Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Holonomic brain theory wikipedia , lookup
Eyeblink conditioning wikipedia , lookup
Synaptogenesis wikipedia , lookup
Neuroethology wikipedia , lookup
Catastrophic interference wikipedia , lookup
Artificial general intelligence wikipedia , lookup
Bird vocalization wikipedia , lookup
Multielectrode array wikipedia , lookup
Neuroeconomics wikipedia , lookup
Neural modeling fields wikipedia , lookup
Embodied language processing wikipedia , lookup
Clinical neurochemistry wikipedia , lookup
Convolutional neural network wikipedia , lookup
Molecular neuroscience wikipedia , lookup
Activity-dependent plasticity wikipedia , lookup
Single-unit recording wikipedia , lookup
Circumventricular organs wikipedia , lookup
Recurrent neural network wikipedia , lookup
Neuroanatomy wikipedia , lookup
Caridoid escape reaction wikipedia , lookup
Development of the nervous system wikipedia , lookup
Neurotransmitter wikipedia , lookup
Neural oscillation wikipedia , lookup
Stimulus (physiology) wikipedia , lookup
Metastability in the brain wikipedia , lookup
Central pattern generator wikipedia , lookup
Neural coding wikipedia , lookup
Nonsynaptic plasticity wikipedia , lookup
Types of artificial neural networks wikipedia , lookup
Biological neuron model wikipedia , lookup
Donald O. Hebb wikipedia , lookup
Optogenetics wikipedia , lookup
Premovement neuronal activity wikipedia , lookup
Feature detection (nervous system) wikipedia , lookup
Chemical synapse wikipedia , lookup
Pre-Bötzinger complex wikipedia , lookup
Neuropsychopharmacology wikipedia , lookup
Channelrhodopsin wikipedia , lookup
Mirror neuron wikipedia , lookup
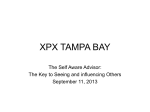
A computational account for the ontogeny of mirror neurons via Hebbian learning Graduation Project Bachelor Artificial Intelligence Credits: 18 EC Author Lotte Weerts 10423303 University of Amsterdam Faculty of Science Science Park 904 1098 XH Amsterdam Supervisors dr. Sander Bohté Centrum Wiskunde & Informatica Life Sciences Group Science Park 123 1098 XG Amsterdam dr. Rajat Mani Thomas Netherlands Institute for Neuroscience Social Brain Lab Meibergdreef 47 1105 BA Amsterdam prof. dr. Max Welling University of Amsterdam Faculty of Science Science Park 904 1098 XH Amsterdam June 26, 2015 Abstract It has been proposed that Hebbian learning could be responsible for the ontogeny of predictive mirror neurons (Keysers and Gazzola, 2014). Predictive mirror neurons fire both when an individual performs a certain action and when the action they encode is most likely to follow a concurrently observed action. Here, we show that a variation of Oja’s rule (an implementation of Hebbian learning) is sufficient for the emergence of mirror neurons. An artificial neural network has been created that simulates the interactions between the premotor cortex (PM) and the superior temporal sulcus (STS). The PM cortex coordinates self-performed actions, whereas the STS is a region known to respond to the sight of body movements and the sound of actions. A quantitative method for analyzing (predictive) mirror neuron activity in the artificial neural network is presented. A parameter space analysis shows that a variation of Oja’s rule that uses a threshold produces mirror neuron behavior, given that the bounds for the weights of inhibitory synapses are lower than those of excitatory synapses. By extension, this work provides positive evidence for the association hypothesis, which states that mirror-like behavior of neurons in the motorcortex arises due to associations established between sensory- and motor stimuli. Acknowledgements My sincere thanks goes to Sander Bohté, for sharing his expertise and for providing me with excellent guidance and encouragement throughout the course of this project. Furthermore, I am extremely grateful to Rajat Thomas, for the illuminating insight and expertise he has shared with me with great enthusiasm. I would also like to thank Max Welling, who took the effort to be my university supervisor regardless of his busy schedule. Finally, I want to thank my parents and sisters for their continuous source of support and motivation. Contents 1 Introduction 2 Theoretical foundation 2.1 Interpretations of associative learning . 2.1.1 Hebbian learning . . . . . . . . 2.1.2 Rescorla Wagner . . . . . . . . 2.2 Hebbian learning rules . . . . . . . . . 2.2.1 Basic Hebb Rule . . . . . . . . 2.2.2 Covariance rule . . . . . . . . . 2.2.3 BCM . . . . . . . . . . . . . . . 2.2.4 Oja’s rule . . . . . . . . . . . . 2.3 Summary . . . . . . . . . . . . . . . . 1 . . . . . . . . . 3 3 3 4 4 5 5 6 6 7 . . . . . 8 8 9 10 11 12 4 Analysis procedure 4.1 A visualization of mirror neuron behavior . . . . . . . . . . . . . . . . . . 4.2 Analysis procedure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.3 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13 13 13 16 . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 Computational model 3.1 A motivation for the structure of the model 3.2 Modeling a single neuron . . . . . . . . . . . 3.3 Modeling action execution and observation . 3.4 Learning rules . . . . . . . . . . . . . . . . . 3.5 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 Results 17 5.1 Comparison of learning rules . . . . . . . . . . . . . . . . . . . . . . . . . . 17 5.2 Parameter space analysis of Oja’s rule . . . . . . . . . . . . . . . . . . . . 20 5.3 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21 6 Conclusion 22 7 Discussion and future work 23 7.1 Limitations of this study . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23 7.2 Future work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23 1 Introduction In the early 1990s, mirror neurons were discovered in the ventral premotor cortex of the macaque monkey (Di Pellegrino et al., 1992). These neurons fired both when the monkeys grabbed an object and when they watched another primate grab that same object. Mirror neuron-like activity has been observed in monkeys, birds and humans (Catmur, 2013). More recently, evidence has started to emerge that suggests the existence of mirror neurons with predictive properties (Keysers and Gazzola, 2014). These neurons fire when the action they encode is the action most likely to happen next, rather than the action that is concurrently being observed. A critical question concerns how (predictive) mirror neurons have developed to behave the way they do. In other words: what is the ontogeny of mirror neurons? Two distinct views have emerged with regards to the origin of mirror neurons: the adaptation hypothesis and the association hypothesis (Heyes, 2010). The adaptation hypothesis refers to the idea that mirror neurons are an adaptation for action understanding and thus a result of evolution. According to this hypothesis, humans are born with mirror neurons and experience plays a relatively minor role in their development. Alternatively, one can view mirror neurons as a product of associative learning, which suggests that these neurons emerge through a correlated experience of observing and executing the same action. The mechanism responsible for associative learning itself is a product of evolution, but associative learning did not evolve for the ’purpose’ of producing mirror neurons. The important difference between these two theories is