Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Emotion and memory wikipedia , lookup
Executive functions wikipedia , lookup
Sensory cue wikipedia , lookup
Single-unit recording wikipedia , lookup
Clinical neurochemistry wikipedia , lookup
Neuroanatomy wikipedia , lookup
Neural oscillation wikipedia , lookup
Neuropsychopharmacology wikipedia , lookup
Central pattern generator wikipedia , lookup
Metastability in the brain wikipedia , lookup
Neuroesthetics wikipedia , lookup
Biological neuron model wikipedia , lookup
Synaptic gating wikipedia , lookup
Optogenetics wikipedia , lookup
Premovement neuronal activity wikipedia , lookup
Neuroethology wikipedia , lookup
Nervous system network models wikipedia , lookup
Time perception wikipedia , lookup
Evoked potential wikipedia , lookup
Channelrhodopsin wikipedia , lookup
Visual extinction wikipedia , lookup
Neural correlates of consciousness wikipedia , lookup
Caridoid escape reaction wikipedia , lookup
Perception of infrasound wikipedia , lookup
Response priming wikipedia , lookup
Efficient coding hypothesis wikipedia , lookup
Neural coding wikipedia , lookup
C1 and P1 (neuroscience) wikipedia , lookup
Psychophysics wikipedia , lookup
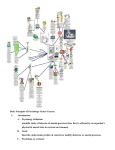
865 The Journal of Experimental Biology 210, 865-880 Published by The Company of Biologists 2007 doi:10.1242/jeb.02707 Escape behavior and neuronal responses to looming stimuli in the crab Chasmagnathus granulatus (Decapoda: Grapsidae) Damián Oliva, Violeta Medan and Daniel Tomsic* Laboratorio de Neurobiología de la Memoria, Depto. Fisiología, Biología Molecular y Celular, Facultad de Ciencias Exactas y Naturales, Universidad de Buenos Aires, IFIBYNE-CONICET, Buenos Aires 1428, Argentina *Author for correspondence (e-mail: [email protected]) Accepted 4 January 2007 Summary Behavioral responses to looming stimuli have been that trigger the behavioral response; (v) the neurons studied in many vertebrate and invertebrate species, but respond to the object approach by increasing their rate of neurons sensitive to looming have been investigated in very firing in a way that closely matches the dynamics of the few animals. In this paper we introduce a new image expansion. Finally, we compare the neuronal with experimental model using the crab Chasmagnathus the behavioral response showing that: (vi) differences in granulatus, which allows investigation of the processes of the neuronal responses to looming, receding or laterally looming detection and escape decision at both the moving stimuli closely reflect the behavioral differences to behavioral and neuronal levels. By analyzing the escape such stimuli; (vii) during looming, the crab starts to run response of the crab in a walking simulator device we show soon after the looming-sensitive neurons begin to increase that: (i) a robust and reliable escape response can be their firing rate. The increase in the running speed during elicited by computer-generated looming stimuli in all stimulus approach faithfully follows the increment in the tested animals; (ii) parameters such as distance, speed, firing rate, until the moment of maximum stimulus timing and directionality of the escape run, are easy to expansion. Thereafter, the neurons abruptly stop firing record and quantify precisely in the walking device; (iii) and the animal immediately decelerates its run. The although the magnitude of escape varies between animals results are discussed in connection with studies of and stimulus presentations, the timing of the response is responses to looming stimuli in the locust. remarkably consistent and does not habituate at 3·min stimulus intervals. We then study the response of neurons Supplementary material available online at http://jeb.biologists.org/cgi/content/full/210/5/865/DC1 from the brain of the crab by means of intracellular recordings in the intact animal and show that: (iv) two subclasses of previously identified movement detector Key words: visual behavior, escape response, looming detection, neurons from the lobula (third optic neuropil) exhibit looming sensitive neurons, intracellular recording, Crustacea, Chasmagnathus granulatus. robust and reliable responses to the same looming stimuli Introduction Looming images can provide animals with information about the speed and direction of approach of objects, when both these objects and the animals themselves move. The ability to detect and react to looming objects is present in most visual animals from insects to mammals, even though their visual systems are very different. This raises the question of whether analysis of retinal image expansions is performed by similar or different computational principles across species. To trigger a collision-avoidance response upon an expanding image, animals might perform several different neural calculations. One possibility is a ‘time-to-contact’ model, where the individual determines the time left to collision with an object (e.g. Hatsopoulus et al., 1995; Lee, 1976; Wang and Frost, 1992). Alternatively, an animal may generate a response when the image across its retina subtends a certain size (e.g. Glantz, 1974; Nalbach, 1990b) or when the borders of the expanding image exceed a certain retinal speed (e.g. Hemmi, 2005b). Finally, animals might integrate image motion over space and time, with responses occurring when the integral exceeds a threshold, referred to as the ‘spatio-temporal integration’ model (Borst and Bahde, 1988). Behavioral reactions elicited by looming stimuli have been studied in species as diverse as flies (e.g. Jablonski and Strausfeld, 2000; Tammero and Dickinson, 2002), crabs (e.g. Hemmi, 2005a; Hemmi, 2005b), frogs (Yamamoto et al., 2003), chickens (Evans et al., 1993), gannets (Lee and Reddish, 1981), wood-chucks (Kramer and Bonenfant, 1997), monkeys THE JOURNAL OF EXPERIMENTAL BIOLOGY 866 D. Oliva, V. Medan and D. Tomsic (e.g. Maier et al., 2004) and humans (e.g. Regan and Hamstra, 1993). Conversely, electrophysiological investigations of neurons underlying looming detection have been performed in relatively few species [e.g. flies (Borst, 1991), hawkmoth (Wicklein and Strausfeld, 2000), goldfish (Gallagher and Northmore, 2006), locust (Gabbiani et al., 2002; Gray, 2005; Rind and Simmons, 1992), pigeon (Wang and Frost, 1992; Wu et al., 2005)], but it is only in locusts where attempts have been made to relate the neuronal activity with an actual behavioral response (e.g. Gray et al., 2001; Santer et al., 2005; Santer et al., 2006). The visual system of locusts contains several types of movement-sensitive interneurons (Rind, 1987). Two of these, known as the Lobula Giant Movement Detector 1 and 2 (LGMD1 and LGMD2), strongly respond to looming stimuli (Simmons and Rind, 1997). Continuous effort from different laboratories has concentrated almost exclusively on studying the response to looming stimuli of the LGMD1 (usually just called LGMD). Nonetheless, the exact mechanism by which this neuron encodes information and uses spike trains to trigger behavioral reactions remains contentious (e.g. Rind and Santer, 2004). There are thus good reasons for the development of additional experimental models in which both behavioral and neuronal studies can be performed. In semiterrestrial crabs, the conspicuous escape reaction elicited by looming stimuli has largely captured the attention of field researchers (e.g. Hemmi and Zeil, 2005; Jennions et al., 2003; Land and Layne, 1995a; Land and Layne, 1995b; Nalbach, 1990a). Recently, however, it has become evident that semiterrestrial crabs offer excellent opportunities for investigating the processing of biologically meaningful visual stimuli at the neurophysiological level, because stable intracellular recordings can be made in the intact, awake animal (Berón de Astrada et al., 2001; Johnson et al., 2002; Nalbach, 1990b; Tomsic et al., 2003). Thus it is possible to characterize several classes of neurons from the optic neuropils of the crab Chasmagnathus by their response to visual and tactile stimuli. Amongst these classes, there is a generic group of large tangential neurons from the lobula that share a clear preference for motion stimuli. Intracellular dye injections revealed that these neurons arborize extensively in the lobula and in the lateral protocerebrum, and their axons project centripetally, leaving the optic ganglia through the protocerebral tract. In the lobula, the dendritic trees are organized as tangential branches that run parallel to each other, indicating that the cells sample information from a large part of the visual field (Berón de Astrada and Tomsic, 2002; Sztarker et al., 2005). The wide field movement detector neurons (MDNs) of the crab were previously investigated in connection with the escape response of the animal to a stimulus moving horizontally overhead (Berón de Astrada and Tomsic, 2002; Sztarker and Tomsic, 2004). The profile of elicited spikes of MDNs to this stimulus was found to correspond well with that of the behavioral reaction. Neurons reacted to this stimulus with a delay of 30–50·ms, and their elicited activity anticipated the behavioral response by about 120·ms. In addition, the short- and long-term reduction of the escape response caused by stimulus repetitions can be entirely accounted for by the reduction of the response of MDNs to that stimulation (Tomsic et al., 2003). Altogether, these results indicate that MDNs are good candidates to be involved in the decision to initiate the escape response to visual danger stimuli. By examining both the animal’s performance in a walking simulating device and the neuronal responses through in vivo intracellular recording, we identify in this paper two subclasses of MDNs that appear to play a fundamental role in the escape response of