). Associative memory models: from the cell-assembly theory to biophysically detailed
cortex simulations. Trends in neurosciences, 32, 178–86. 87, 108
L ANSNER , A. & D IESMANN , M. (2012). Virtues, Pitfalls, and Methodology of Neuronal NetworkModeling and Simulations on Supercomputers. Computational Systems Neurobiology, 283–315. 76
L ANSNER , A. & E KEBERG , Ö. (1989). A one-layer feedback artificial neural network with a Bayesian
learning rule. 87, 88
L ANSNER , A. & H OLST, A. (1996). A higher order Bayesian neural network with spiking units. International Journal of Neural Systems, 7, 115–128. 88
L AU , B. & G LIMCHER , P.W. (2008). Value representations in the primate striatum during matching behavior. Neuron, 58, 451–463. 43, 55
L AVIN , A., N OGUEIRA , L., L APISH , C.C., W IGHTMAN , R.M., P HILLIPS , P.E.M. & S EAMANS , J.K.
(2005). Mesocortical dopamine neurons operate in distinct temporal domains using multimodal signaling. The Journal of neuroscience : the official journal of the Society for Neuroscience, 25, 5013–5023.
61
L EGENSTEIN , R., P ECEVSKI , D. & M AASS , W. (2008). A learning theory for reward-modulated spiketiming-dependent plasticity with application to biofeedback. PLoS computational biology, 4, e1000180.
61
L EHÉRICY, S., D UCROS , M., VAN DE M OORTELE , P.F., F RANCOIS , C., T HIVARD , L., P OUPON , C.,
S WINDALE , N., U GURBIL , K. & K IM , D.S. (2004). Diffusion tensor fiber tracking shows distinct
corticostriatal circuits in humans. Annals of neurology, 55, 522–9. 52
L ENZ , J.D. & L OBO , M.K. (2013). Optogenetic insights into striatal function and behavior. Behavioural
Brain Research, 255, 44–54. 39, 46
L ERNER , T.N., S HILYANSKY, C., DAVIDSON , T.J., E VANS , K.E., B EIER , K.T., Z ALOCUSKY, K.A.,
C ROW, A.K., M ALENKA , R.C., L UO , L., T OMER , R. & D EISSEROTH , K. (2015). Intact-Brain Analyses Reveal Distinct Information Carried by SNc Dopamine Subcircuits. Cell, 162, 635–647. 39, 56,
57, 117
L EVENTHAL , D.K., S TOETZNER , C.R., A BRAHAM , R., P ETTIBONE , J., D E M ARCO , K. & B ERKE ,
J.D. (2014). Dissociable effects of dopamine on learning and performance within sensorimotor striatum.
Basal Ganglia, 4, 43–54. 63
L ÉVESQUE , M. & PARENT, A. (2005). The striatofugal fiber system in primates: a reevaluation of its
organization based on single-axon tracing studies. Proceedings of the National Academy of Sciences of
the United States of America, 102, 11888–11893. 50
L EVEY, A.I., H ERSCH , S.M., RYE , D.B., S UNAHARA , R.K., N IZNIK , H.B., K ITT, C. A ., P RICE , D.L.,
M AGGIO , R., B RANN , M.R. & C ILIAX , B.J. (1993). Localization of D1 and D2 dopamine receptors
in brain with subtype-specific antibodies. Proceedings of the National Academy of Sciences, 90, 8861–
8865. 64
L I , C.T., L AI , W.S., L IU , C.M. & H SU , Y. F. (2014a). Inferring reward prediction errors in patients with
schizophrenia: a dynamic reward task for reinforcement learning. Frontiers in Psychology, 5, 1–10. 71
L I , Z., L IU , J., Z HENG , M. & X U , X.S. (2014b). Encoding of Both Analog- and Digital-like Behavioral
Outputs by One C. elegans Interneuron. Cell, 159, 751–765. 36
L INDAHL , M., K AMALI S ARVESTANI , I., E KEBERG , O. & KOTALESKI , J.H. (2013). Signal enhancement in the output stage of the basal ganglia by synaptic short-term plasticity in the direct, indirect, and
hyperdirect pathways. Frontiers in computational neuroscience, 7, 76. 41
L ISMAN , J. (2014). Two-phase model of the basal ganglia: implications for discontinuous control of the
motor system. Philosophical Transactions of the Royal Society B: Biological Sciences, 369, 20130489–
20130489. 55
L IU , Q. S ., P U , L. & P OO , M. M . (2005). Repeated cocaine exposure in vivo facilitates LTP induction in
midbrain dopamine neurons. Nature, 437, 1027–1031. 59
L O , C.C. & WANG , X.J. (2006). Cortico-basal ganglia circuit mechanism for a decision threshold in
reaction time tasks. Nature neuroscience, 9, 956–63. 123
L ÓPEZ -H UERTA , V.G., C ARRILLO -R EID , L., G ALARRAGA , E., TAPIA , D., F IORDELISIO , T.,
D RUCKER -C OLIN , R. & BARGAS , J. (2013). The balance of striatal feedback transmission is disrupted in a model of parkinsonism. The Journal of neuroscience : the official journal of the Society for
Neuroscience, 33, 4964–75. 68
L OZANO , A.M., L ANG , A.E., G ALVEZ -J IMENEZ , N., M IYASAKI , J., D UFF , J., H UTCHINSON , W.D.
& D OSTROVSKY, J.O. (1995). Effect of GPi pallidotomy on motor function in Parkinson’s disease.
Lancet, 346, 1383–1387. 69
L UNDQVIST, M., R EHN , M. & L ANSNER , A. (2006). Attractor dynamics in a modular network model of
the cerebral cortex. Neurocomputing, 69, 1155–1159. 108
L UNDQVIST, M., C OMPTE , A. & L ANSNER , A. (2010). Bistable, irregular firing and population oscillations in a modular attractor memory network. PLoS Computational Biology, 6, 1–12. 87
L ÜSCHER , C. & M ALENKA , R.C. (2011). Drug-Evoked Synaptic Plasticity in Addiction: From Molecular
Changes to Circuit Remodeling. Neuron, 69, 650–663. 59, 64, 65
LYND -BALTA , E. & H ABER , S.N. (1994). The organization of midbrain projections to the striatum in the
primate: Sensorimotor-related striatum versus ventral striatum. Neuroscience, 59, 625–640. 56
M AFFEI , A. & F ONTANINI , A. (2009). Network homeostasis: a matter of coordination. Current Opinion
in Neurobiology, 19, 168–173. 42
M AIA , T.V. & F RANK , M.J. (2011). From reinforcement learning models to psychiatric and neurological
disorders. Nature Neuroscience, 14, 154–162. 67, 81
M ALACH , R. & G RAYBIEL , A.M. (1986). Mosaic architecture of the somatic sensory-recipient sector of
the cat’s striatum. The Journal of neuroscience : the official journal of the Society for Neuroscience, 6,
3436–58. 47
M ANA , S. & C HEVALIER , G. (2001). The fine organization of nigro-collicular channels with additional
observations of their relationships with acetylcholinesterase in the rat. Neuroscience, 106, 357–374. 53
M ARKRAM , H., L ÜBKE , J., F ROTSCHER , M. & S AKMANN , B. (1997). Regulation of synaptic efficacy
by coincidence of postsynaptic APs and EPSPs. Science (New York, N.Y.), 275, 213–215. 42
M ARR , D. (1982). Vision: A Computational Investigation into the Human Representation And. W.H. Freeman. 19
M ARSDEN , C.D. & O BESO , J.A. (1994). The functions of the basal ganglia and the paradox of stereotaxic
surgery in Parkinson’s disease. Brain, 117, 877–897. 54
M ATELL , M.S. & M ECK , W.H. (2004). Cortico-striatal circuits and interval timing: coincidence detection
of oscillatory processes. Cognitive Brain Research, 21, 139–170. 55, 82, 125, 126
M ATSUDA , W., F URUTA , T., NAKAMURA , K.C., H IOKI , H., F UJIYAMA , F., A RAI , R. & K ANEKO ,
T. (2009). Single nigrostriatal dopaminergic neurons form widely spread and highly dense axonal arborizations in the neostriatum. The Journal of neuroscience : the official journal of the Society for
Neuroscience, 29, 444–453. 56
M ATSUMOTO , K. & TANAKA , K. (2004). The role of the medial prefrontal cortex in achieving goals.