the role of sensorimotor experience, which is crucial for the associative hypothesis but has a less prevalent role in the adaptation hypothesis. In this work, the focus will lie on further developing the association hypothesis. While both the association- and adaptation hypotheses can account for the ontogeny of mirror neurons, the association hypothesis has several advantages. First, it is consistent with evidence that indicates that mirror neurons contribute to a range of social cognitive functions that do not play a role in action understanding, such as emotions (Heyes, 2010). Second, research suggests that the perceptual motor system is optimized to provide the brain with input for associative learning (Giudice et al., 2009). For example, infants have a marked visual preference for hands. Such a preference could provide a rich set of input stimuli for mirror neurons that are active in manual actions. Keysers and Gazzola (2014) have proposed a mechanistic perspective on how mirror neurons in the premotor cortex could emerge due to associative learning, or more precisely, Hebbian learning. Hebbian learning was first proposed by Donald Hebb in 1949 as an explanation for synaptic plasticity, which refers to the ability of the connections (or synapses) between neurons to become either weaker or stronger (Cooper et al., 2013b). Thus, Hebbian learning explains learning on a local level between single neurons. Hebb postulated the principle as follows: "when an axon of cell A is near enough to excite a cell B and repeatedly or persistently takes part in firing it, some growth process or metabolic change takes place in one or both cells such that A’s efficiency, as one of the cells firing B, is increased". 1 To investigate whether or not Hebbian learning is sufficient to lead to the emergence of mirror neurons, we present a computational approach that implements the mechanics described by Keysers and Gazzola (2014). This involves the usage of an artificial neural network (ANN) to simulate activity in the premotor cortex (PM) and the superior temporal sulcus (STS). The PM cortex coordinates self-performed actions, whereas the STS is a region known to respond to the sight of body movements and the sound of actions. Action execution and observation will be simulated by exciting neurons in these two areas. The aim of this simulation is to find out whether or not associative learning - in particular Hebbian learning - is sufficient to lead to the development of mirror neurons. Specifically, the problem investigated in this work can be defined as follows: Can artificial neural networks that evolve via a local Hebbian-like learning rule, when exposed to action execution and observation, be sufficient to lead to the emergence of predictive mirror neurons? Here, we show that Oja’s rule, an implementation of Hebbian learning, is sufficient to impose predictive mirror-like behavior. First, the proposed research question is considered in relation to other studies on the ontogeny of mirror neurons (chapter 2). This includes a review of four implementations of Hebbian learning: basic Hebb, the covariance learning rule, BCM, and Oja’s rule. Subsequently, the computational model that describes the artificial neural network is introduced in chapter 3. Additionally, a variation of Oja’s rule is presented. The procedure for the quantitative analysis of mirror neuron-like behavior, as explained in chapter 4, has been applied to the recorded activity of ANNs that evolve via several different learning rules. The results of this analysis are described in chapter 5. Finally, it is argued in chapter 6 that an artificial neural network that evolves via a variation of Oja’s rule is sufficient to explain the emergence of mirror neurons. Related problems that should be considered in future work are dealt with in chapter 7, the final chapter. 2 2 Theoretical foundation In this chapter, research that has preceded the current work will be discussed. First, two computational accounts for the ontogony of mirror neurons via the association hypothesis will be discussed. Subsequently, an elaboration of several implementations of Hebbian learning that have been proposed in the literature will be given. 2.1 Interpretations of associative learning The association hypothesis states that mirror neurons emerge due to associative learning. This term refers to any learning process in which a new response becomes associated with a particular stimulus (Terry, 2006). As a refinement of the association hypothesis, two different implementations of associative learning have been proposed, namely Hebbian learning (Keysers and Gazzola, 2014) and Rescorla-Wagner (Cooper et al., 2013b). 2.1.1 Hebbian learning Keysers and Gazzola (2014) have proposed a model in which Hebbian learning could account for the emergence of mirror neurons. Whereas there are several brain regions that contain mirror neurons, they illustrate their idea with connections between the premotor cortex (PM), the inferior posterior parietal cortex (area PF/PFG) and superior temporal sulcus (STS). Both the PM and PF/PFG play a role in action coordination, whereas the STS is a region known to respond to the sight of body movements and the sound of actions. More recently, evidence has started to emerge that some mirror neurons in the PM have predictive properties (Keysers and Gazzola, 2014). When an action is observed, these neurons behave as predictors for the action that is most likely to follow next. Consider the sequence of actions relevant to grabbing a cup of coffee, which consists of a sequence of reaching, grabbing the cup and bringing the cup to the mouth. If one observes another person reaching his or her arm, this induces activity in the STS. Additionally, PM neurons that encode ’grabbing’ - the action that is likely to be performed next - fire. Such predictive properties are of great importance because it allows us to anticipate the actions of others. The proposed model explains the emergence of such neurons as a result of sensorimotor input of self-performed actions. When one performs a certain action, this has been coordinated by activity in the PM. Subsequently, one observes him- or herself perform that particular action. This is called reafference. Once the observation of the action has reached the STS, neurons in the PM that encode for the next action have already become active. If synaptic plasticity caused by Hebbian learning is assumed, the simultaneous activity in the STS of the observed action and activity in the PM for the next action causes an association between neurons in both regions. Keysers and Gazzola (2014) suggest that such an increase in synaptic strength could account for the emergence of predictive mirror neurons. 