the crab to looming stimuli. Materials and methods Animals Animals were adult male Chasmagnathus granulatus Dana 1851 crabs 2.7–3.0·cm across the carapace, weighing approximately 17·g, collected in the rías (narrow coastal inlets) of San Clemente del Tuyú, Argentina, and transported to the laboratory, where they were lodged in plastic tanks (35·cm⫻48·cm⫻27·cm) filled to 2·cm depth with diluted seawater to a density of 20 crabs per tank. Water used in tanks and other containers during the experiments was prepared using hw-Marinex (Winex, Hamburg, Germany), salinity 10–14‰, pH 7.4–7.6, and maintained within a temperature range of 22–24°C. The holding and experimental rooms were maintained on a 12·h:12·h light:dark cycle (lights on 07.00·h to 19:00·h) and the experiments were run between 08.00·h and 19:00·h. Experiments were performed within the first 2 weeks after the animal’s arrival. Crabs were fed rabbit pellets (Nutrients, Buenos Aires, Argentina) every 3 days and after feeding the water was changed. Following experiments, animals used in behavioral experiments were returned to the field and released in an area separated by 30·km from the capture area. Visual stimuli Computer-generated visual stimuli were projected either simultaneously or alternatively in four flat screen monitors (Phillips 107T, Suzhou, China; horizontal and vertical screen dimensions 32·cm⫻24·cm respectively, refreshing rate 60·Hz), located at 20·cm in front, above and at both sides of the animal (Fig.·1A). The monitors were located inside a Faraday cage completely covered to prevent outside visual stimuli from reaching the animal, and anti-glare screens reduced reflections among the monitors. Three of the monitors stood on a vibration-damped table and the fourth was hanging from the ceiling. Both behavioral and electrophysiological experiments began after a black curtain was lowered in the front part of the cage and after the animal had remained visually undisturbed for 10·min. All visual stimuli were generated from a single PC using commercial software (Presentation 5.3, Neurobehavioral Systems Inc., Albany, CA, USA). The stimulus image generated from the PC was first split and then sent to four selector switches. From each selector the video signal could be rapidly turned on and off. The selectors as well as other control THE JOURNAL OF EXPERIMENTAL BIOLOGY Looming detection in crabs A Front screen Right screen Left screen Selector switch Reads mouse 1 Reads mouse 2 Trigger Image generator B Screen Eye 20 cm Virtual object Fig.·1. Experimental set-up and generation of visual stimuli. (A) The set-up for delivering visual stimuli is located inside a sealed Faraday cage. Four monitors are located at 20·cm to the sides, in front and above the animal (the upper monitor is not shown). Stimulus signals generated by PC1 were directed to any one of the four monitors through a selector switch located outside the Faraday cage. A second computer (PC2) was used in combination with PC1 to record the response of the crab. (B) The looming stimulus was a simulated projection of an approaching object from one of the monitor screens. The simulation corresponded to a black square object of 5·cm that approached from a distance of 70·cm at a constant velocity of 20·cm·s–1 (see Materials and methods). systems used during the experiments were located outside the Faraday cage. In this way, a range of different stimuli could be selected and presented to different parts of the visual field without distressing the animal, while behavior or neuronal activity was being recorded. Visual simulations generated by computer may differ in many ways from the visual input experienced under natural conditions. Thus, for example, the refreshing rate of a monitor screen may impose a severe constraint on the study of the visual system of animals with a high flicker fusion frequency. We did not measure the fusion frequency in Chasmagnathus, but are 867 confident that it is lower than the refresh rate of our monitors. Flicker fusion in other crabs (the fiddler crab Uca pugilator) was found to be below 50·Hz (Layne et al., 1997) and in the crayfish, responses to looming stimuli corresponding to real approaching objects or to filmed representations projected at 24·frames·s–1, rendered identical results (Glantz, 1974). We found no response differences in Chasmagnathus when comparing a black sheet of cardboard moving overhead with the computer-generated image (V.M. and D.T., unpublished observations). The simulated looming stimulus used in the present study consisted of a 5·cm black square, which approached over a distance of 70·cm at a constant speed of 20·cm·s–1 (Fig.·1B). Thus, for the crab’s eye the stimulus had an apparent size subtending an angle of 4° at its stationary initial position and expanded until covering the entire screen (77° width, 62° height). It should be noted that this definition is somehow arbitrary, because different properly scaled combinations of sizes, speeds and distances of the object can generate identical image expansions (Gabbiani et al., 1999). Thus, for example, a 5·cm object that approaches from 70·cm at a speed of 20·cm·s–1 cannot be distinguished on the bases of its image expansion from an object of 10·cm that approaches from 140·cm at 40·cm·s–1. Despite this uncertainty, the animal would still be able to estimate the time remaining before colliding with the approaching object. Such information can be extracted from the rate of expansion of the image and is independent of the combination of parameters that generated that particular expansion. Indeed, the estimation of the collision time can be obtained by determining the ratio between retinal image size at a given instant and the rate of expansion of the image, provided that the object approaches at a constant velocity (Lee, 1976; Rind and Simmons, 1999). Throughout the experiments expansions were always directly towards the animal. In addition to the black looming stimulus, in some experiments we also used the following stimuli: (i) a white looming stimulus over a black background; (ii) a receding stimulus with an opposite but otherwise similar kinetic to the looming one; (iii) a stimulus that consisted of a black square subtending 17° (6·cm sides), which moved parallel to the animal at a constant speed of approximately 48°·s–1 (18·cm·s–1 on the screen); (iv) a gradual darkening without motion components. This was generated by reducing the light intensity at the screen from 2.1⫻10–2·mW·cm–2 (corresponding to the white background) to 0.03⫻10–2·mW·cm–2 (corresponding to the black looming stimulus at full expansion). The time course of the luminance change approximated that produced by the black looming stimulus. Escape response The locomotor activity of the crab was investigated in a walking simulator device consisting of a floating styrofoam ball that could be freely rotated by the animal from a standing position (Fig.·2). The method is a variation of that previously used to investigate the orientation of walking in insects (e.g. Dahmen, 1980). The crab was attached to a weightless rod THE JOURNAL OF EXPERIMENTAL BIOLOGY 868 D. Oliva, V. Medan and D. Tomsic Yc Xc ϕc Y2 Flexible sheet X2 Y1 X1 Fig.·2. Measurement of the escape response. Locomotor activity was studied in a walking simulator device consisted of a styrofoam ball that could be freely rotated by the animal. The crab was held in position by a weightless rod attached to its carapace that could move freely up and down within a vertical guide located above the crab. Both the rod and the guide sleeve had square cross-sections, which prevented the animal from rotating around its yaw axis. The horizontal position of the floating ball was stabilized by four contact points separated by 90° and provided by two optical mice and two flexible sheets. Locomotion was assessed by recording the rotations of the ball with the two mice according to the method described in the text (see also Fig.·1). through a piece of rubber glued to its dorsal carapace. The rod was introduced inside a metal guide, positioned vertically above the ball, where it could slide up and down with little friction. This allows the animal to feel its own weight and thus to adopt their natural posture while performing on the ball. The rod and the guide both had square sections, which prevented rotational movements and thus opened the visual feedback loop. Because crab eyes possess a panoramic field of view, but the visual sensitivity may be different around the eye (e.g. Sandeman, 1978), opening the feedback loop allowed us to vary the location of the visual input while preventing the complications of the crab responding to the visual consequences of its own actions (Land and Layne, 1995b). On the other hand, crabs have their eyes mounted on top of movable stalks, which they move to stabilize the optic flow that results from its own movements. However, they have never been observed to move the eyes in such a way as to bring the image of a target to bear upon a special part of the retina, i.e. they do not fixate and track objects of interest (Barnes and Nalbach, 1993; Sandeman, 1978). In a series of preliminary experiments we compared the escape response to looming stimuli between crabs with free and immobilized eyestalks, and found no difference in any response parameter. Therefore, there was no need for immobilizing the eyes during behavioral experiments in the present study. The styrofoam ball (16·cm in diameter) was floating within a bowl-shaped container partially filled with water. Horizontal displacements of the ball were prevented by four set points provided by two optical mice and by two flexible sheets located at right angles from each other. The rotation of the ball was recorded by the two mice that have their optical reading systems protected by transparent acetate sheets, which also ensure smooth movements of the ball. Recording and reconstruction of the locomotor pathway During normal walking, crabs may perform translatory as well as rotational movements. On the walking simulator these actions turn into corresponding displacements of the ball beneath the crab. In the case of pure translation, the path of the ball is a straight line whose direction is opposite to that of the crab’s intended locomotion. Pure rotation by the crab causes rotation of the ball about a vertical axis through the crab, again in the opposite direction to the crab’s intention. Combinations of translation and rotation result in circular movements by the ball, where the center of rotation is at a distance from the crab itself. Translatory and rotatory movements were extracted by the method shown in Fig.