Current opinion in neurobiology, 14, 178–185. 118
M ATSUMOTO , M. & H IKOSAKA , O. (2007). Lateral habenula as a source of negative reward signals in
dopamine neurons. Nature, 447, 1111–5. 56, 58, 59
M ATSUMOTO , M. & H IKOSAKA , O. (2009a). Representation of negative motivational value in the primate
lateral habenula. Nature neuroscience, 12, 77–84. 58
M ATSUMOTO , M. & H IKOSAKA , O. (2009b). Two types of dopamine neuron distinctly convey positive
and negative motivational signals. Nature, 459, 837–41. 56, 58
M AUK , M.D. & B UONOMANO , D.V. (2004). The neural basis of temporal processing. Annual review of
neuroscience, 27, 307–340. 55
M AYSE , J.D., N ELSON , G.M., AVILA , I., G ALLAGHER , M. & L IN , S. C . (2015). Basal forebrain neuronal
inhibition enables rapid behavioral stopping. Nature Neuroscience, 1–11. 54
M C D ONNELL , M.D., I KEDA , S. & M ANTON , J.H. (2011). An introductory review of information theory
in the context of computational neuroscience. Biological cybernetics, 105, 55–70. 35
M C G EORGE , A. & FAULL , R. (1989). The organization of the projection from the cerebral cortex to the
striatum in the rat. Neuroscience, 29, 503–537. 44
M C H AFFIE , J.G., S TANFORD , T.R., S TEIN , B.E., C OIZET, V. & R EDGRAVE , P. (2005). Subcortical
loops through the basal ganglia. Trends in neurosciences, 28, 401–7. 54
M C H AFFIE , J.G., J IANG , H., M AY, P.J., C OIZET, V., OVERTON , P.G., S TEIN , B.E. & R EDGRAVE ,
P. (2006). A direct projection from superior colliculus to substantia nigra pars compacta in the cat.
Neuroscience, 138, 221–34. 63
M EAD , C. (1990). Neuromorphic electronic systems. Proceedings of the IEEE, 78, 1629–1636. 76
M EIER , M.H., C ASPI , A., R EICHENBERG , A., K EEFE , R.S.E., F ISHER , H.L., H ARRINGTON , H.,
H OUTS , R., P OULTON , R. & M OFFITT, T.E. (2014). Neuropsychological decline in schizophrenia
from the premorbid to the postonset period: Evidence from a population-representative longitudinal
study. American Journal of Psychiatry, 171, 91–101. 70
M ELI , C. & L ANSNER , A. (2013). A modular attractor associative memory with patchy connectivity and
weight pruning. Network (Bristol, England), 24, 129–50. 87, 108
M ENGUAL , E., DE LAS H ERAS , S., E RRO , E., L ANCIEGO , J.L. & G IMÉNEZ -A MAYA , J.M. (1999).
Thalamic interaction between the input and the output systems of the basal ganglia. Journal of chemical
neuroanatomy, 16, 187–200. 52, 53, 54
M ERKER , B. (2007). Consciousness without a cerebral cortex: a challenge for neuroscience and medicine.
The Behavioral and brain sciences, 30, 63–81; discussion 81–134. 17
M INK , J.W. (1996). The basal ganglia: focused selection and inhibition of competing motor programs.
Progress in neurobiology, 50, 381–425. 43, 52, 53, 111
M INK , J.W., B LUMENSCHINE , R.J. & A DAMS , D.B. (1981). Ratio of central nervous system to body
metabolism in vertebrates: its constancy and functional basis. The American journal of physiology, 241,
R203–R212. 36
M IYAZAKI , K.W., M IYAZAKI , K., TANAKA , K.F., YAMANAKA , A., TAKAHASHI , A., TABUCHI , S. &
D OYA , K. (2014). Optogenetic Activation of Dorsal Raphe Serotonin Neurons Enhances Patience for
Future Rewards. Curbio, 24, 2033–2040. 127
M OBINI , S., C HIANG , T.J., H O , M.Y., B RADSHAW, C. & S ZABADI , E. (2000). Effects of central 5hydroxytryptamine depletion on sensitivity to delayed and probabilistic reinforcement. Psychopharmacology, 152, 390–397. 127
M ONTAGUE , P., DAYAN , P. & S EJNOWSKI , T.J. (1996). A framework for mesencephalic dopamine systems based on predictive Hebbian learning. The Journal of Neuroscience, 16, 1936–1947. 60, 81
M ORITA , K., M ORISHIMA , M., S AKAI , K. & K AWAGUCHI , Y. (2012). Reinforcement learning: Computing the temporal difference of values via distinct corticostriatal pathways. Trends in Neurosciences,
35, 457–467. 49, 80
M ORRIS , G., N EVET, A., A RKADIR , D., VAADIA , E. & B ERGMAN , H. (2006). Midbrain dopamine
neurons encode decisions for future action. Nature neuroscience, 9, 1057–63. 60
M OSER , E.I., K ROPFF , E. & M OSER , M.B. (2008). Place cells, grid cells, and the brain’s spatial representation system. Annual review of neuroscience, 31, 69–89. 35, 38
M OUNTCASTLE , V.B. (1997). The columnar organization of the neocortex. Brain, 120, 701–722. 38
M OUSTAFA , A.A., BAR -G AD , I., KORNGREEN , A. & B ERGMAN , H. (2014). Basal ganglia: physiological, behavioral, and computational studies. Frontiers in Systems Neuroscience, 8, 8–11. 79
M URRAY, G.K., C ORLETT, P.R., C LARK , L., P ESSIGLIONE , M., B LACKWELL , A.D. & H ONEY, G.
(2008). Substantia nigra / ventral tegmental reward prediction error disruption in psychosis. October,
13. 71
NABAVI , S., F OX , R., P ROULX , C.D., L IN , J.Y., T SIEN , R.Y. & M ALINOW, R. (2014). Engineering a
memory with LTD and LTP. Nature, 511, 348–352. 41
NAIR , A.G., G UTIERREZ -A RENAS , O., E RIKSSON , O., V INCENT, P. & H ELLGREN -KOTALESKI , J.
(2015). Sensing positive versus negative reward signals through adenylyl cyclase coupled GPCRs in
direct and indirect pathway striatal medium spiny neurons. Journal of neuroscience, in press. 62
NAKAHARA , H., I TOH , H., K AWAGOE , R., TAKIKAWA , Y. & H IKOSAKA , O. (2004). Dopamine neurons
can represent context-dependent prediction error. Neuron, 41, 269–80. 63
NAKAMURA , K.C., F UJIYAMA , F., F URUTA , T., H IOKI , H. & K ANEKO , T. (2009). Afferent islands are
larger than mu-opioid receptor patch in striatum of rat pups. NeuroReport, 20, 584–588. 46
NAMBU , A. (2004). A new dynamic model of the cortico-basal ganglia loop. 143, 461–466. 54, 55
NAMBU , A. (2008). Seven problems on the basal ganglia. Current opinion in neurobiology, 18, 595–604.
43, 53
NAMBU , A. (2011). Somatotopic organization of the primate Basal Ganglia. Frontiers in neuroanatomy, 5,
26. 54
NAMBU , A., T OKUNO , H. & TAKADA , M. (2002). Functional significance of the cortico-subthalamopallidal ’hyperdirect’ pathway. Neuroscience Research, 43, 111–117. 54
NAMBURI , P., B EYELER , A., YOROZU , S., C ALHOON , G.G., H ALBERT, S. A ., W ICHMANN , R.,
H OLDEN , S.S., M ERTENS , K.L., A NAHTAR , M., F ELIX -O RTIZ , A.C., W ICKERSHAM , I.R., G RAY,
J.M. & T YE , K.M. (2015). A circuit mechanism for differentiating positive and negative associations.