3 2.1.2 Rescorla Wagner Cooper et al. (2013b) used a computational model to investigate the development of mirror neurons. Two implementations of associative learning were considered; RescorlaWagner - a supervised learning rule that relies on reducing a prediction error - and an implementation of Hebbian learning and . Their computational model simulates results of an experimental study (Cook et al., 2010) that examined automatic imitation. Automatic imitation is a stimulus-response effect where the physical representation of features that are task-irrelevant facilitate similar responses but interfere with dissimilar responses. In this study participants were asked to open and close their hands in response to a color stimulus (the ’task-relevant’ stimulus) whilst watching a video of an opening or closing hand (the ’task-irrelevant’ stimulus). Research has shown that magnetic stimulation of the inferior frontal gyrus (an area where mirror neurons have been found) selectively disrupts automatic imitation. Therefore, automatic imitation is thought to be an index for mirror neuron activity. Cook et al. (2010) showed that automatic imitation is reduced more by contingent and signalled training than by non-contingent sensorimotor training. The results of this study have been successfully simulated by Cooper et al. (2013b) using a model based on the Rescorla-Wagner learning rule. The Hebbian learning rule, however, could not explain the reported data of Cook et al. (2010). Therefore, Cooper et al. (2013b) argue that prediction error-based learning rules, not Hebbian learning, can account for the development of mirror neurons. The study of Cooper et al. (2013b) suggests that Hebbian learning is not sufficient to impose mirror neuron behavior. However, the used implementation of Hebbian learning suffers from a computational problem. The weights of the connections between neurons imposed by this learning rule are in principle unbounded, which makes the learning rule unstable. More advanced types of Hebbian learning that adhere to such weight constraints, for example Oja’s rule (Oja, 1982), were not considered. Thus, even though Cooper et al. (2013b) have shown that supervised learning is sufficient to explain automatic imitation data, Hebbian learning should not be dismissed fully as a possible explanation for the emergence of mirror neurons. 2.2 Hebbian learning rules At the time Hebbian learning was introduced by Donald Hebb (1949), the field of neuroscience, let alone the field of neuroinformatics, was still in its infancy. Hebb’s postulate was introduced in a general, qualitative manner. It implies that learning occurs due to changes in synaptic strength, and that this is caused by a correlation between the input of a pre- and postsynaptic neuron. These changes have later been defined as long term potentiation (LTP) and long term depression (LTD), which refer to an increase and decrease of synaptic efficacy respectively (Kandel et al., 2000). However, the qualitative description of Hebb leaves much room for interpretation. Over time many computational implementations of Hebb’s postulate have been proposed. Here, four of these will be discussed: the basic Hebb rule, the covariance rule, BCM and Oja’s rule. 4 2.2.1 Basic Hebb Rule A simple rule that uses the presynaptic activity ai and postsynaptic activity aj to change the synaptic strength of the connection wj,i is the basic Hebb Rule (Hebb, 1949): ∆wj,i = αhai · aj i (1) Here, α is the learning rate, which determines how quickly the synaptic weights change. The brackets h and i denote that ∆wj,i is the average of all synaptic changes over a particular time. This articulates the idea that synaptic modification is a slow process. The rationale behind the formula is that if both neurons are relatively active, their synaptic connection will increase substantially. However, if one of them or both are less active, the synaptic strength will increase less. The major disadvantage of the basic Hebb rule is that the weights can only increase. Consequently, the basic Hebbian rule accounts for LTP but does not allow LTD. Since LTD has been recorded in neurons, a rule that fails to account for this phenomena is biologically implausible. Intuitively, it prevents the system from being able to ’unlearn’ what it has learned. Moreover, the basic Hebb rule is inherently unbounded, since weights can increase indefinitely. This is an effect that does not occur in biological systems due to the physical constraints to the growth of synapses. Aditionally, Hebb’s rule does not take baseline activity into account. In general, neurons always have some baseline of noisy activity. Since the simple Hebb rule will increase the weights even if the recorded activity is simply baseline activity, the weight updates can easily get distorted . 2.2.2 Covariance rule The covariance rule is an alternative to the basic Hebb rule that implements both LTP and LTD (Dayan and Abbott, 2001). It is defined as follows: cov(x, y) = 1 n−1 ∆wj,i = α · cov(ai , aj ) n X (xi − hxi)(yi − hyi) (2) (3) i=0 As in the basic Hebb rule, α refers to the learning rate. As suggested by its name, the covariance rule calculates the covariance of the activities of the pre- and postsynaptic neurons and uses this to determine the weight change. The covariance of two sequences is negative if they are uncorrelated, and positive if they are correlated. Therefore, the covariance rule allows for negative weight updates and thus accounts for both LTP and LTD. By substracting the average activity over a certain time period, the covariance rule naturally takes the baseline activity into account. However, similar as the basic Hebb rule, the covariance rule is still unbounded. In 5 theory, the weights can grow infinitely if the activation sequences keep being correlated. In biology this is not a problem because the synapses are naturally constrained by their physical properties to grow infinitely. In a computational model, however, such constraints have to be explicitly incorporated in the model, which is not the case for neither the covariance rule nor the basic Hebb rule. Another problem with the covariance rule is that ∆wj,i will always be the same as ∆wi,j , since the formula does not differentiate between the pre- and postsynaptic neuron. Separating the development of two reciprocal connections would make the learning rule more biologically plausible. 2.2.3 BCM BCM is a modifcation on the covariance rule that imposes a bound on the synaptic strengths. The rule, named after its introducers Bienenstock, Cooper and Munro (1982), is defined as follows: ∆wj,i = hai · aj (aj − θv )i (4) θv acts as a threshold that determines whether synapses are strengthened or weakened. To stabilizes synaptic plasticity, BCM reduces the synaptic weights of the postsynaptic neuron if it becomes too active. This can be achieved by implementing θv as a sliding threshold: ∆θv = ha2j − θv i (5) The sliding threshold induces competition between the synapses, because strengthening some synapses increases aj and thus increases θv , which in effect makes it more difficult for other synapses to increase afterwards. However, one disadvantage of BCM is that it does not take the baseline activity of the presynaptic neurons into account. 2.2.4 Oja’s rule Oja’s rule, introduced by Oja (1982), is an alternative learning rule that imposes bounds on the weights: ∆w[i,j] = hai · aj − α(a2j )w[i,j] i (6) Oja’s rule imposes an online re-normalization by constraining the sum of squares of the synaptic weights. More precisely, the bound of the weights is inversely proportional to α, that is, |w|2 will relax to α1 (Oja, 1982). By constraining the weight vector to be of constant length, Oja’s rule imposes competition between different synapses. However, similar to BCM, Oja’s rule does not take 6 the baseline activity of the presynaptic neuron into account. 