·2. A system of orthogonal coordinates centered in the crab defined the Yc and Xc axes, which corresponded, respectively, to the anteroposterior and lateromedial axes of the crab. Attempts of the animal to move forward or backward displaced the surface of the sphere beneath the crab along the Yc axis, and this movement was recorded by monitoring Y-axis movements (Y1) of mouse 1. Attempts of the animal to move sideways displaced the surface along the Xc axis, and this movement was recorded by monitoring Y-axis movement of mouse 2 (Y2). Rotational movements (c) were recorded by monitoring the X-axis of both mice. Thus pure forward–backward translatory movements over time t corresponded to ⌬Yc(t)=␣1⌬Y1(t), sideways translatory movements to ⌬Xc(t)=␣2⌬Y2(t), and rotational movements to ⌬c(t)=1⌬X1(t)=2⌬X2(t), where ␣1, ␣2, 1 and 2 are constants that were obtained by calibration of the equipment. Signals from the mice were acquired using the recording facilities of the commercial software generating the visual stimuli (Presentation 5.3, Neurobehavioral Systems Inc., Albany, CA, USA). Mice data were taken at each frame update (16.7·ms), which ensured accurate correspondence between the recorded response times and the stimulus features (size, border speed, etc) at each screen update. Two Presentation programs were run in two separate PCs. PC1, which generated the visual stimuli, was used to record one of the mice, as well as to trigger the recording of the second mouse in PC2 (Fig.·1A). Thus, the program that generated the visual stimulus synchronized the recording of the two mice just before stimulus onset. The data recorded by mice 1 and 2 during a trial generated two Presentation files, which contained a list of the THE JOURNAL OF EXPERIMENTAL BIOLOGY Looming detection in crabs Results The crab response to looming stimuli To analyse the time course of the escape response in Chasmagnathus we began with responses elicited by looming stimuli approaching from the side of the crab, because these escapes are executed in a single direction and do not contain a rotational component (see below) (see also Land and Layne, 1995b). An example of the escape response developed by the crab can be seen in Movie 1 in supplementary material. As A Accumulated distance (cm) Electrophysiology Intracellular recordings from interneurons in the optic lobe were performed in the intact living animal according to methods previously described (Berón de Astrada et al., 2001). Briefly, the crab was firmly held in an adjustable clamp. The eyestalks were cemented to the carapace at an angle of approximately 70° from the horizontal line, which corresponds to their normal position. A tangential cut performed with a sharp scalpel was made to remove a small piece of thin cuticle (about 500·m in diameter) from the tip of the eyestalk without causing damage to the ommatidial area. The crab was positioned in the center of the arrangement of monitors within the Faraday cage. The clamp with the crab was held in position using a magnetic holding device. The glass microelectrode was then positioned and advanced through the opening in the cuticle. Microelectrodes (borosilicate glass; 1.2·mm outer diameter, 0.68·mm inner diameter), were pulled on a BrownFlaming micropipette puller (P-77; Sutter Instrument, Novato, CA, USA) yielding tip resistances of 40–60·M⍀ when filled with 3·mol·l–1 KCl. A bridge balance amplifier was used for intracellular recordings (Axoclamp 2B; Axon Instruments, Union City, CA, USA). The output of the amplifier was monitored on an analogue oscilloscope, digitized at 10·kHz (Digidata 1320; Axon Instruments) and recorded in a computer for subsequent analysis. All intracellular recordings were performed at the membrane resting potential. The monitors located inside the Faraday cage generated a significant level of electrical noise in the recordings, but we were able to prevent the noise in two ways: (i) by placing a wire mesh just in front of each one of the screens, and (ii) by wrapping the headstage, the electroholder and part of the glass electrode with a dense, properly grounded, metal wire mesh. Note that after electrophysiological recordings, the crabs remained healthy and no subsequent behavioral differences were observed with respect to non-treated animals. 100 75 50 25 0 Normalized accumulated distance times associated with each data record and frame update. The files were then combined and analyzed off-line to obtain the profile of the escape response. A recording trial lasted 10·s and, when repeated, trials were recorded at either 1 or 3·min intervals. In all trials the stimulus remained stationary for 30·s at its initial position before starting to increase in size. Behavior was always monitored by visually observing the animal through a small hole in the curtain at the front of the cage. 869 0 1 2 4 6 8 10 8 10 Decelerated escape B 0.8 Escape running 0.6 0.4 Escape start 0.2 0 Still 0 2 4 6 Time (s) Stimulus (3.5 s) Fig.·3. The escape response to looming stimuli. (A) Each trace corresponds to the distance covered by a different animal during 10·s, starting from the beginning of the stimulus presentation at the right side. Different animals run different distances. However, when normalized to the maximum value, the time courses of all responses are remarkably similar (B). The response then can be divided into four distinguishable phases (for further details see the text and Movie 1 in supplementary material). The dotted line signals the time at which the virtual object would collide with the animal. N=18, one trial per crab. shown in Fig.·3A, the same looming stimulus elicits escape responses of different magnitude in different animals (running distances may vary from 20 to 100·cm). Nevertheless, when the individual responses are normalized to the maximal value, their time courses look remarkably similar (Fig.·3B). In all cases four distinguishable response phases can be recognized. First, despite the fact that the stimulus has begun to loom, the crab remains still, indicating that it has not yet perceived the stimulus as a threat. Second, there is a well-defined moment at which the escape run is triggered. Third, from the starting point of the escape until the end of the stimulus expansion, there is a response phase characterized by high-speed running of up to 35·cm·s–1. Fourth, at the end of the stimulus expansion the crab immediately decelerates, in such a way that by the end of the 10·s recording period it is slowly walking or has stopped. On a few occasions, the animals had been walking before the start of image expansion; those trials were not included in the analysis. THE JOURNAL OF EXPERIMENTAL BIOLOGY 870 D. Oliva, V. Medan and D. Tomsic 0.5 30 0.4 1.5 20 0 3.5 2.5 0.3 15 0.2 10 0.1 5 Fig.·4. Threshold of escape response to looming stimuli. Individual responses from different crabs are displayed from the beginning of stimulus expansion up to 0.5·s following the time of virtual collision (same dataset as shown in Fig.·3). The time at which each response was initiated (response latency) was projected onto the curve that describes the angular size of the stimulus, which identifies the apparent stimulus size at the time the crab initiated the escape response. The inset shows at higher magnification the part of the responses corresponding to the time enclosed by the horizontal rectangle. See the text for further details. 0 0 0 1 2 3 4 Time (s) Repeated responses Escape responses to repeated visual stimulation can be affected by habituation (e.g. Tomsic et al., 1998; Tomsic et al., 2003). Therefore, before measuring the crab’s response to repeated presentation of the stimulus approaching from different visual regions (see below), we decided to evaluate the extent to which repetitions of the same looming stimulus affect the performance of the escape response in Chasmagnathus. Fig.·5A shows the mean response distance 100 Mean accumulated distance (cm) Response threshold We defined the time of response initiation as the first point at which the normalized curve of accumulated distance begins to increase (Fig.·4), which corresponds to a movement of approximately 0.01·cm, or less than 0.1% of the accumulated distance for any run (Fig.·4, inset). These latency values of individual responses were then projected to intercept the curve that describes the apparent size of the object (Fig.·4), to determine the angular size reached by the stimulus at the time each escape was initiated. Similarly, we obtained the retinal speed reached by the stimulus at escape initiation by projecting the latency values onto the curve that describes the rate of image expansion (not shown). Analysis of the data in Fig.·4 (same data set of Fig.