Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Molecular neuroscience wikipedia , lookup
Nonsynaptic plasticity wikipedia , lookup
Artificial neural network wikipedia , lookup
Axon guidance wikipedia , lookup
Neural engineering wikipedia , lookup
Neural modeling fields wikipedia , lookup
Holonomic brain theory wikipedia , lookup
Single-unit recording wikipedia , lookup
Clinical neurochemistry wikipedia , lookup
Multielectrode array wikipedia , lookup
Neuroesthetics wikipedia , lookup
Metastability in the brain wikipedia , lookup
Neuroethology wikipedia , lookup
Neural oscillation wikipedia , lookup
Stimulus (physiology) wikipedia , lookup
Recurrent neural network wikipedia , lookup
Mirror neuron wikipedia , lookup
Neuroanatomy wikipedia , lookup
C1 and P1 (neuroscience) wikipedia , lookup
Caridoid escape reaction wikipedia , lookup
Neural correlates of consciousness wikipedia , lookup
Neuropsychopharmacology wikipedia , lookup
Development of the nervous system wikipedia , lookup
Circumventricular organs wikipedia , lookup
Biological neuron model wikipedia , lookup
Optogenetics wikipedia , lookup
Types of artificial neural networks wikipedia , lookup
Pre-Bötzinger complex wikipedia , lookup
Central pattern generator wikipedia , lookup
Premovement neuronal activity wikipedia , lookup
Convolutional neural network wikipedia , lookup
Channelrhodopsin wikipedia , lookup
Neural coding wikipedia , lookup
Synaptic gating wikipedia , lookup
Superior colliculus wikipedia , lookup
Nervous system network models wikipedia , lookup
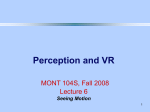
Biological Cybernetics 77, 41–47 (1997) Biological Cybernetics c Springer-Verlag 1997 Coarse coding: applications to the visual system of salamanders Christian W. Eurich1,2 , Helmut Schwegler2 , Richard Woesler2 1 2 The University of Chicago, Department of Neurology, MC 2030, 5841 South Maryland Avenue, Chicago, IL 60637, USA Institut für Theoretische Neurophysik, Universität Bremen, D-28334 Bremen, Germany Received: 7 January 1996 / Accepted: 16 April 1997 Abstract. In a previous study, we calculated the resolution obtained by a population of overlapping receptive fields, assuming a coarse coding mechanism. The results, which favor large receptive fields, are applied to the visual system of tongue-projecting salamanders. An analytical calculation gives the number of neurons necessary to determine the direction of their prey. Direction localization and distance determination are studied in neural network simulations of the orienting movement and the tongue projection, respectively. In all cases, large receptive fields are found to be essential to yield a high sensory resolution. The results are in good agreement with anatomical, electrophysiological and behavioral data. 1 Introduction Many species are capable of highly precise object localization (Roth 1987; Konishi 1993; Dinse et al. 1995) even though the mesencephalic or telencephalic neurons involved in the sensory information processing have remarkably large, overlapping receptive fields (Wiggers et al. 1995a, Gaillard 1985; Knudsen and Konishi 1978; Dinse et al. 1995). In a recent paper (Eurich and Schwegler 1997) we considered a coarse coding mechanism for the representation of the position of a single object in the nervous system in order to account for these observations. In the coarse coding scheme (Hinton et al. 1986), the position of an object is encoded by a population of binary neurons with overlapping receptive fields. In calculating the resolution obtained by such a neuron population, we came to the encouraging result that large receptive fields are advantageous for the encoding of stimulus position, indicating that they can indeed play a role in sensory object localization. In the following, the results derived in Eurich and Schwegler (1997) are applied to the visual system of tongueprojecting salamanders (Bolitoglossini) using analytical calculations and neural network implementations. In Sect. 2, the resolution in direction determination is calculated analytically using empirical data about the poCorrespondence to: Christian Eurich, Universität Bremen, Institut für Theoretische Physik, NW 1, Postfach 330 440, D-28334 Bremen, Germany (Fax: +49 421 218 4869, e-mail: [email protected]) sitions and sizes of receptive fields of neurons in the optic tectum of the tongue-projecting salamander Hydromantes italicus. In Sect. 3, the resolving capability of large receptive fields for direction determination is tested with a neural network model called Simulander I which tracks prey with head movements. Since the model has been described in detail elsewhere (Eurich et al. 1995), it is evaluated only with respect to its coarse coding properties. In Sect. 4, a coarse coding scheme for depth perception is developed comprised of large, overlapping three-dimensional receptive fields in the binocular visual field. The scheme is implemented in Simulander II, which is a neural network model for the control of the projectile tongue of salamanders. The results are discussed in Sect. 5, where we also address the question of the coding and decoding of information in the nervous system and the problem of relating special tasks to certain neurons in distributed information-processing systems. 