2.3 Summary In sum, the field of neuroscience is currently evidencing a debate about the ontogeny of mirror neurons. The associative hypothesis, which assumes that mirror neurons emerge due to associative learning, seems to be a promising explanation. Several interpretations of associative learning have been proposed, namely Rescorla-Wagner and Hebbian learning. Research has shown that supervised learning rules such as Rescorla-Wagner are sufficient to explain results found in studies on automatic imitation. A different model that explains the emergence of predictive mirror neurons by means of Hebbian learning has been proposed, but a proof of concept has yet to be created. The chapter is concluded by a review of several implementations of Hebbian learning, including basic Hebb, the covariance rule, BCM and Oja’s rule. 7 3 Computational model In this chapter we will introduce the computational model that was used to simulate the emergence of mirror neurons. First, a motivation for the structure of the artificial neuron network will be presented. Then, the model for a single neuron is presented. Finally, it will be shown how this model can simulate action executions and observations. 3.1 A motivation for the structure of the model There are several regions in the brains of monkeys where mirror neurons have been found. Here, similar as in Keysers and Gazzola (2014), the focus lies on a set of three interconnected regions: the premotor cortex (PM, area F5), the inferior posterior parietal cortex (PF/PFG) and the superior temporal sulcus (STS). Both the PM and the PF/PFG are known to contain mirror neurons. Their main function is the coordination of actions, whereas the STS is an area in the temporal cortex that responds to the sight of body movements and the sound of actions. Neurons in the PM and PF/PFG are reciprocally connected, which means that the connectivity goes both from PM to PF/PFG as the other way around. Similarly, there are reciprocal connections between the STS and PF/PFG. Figure 1 shows the structure of the model used to simulate these areas. In order to make a simulation of the dynamics between these different brain regions feasible, three simplifications have been introduced. First, the intermediate step via the PF/PFG is omitted. This results in a model that has only reciprocal connections between the STS and PM. The artificial neural network will thus consist of two layers of neurons. Second, it is assumed that the PM and STS have similar encodings for the same action phases. For example, the action ‘drink a cup of coffee’ could consist of an action phase sequence of ‘grabbing’, ‘reaching’ and ‘bringing hand to mouth’. In this example, the PM and STS will each have three neurons that encode these three action phases. It is not claimed that a single action phase is actually encoded by a single neuron in the brain. In contrast, the ‘neurons’ of the artificial neural network should not be considered simulating single neurons. As will be described in the next section, neurons are modeled by activities that can take values between 0 and 1. In reality, however, a single neuron can only send a binary signal - the action potential - to postsynaptic neurons. Therefore, the artificial neurons presented here represent the average spiking rate of a group of neurons rather than the activity of a single neuron. Third, the connections from the PM to the STS will be restricted to inhibitory connections between neurons that encode the same action. These connections are inhibitory, because the activity from PM to STS is thought to be net inhibitory (Hietanen and Perrett, 1993). However, it is biologically implausible to have as many inhibitory connections as excitatory connections, since inhibitory synapses only comprise a small fraction of the total number of synapses in the brain (Kandel et al., 2000). Computationally, too many inhibitory connections can destabilize the network since they allow the PM to completely suppress all STS activity. For these reasons, only inhibitory connections from the PM to STS that encode the same action are modeled. 8 Figure 1: The setup used for the simulation. It consists of a two-layered neural network that represents the PM (red nodes) and STS (blue nodes) cortices. Each action phase, e.g. "reach" or "grasp", is encoded in one neuron in both the PM and STS. All STS neurons are connected to all PM neurons via excitatory connections (blue arrows), whereas PM neurons are connected via inhibitory synapses (red arrows) to the STS neurons that encode the same action. The weight matrices store the strengths of the connections. In the training phase, PM neurons are sequentially activated to simulate the execution of an action sequence, "reach, grasp, bring to mouth". The order of the excitation of the PM neurons is determined by a transition matrix, which contains the probabilities that certain actions are followed by others. Here, the sequence "reach (A) , grasp (B), bring to mouth (C)" is encoded, since the probabilities to transition from A → B and B → C are both 1. With a delay of 200 ms, the STS is excited in the same order. During the testing phase action observation is modeled. Therefore, only the STS is activated whilst still adhering to the probabilities encoded in the transition matrix. 3.2 Modeling a single neuron The activity of a single neuron is represented by αi , which can take a value between 0 and 1. The activity, similar as in Cooper et al. (2013a), is calculated as follows: ai (t + 1) = ρai (t) + (1 − ρ)σ(Ii (t)) X Ij (t) = (wj,i ai (t − 1)) + Ej + Bj + N (0, µ2 ) (7) (8) i Here, ρ is a value between 0 and 1 that determines to which extent previous activity persists over time. Ij (t) refers to the input to the neuron, which is transformed by a value between 0 and 1 by the sigmoid function σ. The value of Ij (t) depends among others 9 Parameter Persistance External excitation Bias Gaussian noise ρ Ej Bj µ Value 0.990 4.0 2.0 2.0 A B C D E F A 0 0 0 0 0.5 0.5 B 0 0 0 0 0.5 0.5 C 1 0 0 0 0 0 D 0 1 0 0 0 0 E 0 0 1 0 0 0 F 0 0 0 1 0 0 (a) The parameters used in modeling neurons, (b) Example of a transition matrix that encodes for the actions A-C-E and B-D-F. The drawn from Cooper et al. (2013b) matrix contains the probability that one action phase (row) is followed by another (column). Figure 2: Parameters used in the model (a) and an example of a transition matrix (b) on the weighted sum of the activities of all neurons. The weight matrix w contains the weights of the connections. When the artificial network is trained, w is altered. Additionally, the value of Ij (t) depends on three factors: Ej , Bj and µ. Ej refers to the amount of stimulation caused by other sources than neurons within the network and can be either on or off. External stimulation of PM neurons represents choosing the next action that will be executed. In the case of STS neurons, Ej represents the observation of a certain action in the real world. The input signal further consist of the activation bias Bj , which represents baseline activity of the neuron, and Gaussian noise determined by µ. Each time step t represents 1 ms of activity. The parameters ρ, Ej , Bj and µ are constant in this model. The values used in our simulations (figure 2a) were derived from previous work (Cooper et al., 2013b). All weight matrix entries are initialized to 1 before training commences. Additionally, the network will first be subjected to a burn-in phase. Here, the weight matrix is held constant and the neurons are allowed to reach a certain steady-state activity. 