·3, N=17) revealed that the stimulus used in the present study triggered the escape response at a mean (± s.e.m.) of 2.41±0.07·s following the beginning of its expansion. At that point the stimulus size on the screen was 4.8±0.3·cm and its edges moved at a speed of 2.32±0.4·cm·s–1, corresponding to an apparent size of 13.9±1° and a retinal speed of 14±2°·s–1, respectively. Thus, at the initial response time the apparent size of the stimulus had increased by about 10° (from 4° at its initial stationary size) in about 2.4·s. Note that the object simulated here departed from 70·cm away and travelled at a speed of 20·cm·s–1, which means that it took 3.5·s to virtually collide with the crab. Because the response started 2.4·s after the stimulus began to move, the animals responded approximately 1·s before the collision. We repeated the same experiment at different times of the year and, despite differences in response intensity related to seasonal variations, found an identical response initiation time (mean ± s.e.m.=2.43±0.07·s, N=14). Therefore, the time at which crabs decide to initiate escape to this stimulus appears to be very consistent among different individuals. 1 min stimulus interval A 3.0 80 2.5 60 2.0 1.5 40 1.0 20 0.5 0 0 100 3 min stimulus interval B 3.0 80 2.5 60 2.0 Response latency (s) Stimulus angular size (deg.) 25 Normalized accumulated distance 0.005 1.5 40 1.0 20 Latency Distance 0.5 0 0 0 2 4 6 Trial number 8 10 Fig.·5. Responses to repeated looming stimulation. (A) Repeated presentations of the same looming stimulus at 1·min intervals produce a progressive reduction of the escape distance (open squares, left axis) and an increase in response latency (filled circles, right axis) (N=14 crabs). (B) Repeated stimulation with longer inter-trial intervals (3·min) causes less changes to the escape distance and did not affect the response latency (N=15 crabs). Broken lines indicate the value of the mean response latency at first trial. THE JOURNAL OF EXPERIMENTAL BIOLOGY Looming detection in crabs 871 A 70 cm 60 B C 3 Mean latency (s) 50 Mean distance (cm) Fig.·6. Directional sensitivity of the escape response. The looming stimulus was presented to each animal once in each of the four different visual regions corresponding to the position of the monitors, and the sequence of presentation was varied among animals. (A) Polar plots show the trajectories of the escape responses to the stimulus approaching from each one of the four screens: upper left, stimulus above; upper right, stimulus in front; lower left, stimulus at left side, lower right, stimulus at right side. Black circles denote the direction of escape for each animal. (B) Response distance of the responses shown in A. (C) Latency to initiate the escape of the responses shown in A. Values are mean response scores ± s.e.m.; N=10 crabs, one trial at each stimulus location. 40 30 20 2 1 10 0 0 Above Front (open squares, left axis) run by a group of 14 crabs, upon 10 presentations of the looming stimulus separated by 1·min. The figure also shows the mean response latency (as described above) for the same animals (filled circles, right axis). The result indicates that repeated stimulations caused a progressive reduction in the running distance and an increase in response latency. Given that 1·min is a quite short intertrial interval, the result may have been caused by motor fatigue rather than by a central process of habituation. Consequently, we repeated the experiment with a different group of 15 crabs but using an inter-trial interval of 3·min. The result revealed that despite subtle changes in the running distances across trials (a sensitization effect is apparent at trial 2) there were no differences in the latency of response (Fig.·5B). Therefore, in the latter condition repeated responses to the same stimulus are always launched at approximately the same time. Left Right Above Front Left Right Directional tuning of escape Individual trajectories of escape responses recorded on the walking simulator to the virtual looming stimulus approaching from four different visual regions are shown in Fig.·6. Each animal was presented with one stimulus from each monitor using an inter-trial interval of 3·min and the sequence of presentations was varied among different animals. The crabs escape sideways to the left or right with equal probability when confronted with stimuli in their dorsal visual field, but always run in the opposite direction to an expanding stimulus when it is presented in horizontal directions of view. Escape paths in response to lateral stimuli are longer than those elicited by frontal or dorsal stimuli (Fig.·6B). These differences may reflect variations of resolving power across the visual field (Nalbach and Nalbach, 1987; Sandeman, 1978) or the fact that crabs’ preferred running direction is sideways. For instance, for frontal stimuli we recorded the largest rotational components THE JOURNAL OF EXPERIMENTAL BIOLOGY 872 D. Oliva, V. Medan and D. Tomsic M1 neuron M2 neuron 10 mV Angular size of Mean spike stimulus (deg.) frequency (Hz) Trial 120 120 80 80 40 40 0 0 60 30 0 60 30 0 1 2 4 Time (s) 6 1 2 4 Time (s) 6 Fig.·7. Response of an M1 and an M2 type of movement detector neuron to the looming stimulus appearing from the right visual field. Traces exemplify individual responses from each neuronal type. The time of spike occurrence shown below the traces illustrates the consistency of the response for each neuron to nine presentations of the stimulus, separated by 1·min (the traces correspond to the last trial of these series). Peristimulus time histograms show the mean spike rate obtained from the nine trials. Data are divided into 100-ms bins and are plotted as means ± s.e.m. Angular size of the looming object is given in the lower traces of each panel. Arrowheads mark the beginning of the stimulus expansion; long arrows mark the moment at which the synaptic activity or the spike rate of neurons had clearly increased above resting level. of escape runs, indicating that crabs attempted to rotate in order to run sideways. Response latencies, however, may be determined by the resolving power of the crabs’ eyes: the crabs’ response latency was consistently longer for dorsal, compared with lateral or frontal stimuli (P<0.01, Fig.·6C). Interommatidial angles in the eyes of Chasmagnathus increase towards the dorsal visual field (V.M., unpublished) and a looming stimulus needs to expand further in the dorsal, compared to equatorial, visual field in order to stimulate a similar number of facets. Identification of neurons responsive to looming stimuli Movement detector neurons (MDNs) from the lobula of the crab are easily recognized by their high sensitivity to moving objects in comparison to stationary changes in brightness (Berón de Astrada and Tomsic, 2002; Tomsic et al., 2003). Previous studies distinguished MDNs with dendrites that arborize in a single layer of the lobula from neurons that arborize in two layers (Berón de Astrada and Tomsic, 2002; Sztarker et al., 2005). Based on morphological characterizations and physiological analyses of responses to laterally moving objects, more recent studies revealed the existence of at least four clearly distinguishable subclasses of MDN (Medan et al., 2004) (V.M. and D.T., unpublished). We evaluated the response to the looming stimulus in the four different cell types and found that two of them, which we name M1 and M2 (see below), respond to an expanding image in a robust and reliable way. Representative responses of these two neurons are shown in Fig.·7, together with their consistency in terms of the times of neuronal spikes upon nine presentations of the looming stimulus separated by 1·min (the traces correspond to trial 9 of each experiment). The response in both M1 and M2 neurons consists of a depolarization accompanied by spiking activity that progressively increases as the image of the virtual object grows over the retina of the animal (see also Figs·8, 9). Despite the fact that stimulus repetition appears to reduce the total number of elicited spikes (particularly in M2), and that the occurrence of spikes may slightly vary among trials (likely due to the fact that the animal is alive and hence its internal state is continuously changing), the general response THE JOURNAL OF EXPERIMENTAL BIOLOGY Looming detection in crabs A Flash B C Lateral motion 873 Looming 20 mV M1 1s Angular size of stimulus (deg.) M2 60 30 0 1 2 Time (s) 4 6 Fig.·8. Response of an M1 and an M2 neuron to (A) a flash of light, (B) a laterally moving object and (C) an approaching object. (A) The horizontal open bar below the traces represents 1·s duration of light stimulation (200·mW·m–2 at the crab eye). (B) The black bar represents 1·s motion of a black square object moving laterally to the crab. (C) The curved line represents the time course of expansion of the looming stimulus as described in Fig.·7. Arrows in the traces mark the approximate moment at which the neurons began to respond to the looming stimulus by increasing their synaptic activity or spike rate above resting level. profile of both types of neurons to the looming stimulus is preserved across trials. These profiles can be better appreciated from the peristimulus histograms of Fig.·7 (see also Figs·8, 9 and 11), corresponding to averaged data (± s.e.m.) of the nine repetitions organized into 100·ms bins. The histograms suggest the existence of two peaks in spike rate: a small one that occurs immediately after the start of stimulus movement, and a second that builds up during the approach. Interestingly enough, these two peaks were also observed in the LGMD1-DCMD neurons of the locust when a stimulus that subtends >5° at the eye approaches the eye, and they were taken as an indication that these neurons follow angular acceleration of the image much more closely than angular velocity or angular size of the image (Rind and Simmons, 1992). In Fig.