2 Coarse coding of object direction in the optic tectum of salamanders The optic tectum is considered to be the main brain center for visual information processing in amphibians. In tongueprojecting salamanders, each tectum hemisphere receives direct input from both retinae (Rettig and Roth 1986). Three pathways extend from the optic tectum to the brainstem and spinal cord, where efferent tectal neurons innervate the motor nuclei of the muscles involved in the control of the projectile tongue (Roth and Wake 1985; Dicke and Roth 1994). The fast reaction of Bolitoglossini and their high success rates in catching small and fast prey may be due partly to a fast connection from the retinae to the brainstem (retinal ganglion cell – tectum neuron – motor neuron) with only two synapses in between (Matsushima and Roth 1990). Here we are interested in the properties of the tectal neurons. Cell counts reveal that in some salamander species there are as few as about 1000 tectal neurons descending to the brainstem and spinal cord in each brain hemisphere (U. Dicke, personal communication). These neurons must convey the information about the position of a prey in the visual field. 42 100 a 80 1 1000 (deg) 60 900 40 20 800 0 700 -20 -40 -150 -100 -50 0 50 100 500 400 b 0.06 0.05 w( ) 2 600 150 (deg) -150 -100 -50 0 50 100 150 0.04 0.03 Fig. 2. Angular resolution per neuron, N αe , as a function of the horizontal angle, ϕ̃0 , on the horizontal median (ϑ̃0 ≡ 0). Curve 1, result for a population of receptive fields all having the same angular size %. Curve 2, result for the same population if the size distribution is taken into account 0.02 0.01 0.0 0 20 40 60 80 100 120 140 160 180 2 (deg) Fig. 1a,b. Properties of tectal neurons in Hydromates italicus. a Distribution of receptive field centers in the visual field. Coordinates (ϕ̃, ϑ̃) = (0, 0) correspond to the center of the visual field. b Distribution of receptive field sizes. Data from Wiggers (1991) tion (2) is then replaced by Le (x0 ; w) = Figure 1a shows the distribution of receptive field centers in the visual field for the tongue-projecting salamander Hydromantes italicus. Angular coordinates ϑ̃, ϕ̃ are chosen so that the point (ϑ̃, ϕ̃) = (0, 0) corresponds to the center of the visual field. All data have been doubled by mirroring at the ϑ̃ axis in order to make the problem symmetric for calculations. Typically, the receptive field density is high in the center of the visual field and decreases as a function of the mediolateral and dorsoventral angles. Figure 1b shows the distribution of receptive field diameters. The mean diameter is 40.6◦ ± 39.9◦ , and there are large receptive fields measuring 180◦ in diameter, i.e., they occupy half of the surrounding. The mean diameter shows a tendency to increase with ϕ̃ (data not shown). Large receptive fields exist only in the lateral visual field, which is a natural consequence of binocularity: a monocular visual field does not extend over 180◦ around the center of the visual field. In order to calculate the accuracy of direction localization we follow the considerations derived in Eurich and Schwegler (1997). The sensory space for direction determination is 2 . For a population of receptive idealized to the 2-sphere, SR fields with mean angular diameter 2%, the angular resolution 2 for the direction e is given by αe (x0 ; %) at x0 ∈ SR αe (x0 ; %) = 1 RLe (x0 ; %) (1) where Le (x0 ; %) is the corresponding density of receptive field boundaries. Le (x0 ; %) is obtained by integrating the den2 ), over all points consity of receptive fields, σ(x) (x ∈ SR tributing with a receptive field boundary at x0 : Z2π Le (x0 ; %) = R sin % σ(ϑ(β), ϕ(β))| cos β| dβ (2) 0 2 ; β: angle parameterizing (ϑ, ϕ: polar coordinates on SR the integration path; R sin %| cos β|: weighting factor which takes into account the local geometry of the integration path). In a more general case, instead of the mean receptive field diameter 2% a receptive field size distribution w(%|x) 2 . Equacan be considered which is a function of x ∈ SR Zπ Z2π R sin % σ(ϑ(β), ϕ(β)) 0 0 ×w(%|(ϑ(β), ϕ(β)))| cos β| dβd% (3) The resolution has been shown to be inversely proportional to the number N of neurons. The angular variables ϑ̃, ϕ̃ introduced above can be calculated from polar coordinates according to the formulae π ϑ̃ = − ϑ , ϑ ∈ [0; π] 2 π − ϕ, ϕ ∈ [0; 32 π] (4) ϕ̃ = 2 2π + π2 − ϕ , ϕ ∈ [ 32 π; 2π] For the following calculations, a subset of the receptive fields shown in Fig. 1 is chosen whose properties have been empirically determined with appropriate accuracy. The mean diameter of the receptive fields in this subset is 2% = 35.9◦ . In the first step, the empirical distribution of receptive fields in the visual field (see Fig. 1a) is considered while all receptive fields are assumed to have the mean diameter, 2%. A method for obtaining a continuous density of receptive fields, σ(ϑ, ϕ), from a finite sample of receptive field positions has been described in Eurich and Schwegler (1997, appendix A). Basically, each receptive field center is 2 ; the functions are replaced by a Gaussian function on SR summed, and the result is normalized and multiplied by the