3.3 Modeling action execution and observation Keysers and Gazzola (2014) propose that mirror neuron activity emerges due to synaptic changes that result from simultaneous action execution and reafference (the observation of self-performed actions). This implies that the simulation of these mechanics should consist of two separate phases. In the first phase, the training phase, action execution and reafference are simulated. During this phase, the weights are being updated. The second phase, the testing phase, consists of the mere observation of actions. If the correct weight changes have been made during the training phase, the PM neurons should start behaving as mirror neurons. The remainder of this section explains how the training and testing phase have been simulated. In the artificial neural network, PM activity represents action execution whereas STS activity represents action observation. In essence, the action observation of self-performed actions is a delayed version of the action execution signal. It takes approximately 100 ms for a signal in the PM to lead to an actual action execution. After another 100 ms 10 t (ms) 0 300 600 PM-A [1, [0, [0, PM-B 0, 1, 0, PM-C 0] 0] 1] t (ms) 200 500 700 (a) An example of an excitation sequence of PM neurons during the action phase. If 1, Ej is added to the input Ij (see formula 8). If 0, nothing is added. Note that the external excitation persists until a transition is made to a new action phase, which happens after 300 ms. STS-A [1, [0, [0, STS-B 0, 1, 0, STS-C 0] 0] 1] (b) An example of an excitation sequence of the STS neurons. Note that this is simply a delayed version of the action sequence in c, with a delay of 200 ms. Figure 3: Examples of trials of the STS and PM during the training phase the action observation reaches the STS. This gives a total delay of 200 ms. The transitions from one action phase to the next are coordinated by a motor planner, which chooses the next action based on a probability distribution that is encoded in a transition matrix. A simple example of such a transition matrix is shown in figure 2b. It encodes two actions, a → c → e and b → d → f . The first sequence can be derived from the transition matrix since the probabilities to go from both a to c (t[0, 1] = 1) and c to e (t[1, 2] = 1) are 1. It is assumed that the probability of each entire action sequence is the same. Therefore, each last action phase in a sequence has a probability of n1 to go to the first action phase of a new sequence, with n being the total number of action sequences. Initially, the motor planner will choose one of the first action phases as a starting point. Once an action phase is selected, the PM neuron that encodes for this particular action is externally stimulated (value 1 in figure 3a). The complete list of the excitations at one particular time step is referred to as a trial. It is assumed that the length of one action phase is 300 ms, similar as in Keysers and Gazzola (2014). After 300 ms, the next action phase is chosen at random based on the probabilities encoded in the transition matrix, which results in a new trial. Action observation entails the same trial, only with a delay of 200 ms (figure 3b). During the training phase, both the PM and STS trials are active. During the testing phase, only the STS neurons are excited. 3.4 Learning rules During the training phase, the weight vector w will be updated according to a certain neuron rule. Each of the Hebbian learning rules presented in chapter 2 has been implemented. However, since Oja’s rule does not naturally handle the baseline activity well, we propose an alternative to Oja’s rule. The weight updates are the same as in the original Oja’s rule (formula 6). However, a threshold is imposed on all the activities of the neurons: 11 ( ak , if ak ≥θ ak = 0, otherwise (9) This threshold prevents the weights to change from unsubstantial activities. Note that the addition of the threshold cannot make Oja’s rule unbounded, since the bound of the original rule only depends on α. Moreover, because the threshold introduces zero correlation for certain periods of time, the weights will actually be lower compared to weights imposed by the original learning rule. 3.5 Summary In this chapter the computational model of the artifical network that models connections between the premotor cortex (PM) and the superior temporal sulcus (STS) has been presented. The general structure of connectivity in the network is a result of three simplifying assumptions. First, the intermediate step of the PM/PFG has been omitted. Second, each neuron only represents one action phase. Consequently, the neural network consists of two equally sized layers. Third, the inhibitory P M → ST S connections only exist between PM and STS neurons that encode the same action. Additionally, the formula to calculate the activity of a single neuron has been presented, together with an elaboration on how a transition matrix can be used to simulate action execution and observation. Finally, a variation of Oja’s rule that uses a threshold has been introduced. 12 4 Analysis procedure In this chapter an analysis procedure that can detect mirror neuron behavior is introduced. In contrast to the work of Cooper et al. (2013b), the simulation presented here is not a simulation of one particular experiment. Therefore, it cannot be compared with experimental data in a supervised manner. This requires designing new ways of investigating a quantification of mirror neuron behavior. First, it will be discussed what mirror neuron behavior would visually look like in the simulation. Subsequently, a procedure for calculating a quantitative measurement for the level of mirror neuron behavior in a sequence of neuron activities is proposed. 4.1 A visualization of mirror neuron behavior Before an evaluation metric can be designed, it must be clear what is considered to be ’mirror-like behavior’. Figure 4a shows activity that we deem to be typical for mirror neuron behavior. The STS has been excited externally in a particular sequence and the PM mimics the behavior of the visual neurons. Figure 4b shows predictive mirror neuron behavior. The activity of STS-A induces activity in PM-B, which is the action that is the most likely to follow next. Figure 4c shows a combination of the two, in which the activity of STS-A induces activity of PM-B. In contrast to figure 4b, this activity persists until STS-B has stopped to be active. The combined activity can explain both normal and predictive mirror neuron behavior. Note that these kind of behaviors are expected to emerge only during the testing phase. During the training phase, the PM neurons will not be caused by STS activity but by external excitations. 