·8, recordings of an M1 and an M2 neuron from different animals illustrate their responses to (A) a flash of light, (B) a black rectangle moved laterally and (C) the looming stimulus. In both types of neurons the response to the pulse of light consists of a discrete IPSP or EPSP (occasionally a single spike), always associated with the onset and the offset of the light, whereas to tangential motion the two neurons respond with a train of spikes riding on top of a large and rather sustained EPSP. The response in both M1 and M2 neurons to the looming stimulus consists of a depolarization accompanied with spiking activity that progressively increases as the image of the virtual object grows over the retina of the animal (see also Fig.·9). Despite these similarities, the two neurons present substantial differences. Type M1 neurons comprise a group of 14 units with a well-documented morphology (Sztarker et al., 2005). Briefly, these neurons are homogeneously distributed across the lobula, where they extend their dendrites tangentially along a single layer, in such a way that each neuron collects information from a different and restricted part of the retinotopic mosaic. Physiological measurements revealed that the neurons have their receptive field oriented toward different parts of the visual space, each neuron encompassing less than 90°. Therefore, although the neuronal assemble allows assessment of visual information from the whole panorama, each element processes information from a restricted part of the animal’s visual field (Medan et al., 2004) (V.M. and D.T., unpublished). These neurons had previously been named monostratified movement detector neurons (MMDNs) (Sztarker et al., 2005) but, in order to separate them from a second group of monostratified neurons described below, we term them here simply M1. By contrast, the group of M2 neurons is formed by a yet-undetermined number of elements, although the similarities in cell morphology observed over several independent intracellular stainings indicate there may possibly be only one unit of this type. This neuron possesses a very large dendritic tree that extends in a single layer all the way through the lobula, thus collecting information from the entire retinotopic mosaic. Physiological measurements revealed that the receptive field of this neuron is extremely large, covering the entire visual space (Medan et al., 2004) (V.M. and D.T., unpublished). We call these neurons monostratified 2 or M2. From electrophysiology, the two neuronal types are readily distinguishable because M1 do not fire spontaneously whereas M2 fires at a constant rate of about 6·Hz. At the end of the stimulus expansion M2 usually stops firing and occasionally shows a clear hyperpolarization that may last for several hundred milliseconds before regaining spontaneous activity (Figs·8, 9). THE JOURNAL OF EXPERIMENTAL BIOLOGY 874 D. Oliva, V. Medan and D. Tomsic M1 neurons M2 neurons 30 mV Angular size Mean spike of stimulus frequency (deg.) (Hz) A 10 mV 60 40 20 0 60 40 20 0 60 30 0 60 30 0 Angular size Mean spike of stimulus frequency (deg.) (Hz) B 60 40 20 0 60 30 0 60 40 20 0 60 30 0 Angular size Mean spike of stimulus frequency (deg.) (Hz) C 60 40 20 0 60 40 20 0 60 30 0 60 30 0 Mean spike frequency (Hz) D 60 40 20 0 60 40 20 0 Mean spike frequency (Hz) E 60 40 20 0 Gradual darkening 0 1 2 3 4 Time (s) 5 6 7 60 40 20 0 0 1 2 3 4 Time (s) 5 6 7 Fig.·9. Response of M1 and M2 neurons to different types of movement. (A–E) Results with (A) the black looming stimulus, (B) the black receding stimulus, (C) the white looming stimulus, (D) the laterally moving stimulus and (E) the gradual darkening. Sample recordings from a single M1 and a single M2 neuron illustrate the type of responses of these neurons to the five different stimuli. Peristimulus time histograms show the mean spike rate recorded from 11 M1 and 13 M2 neurons from different animals (one trial per stimulus per neuron). Data are divided into 100-ms bins and are plotted as means ± s.e.m. The angular size of the looming and receding object is given in the bottom traces of each panel. Arrowheads signal the beginning of the stimulus expansion; black bars represent 1·s motion of a black square object moving laterally to the crab. The darkening bar in E represents a gradual darkening of the screen without motion components. THE JOURNAL OF EXPERIMENTAL BIOLOGY Looming detection in crabs Temporal relation between the neuronal and the behavioral response to the looming stimulus Before a visual interneuron can be considered to be involved in the detection of stimuli that trigger an escape response, it must satisfy two initial criteria: firstly, it must respond to the same stimuli that trigger the escape behavior and secondly, its activity must precede the behavioral response. The M1 and M2 neurons that we recorded from satisfy both of these criteria. 60 Behavior M1 M2 50 50 40 40 30 30 20 20 10 10 Mean spike number 60 Mean distance (cm) Neuronal and behavioral responses to looming, receding and laterally moving stimuli We evaluated the responses of M1 and M2 neurons to visual stimuli consisting of a black looming, a white looming, a black receding, a laterally moving black square, and a motionless darkening of the screen. Recordings were taken from the right lobula, stimuli were presented at the screen located to the right of the crab, and in the case of M1 only neurons with the receptive field oriented towards that side were used. Fig.·9 shows representative responses of one neuron from each type to the five visual stimuli, and averaged data (± s.e.m.) from 11 M1 and 13 M2 neurons organized into 100·ms bins. The black receding stimulus (Fig.·9B) evokes in M1 neurons a small but consistent response at the beginning of the image contraction, which is usually absent in M2 elements. In both neuron types the white looming object (Fig.·9C) elicits a weak response that slightly increases with the approach of the virtual object. Lateral displacements of the black square (Fig.·9D) produce a considerable response, which is often sustained through the motion period. Dimming of the screen without motion components generates a gradual response in M2 but only a sharp response at the time of maximal darkness in M1 neurons (Fig.·9E). The black looming stimulus (Fig.·9A) is the one that generates the strongest responses. This can be appreciated by comparing the mean spike frequency reached in response to the different stimuli (peristimulus histograms in Fig.·9), as well as the total number of spikes elicited by the stimuli (Fig.·10). The stronger responses obtained to the black looming stimulus (A) in comparison with the lateral motion of the square (D) could be attributed to the fact that the number of elementary motion detectors stimulated at the end of the looming expansion is grater than that stimulated by the lateral moving square. However, larger moving squares that the one used in the present study do not necessarily elicit stronger responses (V.M. and D.T., unpublished). More likely then, the strong response to looming stimuli relates to the increase in the velocity of image expansion that, as it was proposed in the locust, may reduce effects of neuronal inhibition (Simmons and Rind, 1992). In order to begin exploring the relation between the activity of M1 and M2 neurons with the escape response, we evaluated the behavioral reactions to the various stimuli we used. Fig.·10 shows that there is good correspondence between the visual stimuli that elicit an escape behavior and those that are effective at exciting the M1 and M2 neurons. The black looming stimulus is the most powerful, while the black receding one is the weakest. 875 0 Gradual darkening 0 A B C D E Fig.·10. Comparison of the behavioral and the neuronal responses to (A) a black approaching object (B) a black receding object, (C) a white approaching object, (D) an object moving laterally, and (E) a gradual darkening of the screen. Behavioral responses are shown as the mean response distances covered during 10·s following the beginning of the stimulus (left axis). Responses of M1 and M2 neurons to the same set of stimuli were assessed by counting the number of elicited spikes during the period of stimulation (right axis). In M2 neurons the spontaneous rate of firing was subtracted from the response. To obtain the behavioral and the electrophysiological data, crabs were presented with only one stimulus of each type separated by 3·min. In both behavioral and electrophysiological experiments the sequence of presentation was varied among animals. Bars represent mean response scores ± s.e.m. Behavior, N=14 crabs; neurons: M1, N=11; M2, N=13. Comparison of the temporal profile of the crab escape response with those of M1 and M2 neurons to the black looming stimulus is shown in Fig.·11. Behavior is shown as the mean running speed from 14 animals (one run per crab), organized into 100·ms bins. Neuronal responses are shown as the mean spike frequency of 19 records obtained from 10 M1 and 18 records from 13 M2 neurons (no more than 2 records per neuron per crab were considered), which are also organized into 100·ms bins. Note that the time axes for the records shown in Figs·7–9 and 11 are different from those in Figs·3 and 4; the start of the looming motion indicated by arrowheads in Fig.·11 corresponds to time zero in Figs·3 and 4. As described above, the escape response starts (dotted line in Fig.·11) approximately 2.4·s after the stimulus begins to move. Clearly, at the moment of escape initiation, both M1 and M2 neurons have significantly increased their firing activity above their resting discharge. However, there is a delay of approximately 120·ms between the responses of MDNs and the behavioral reaction (Tomsic et al., 2003), so that the behaviorally relevant discharge level occurs 120·ms before the first movement of the animal can be detected (see arrows in Fig.