Nature, 520, 675–678. 59
N ELSON , A.B., H AMMACK , N., YANG , C.F., S HAH , N.M., S EAL , R.P. & K REITZER , A.C. (2014).
Striatal cholinergic interneurons drive GABA release from dopamine terminals. Neuron, 82, 63–70. 52,
62
N EWMAN , H., L IU , F.C. & G RAYBIEL , A.M. (2015). Dynamic ordering of early generated striatal cells
destined to form the striosomal compartment of the striatum. Journal of Comparative Neurology, 523,
943–962. 46
N ICOLA , S.M., S URMEIER , J., M ALENKA , R.C., S URMEIER , D.J. & M ALENKA , R.C. (2000).
Dopaminergic modulation of neuronal excitability in the striatum and nucleus accumbens. Annual review of neuroscience, 23, 185–215. 46, 51
N IEH , E.H., K IM , S.Y., NAMBURI , P. & T YE , K.M. (2013). Optogenetic dissection of neural circuits
underlying emotional valence and motivated behaviors. Brain Research, 1511, 73–92. 49, 57
N IEH , E.H., M ATTHEWS , G. A ., A LLSOP, S. A ., P RESBREY, K.N., L EPPLA , C. A ., W ICHMANN , R.,
N EVE , R., W ILDES , C.P. & T YE , K.M. (2015). Decoding Neural Circuits that Control Compulsive
Sucrose Seeking. Cell, 160, 1–14. 56, 57, 116, 117
N ISENBAUM , E.S. & W ILSON , C.J. (1995). Potassium currents responsible for inward and outward rectification in rat neostriatal spiny projection neurons. The Journal of neuroscience : the official journal of
the Society for Neuroscience, 15, 4449–4463. 47
N ISHIOKU , T., S HIMAZOE , T., YAMAMOTO , Y., NAKANISHI , H. & WATANABE , S. (1999). Expression
of long-term potentiation of the striatum in methamphetamine-sensitized rats. Neuroscience letters, 268,
81–84. 65
N IV, Y., D UFF , M.O. & DAYAN , P. (2005). Dopamine, uncertainty and TD learning. Behavioral and brain
functions : BBF, 1, 6. 81
O BESO , J.A., RODRIGUEZ -O ROZ , M.C., RODRIGUEZ , M., L ANCIEGO , J.L., A RTIEDA , J., G ONZALO ,
N. & O LANOW, C.W. (2000). Pathophysiology of the basal ganglia in Parkinson’s disease. Trends in
Neurosciences, 23, S8–S19. 69
O BESO , J. A ., RODRIGUEZ -O ROZ , M.C., L ANCIEGO , J.L., RODRIGUEZ D IAZ , M., B EZARD , E.,
G ROSS , C.E. & B ROTCHIE , J.M. (2004). How does Parkinson’s disease begin? The role of compensatory mechanisms (multiple letters). Trends in Neurosciences, 27, 125–128. 68, 128
O BESO , J.A., M ARIN , C., RODRIGUEZ -O ROZ , C., B LESA , J., B ENITEZ -T EMIÑO , B., M ENA S EGOVIA , J., RODRÍGUEZ , M. & O LANOW, C.W. (2008). The basal ganglia in Parkinson’s disease:
current concepts and unexplained observations. Annals of neurology, 64 Suppl 2, S30–46. 68
O’D OHERTY, J.P., DAYAN , P., F RISTON , K., C RITCHLEY, H. & D OLAN , R.J. (2003). Temporal difference models and reward-related learning in the human brain. Neuron, 38, 329–337. 28, 49
O’D OHERTY, J.P., B UCHANAN , T.W., S EYMOUR , B. & D OLAN , R.J. (2006). Predictive neural coding
of reward preference involves dissociable responses in human ventral midbrain and ventral striatum.
Neuron, 49, 157–166. 48
O H , S.W., H ARRIS , J. A ., N G , L., W INSLOW, B., C AIN , N., M IHALAS , S., WANG , Q., L AU , C.,
K UAN , L., H ENRY, A.M., M ORTRUD , M.T., O UELLETTE , B., N GUYEN , T.N., S ORENSEN , S. A .,
S LAUGHTERBECK , C.R., WAKEMAN , W., L I , Y., F ENG , D., H O , A., N ICHOLAS , E., H IROKAWA ,
K.E., B OHN , P., J OINES , K.M., P ENG , H., H AWRYLYCZ , M.J., P HILLIPS , J.W., H OHMANN , J.G.,
W OHNOUTKA , P., G ERFEN , C.R., KOCH , C., B ERNARD , A., DANG , C., J ONES , A.R. & Z ENG , H.
(2014). A mesoscale connectome of the mouse brain. Nature, 508, 207–14. 39
O HMAE , S. & M EDINA , J.F. (2015). Climbing fibers encode a temporal-difference prediction error during
cerebellar learning in mice. Nature Neuroscience, 29, 1–7. 63
O JA , E. (1982). A simplified neuron model as a principal component analyzer. Journal of mathematical
biology, 15, 267–273. 77
O KADA , K. I ., T OYAMA , K., I NOUE , Y., I SA , T. & KOBAYASHI , Y. (2009). Different Pedunculopontine
Tegmental Neurons Signal Predicted and Actual Task Rewards. Journal of Neuroscience, 29, 4858–
4870. 56
O’K EEFE , J. & D OSTROVSKY, J. (1971). The hippocampus as a spatial map. Preliminary evidence from
unit activity in the freely-moving rat. Brain research, 34, 171–175. 35
O LVECZKY, B.P., A NDALMAN , A.S., F EE , M.S., Ö LVECZKY, B.P., A NDALMAN , A.S., F EE , M.S.,
O LVECZKY, B.P., A NDALMAN , A.S. & F EE , M.S. (2005). Vocal experimentation in the juvenile songbird requires a basal ganglia circuit. PLoS biology, 3, e153. 66
O MELCHENKO , N. & S ESACK , S.R. (2009). Ultrastructural analysis of local collaterals of rat ventral
tegmental area neurons: GABA phenotype and synapses onto dopamine and GABA cells. Synapse, 63,
895–906. 58
O’R EILLY, R.C. & F RANK , M.J. (2006). Making working memory work: a computational model of
learning in the prefrontal cortex and basal ganglia. Neural computation, 18, 283–328. 64, 79, 81
OYAMA , K., H ERNÁDI , I., I IJIMA , T. & T SUTSUI , K.I. (2010). Reward prediction error coding in dorsal
striatal neurons. The Journal of neuroscience : the official journal of the Society for Neuroscience, 30,
11447–57. 49, 59, 60
PAILLE , V., F INO , E., D U , K., M ORERA -H ERRERAS , T., P EREZ , S., KOTALESKI , J.H. & V ENANCE ,
L. (2013). GABAergic Circuits Control Spike-Timing-Dependent Plasticity. Journal of Neuroscience,
33, 9353–9363. 42, 61
PAN , W.X., B ROWN , J. & D UDMAN , J.T. (2013). Neural signals of extinction in the inhibitory microcircuit of the ventral midbrain. Nature neuroscience, 16, 71–8. 58, 60
PARENT, A. (1990). Extrinsic connections of the basal ganglia. Trends in Neurosciences, 13, 254–258. 44
PARENT, A. & H AZRATI , L.N. (1995). Functional anatomy of the basal ganglia. II. The place of subthalamic nucleus and external pallidium in basal ganglia circuitry. Brain Research Reviews, 20, 128–154.