4.2 Analysis procedure A procedure to measure mirror neuron behavior was designed for the simulations presented in this work. All three types of mirror neuron behavior follow approximately the same sequence of spikes (except that predictive mirror neurons surpass the first action of a sequence). Therefore, the analysis procedure consists of the creation of a transition matrix that describes sequences of activity in both the PM and STS cortices. By comparing the transition matrices, it can be determined to what extent the PM and STS activity is similar, and thus, to what extent mirror neuron behavior has emerged. The following procedure was used to calculate a transition matrix from recorded activity. First, a low-pass filter is applied to the activity signals of all neurons (figure 4a) to smoothen the signal (figure 4b). Then, significant peaks are substracted by setting a threshold equal to the mean plus one standard deviation (figure 4c). Subsequently, for each peak the neuron whose peak is the closest follow-up is determined. For a peak at time t this is done as follows. First, the thresholded peaks of all neurons from time t to t+3000 are collected (figure 4d). If a signal contains multiple peaks, all but the first peak are removed from the signal. Then, a cross correlation analysis is performed between all pairs of the original signal and the other signals. From this the delays that have the highst cross correlation can be determined (figure 4e). If the delay of a certain neuron is 13 (a) Normal mirror neuron behavior. The activity of the PM neurons mirrors exactly the activation of the STS. (b) Predictive mirror neuron behavior. The activity of PM neurons is the same as the activity of STS neurons that will be active next in the action sequence. For example, the green PM neuron, which usually precedes a yellow neuron, responds to the yellow STS neuron. (c) Combination of normal and predictive mirror neuron behavior. PM neurons respond both to the same action phase and to the action phase that usually precedes the action phase they encode. Figure 4: Examples of three types of mirror neuron-like behavior very low (−25 to 25 ms) the neuron considered to be simultaneous with the peak that is under investigation. The neuron i which signal has the lowest positive delay di is selected as the closest successor. In the transition matrix, tj,i is increased by one (figure 4f). If the delay dn of another neuron n is very close to the closest delay (dn − di < 50 ms) it is also selected as the closest successor. In this case, the total probability is evenly distributed over the transition matrix. As a final step, the rows in the transition matrix are normalized. The above procedure can be applied both to STS and PM activity which results in two matrices, tsts and tpm . In order to determine the similarity s of the two matrices, one can calculate the Frobenius norm of their difference matrix, which gives the error : n X n p X pm 2 = ( (tsts j,i − tj,i ) ) (10) i=1 j=1 A low error would indicate a high level of mirror neuron-like behavior. To determine whether or not a low retrieved error is significant, it will be compared to the distribution 14 (a) The recorded activity in the neurons (b) Activity after application of low-pass filter (c) All activities lower than the threshold are set to zero (d) Activities within 3000 ms after the start of the first peak of neuron B A A B C D B C D +1 (f) The transition matrix is updated for the transition from neuron B to the neuron C, which has the lowest positive delay. (e) Delays are determined by calculating the maximal cross correlation. Figure 5: A visualization of the procedure used to create a transition matrix from recorded activity. Step D, E and F are repeated for all peaks detected in step A B and C. Afterwards, the rows of the transition matrix are normalized. 15 of random errors. The distribution of errors is approximated by calculating the difference between a set of uniformly at random generated stochastic matrices and the STS matrix. If the retrieved error is lower than 2% of the errors determined by these random matrices, it will be deemed significant. In the case of predictive mirror neuron behavior (figure 3b), the transition from one action sequence to the next will always surpass the first action. Therefore, this methodology works best for normal and combined mirror behavior (figure 3a and 3c). Note that the method presented here cannot distinguish between the different types of mirror neuron behavior. 4.3 Summary In this chapter a quantitative measure for the detection of mirror neuron behavior has been presented. First, three types of mirror neuron behavior (normal, predictive and combined) have been identified. Second, the analysis procedure to detect mirror neuron behavior is described. This procedure consists of the generation of a transition matrix of both the STS and PM neurons. Afterwards, these transition matrices can be compared using the Frobenius norm of their difference matrix to obtain the error . This analysis procedure can detect all presented types (normal, predictive and combined) of mirror neuron behavior, though it will generally return a higher error for predictive mirror neuron behavior. 16 5 Results In this chapter two types of results will be discussed. First, a comparative analysis of the different learning rules that shows how well each can account for mirror neuron behavior is presented . Second, a parameter space analysis of the thresholded Oja’s rule is used to show to what extent different parameter settings affect the level of mirror neuron behavior that can be observed. 5.1 Comparison of learning rules Figure 6 shows the mean and standard deviation of the error of the transition matrices for 10 simulations of basic Hebb, covariance rule, BCM, Oja’s rule and the thresholded Oja’s rule after a training phase of 250.000 ms for one action sequence consisting of four action phases. Additionally, a hinton graph of the weight matrices is presented in figure 7. Figure 8 shows the recorded activities in the testing phase for all rules. As visualized in figure 8a, applying the basic Hebb rule does not impose mirror neuron behavior. The weight matrix (figure 7a) shows that the weights for all neurons are approximately the same, which explains why the activities in figure 8b are also very similar. This effect is caused by the baseline activity that is present for all neurons, which influences the weight changes imposed by Hebb’s rule. Figure 6: The average and standard deviation of the error of 10 simulations of the five learning rules. Each simulation consisted of 250.000 ms in both the training and testing phase, for a single action sequence of 4 action phases. The blue line indicates the value under which the norm is deemed to be significant (< 2% of 10.000.000 randomly generated matrices). The covariance rule, shown in figure 8b, naturally takes the baseline activity into account. The weight matrix is more diverse than that of the basic Hebb rule (figure 7b). This causes the average error to be less high than that of Basic Hebb, but still not 17 (a) Basic hebb (α = 0.044), m = 2.7 (d) Oja’s rule (θ = 0.5, αe = 10−1 ,αi = 1−1 ), m = 3.59 (b) Covariance (α = 0.044), m = 4.8 (c) BCM (θinit = 0), m = 20.3 (e) Oja’s rule (θ = 0.0, αe = 10−1 , αi = 1−1 ), m = 3.79 Figure 7: A hinton graph that shows the relative differences of the weights of the weight matrix of all rules. The lower left corner shows all weights from STS to PM neurons, whereas the upper right corner shows all the PM to STS neurons. Blue and red squares denote inhibitory and excitatory neurons respectively. They are normalized by the maximum value of the the weight matrix, which is denoted beneath each figure