·11). The escape speed of crabs increases with the angular size of the stimulus (Fig.·11A), whereby running speed continues to increase up to the moment when the stimulus stops expanding (broken line). At the end of expansion, when the stimulus was moving at angular velocities above 200°·s–1, crabs reached an averaged escape velocity per bin of 24.5·cm·s–1. Interestingly, THE JOURNAL OF EXPERIMENTAL BIOLOGY 876 D. Oliva, V. Medan and D. Tomsic Mean running speed (cm s–1) 30 A Behavior 20 10 0 M1 mean spike frequency (Hz) 80 B 60 M1 40 20 0 M2 mean spike frequency (Hz) 80 C 60 M2 40 20 Angular size of stimulus (deg.) 0 D 80 60 40 20 0 0 Angular velocity (deg. s–1) 250 1 2 3 4 5 6 7 1 2 3 4 Time (s) 5 6 7 E 200 150 100 50 0 0 the run suddenly decelerates almost immediately following the end of expansion. This matching between the dynamic of the approaching image and that of the escape suggests that the response is under feedback control. Discussion The great challenge to investigate the computational and neural processes that underlie the behavioral decision of reacting to looming stimuli arises from the scarcity of experimental models in which both the behavioral and the neuronal responses can be studied in the same animal. In this paper we introduce a new experimental model, which presents some advantages for investigating the processes of looming detection, escape decision and escape control, at Fig.·11. Temporal relationship between the neuronal and the behavioral response to the looming stimulus. Peristimulus time histograms show (A) the mean (± s.e.m.) running speed of the animals and (B,C) the mean (± s.e.m.) spike rate of M1 (B) and M2 (C) neurons, calculated over 100-ms bins and plotted against time during the object approach. (D) Angular size and (E) speed of expansion of the looming object. Arrowheads mark the beginning of the stimulus expansion; the dotted line marks the moment at which the escape behavior was initiated; the broken line indicates the moment when the stimulus reached its maximum expansion and velocity; the vertical solid line marks the point in time at which collision would have occurred; arrows in B and C point to the neuronal activity 120·ms before the first movement of the animals. Behavioral data are from 14 crabs (one trial per crab). Neurophysiological data are from 19 trials recorded from a total of 10 M1 neurons and 18 trials from 13 M2 neurons, each neuron from a different animal (i.e. no more than 2 records per crab were included). both behavioral and neuronal levels. The advantages can be summarized as follows: (i) a robust and reliable response that can be elicited by computer-generated looming stimuli in all tested animals; (ii) the response magnitude, timing and direction are easy to record and to quantify; (iii) the response of identified neurons to looming stimuli can be recorded intracellularly in the intact animal; (iv) the response of these neurons seems to encode properties of the visual stimuli that trigger the escape response. Our results reveal that in many aspects, looming-sensitive neurons of the crab remarkably resemble those studied in the locust (see below), a finding that is relevant to the question of whether analysis of retinal image expansions is performed by similar or different computational principles across species. THE JOURNAL OF EXPERIMENTAL BIOLOGY Looming detection in crabs Reaction to looming stimuli in crabs Semiterrestrial crabs possess a highly developed visual system and display conspicuous visual guided behaviors (e.g. Cannicci et al., 1997; Zeil and Hemmi, 2006). In nature, Chasmagnathus is preyed upon by different species of seabirds (Spivak and Sanchez, 1992), the most important being the gull Larus atlanticus, which is a specialized crab feeder (Escalante, 1966; Copello and Favero, 2001). The strategies used by this gull to approach and capture Chasmagnathus have barely been studied. Yet, they seem to be varied, the most important being walking and surface seizing (Copello and Favero, 2001). Depending on the attack strategy and on the different stages of an attack, visual cues vary widely for the crab prey. How do the animals then detect the danger and elicit the appropriate response faced with such a variety of visual cues? Fiddler crabs appear to employ a multistage predator avoidance strategy depending on the level of risk, whereby this risk may be assessed by different detector systems, sensitive to different aspects of predator-associated visual cues (Hemmi, 2005b). A similar hypothesis has recently been proposed to explain the range of evasive behaviors, from steering to diving, elicited by looming stimuli in the locust (Santer et al., 2006). Parameters of the looming stimuli that determine the escape decision Depending on their velocity, size, distance and movement direction, approaching objects generate images that move and expand over the observer’s retina with different dynamics. Thus, the way in which the image changes contains significant information about object behavior, even though biological constraints may limit access to some of this information (Hemmi and Zeil, 2005). But which one of the various parameters that define the expanding image is used by the animal? Behavioral experiments performed in different species of crabs and in crayfish have suggested different possibilities, including an increase in the apparent size of the stimulus (Glantz, 1974; Nalbach, 1990b), a threshold in retinal speed (Hemmi, 2005b), or a combination of these factors (Land and Layne, 1995a; Hemmi, 2005b). For instance, the critical stimulus parameter to initiate the escape in the crab Heloecius or to trigger the defense reaction in the crayfish is the increase in angular size (Nalbach, 1990b; Glantz, 1974). In Heloecius the apparent angular size of the stimulus had to increase above 5.6° from its initial value (discussed in Hemmi, 2005b) while in the crayfish the required increase was about 8° (Glantz, 1974). In Chasmagnathus, the looming stimulus used in the present study launched the escape response when the image reached an apparent angular size of 13.9° and a retinal speed of 14°·s–1. Therefore, at the response onset the apparent angular size of the stimulus had increased by approximately 10° (from 4° at the initial position up to 13.9° at the time of response onset), which is not far from the values reported in Heloecius and the crayfish. It should be stressed, however, that the value obtained corresponded to the average time at which most Chasmagnathus decided to initiate the escape, and not to the minimum threshold for detecting visual motion stimuli. In fact, 877 our electrophysiological recordings show clearcut neuronal responses when the stimulus subtends less than 4.5° (i.e. an increase of 0.5° from the initial value) and moved at a retinal speed below 1.4°·s–1 (see arrows in Figs·7, 8). When compared with field studies, the mean threshold values found in Chasmagnathus appear to be much higher than those reported for fiddler crabs (Hemmi, 2005b; Land and Layne, 1995a). Several reasons may account for the difference: First, fiddler crabs possess a region of maximal vertical resolution around the eyes’ equator, which is not common to other groups like grapsid crabs (Zeil et al., 1986). Thus, stimuli moving close to the level of the horizon might indeed be more readily perceived in fiddler crabs than in Chasmagnathus. Second, the discrepancy may arise from the fact that the values we report in the present study correspond to the averaged thresholds from several animals, whereas in fiddler crabs the reported values corresponded to the minimum individual threshold detected among many animals. In fact, when looking at individual responses we found escape reactions that were triggered when the stimulus had an apparent angular size of only 5.7° and moved at a retinal speed of 2.3°·s–1. Lower thresholds would have been difficult to obtain in our current experiments since the initial size of the stimulus was already 4°. Interestingly, the lowest behavioral thresholds we observed were from those few animals (hence excluded from the general analysis) that were slowly walking at the time the looming was initiated, which suggests that the locomotion state may have a facilitatory effect on the responsiveness to danger visual stimuli. A third possibility to explain the difference in thresholds between fiddler crabs and Chasmagnathus relates to the fact that crabs display different responses according to their assessment of the risk of predation (Hemmi, 2005a). In fact, crabs respond to a predator in three different stages: freeze, home run and, ultimately, refuge entry. Thus, a stimulus approaching from a long distance, such as those used in field studies with fiddler crabs, initially elicits a startle response. But as the stimulus comes closer (or initiates its approach from a shorter distance, as in our study), the probability and the strength of the escape increase. It has been proposed that the different stages of the escape response are mediated by two distinct detector systems, sensitive to different aspects of predator-associated visual cues (Hemmi, 2005b). Differential activation of these two distinct, but complementary, predator response systems was suggested to explain the discrepancy between the threshold values found in fiddler crabs and in the crab Heloecius (Hemmi, 2005b). This explanation could also account for the discrepancy between the values found in fiddler crabs and Chasmagnathus. To determine which one of the parameters that characterize a visual stimulus is used by the animal to identify it as an impending threat, and then initiate the escape, requires a comprehensive study employing a wide range of visual stimuli. The present study shows that regardless of the differences in response strength in different animals (Figs·3, 4) or in the same animal, depending on the number of exposures (Fig.