44
PARVAZ , M.A., KONOVA , A.B., P ROUDFIT, G.H., D UNNING , J.P., M ALAKER , P., M OELLER , S.J.,
M ALONEY, T., A LIA -K LEIN , N. & G OLDSTEIN , R.Z. (2015). Impaired Neural Response to Negative
Prediction Errors in Cocaine Addiction. Journal of Neuroscience, 35, 1872–1879. 65
PAVLOV, I.P. (1927). Conditioned Reflexes, vol. 17. 22, 24
PAWLAK , V. & K ERR , J.N.D. (2008). Dopamine receptor activation is required for corticostriatal spiketiming-dependent plasticity. The Journal of neuroscience : the official journal of the Society for Neuroscience, 28, 2435–46. 41, 42, 60, 62
PAWLAK , V., W ICKENS , J.R., K IRKWOOD , A. & K ERR , J.N.D. (2010). Timing is not everything: Neuromodulation opens the STDP gate. Frontiers in Synaptic Neuroscience, 2, 1–14. 61
P ENNEY, J.B. & YOUNG , A.B. (1981). GABA as the pallidothalamic neurotransmitter: implications for
basal ganglia function. Brain Research, 207, 195–199. 53
P ERIN , R., B ERGER , T.K. & M ARKRAM , H. (2011). A synaptic organizing principle for cortical neuronal
groups. Proceedings of the National Academy of Sciences of the United States of America, 108, 5419–
5424. 38
P FISTER , J.P., DAYAN , P. & L ENGYEL , M. (2010). Synapses with short-term plasticity are optimal estimators of presynaptic membrane potentials. Nature neuroscience, 13, 1271–5. 41
P LANERT, H., S ZYDLOWSKI , S.N., H JORTH , J.J.J., G RILLNER , S. & S ILBERBERG , G. (2010). Dynamics of synaptic transmission between fast-spiking interneurons and striatal projection neurons of
the direct and indirect pathways. The Journal of neuroscience : the official journal of the Society for
Neuroscience, 30, 3499–507. 51, 52
P LENZ , D. & K ITAL , S.T. (1999). A basal ganglia pacemaker formed by the subthalamic nucleus and
external globus pallidus. Nature, 400, 677–682. 54
P OMBAL , M. A ., E L M ANIRA , A. & G RILLNER , S. (1997). Organization of the lamprey striatum - Transmitters and projections. Brain Research, 766, 249–254. 43
P OTJANS , W., M ORRISON , A. & D IESMANN , M. (2009). A spiking neural network model of an actorcritic learning agent. Neural computation, 21, 301–339. 78, 80, 82
P OTJANS , W., M ORRISON , A. & D IESMANN , M. (2010). Enabling functional neural circuit simulations
with distributed computing of neuromodulated plasticity. Frontiers in computational neuroscience, 4,
141. 101
P OTJANS , W., D IESMANN , M. & M ORRISON , A. (2011). An Imperfect Dopaminergic Error Signal Can
Drive Temporal-Difference Learning. PLoS Computational Biology, 7. 82
P OTTS , G.F., M ARTIN , L.E., B URTON , P. & M ONTAGUE , P.R. (2006). When things are better or worse
than expected: the medial frontal cortex and the allocation of processing resources. Journal of cognitive
neuroscience, 18, 1112–1119. 64
P RENSA , L. & PARENT, A . (2001). The nigrostriatal pathway in the rat: A single-axon study of the relationship between dorsal and ventral tier nigral neurons and the striosome/matrix striatal compartments.
The Journal of neuroscience : the official journal of the Society for Neuroscience, 21, 7247–7260. 56
P REZIOSO , M., M ERRIKH -BAYAT, F., H OSKINS , B.D., A DAM , G.C., L IKHAREV, K.K. & S TRUKOV,
D.B. (2015). Training and operation of an integrated neuromorphic network based on metal-oxide memristors. Nature, 521, 61–64. 77
P RIEBE , N.J. & F ERSTER , D. (2012). Mechanisms of neuronal computation in mammalian visual cortex.
Neuron, 75, 194–208. 35
P UIG , M., A NTZOULATOS , E. & M ILLER , E. (2014). Prefrontal dopamine in associative learning and
memory. Neuroscience, 282, 217–229. 60
P YNN , L.K. & D E S OUZA , J.F.X. (2013). The function of efference copy signals: implications for symptoms of schizophrenia. Vision research, 76, 124–33. 71
Q UINA , L.A., T EMPEST, L., N G , L., H ARRIS , J., F ERGUSON , S., J HOU , T. & T URNER , E.E. (2014).
Efferent pathways of the mouse lateral habenula. The Journal of comparative neurology, 60, 32–60. 58
Q UIROGA , R. (2012). Concept cells: the building blocks of declarative memory functions. Nature Publishing Group, 13, 587–597. 37
Q UIROGA , R.Q., R EDDY, L., K REIMAN , G., KOCH , C. & F RIED , I. (2005). Invariant visual representation by single neurons in the human brain. Nature, 435, 1102–1107. 37
R AITERI , M. (2006). Functional pharmacology in human brain. Pharmacological reviews, 58, 162–193.
39
R AKIC , P. (2002). Neurogenesis in adult primate neocortex: an evaluation of the evidence. Nature reviews.
Neuroscience, 3, 65–71. 39
R AMÓN Y C AJAL , S. (1894). The Croonian Lecture: La Fine Structure des Centres Nerveux. Proceedings
of the Royal Society of London, 55, 444–468. 40
R ANGEL , A., C AMERER , C. & M ONTAGUE , P.R. (2008). A framework for studying the neurobiology of
value-based decision making. Nature reviews. Neuroscience, 9, 545–556. 26
R EDGRAVE , P. & G URNEY, K. (2006). The short-latency dopamine signal: a role in discovering novel
actions? Nature reviews. Neuroscience, 7, 967–75. 55, 64, 117
R EDGRAVE , P., P RESCOTT, T.J. & G URNEY, K.N. (1999). The basal ganglia: A vertebrate solution to the
selection problem? Neuroscience, 89, 1009–1023. 43, 52, 81
R EDGRAVE , P., G URNEY, K. & R EYNOLDS , J. (2008). What is reinforced by phasic dopamine signals?
Brain Research Reviews, 58, 322–339. 64
R EDGRAVE , P., G URNEY, K., S TAFFORD , T., T HIRKETTLE , M. & L EWIS , J. (2013). Intrinsically Motivated Learning in Natural and Artificial Systems. Springer Berlin Heidelberg, Berlin, Heidelberg. 63
R EDISH , A.D. (2004). Addiction as a Computational Process Gone Awry. Science, 306, 1944–1947. 66
R EIG , R. & S ILBERBERG , G. (2014). Multisensory Integration in the Mouse Striatum. Neuron, 83, 1200–
1212. 48
R EINER , A., M EDINA , L. & V EENMAN , C. (1998). Structural and functional evolution of the basal ganglia
in vertebrates. Brain Research Reviews, 28, 235–285. 43
R EINER , A., H ART, N.M., L EI , W. & D ENG , Y. (2010). Corticostriatal projection neurons - dichotomous
types and dichotomous functions. Frontiers in neuroanatomy, 4, 142. 47
R EINIUS , B., B LUNDER , M., B RETT, F.M., E RIKSSON , A., PATRA , K., J ONSSON , J., JAZIN , E., K UL LANDER , K. & H OLLIS , F. (2015). Conditional targeting of medium spiny neurons in the striatal matrix.
Frontiers in Behavioral Neuroscience, 9, 1–14. 70
R ESCORLA , R.A. (1988). Pavlovian conditioning. It’s not what you think it is. The American psychologist,
43, 151–160. 23
R ESCORLA , R. A . (2004). Spontaneous recovery. Learning & memory (Cold Spring Harbor, N.Y.), 11, 501–
9. 24
R ESCORLA , R.A. & WAGNER , A.R. (1972). A Theory of Pavlovian Conditioning: Variations in the Effectiveness of Reinforcement and Nonreinforcement. New York: Classical Conditioning II:. 23, 26
R EYNOLDS , J. & W ICKENS , J. (2002). Dopamine-dependent plasticity of corticostriatal synapses. Neural
Networks, 15, 507–521. 41, 42, 60, 61
R EYNOLDS , J.N., H YLAND , B.I. & W ICKENS , J.R. (2001). A cellular mechanism of reward-related
learning. Nature, 413, 67–70. 60
R ICK , S. (2011). Losses, gains, and brains: Neuroeconomics can help to answer open questions about loss
aversion. Journal of Consumer Psychology, 21, 453–463. 115
R IEKE , F., WARLAND , D., D E RUYTER VAN S TEVENINCK , R. & B IALEK , W. (1997). Spikes: Exploring
the Neural Code, vol. 20. 86
R IVEST, F., K ALASKA , J.F. & B ENGIO , Y. (2010). Alternative time representation in dopamine models.