by m. significant. Moreover, as enpicted by the large variance of the covariance rule in figure 6, the results are unstable. Figure 8c shows the activities after applying BCM, a modification on the covariance rule which imposes a bound on the synaptic strengths. STS activity is completely suppressed during the training phase. Theoretically, BCM should impose bounds on the weights due to competition between the synapses. However, in this case these bounds are still too high which causes the suppression of STS activity during the training phase due to strong inhibitory weights from PM neurons. As a consequence, BCM performs approximately as well as basic hebb, as shown in figure 6. An alternative to BCM is Oja’s rule. In contrast to BCM, the bounds of the weights can be directly affected by the α parameter. To account for differences between the bounds for inhibitory and excitatory neurons that occur in nature, different bounds were used. Recall that α−1 is proportional to the bounds of |w|2 . Here, αinhibitory was set to 1−1 and αexcitatory was set to 10−1 . Figure 7d shows that, if applied directly, all the 18 (a) Basic hebb, α = 0.044 (b) Covariance, α = 0.044 (c) BCM, θinit = 0 (d) Oja’s rule, θ = 0, αe = 10−1 , αi−1 Figure 8: A visualisation of the performance of all learning rules. Each color denotes the same action phase. The lines above the graph of STS activity show the time each neuron was externally excited. These are the last 4000 ms of a simulation with a training- and test phase of 250.000 ms for four neurons that encode one action sequence (a-b-c-d). 19 (e) Oja’s rule, θ = 0.5, αe = 10−1 , αi−1 (a) θ = 0.3 (b) θ = 0.5. (c) θ = 0.7 Figure 9: Results of quantitative parameter space analysis. Different images depict the results for different thresholds θ. The x-axis shows the bounds for inhibitory neurons (αi−1 ), whereas the y-axis shows the bounds for excitatory neurons (αe−1 ). The lower the error (denoted by a color range from dark red to light yellow) the better the performance was for a parameter setting. The areas delineated by the blue line are all retrieved errors that are lower than the errors of 98% of 10 million randomly generated matrices. If the model is set to these parameter settings, mirror neuron behavior emerges. PM neurons to behave similarly. Since no mirror behavior occurs, the average error is high. To account for the baseline activity of the neurons, the learning rule was altered as proposed in section 2.3, and the threshold θ was set to 0.5. As shown in figure 8e, this results in a combination of normal and predictive mirror neuron behavior. This results in an error that is approximately 10 times lower than the other learning rules (figure 6). 5.2 Parameter space analysis of Oja’s rule The thresholded Oja’s rule has three parameters, namely αinhibitory , αexcitatory and threshold θ. A parameter space analysis was performed to see to what extent different parameter settings change the outcome of applying Oja’s rule. The thresholded Oja’s rule was applied in 500 simulations with different parameter settings. Both the training phase and testing phase consisted of 1.000.000 ms. 19 action phases were modeled, divided over 4 action sequences of length 5, giving a total network size of 38 nodes. Since modeling 4 action sequences of length 5 requires 20 nodes, and we only model 19, 20 two sequences partly overlap. The procedure as described in chapter 4 was applied to the activities in the testing phase to determine the error of the difference of the PM and STS transition matrices. Additionally, the error of 10.000.000 random matrices was calculated. These were used to approximate the p-values at which a low error is deemed to be significant. The results of the parameter space analysis are shown in figure 9. The axes show the inverse of α since this is approximately equal to the bounds of the weight matrix. Each figure depicts the retrieved error for a different threshold θ value. The blue line indicates the section in which the error is lower than 2% of 10.000.000 randomly obtained errors. It shows that if the threshold is relatively low (0.3, figure 9a), Oja’s rule does not impose mirror neuron behavior at all. Figure 9b shows that a threshold of 0.5 does imposes mirror behavior if, in general, the bound of excitatory connections is higher than the bound of inhibitory connections. If both parameters are higher than approximately 15, no mirror behavior emerges. If the threshold is very high (0.7, figure 9c), neuron mirror behavior is imposed, but to lesser extent than when the threshold is 0.5. Here, the excitatory bounds much exceed the inhibitory bounds to a larger extent for mirror neuron behavior to emerge. 5.3 Summary Five different learning rules have been implemented. An analysis of simulations of one simple action sequence shows that, of the rules considered, only the thresholded Oja’s rule is able to produce mirror neuron behavior. More precisely, it can account for both normal and predictive mirror neuron behavior. Furthermore, a parameter space analysis shows that if the threshold is set too low, no mirror neuron behavior is imposed. A threshold of 0.5 shows a large field of values in which mirror neuron behavior is imposed. In general, the bounds for inhibitory neurons have to be strictly smaller than those of excitatory neurons to impose mirror neuron behavior. If the threshold becomes too high, excitatory bounds much be about twice as high as inhibitory bounds. 21 6 Conclusion In previous work it has been proposed that Hebbian learning could be responsible for the ontogeny of predictive mirror neurons (Keysers and Gazzola, 2014). Here, we have shown that a variation of Oja’s rule (an implementation of Hebbian learning) is sufficient to explain the emergence of mirror neurons. An artificial neural network that simulates the interactions between the premotor cortex (PM) and the superior temporal sulcus (STS) has been created. Different implementations of Hebbian learning have been compared in performance on a simple action sequence. Additionally, a parameter space analysis has been performed on the proposed thresholded Oja’s rule to determine the sensitivity of the parameters on its performance. We have identified that from the learning rules considered, only the thresholded Oja’s rule is sufficient to impose mirror neuron behavior. The other learning rules (basic Hebb, covariance, BCM and the original Oja’s rule) are subject to at least one of the following three limitations. First, both the covariance rule and the basic Hebb rule are unbounded, which makes them biologically implausible. Second, all learning rules except for the covariance rule are sensitive to baseline activity. These changes overshadow associations between significant STS- and PM activity. This prevents mirror neuron behavior from emerging. Third, if the inhibitory neurons are not bounded strong enough, as in BCM and the original Oja’s rule, PM inhibition causes a complete suppression of STS activations. This prevents any association between the PM and STS to occur. A variation of Oja’s rule that uses a threshold and different bounds for inhibitory and excitatory synapses has been shown to surpass each of these limitations. A parameter space analysis has indicated that the parameters of the proposed thresholded Oja’s rule must