·5B), the THE JOURNAL OF EXPERIMENTAL BIOLOGY 878 D. Oliva, V. Medan and D. Tomsic time course for the response remains invariant. Provided stimuli are separated by at least 3·min, temporal parameters such as the response latency can thus be assessed by repeatedly recording the responses to diverse looming stimuli in the same animal. Neuronal responses to looming stimuli and the escape response In this study we show that two subclasses of movement detector neurons from the crab’s lobula, here termed M1 and M2, respond to the looming stimulus in a way that closely matches the time course of expansion and, equally important, their activity correlates with the magnitude (speed) of the elicited escape response (Fig.·11). This is particularly clear in the case of M1 neurons, the discharge rate of which correlates with each phase of the behavioral output. During the first part of the stimulus approach M1 is silent and the crab remains still. Then, at a certain point of the expansion the neuron begins to increase its firing rate, and soon afterwards the crab starts to run. The increase in running speed of the crab during the stimulus approach faithfully follows the increment in the firing rate of M1 until the moment of maximum stimulus expansion, when the neuron abruptly stops firing and the animal immediately decelerates its run. However, before the relation of M1 neurons with the escape response can be generalized, more experiments using looming stimuli of different sizes and with different velocities of approach are needed. The directional component of the escape response of crabs is known to be controlled by continuous visual feedback (Land and Layne, 1995a; Land and Layne, 1995b). The close correlation between the time course of image expansion and the speed of running suggests that the velocity of the escape may also be controlled by a visual feedback, which could operate through M1 neurons. However, because we do not know the postsynaptic target of M1 neurons, their involvement in the circuit that commands the escape response to looming stimuli remains speculative. Comparison of the looming sensitive neurons of the crab and the locust The visual nervous system of insects and crustaceans are thought to be homologous (Strausfeld, 2005), and the recent finding of a lobula plate neuropil in Chasmagnathus gave further support to this idea (Sztarker et al., 2005). In the present study we found that the looming-sensitive neurons of the crab resemble those of the locust in many aspects. In both animals these neurons collect visual information from a large portion of the retinotopic mosaic through a large dendritic tree located in the lobula, and their axons project to the midbrain. Functionally, these neurons respond vigorously to the approach of dark objects towards the eye, with a response that continues to increase as the object comes closer, as would occur during imminent collision or during the strike of a predator. In both animals the neurons are excited by translatory movements, their response wanes to a repetitive stimulus and they are almost insensitive to wide field image motion. In addition, they respond more strongly to black than white expanding stimuli or image contraction (e.g. Berón de Astrada and Tomsic, 2002; Medan et al., 2004; Rind, 1987; Rind and Simmons, 1999) (see results in the present paper). In both locust and crabs there are two identified classes of looming-sensitive neurons. Class M1 and class M2 of the crab share features with class LGMD1 and class LGMD2, respectively, of the locust. Like LGMD1, M1 do not fire in the absence of visual stimulation, whereas LGMD2 as M2 both have a significant resting spike discharge. The spontaneous firing of LGMD2 and M2 generates in these neurons a faster discharge rate than in LGMD1 and in M1 during object approach and, unlike in LGMD1 and M1, they often exhibit a hyperpolarization and reduction in spike rate at the end of approach. The response of LGMD1 to approaches of objects that subtend >5° at the eye usually comprise two peaks in the spike rate (Rind and Simmons, 1992), and this feature is also apparent in M1 neurons. During contraction of a dark image both M1 and LGMD1 are often strongly excited for a brief time, but such excitation is not found in M2 and LGMD2. In addition, recordings from M1 and LGMD1 usually show an abundant, sharp postsynaptic activity, which is not common to M2 and LGMD2. To further appreciate the functional analogies between the neurons from the crab and the locust, compare the records of this paper with those previously published (Simmons and Rind, 1997). Despite the likeness in their general morphology and similarity in their functional properties, the looming-sensitive neurons of the crab and the locust differ in some important aspects. In the locust, we know most about the LGMD1 neuron and its involvement in the animal’s escape response. There is only one single bilateral pair of these neurons, each one covering the entire view of the eye ipsilateral to its lobula projections. By contrast, the M1 class of the crab comprises 14 bilateral pairs (Sztarker et al., 2005), with receptive fields that are distributed over the extensive visual field of the crab’s eye. Assuming that the system of M1 neurons of the crab, like the LGMD1 of the locust, participates in the escape behavior to looming stimuli, it is reasonable to speculate about the differences between the two looming-sensitive systems and the characteristics of the behaviors with which they are involved. Tethered flying locusts respond to an approaching object with steering manoeuvres and eventually by switching to gliding, which is thought to be a last-ditch effort to evade a fast aerial predator (Santer et al., 2006). Thus, the gliding response appears to represent a true fixed action pattern that is not influenced by visual feedback. The control of such an all-ornone type of response does not require fine directional adjustments and, therefore, could be achieved by a single pair of neurons such as the LGMD1. In contrast, the response to approaching objects in crabs consists of a run, in which direction and speed are clearly influenced by continuous visual feedback (Land and Layne, 1995b). In the absence of a nearby shelter crabs run on a straight path away from the approaching object, but readily change directions upon changes of its direction of approach (e.g. Nalbach, 1990a; Land and Layne, THE JOURNAL OF EXPERIMENTAL BIOLOGY Looming detection in crabs 1995b). This fine directional tuning might require a system of looming-sensitive neurons with differently oriented receptive fields, i.e. an array such as that provided by the 14 pairs of M1 neurons found in Chasmagnathus. In the locust, the exact mechanism by which the LGMD1 neuron encodes information about looming stimuli remains contentious. Two current models predict how the output firing of the LGMD1 represents a looming stimulus. One hypothesis states that the LGMD1 acts as an angular threshold detector. According to this model, postsynaptic multiplication of excitatory and inhibitory inputs that converge onto the LGMD1 produces a peak that occurs with a fixed delay after the looming object reaches a fixed threshold angular size (Gabbiani et al., 1999; Gabbiani et al., 2002). Accordingly, peak firing occurs before collision (Hatsopoulos et al., 1995; Gabbiani et al., 1999; Gabbiani et al., 2002). Another model suggests that presynaptic inhibition shapes looming responses of the LGMD1 (Rind, 1996), which produces a peak firing rate after the object motion ceases (Rind and Simmons, 1999). Thus, the debate between the two hypotheses mainly concerns whether or not the peak of LGMD1 firing rate is the ‘essential functional variable’ (see Rind and Santer, 2004) that triggers the locust escape. It was shown recently that high-frequency (>150·Hz) LGMD1 spikes (measured at its postsynaptic DCMD neuron) are involved in triggering the glide response, but the analyses could not identify any feature of the LGMD1 response alone that was reliably associated with glides in all trials (Santer et al., 2006). This was because, for a glide to be triggered, the high-frequency spikes must be timed appropriately within the wingbeat cycle to coincide with wing elevation. This means that the locust’s escape behavior can vary in response to the same looming stimulus, so a predator cannot exploit predictability in the locust’s collision avoidance behavior (Santer el al., 2006). The lack of predictability also makes it more complicated to relate a certain threshold of the looming expansion with the actual behavioral output. At variance with the gliding response of the locust, which is measured in terms of the probability of occurrence (Santer et al., 2005; Santer et al., 2006), the escape run of the crab is a graded response, the magnitude of which can be measured in terms of the distance or the speed of the run. The onset of the crab’s escape response occurs much earlier than the peak firing rate of the M1 neurons, but their activity appears to convey information on the speed of the escape run. We thank Angel Vidal for technical assistance and Drs M. Berón de Astrada and J. Sztarker for fruitful discussions and corrections to this manuscript. We also wish to thank two anonymous reviewers for providing valuable comments on an earlier version of the manuscript. This work was supported by doctoral fellowships from the National Research Council of Argentina (CONICET) to D.O. and to V.M., and from the following research grants to D.T.: Universidad de Buenos Aires, grant number X 173; ANPCYT, grant number PICT 12300/02. 