Journal of computational neuroscience, 28, 107–30. 55, 82
ROCKLAND , K.S. (2010). Five points on columns. Frontiers in neuroanatomy, 4, 22. 38
ROEPER , J. (2013). Dissecting the diversity of midbrain dopamine neurons. Trends in Neurosciences, 36,
336–342. 56
ROMANELLI , P., E SPOSITO , V., S CHAAL , D.W. & H EIT, G. (2005). Somatotopy in the basal ganglia:
experimental and clinical evidence for segregated sensorimotor channels. Brain research. Brain research
reviews, 48, 112–28. 52, 53
ROOT, D.H., M EJIAS - APONTE , C. A ., Z HANG , S., WANG , H. L ., H OFFMAN , A.F., L UPICA , C.R. &
M ORALES , M. (2014). Single rodent mesohabenular axons release glutamate and GABA. 17. 34, 93
ROSENBLATT, F. (1958). The perceptron: a probabilistic model for information storage and organization
in the brain. Psychological review, 65, 386–408. 20
RUAN , H., S AUR , T. & YAO , W.D. (2014). Dopamine-enabled anti-Hebbian timing-dependent plasticity
in prefrontal circuitry. Frontiers in neural circuits, 8, 38. 60
S AHA , S., C HANT, D., W ELHAM , J. & M C G RATH , J. (2005). A systematic review of the prevalence of
schizophrenia. PLoS Medicine, 2, 0413–0433. 70
S ALMON , D.P. & B UTTERS , N. (1995). Neurobiology of skill and habit learning. Current opinion in
neurobiology, 5, 184–90. 67
S AMEJIMA , K., U EDA , Y., D OYA , K. & K IMURA , M. (2005). Representation of action-specific reward
values in the striatum. Science (New York, N.Y.), 310, 1337–40. 43, 104, 119
S AMSON , R.D., F RANK , M.J. & F ELLOUS , J.M. (2010). Computational models of reinforcement learning: the role of dopamine as a reward signal. Cognitive neurodynamics, 4, 91–105. 79
S ANDBERG , A. (2003). Bayesian Attractor Neural Network Models of Memory. Ph.D. thesis, Stockholms
universitet. 88
S ANDBERG , A., L ANSNER , A., P ETERSSON , K.M., E KEBERG , O. & E KEBERG , G. (2000). A palimpsest
memory based on an incremental Bayesian learning rule. Neurocomputing, 32-33, 987–994. 87, 108
S ARVESTANI , I.K., L INDAHL , M., H ELLGREN -KOTALESKI , J. & E KEBERG , O. (2011). The arbitrationextension hypothesis: a hierarchical interpretation of the functional organization of the Basal Ganglia.
Frontiers in systems neuroscience, 5, 13. 55
S ATO , F., L AVALLÉE , P., L ÉVESQUE , M. & PARENT, A. (2000). Single-axon tracing study of neurons of
the external segment of the globus pallidus in primate. Journal of Comparative Neurology, 417, 17–31.
54
S CHARFF , C. & N OTTEBOHM , F. (1991). Study of the behavioral deficits following lesions of various
parts of the zebra finch song system: Implications for vocal learning. Journal of Neuroscience, 11,
2896–2913. 66
S CHEMMEL , J., F IERES , J. & M EIER , K. (2008). Wafer-scale integration of analog neural networks. In
Proceedings of the International Joint Conference on Neural Networks, 431–438. 76
S CHEMMEL , J., B RÜDERLE , D., G RÜBL , A., H OCK , M., M EIER , K. & M ILLNER , S. (2010). A waferscale neuromorphic hardware system for large-scale neural modeling. In ISCAS 2010 - 2010 IEEE International Symposium on Circuits and Systems: Nano-Bio Circuit Fabrics and Systems, 1947–1950.
76
S CHMACK , K., G ÒMEZ -C ARRILLO DE C ASTRO , A., ROTHKIRCH , M., S EKUTOWICZ , M., R ÖSSLER ,
H., H AYNES , J. D ., H EINZ , A., P ETROVIC , P., S TERZER , P., G O , A., C ASTRO , D., ROTHKIRCH ,
M., S EKUTOWICZ , M., RO , H., H AYNES , J. D ., H EINZ , A., P ETROVIC , P. & S TERZER , P. (2013).
Delusions and the role of beliefs in perceptual inference. The Journal of neuroscience : the official
journal of the Society for Neuroscience, 33, 13701–12. 71
S CHMAJUK , N.A., L AM , Y.W. & G RAY, J.A. (1996). Latent inhibition: A neural network approach. 24
S CHROLL , H. & H AMKER , F.H. (2013). Computational models of basal-ganglia pathway functions: focus
on functional neuroanatomy. Frontiers in systems neuroscience, 7, 122. 55, 79
S CHROLL , H., V ITAY, J. & H AMKER , F.H. (2014). Dysfunctional and compensatory synaptic plasticity
in Parkinson’s disease. European Journal of Neuroscience, 39, 688–702. 69, 79
S CHULTZ , W. (2007a). Behavioral dopamine signals. Trends in neurosciences, 30, 203–10. 60, 63, 82
S CHULTZ , W. (2007b). Multiple Dopamine Functions at Different Time Courses. Annual Review of Neuroscience. 63
S CHULTZ , W., A PICELLA , P., S CARNATI , E. & L JUNGBERG , T. (1992). Neuronal activity in monkey
ventral striatum related to the expectation of reward. The Journal of neuroscience : the official journal
of the Society for Neuroscience, 12, 4595–4610. 48
S CHULTZ , W., A PICELLA , P. & L JUNGBERG , T. (1993). Responses of monkey dopamine neurons to
reward and conditioned stimuli during successive steps of learning a delayed response task. The Journal
of neuroscience : the official journal of the Society for Neuroscience, 13, 900–913. 60
S CHULTZ , W., DAYAN , P. & M ONTAGUE , P.R. (1997). A neural substrate of prediction and reward.
Science (New York, N.Y.), 275, 1593–9. 60, 62, 63, 81
S CHULTZ , W., T REMBLAY, L. & H OLLERMAN , J.R. (1998). Reward prediction in primate basal ganglia
and frontal cortex. Neuropharmacology, 37, 421–429. 60
S CHULTZ , W., T REMBLAY, L. & H OLLERMAN , J.R. (2000). Reward processing in primate orbitofrontal
cortex and basal ganglia. Cerebral cortex (New York, N.Y. : 1991), 10, 272–84. 63
S EAGER , M.A., S MITH -B ELL , C.A. & S CHREURS , B.G. (2003). Conditioning-specific reflex modification of the rabbit (Oryctolagus cuniculus) nictitating membrane response: US intensity effects. Learning
& behavior : a Psychonomic Society publication, 31, 292–298. 24
S EGER , C.A. & S PIERING , B.J. (2011). A critical review of habit learning and the Basal Ganglia. Frontiers
in systems neuroscience, 5, 66. 65
S ELKOE , D.J. (2002). Alzheimer’s disease is a synaptic failure. Science (New York, N.Y.), 298, 789–791.