adhere to two constraints for mirror neuron behavior to emerge. First, the threshold value must be higher than the baseline activity, but lower than the highest peaks measured. If the threshold is too low, small variances in baseline activity impose weight changes that prevent the correct associations form being made. Choosing the proper threshold value can be viewed as intrinsic homeostatic plasticity. This refers to the capacity of neurons to regulate their own excitability relative to network activity (Turrigiano and Nelson, 2004). Second, mirror neuron behavior can only be imposed if the bounds for the excitatory neurons are higher than those of the inhibitory neurons. This is necessary because otherwise inihbitory PM neurons will completely suppress STS activity which prevents associations from being able to be learned. In conclusion, we have shown that a thresholded Oja’s rule is sufficient to account for the emergence of mirror neurons in an artificial neural network that simulates interactions between the PM and STS cortices. Therefore, this work provides positive evidence for the proposal that Hebbian learning is sufficient to account for the emergence of mirror neurons. In the broader sense, this work promotes the idea that statistical sensory motor contingencies suffice in the explanation for the ontogeny of mirror neurons. Therefore, it can be regarded as positive evidence for the association hypothesis. 22 7 7.1 Discussion and future work Limitations of this study One of the assumptions underlying the model presented here is that the STS encodes observations of actions of others similarly as the observations of self-performed actions. While it has been shown that the area STS responds to the sight and sound of actions, it has not been shown indisputable that the encoding for reafference (sensory input from one’s own action) and others’ actions is the same. Further research should indicate whether or not this assumption is valid. Another limitation of the work presented here is that the input data to the ANN is simplified compared to action execution and observation in the real world. While the time delays that were used are comparable with what is observed in the action observation and execution of primates Keysers and Gazzola (2014), the real world is more noisy and less predictable than the action sequences that were used. For example, once an action is chosen in the simulation, the entire action is always executed without interventions. Future research should indicate whether or not the results presented here still hold when the network is exposed to more complicated and less predictable action sequences. 7.2 Future work It has been argued that that Rescorla-Wagner, and not Hebbian learning, account for the emergence of mirror neurons (Cooper et al., 2013b). However, Oja’s rule was not considered by Cooper et al. (2013b). In this work we have shown that a modified version of Oja’s rule which is genuinely unsupervised is sufficient for the emergence of mirror neurons. In further research, Oja’s rule should be applied to the experimental data presented by Cooper et al. (2013b) to determine if it is sufficient to replicate the results of the experimental study of Cook et al. (2010). In the current implementation of the thresholded Oja’s rule, the threshold was determined manually. An extension of this work could be to model homeostatic plasticity, in which the threshold value is dynamically set. Keysers and Gazzola (2014) argued that the inhibitory connections from the PM to the STS could behave as a ’prediction error’. If the PM correctly predicts the next action, it inhibits STS activity which would indicate that no audiovisual confirmation is required. However, as shown in this work, this can easily lead to complete surpression of STS activity. A chain of activities in the PM cortex should then be imposed without an exchange of information with the STS. In the model presented here, such a sequence is not possible because there are no lateral connections modelled. In an extension of this work one could add lateral connections to the model. Ideally, the transition matrix would be completely omitted and replaced by interactions of neurons via lateral connections. As a more realistic extension of this work, one would need to model the ’mirror circuit’. If each cortical area is considered a node of a graph, then these nodes would have to be simulated using spiking neuronal models with at least three cortical layers; one for input, one for prediction and one for prediction error. These models will consist of 23 approximately 1000 neurons per layer at every node and will suffice to represent a much richer repertoire of actions. Detailed work on the anatomy of the connections between these nodes will inform the model on connection probabilities between layers within and across nodes. A model of this nature would be instrumental in determining the origin of mirror neurons. 24 References Bienenstock, E. L., Cooper, L. N., and Munro, P. W. (1982). Theory for the development of neuron selectivity: orientation specificity and binocular interaction in visual cortex. The Journal of Neuroscience, 2(1):32–48. Catmur, C. (2013). Sensorimotor learning and the ontogeny of the mirror neuron system. Neuroscience letters, 540:21–27. Cook, R., Press, C., Dickinson, A., and Heyes, C. (2010). Acquisition of automatic imitation is sensitive to sensorimotor contingency. Journal of Experimental Psychology: Human Perception and Performance, 36(4):840. Cooper, R. P., Catmur, C., and Heyes, C. (2013a). Are automatic imitation and spatial compatibility mediated by different processes? Cognitive Science, 37(4):605–630. Cooper, R. P., Cook, R., Dickinson, A., and Heyes, C. M. (2013b). Associative (not hebbian) learning and the mirror neuron system. Neuroscience letters, 540:28–36. Dayan, P. and Abbott, L. F. (2001). Theoretical neuroscience. Cambridge, MA: MIT Press. Di Pellegrino, G., Fadiga, L., Fogassi, L., Gallese, V., and Rizzolatti, G. (1992). Understanding motor events: a neurophysiological study. Experimental brain research, 91(1):176–180. Giudice, M. D., Manera, V., and Keysers, C. (2009). Programmed to learn? the ontogeny of mirror neurons. Developmental science, 12(2):350–363. Hebb, D. O. (1949). The organization of behavior: A neuropsychological approach. John Wiley & Sons. Heyes, C. (2010). Where do mirror neurons come from? Neuroscience Biobehavioral Reviews, 34(4):575 – 583. Hietanen, J. and Perrett, D. (1993). Motion sensitive cells in the macaque superior temporal polysensory area. Experimental brain research, 93(1):117–128. Kandel, E. R., Schwartz, J. H., Jessell, T. M., et al. (2000). Principles of neural science, volume 4. McGraw-Hill New York. Keysers, C. and Gazzola, V. (2014). Hebbian learning and predictive mirror neurons for actions, sensations and emotions. Philosophical Transactions of the Royal Society B: Biological Sciences, 369(1644):20130175. Oja, E. (1982). Simplified neuron model as a principal component analyzer. Journal of mathematical biology, 15(3):267–273. Terry, W. S. (2006). Learning and memory: Basic principles, processes, and procedures. Pearson/Allyn and Bacon Boston, MA. Turrigiano, G. G. and Nelson, S. B. (2004). Homeostatic plasticity in the developing nervous system. Nature Reviews Neuroscience, 5(2):97–107.