879 References Barnes, W. J. P. and Nalbach, H. O. (1993). Eye movements in freely moving crabs: their sensory basis and possible role in flow-field analysis. Comp. Biochem. Physiol. 104A, 675-693. Berón de Astrada, M. and Tomsic, D. (2002). Physiology and morphology of visual movement detector neurons in a crab (Decapoda: Brachyura). J. Comp. Physiol. A 188, 539-551. Berón de Astrada, M., Sztarker, J. and Tomsic, D. (2001). Visual interneurons of the crab Chasmagnathus studied by intracellular recordings in vivo. J. Comp. Physiol. A 187, 37-44. Borst, A. (1991). Fly visual interneurons responsive to image expansion. Zool. Jb. Physiol. 95, 305-313. Borst, A. and Bahde, S. (1988). Spatio-temporal integration of motion – a simple strategy of safe landing in flies. Naturwissenshaften 75, 265-267. Cannicci, S., Ruwa, R. K. and Vannini, M. (1997). Homing experiments in the tree-climbing crab Sesarma leptosoma (Decapoda, Grapsidae). Ethology 103, 935-944. Copello, S. and Favero, M. (2001). Foraging ecology of Olrog’s gull Larus atlanticus in Mar Chiquita lagoon (Buenos Aires, Argentina): are there agerelated differences? Bird Conserv. Int. 11, 175-188. Dahmen, H. J. (1980). A simple apparatus to investigate the orientation of walking insects. Experientia 36, 685-687. Escalante, R. (1966). Notes on the Uruguayan population of Larus Belcheri. Condor 68, 507-510. Evans, C. S., Macedonia, J. M. and Marler, P. (1993). Effect of apparent size and speed on the response of chickens, Gallus gallus, to computer-generated simulations of aerial predators. Anim. Behav. 46, 111. Gabbiani, F., Krapp, H. G. and Laurent, G. (1999). Computation of object approach by a wide-field, motion-sensitive neuron. J. Neurosci. 19, 11221141. Gabbiani, F., Krapp, H. G., Koch, C. and Laurent, G. (2002). Multiplicative computation in a visual neuron sensitive to looming. Nature 420, 320-324. Gallagher, S. P. and Northmore, D. P. (2006). Responses of the teleostean nucleus isthmi to looming objects and other moving stimuli. Vis. Neurosci. 23, 209-219. Glantz, R. M. (1974). Defense reflex and motion detector responsiveness to approaching targets: the motion detector trigger to the defense reflex pathway. J. Comp. Physiol. 95, 297-314. Gray, J. R. (2005). Habituated visual neurons in locusts remain sensitive to novel looming objects. J. Exp. Biol. 208, 2515-2532. Gray, J. R., Lee, J. K. and Robertson, R. M. (2001). Activity of descending contralateral movement detector neurons and collision avoidance behavior in response to head-on visual stimuli in locust. J. Comp. Physiol. A 187, 115129. Hatsopoulus, N., Gabbiani, F. and Laurent, G. (1995). Elementary computation of object approach by a wide-field visual neuron. Science 270, 1000-1003. Hemmi, J. M. (2005a). Predator avoidance in fiddler crabs: 1. Escape decisions in relation to the risk of predation. Anim. Behav. 69, 603-614. Hemmi, J. M. (2005b). Predatory avoidance in fiddler crab: 2. The visual cues. Anim. Behav. 69, 615-625. Hemmi, J. M. and Zeil, J. (2005). Animals as prey: perceptual limitations and behavioral options. Mar. Ecol. Prog. Ser. 287, 274-278. Kramer, D. L. and Bonenfant, M. (1997). Direction of predator approach and the decision to flee to a refuge. Anim. Behav. 54, 289-295. Jablonski, P. G. and Strausfeld, N. J. (2000). Exploitation of an ancient escape circuit by an avian predator: prey sensitivity to model predator display in the field. Brain Behav. Evol. 56, 94-106. Jennions, M. D., Backwell, P. R., Murai, M. and Christy, J. H. (2003). Hiding behavior in fiddler crabs: how long should prey hide in response to a potential predator? Anim. Behav. 66, 251-257. Johnson, A. P., Horseman, B. G., Macauley, M. W. and Barnes, W. J. (2002). PC-based visual stimuli for behavioural and electrophysiological studies of optic flow field detection. J. Neurosci. Methods 114, 51-61. Land, M. F. and Layne, J. (1995a). The visual control of behaviour in fiddler crabs. I. Resolution, thresholds and the role of the horizon. J. Comp. Physiol. A 177, 81-90. Land, M. F. and Layne, J. (1995b). The visual control of behavior in fiddler crabs. II. Tracking control systems in courtship and defense. J. Comp. Physiol. A 177, 91-1003. Layne, J., Wicklein, M., Dodge, F. A. and Barlow, R. B. (1997). Prediction THE JOURNAL OF EXPERIMENTAL BIOLOGY 880 D. Oliva, V. Medan and D. Tomsic of maximum allowable retinal slip speed in the fiddler crab, Uca pugilator. Biol. Bull. 193, 202-203. Lee, D. N. (1976). A theory of visual control of braking based on information about time-to-collision. Perception 5, 437-459. Lee, D. N. and Reddish, P. E. (1981). Plummeting gannets: a paradigm of ecolological optics. Nature 293, 293-294. Maier, J. X., Neuhoff, J. G., Logothetis, N. K. and Ghazanfar, A. A. (2004). Multisensory integration of looming signals by rhesus monkeys. Neuron 43, 177-181. Medan, V., Oliva, D. and Tomsic, D. (2004). Preferences for direction of movement on visual neurons of a crab. The 7th Congress of the International Society for Neuroethology. Abstract book p. 123, P0142.Nyborg, Nyborg, Denmark. Nalbach, H. O. (1990a). Discontinuous turning reaction during escape in soldier crabs. J. Exp. Biol. 148, 483-487. Nalbach, H. O. (1990b). Visually elicited escape in crabs. In Frontiers in Crustacean Neurobiology (ed. K. Wiese, W. D. Krent, J. Tautz, H. Reichert and B. Mulloney), pp. 165-172. Basel: Birkhauser Verlag. Nalbach, H. O. and Nalbach, G. (1987). Distribution of optokinetic sensitivity over the eyes of crabs: its relation to habitat and possible role in flow-field analysis. J. Comp. Physiol. A 160, 127-135. Regan, D. and Hamstra, S. J. (1993). Dissociation of discrimination thresholds for time to contact and for rate of angular expansion. Vision Res. 33, 447-462. Rind, F. C. (1987). Non-directional, movement sensitive neurones of the locust optic lobe. J. Comp. Physiol. A 161, 477-494. Rind, F. C. (1996). Intracellular characterization of neurons in the locust brain signaling impending collisions. J. Neurophysiol. 75, 986-995. Rind, F. C. and Santer, R. D. (2004). Collision avoidance and a looming sensitive neuron: size matters but biggest is not necessarily best. Proc. Biol. Sci. 271, 27-29. Rind, F. C. and Simmons, P. J. (1992). Orthopteran DCMD neurons: a reevaluation of responses to moving objects. I. Selective responses to approaching objects. J. Neurophysiol. 68, 1654-1666. Rind, F. C. and Simmons, P. J. (1999). Seeing what is coming: building collision-sensitive neurons. Trends Neurosci. 22, 215-220. Sandeman, D. C. (1978). Regionalization in the eye of the crab Leptograpsus variegatus: eye movements evoked by a target moving in different parts of the visual field. J. Comp. Physiol. 123, 299-306. Santer, R. D., Simmons, P. J. and Rind, F. C. (2005). Gliding behavior elicited by lateral looming stimuli in flying locust. J. Comp. Physiol. A 191, 61-73. Santer, R. D., Rind, F. C., Stafford, R. and Simmons, P. J. (2006). The role of an identified looming-sensitive neuron in triggering a flying locust’s escape. J. Neurophysiol. 95, 3391-3400. Simmons, P. J. and Rind, F. C. (1992). Orthopteran DCMD neurons: a reevaluation of responses to moving objects. II. Critical cues for detecting approaching objects. J. Neurophysiol. 68, 1667-1681. Simmons, P. J. and Rind, F. C. (1997). Responses to object approach by a wide field visual neurone, the LGMD2 of the locust: characterization and image cues. J. Comp. Physiol. A 180, 203-214. Strausfeld, N. J. (2005). The evolution of crustacean and insect optic lobes and the origins of chiasmata. Arth. Struct. Dev. 34, 235-256. Spivak, E. D. and Sanchez, N. (1992). Prey selection by Larus belcheri atlanticus in Mar Chiquita lagoon, Buenos Aires, Argentina: a possible explanation for its discontinuous distribution. Rev. Chil. Hist. Nat. 65, 209220. Sztarker, J. and Tomsic, D. (2004). Binocular visual integration in the crustacean nervous system. J. Comp. Physiol. A 190, 951-962. Sztarker, J., Strausfeld, N. J. and Tomsic, D. (2005). Organization of the optic lobes that support motion detection in a semiterrestrial crab. J. Comp. Neurol. 493, 396-412. Tammero, L. F. and Dickinson, M. H. (2002). Collision-avoidance and landing responses are mediated by separate pathways in the fruit fly, Drosophila melanogaster. J. Exp. Biol. 2005, 2785-2798. Tomsic, D., Pedreira, M. E., Romano, A., Hermite, G. and Maldonado, H. (1998). Context-US association as a determinant of long-term habituation in the crab Chasmagnathus. Anim. Learn. Behav. 26, 196-209. Tomsic, D., Berón de Astrada, M. and Sztarker, J. (2003). Identification of individual neurons reflecting short- and long-term visual memory in an arthropod. J. Neurosci. 23, 8539-8546. Wang, Y. C. and Frost, B. J. (1992). ‘Time to collision’ is signalled by neurons in the nucleus rotundus in pigeons. Nature 365, 236-238. Wicklein, M. and Strausfeld, N. J. (2000). Organization and significance of neurons that detect change of visual depth in the hawk moth Manduca sexta. J. Comp. Neurol. 424, 356-376. Wu, L. Q., Niu, Y. Q., Yang, J. and Wang, S. R. (2005). Tectal neurons signal impending collision of looming objects in the pigeon. Eur. J. Neurosci. 22, 2325-2331. Yamamoto, K., Nakata, M. and Nakagawa, H. (2003). Input and output characteristics of collision avoidance behavior in the frog Rana catesbeiana. Brain Behav. Evol. 62, 201-211. Zeil, J. and Hemmi, J. M. (2006). The visual ecology of fiddler crabs. J. Comp. Physiol. A 192, 1-25. Zeil, J., Nalbach, G. and Nalbach, H. O. (1986). Eyes, eye stalks and the visual world of semi-terrestrial crabs. J. Comp. Physiol. A 159, 801-811. THE JOURNAL OF EXPERIMENTAL BIOLOGY