40
S ESACK , S.R. & G RACE , A.A. (2010). Cortico-Basal Ganglia Reward Network: Microcircuitry. Neuropsychopharmacology, 35, 27–47. 52, 57
S ESIA , T., B IZUP, B. & G RACE , A. (2013). Nucleus accumbens high-frequency stimulation selectively
impacts nigrostriatal dopaminergic neurons. The international journal of . . . , 17, 1–7. 65
S HAN , Q., G E , M., C HRISTIE , M.J. & BALLEINE , B.W. (2014). The Acquisition of Goal-Directed Actions Generates Opposing Plasticity in Direct and Indirect Pathways in Dorsomedial Striatum. Journal
of Neuroscience, 34, 9196–9201. 63
S HEN , W., F LAJOLET, M., G REENGARD , P. & S URMEIER , D.J. (2008). Dichotomous Dopaminergic
Control of Striatal Synaptic Plasticity. Science, 321, 848–851. 41, 42, 43, 60, 61, 62, 63, 69
S HETH , S. A ., A BUELEM , T., G ALE , J.T. & E SKANDAR , E.N. (2011). Basal ganglia neurons dynamically
facilitate exploration during associative learning. The Journal of neuroscience : the official journal of
the Society for Neuroscience, 31, 4878–85. 109
S HOUVAL , H.Z., B EAR , M.F. & C OOPER , L.N. (2002). A unified model of NMDA receptor-dependent
bidirectional synaptic plasticity. Proceedings of the National Academy of Sciences, 99, 10831–10836.
79
S HU , Y., H ASENSTAUB , A. & M C C ORMICK , D.A. (2003). Turning on and off recurrent balanced cortical
activity. Nature, 423, 288–293. 38
S ILBERBERG , G. & B OLAM , J.P. (2015). Local and afferent synaptic pathways in the striatal microcircuitry. Current Opinion in Neurobiology, 33, 182–187. 51
S ILVERSTEIN , D.N. & L ANSNER , A. (2011). Is attentional blink a byproduct of neocortical attractors?
Frontiers in computational neuroscience, 5, 13. 87
S ILVERSTEIN , S.M., WANG , Y. & K EANE , B.P. (2013). Cognitive and neuroplasticity mechanisms by
which congenital or early blindness may confer a protective effect against schizophrenia. Frontiers in
Psychology, 3, 1–15. 70
S IMEN , P., BALCI , F., D E S OUZA , L., C OHEN , J.D. & H OLMES , P. (2011). A Model of Interval Timing
by Neural Integration. Journal of Neuroscience, 31, 9238–9253. 55
S IPPY, T., L APRAY, D., C ROCHET, S. & P ETERSEN , C.C. (2015). Cell-Type-Specific Sensorimotor Processing in Striatal Projection Neurons during Goal-Directed Behavior. Neuron, 1–8. 46, 53, 130
S JÖSTRÖM , P.J., T URRIGIANO , G.G. & N ELSON , S.B. (2001). Rate, timing, and cooperativity jointly
determine cortical synaptic plasticity. Neuron, 32, 1149–1164. 42, 78
S KINNER , B. (1938). The Behavior of Organisms: An experimental analysis. 23
S MITH , K.S. & G RAYBIEL , A.M. (2014). Investigating habits: strategies, technologies and models. Frontiers in Behavioral Neuroscience, 8, 1–17. 67
S MITH , Y., S URMEIER , D.J., R EDGRAVE , P. & K IMURA , M. (2011). Thalamic Contributions to Basal
Ganglia-Related Behavioral Switching and Reinforcement. The Journal of neuroscience : the official
journal of the Society for Neuroscience, 31, 16102–6. 44
S OLTOGGIO , A. & S TANLEY, K.O. (2012). From modulated Hebbian plasticity to simple behavior learning
through noise and weight saturation. Neural networks : the official journal of the International Neural
Network Society, 34, 28–41. 35
S ONG , S., M ILLER , K.D. & A BBOTT, L.F. (2000). Competitive Hebbian learning through spike-timingdependent synaptic plasticity. Nature neuroscience, 3, 919–26. 42, 78
S ONG , S., S JÖSTRÖM , P.J., R EIGL , M., N ELSON , S. & C HKLOVSKII , D.B. (2005). Highly nonrandom
features of synaptic connectivity in local cortical circuits. PLoS Biology, 3, 0507–0519. 38
S QUIRE , L.R. (1987). Memory and brain.. 20
S QUIRE , L.R. (2009). The Legacy of Patient H.M. for Neuroscience. Neuron, 61, 6–9. 37
S TAMATAKIS , A.M. & S TUBER , G.D. (2012). Activation of lateral habenula inputs to the ventral midbrain
promotes behavioral avoidance. Nature Neuroscience, 15, 1105–1107. 58
S TANKEVICIUS , A., H UYS , Q.J.M., K ALRA , A. & S ERIÈS , P. (2014). Optimism as a Prior Belief about
the Probability of Future Reward. PLoS Computational Biology, 10. 115
S TEINBERG , E.E., K EIFLIN , R., B OIVIN , J.R., W ITTEN , I.B., D EISSEROTH , K. & JANAK , P.H. (2013).
A causal link between prediction errors, dopamine neurons and learning. Nature Neuroscience, 16, 966–
973. 59
S TEINER , A.P. & R EDISH , A .D. (2014). Behavioral and neurophysiological correlates of regret in rat
decision-making on a neuroeconomic task. Nature Neuroscience, 17, 995–1002. 119
S TEPHENSON -J ONES , M., S AMUELSSON , E., E RICSSON , J., ROBERTSON , B. & G RILLNER , S. (2011).
Evolutionary Conservation of the Basal Ganglia as a Common Vertebrate Mechanism for Action Selection. Current Biology, 21, 1081–1091. 43
S TEPHENSON -J ONES , M., K ARDAMAKIS , A.A., ROBERTSON , B. & G RILLNER , S. (2013). Independent
circuits in the basal ganglia for the evaluation and selection of actions. Proceedings of the National
Academy of Sciences, 110, E3670–E3679. 50, 58, 59, 116
S TEWART, T.C., B EKOLAY, T. & E LIASMITH , C. (2012). Learning to select actions with spiking neurons
in the Basal Ganglia. Frontiers in neuroscience, 6, 2. 79, 80, 82
S TOPPER , C., T SE , M., M ONTES , D., W IEDMAN , C. & F LORESCO , S. (2014). Overriding Phasic
Dopamine Signals Redirects Action Selection during Risk/Reward Decision Making. Neuron, 84, 177–
189. 60
S TUBER , G.D., H NASKO , T.S., B RITT, J.P., E DWARDS , R.H. & B ONCI , A. (2010). Dopaminergic Terminals in the Nucleus Accumbens But Not the Dorsal Striatum Corelease Glutamate. Journal of Neuroscience, 30, 8229–8233. 48, 57
S URI , R.E. (2002). TD models of reward predictive responses in dopamine neurons. Neural Networks, 15,
523–533. 60, 81
S URI , R.E. & S CHULTZ , W. (1998). Learning of sequential movements by neural network model with
dopamine-like reinforcement signal. Experimental Brain Research, 121, 350–354. 82
S URI , R.E., BARGAS , J. & A RBIB , M. A . (2001). Modeling functions of striatal dopamine modulation in
learning and planning. Neuroscience, 103, 65–85. 60, 81
S URI , R.R. & S CHULTZ , W. (2001). Temporal difference model reproduces anticipatory neural activity.
Neural Computation, 862, 841–862. 81
S URMEIER , D.J., E BERWINE , J., W ILSON , C.J., C AO , Y., S TEFANI , A . & K ITAI , S.T. (1992). Dopamine
receptor subtypes colocalize in rat striatonigral neurons. Proceedings of the National Academy of Sciences of the United States of America, 89, 10178–82. 46
S URMEIER , D.J., YAN , Z. & S ONG , W.J. (1997). Coordinated Expression of Dopamine Receptors in
Neostriatal Medium Spiny Neurons. Advances in Pharmacology, 42, 1020–1023. 44, 46
S URMEIER , D.J., D ING , J., DAY, M., WANG , Z. & S HEN , W. (2007). D1 and D2 dopamine-receptor
modulation of striatal glutamatergic signaling in striatal medium spiny neurons. Trends in neurosciences,
30, 228–35. 42, 60, 62, 63
S UTTON , R. & BARTO , A.G. (1998). Reinforcement learning. MIT Press. 29, 30
S UTTON , R.S. (1988). Learning to predict by the methods of temporal differences. Machine Learning, 3,
9–44. 28
S YED , E.C.J., G RIMA , L.L., M AGILL , P.J., B OGACZ , R., B ROWN , P. & WALTON , M.E. (2015). Action
initiation shapes mesolimbic dopamine encoding of future rewards. Nature Neuroscience, 1–6. 113
S ZCZYPKA , M.S., K WOK , K., B ROT, M.D., M ARCK , B.T., M ATSUMOTO , A.M., D ONAHUE , B. A . &
PALMITER , R.D. (2001). Dopamine production in the caudate putamen restores feeding in dopaminedeficient mice. Neuron, 30, 819–828. 61
S ZYDLOWSKI , S.N., P OLLAK D OROCIC , I., P LANERT, H., C ARLÉN , M., M ELETIS , K. & S ILBERBERG ,
G. (2013). Target selectivity of feedforward inhibition by striatal fast-spiking interneurons. The Journal
of neuroscience : the official journal of the Society for Neuroscience, 33, 1678–83. 46, 51
TAI , L.H., L EE , A.M., B ENAVIDEZ , N., B ONCI , A. & W ILBRECHT, L. (2012). Transient stimulation
of distinct subpopulations of striatal neurons mimics changes in action value. Nature Neuroscience, 15,
1281–1289. 46, 53, 104, 111, 130
TAN , K., Y VON , C., T URIAULT, M., M IRZABEKOV, J., D OEHNER , J., L ABOUÈBE , G., D EISSEROTH ,
K., T YE , K. & L ÜSCHER , C. (2012). GABA Neurons of the VTA Drive Conditioned Place Aversion.
Neuron, 73, 1173–1183. 58
TAVERNA , S., VAN D ONGEN , Y.C., G ROENEWEGEN , H.J. & P ENNARTZ , C.M. A . (2004). Direct physiological evidence for synaptic connectivity between medium-sized spiny neurons in rat nucleus accumbens in situ. Journal of neurophysiology, 91, 1111–21. 46, 51, 119
TAVERNA , S., I LIJIC , E. & S URMEIER , D.J. (2008). Recurrent collateral connections of striatal medium
spiny neurons are disrupted in models of Parkinson’s disease. The Journal of neuroscience : the official
journal of the Society for Neuroscience, 28, 5504–12. 46, 51, 68, 119
T ECUAPETLA , F., C ARRILLO -R EID , L., BARGAS , J. & G ALARRAGA , E. (2007). Dopaminergic modulation of short-term synaptic plasticity at striatal inhibitory synapses. Proceedings of the National
Academy of Sciences of the United States of America, 104, 10258–10263. 41
T ECUAPETLA , F., PATEL , J.C., X ENIAS , H., E NGLISH , D., TADROS , I., S HAH , F., B ERLIN , J., D EIS SEROTH , K., R ICE , M.E., T EPPER , J.M. & KOOS , T. (2010). Glutamatergic signaling by mesolimbic
dopamine neurons in the nucleus accumbens. The Journal of neuroscience : the official journal of the
Society for Neuroscience, 30, 7105–10. 48, 57
T ECUAPETLA , F., M ATIAS , S., D UGUE , G.P., M AINEN , Z.F. & C OSTA , R.M. (2014). Balanced activity
in basal ganglia projection pathways is critical for contraversive movements. Nature communications,
5, 4315. 109
T EMEL , Y., B LOKLAND , A., S TEINBUSCH , H.W.M. & V ISSER -VANDEWALLE , V. (2005). The functional role of the subthalamic nucleus in cognitive and limbic circuits. Progress in Neurobiology, 76,
393–413. 54
T EPPER , J.M. & B OLAM , J.P. (2004). Functional diversity and specificity of neostriatal interneurons.
Current Opinion in Neurobiology, 14, 685–692. 51
T EPPER , J.M. & L EE , C.R. (2007). GABAergic control of substantia nigra dopaminergic neurons.
Progress in Brain Research, 160, 189–208. 57
T EPPER , J.M., W ILSON , C.J. & KOÓS , T. (2008). Feedforward and feedback inhibition in neostriatal
GABAergic spiny neurons. Brain Research Reviews, 58, 272–281. 51
T EPPER , J.M., T ECUAPETLA , F., KOÓS , T. & I BÁÑEZ -S ANDOVAL , O. (2010). Heterogeneity and diversity of striatal GABAergic interneurons. Frontiers in neuroanatomy, 4, 150. 51
T ETZLAFF , C., KOLODZIEJSKI , C., M ARKELIC , I. & W ÖRGÖTTER , F. (2012). Time scales of memory,
learning, and plasticity. Biological Cybernetics, 106, 1–12. 40
T HOMAS , M.J., M ALENKA , R.C. & B ONCI , A. (2000). Modulation of long-term depression by dopamine
in the mesolimbic system. The Journal of neuroscience : the official journal of the Society for Neuroscience, 20, 5581–5586. 59
T HORN , C. A ., ATALLAH , H., H OWE , M. & G RAYBIEL , A.M. (2010). Differential dynamics of activity
changes in dorsolateral and dorsomedial striatal loops during learning. Neuron, 66, 781–95. 49
T HORNDIKE , E.L. (1998). Animal intelligence: An experimental study of the associate processes in animals (originally published 1898). American Psychologist, 53, 1125–1127. 23
T HRELFELL , S. & C RAGG , S.J. (2011). Dopamine signaling in dorsal versus ventral striatum: the dynamic
role of cholinergic interneurons. Frontiers in systems neuroscience, 5, 11. 56
T HRELFELL , S., L ALIC , T., P LATT, N., J ENNINGS , K., D EISSEROTH , K. & C RAGG , S. (2012). Striatal
Dopamine Release Is Triggered by Synchronized Activity in Cholinergic Interneurons. Neuron, 75, 58–
64. 52, 62
T OBLER , P.N., F IORILLO , C.D. & S CHULTZ , W. (2005). Adaptive coding of reward value by dopamine
neurons. Science (New York, N.Y.), 307, 1642–5. 63
T RÉPANIER , L.L., K UMAR , R., L OZANO , A .M., L ANG , A .E. & S AINT-C YR , J. A . (2000). Neuropsychological outcome of GPi pallidotomy and GPi or STN deep brain stimulation in Parkinson’s disease.
Brain and cognition, 42, 324–347. 69
T RITSCH , N.X. & S ABATINI , B.L. (2012). Dopaminergic modulation of synaptic transmission in cortex
and striatum. Neuron, 76, 33–50. 41
T RITSCH , N.X., D ING , J.B. & S ABATINI , B.L. (2012). Dopaminergic neurons inhibit striatal output
through non-canonical release of GABA. Nature, 490, 262–6. 48, 57
T SAI , H.C., Z HANG , F., A DAMANTIDIS , A., S TUBER , G.D., B ONCI , A., DE L ECEA , L. & D EIS SEROTH , K. (2009). Phasic firing in dopaminergic neurons is sufficient for behavioral conditioning.
Science (New York, N.Y.), 324, 1080–1084. 61, 114
T SUBOI , D., K URODA , K., TANAKA , M., NAMBA , T., I IZUKA , Y., TAYA , S., S HINODA , T., H IKITA , T.,
M URAOKA , S., I IZUKA , M., N IMURA , A., M IZOGUCHI , A., S HIINA , N., S OKABE , M., O KANO , H.,
M IKOSHIBA , K. & K AIBUCHI , K. (2015). Disrupted-in-schizophrenia 1 regulates transport of ITPR1
mRNA for synaptic plasticity. Nature Neuroscience. 71
T ULLY, P.J., H ENNIG , M.H. & L ANSNER , A. (2014). Synaptic and nonsynaptic plasticity approximating
probabilistic inference. Frontiers in Synaptic Neuroscience. 88, 90, 106, 108
T URRIGIANO , G.G. (1999). Homeostatic plasticity in neuronal networks: The more things change, the
more they stay the same. Trends in Neurosciences, 22, 221–227. 42
U CHIDA , N. (2014). Bilingual neurons release glutamate and GABA. Nature Neuroscience, 17, 1432–1434.
34, 93
U EKI , A. (1983). The mode of nigro-thalamic transmission investigated with intracellular recording in the
cat. Experimental Brain Research, 49, 116–124. 53
U NGLESS , M.A., W HISTLER , J.L., M ALENKA , R.C. & B ONCI , A. (2001). Single cocain exposure in
vivo induces long-term potentiation in dopamine neurons. Nature, 411, 583–587. 59, 64
U NGLESS , M.A., M AGILL , P.J. & B OLAM , J.P. (2004). Uniform Inhibition of Dopamine Neurons in the
Ventral Tegmental Area by Aversive Stimuli. Science, 303, 2040–2042. 64
M EER , M.A. & R EDISH , A.D. (2011). Ventral striatum: a critical look at models of learning
and evaluation. Current Opinion in Neurobiology, 21, 387–392. 48
VAN DER
Z ESSEN , R., P HILLIPS , J.L., B UDYGIN , E. A . & S TUBER , G.D. (2012). Activation of VTA GABA
Neurons Disrupts Reward Consumption. Neuron, 73, 1184–1194. 58
VAN
VAN RULLEN , R., G UYONNEAU , R. & T HORPE , S.J. (2005). Spike times make sense. Trends in Neurosciences, 28, 1–4. 36
VOGGINGER , B., S CHÜFFNY, R., L ANSNER , A., C EDERSTRÖM , L., PARTZSCH , J. & H ÖPPNER , S.
(2015). Reducing the computational footprint for real-time BCPNN learning. Frontiers in Neuroscience:
Neuromorphic Engineering, 9, 1–16. 77
VOORN , P., VANDERSCHUREN , L.J., G ROENEWEGEN , H.J., ROBBINS , T.W. & P ENNARTZ , C.M.
(2004). Putting a spin on the dorsal–ventral divide of the striatum. Trends in Neurosciences, 27, 468–
474. 48
WALDSCHMIDT, J.G. & A SHBY, F.G. (2011). Cortical and striatal contributions to automaticity in
information-integration categorization. NeuroImage, 56, 1791–1802. 120
WALKER , F.O. & WALKER , F.O. (2007). Huntington’s disease. Lancet, 369, 218–228. 70
WALKER , S.F. (1992). A Brief History of Connectionism and its Psycholohical Implications. In A. Clark
& R. Lutz, eds., Connectionism in Context, 123–144, Springer-Verlag, Berlin. 19
WALL , N., D E L A PARRA , M., C ALLAWAY, E. & K REITZER , A. (2013). Differential innervation of directand indirect-pathway striatal projection neurons. Neuron, 79, 347–360. 44, 47
WARMAN , D.M. (2008). Reasoning and delusion proneness: confidence in decisions. The Journal of nervous and mental disease, 196, 9–15. 71
WATABE -U CHIDA , M., Z HU , L., O GAWA , S.K., VAMANRAO , A. & U CHIDA , N. (2012). Whole-brain
mapping of direct inputs to midbrain dopamine neurons. Neuron, 74, 858–73. 50, 56, 57
WATSON , J.B. (1913). Psychology as the behaviorist views it. 23
WATT, A.J. & D ESAI , N.S. (2010). Homeostatic Plasticity and STDP: Keeping a Neuron’s Cool in a
Fluctuating World. Frontiers in synaptic neuroscience, 2, 5. 42, 114
W EST, A.R. & G RACE , A. A . (2002). Opposite influences of endogenous dopamine D1 and D2 receptor
activation on activity states and electrophysiological properties of striatal neurons: studies combining in
vivo intracellular recordings and reverse microdialysis. The Journal of neuroscience : the official journal
of the Society for Neuroscience, 22, 294–304. 63
W ICKENS , J.R., R EYNOLDS , J.N.J. & H YLAND , B.I. (2003). Neural mechanisms of reward-related motor learning. Current Opinion in Neurobiology, 13, 685–690. 60
W IECKI , T.V. & F RANK , M.J. (2010). Neurocomputational models of motor and cognitive deficits in
Parkinson’s disease, vol. 183. Elsevier B.V. 81
W IESENDANGER , E., C LARKE , S., K RAFTSIK , R. & TARDIF, E. (2004). Topography of cortico-striatal
connections in man: Anatomical evidence for parallel organization. European Journal of Neuroscience,
20, 1915–1922. 47
W ILSON , C.J., C HANG , H.T. & K ITAI , S.T. (1990). Firing patterns and synaptic potentials of identified
giant aspiny interneurons in the rat neostriatum. The Journal of neuroscience : the official journal of the
Society for Neuroscience, 10, 508–519. 51
W OERGOETTER , F. & P ORR , B. (2008). Reinforcement Learning. Scholarpedia, 3, 1448. 26
W OLPERT, D.M., G HAHRAMANI , Z. & J ORDAN , M.I. (1995). An internal model for sensorimotor integration. Science, 269, 1880–1882. 17, 83
W OLPERT, D.M., D IEDRICHSEN , J. & F LANAGAN , J.R. (2011). Principles of sensorimotor learning.
Nature Reviews Neuroscience, 12, 1–13. 126
W OODBERRY, K.A., G IULIANO , A.J. & S EIDMAN , L.J. (2008). Premorbid IQ in schizophrenia: A metaanalytic review. American Journal of Psychiatry, 165, 579–587. 70
W ÖRGÖTTER , F. & P ORR , B. (2005). Temporal sequence learning, prediction, and control: a review of
different models and their relation to biological mechanisms. Neural computation, 17, 245–319. 55, 60,
78, 79
W OTRUBA , D., H EEKEREN , K., M ICHELS , L., B UECHLER , R., S IMON , J.J., T HEODORIDOU , A., KOL LIAS , S., Rö SSLER , W. & K AISER , S. (2014). Symptom dimensions are associated with reward
processing in unmedicated persons at risk for psychosis. Frontiers in Behavioral Neuroscience, 8, 1–9.
72
X IA , Y., D RISCOLL , J.R., W ILBRECHT, L., M ARGOLIS , E.B., F IELDS , H.L. & H JELMSTAD , G.O.
(2011). Nucleus accumbens medium spiny neurons target non-dopaminergic neurons in the ventral
tegmental area. The Journal of neuroscience : the official journal of the Society for Neuroscience, 31,
7811–6. 48, 116
YAGISHITA , S., H AYASHI -TAKAGI , A., E LLIS -DAVIES , G.C.R., U RAKUBO , H., I SHII , S. & K ASAI ,
H. (2014). A critical time window for dopamine actions on the structural plasticity of dendritic spines.
Science. 60, 61, 127
YAMADA , H., M ATSUMOTO , N. & K IMURA , M. (2004). Tonically active neurons in the primate caudate
nucleus and putamen differentially encode instructed motivational outcomes of action. The Journal of
neuroscience : the official journal of the Society for Neuroscience, 24, 3500–10. 51, 59
YANG , T. & S HADLEN , M.N. (2007). Probabilistic reasoning by neurons. Nature, 447, 1075–80. 83
Y ELNIK , J. (2002). Functional anatomy of the basal ganglia. Movement Disorders, 17, S15–S21. 53
Y IN , H.H. & K NOWLTON , B.J. (2006). The role of the basal ganglia in habit formation. Nature reviews.
Neuroscience, 7, 464–76. 65
Y IN , H.H., K NOWLTON , B.J. & BALLEINE , B.W. (2004). Lesions of dorsolateral striatum preserve
outcome expectancy but disrupt habit formation in instrumental learning. European Journal of Neuroscience, 19, 181–189. 65
YOSHIMURA , Y., DANTZKER , J.L.M. & C ALLAWAY, E.M. (2005). Excitatory cortical neurons form
fine-scale functional networks. Nature, 433, 868–873. 38
Y USTE , R. (2015). From the neuron doctrine to neural networks. Nature Reviews Neuroscience, 16, 487–
497. 35
Z ENKE , F., H ENNEQUIN , G. & G ERSTNER , W. (2013). Synaptic Plasticity in Neural Networks Needs
Homeostasis with a Fast Rate Detector. PLoS Computational Biology, 9. 42