number of receptive fields, N . With σ(ϑ, ϕ) given, (2) can 2 and be evaluated numerically for an arbitrary point x0 ∈ SR direction e, and (1) yields the corresponding angular resolution. Curve 1 in Fig. 2 shows the angular resolution per neuron, N αe (x0 ; %), as a function of the horizontal angle ϕ̃0 for points x0 on the horizontal median (ϑ̃0 ≡ 0); e is the horizontal direction. As expected, the resolution reaches its optimum in the middle of the visual field. The corresponding value is ≈ 385◦ per neuron, i.e., with N neurons an angular resolution of about 385◦ /N is achieved. In the second step, the receptive field size distribution (Fig. 1b) is also taken into account. In addition, we allow this distribution to be dependent on the position in the visual field: the mean receptive field diameter increases with |ϕ̃| because more large receptive field neurons are found laterally 43 than centrally. Since the available empirical data are not sufficient to infer the function w(%|(ϑ, ϕ)) directly, additional assumptions for the distribution are necessary. The construction of an appropriate function w(%|(ϑ, ϕ)) is described in the Appendix. w(%|(ϑ, ϕ)) is inserted into (3); again the density of receptive field boundaries can be evaluated numerically 2 and e, and the angular resolution is for arbitrary x0 ∈ SR given by (1). Curve 2 of Fig. 2 shows the angular resolution per neuron on the horizontal median as a function of ϕ̃0 (as before, e is the horizontal direction). The calculations reveal the following result: the existence of large receptive fields in the periphery of the visual field leads to a lateral increase in resolution compared with the situation of curve 1, where all receptive fields are assumed to have the same size. These findings suggest that the large receptive field neurons that are found in urodeles as well as in anurans (Grüsser-Cornehls and Himstedt 1976; Roth and Himstedt 1978; Grüsser-Cornehls 1984) contribute to the localization of small objects such as prey and are no mere ‘predator detectors’ signaling the emergence of large objects somewhere in the visual field (e.g., Ewert 1984). Curve 2 also shows a slight decrease in the center which may be due to the animal’s snout hiding a part of the visual field. However, the finer features of the resolution curve are not considered to be significant, since predictions of the angular resolution to an accuracy of several degrees would require a much larger set of empirical data. Finally, the number of neurons necessary to yield the angular resolution observed in behavioral experiments can be estimated. We assume that the salamander can localize a 0.05-cm-sized prey at the distance of the maximal protraction length of the tongue, which is 5 cm in Hydromantes italicus (Roth 1976; Wiggers 1991). This corresponds to an angular resolution of 0.57◦ . Curve 2 of Fig. 2 yields an angular resolution per neuron of about 450◦ at ϕ̃0 = 0. Thus, the necessary number of neurons is N ≈ 450/0.57 ≈ 790. This is in good agreement with the empirically estimated number of 2 000 descending neurons in both brain hemispheres. The result can be compared with the performance of the local coding scheme in which the sensory space is divided into small receptive fields whose sizes correspond to the sensory resolution; the firing of a single neuron then indicates the position of an object. Assuming the visual resolution of 0.57◦ , about 162 000 neurons would be necessary to cover the visual field! The estimated small number of receptive fields in the coarse coding scheme and the presence of descending neurons with large receptive fields in the optic tectum suggest that a coarse coding mechanism might indeed be reponsible for conveying the information on prey position from the midbrain to the brainstem and spinal cord. 3 Comparison with the performance of Simulander I In catching prey, tongue-projecting salamanders exhibit a ‘sit-and-wait’ (or ambush) strategy. Their first visible reaction to a small object is a turning movement of the head, by which the object is centered in the visual field. The turning movement, also called the orienting movement, requires an appropriate direction localization. Simulander I is a neural network model for the orienting movement which incorporates electrophysiological, neuroanatomical and behavioral empirical data (Eurich et al. 1995; Wiggers et al. 1995b). The network has a feedforward topology and consists of three layers of 100 neurons each. The input layer of the network represents a population of tectal neurons whose receptive fields have the actual properties shown in Fig. 1. Two hidden layers represent populations of excitatory and inhibitory neurons in the brainstem and spinal cord. The output consists of contractions of two pairs of antagonistic neck muscles by which the salamander moves its head in order to track the prey. In this way, the performance of the network in direction determination can be judged by the accuracy of the motor behavior. The network is prewired according to the topology of tectofugal connections (Dicke and Roth 1994); the strengths of the couplings, however, remain to be determined. They are adapted in a training procedure which is not considered to be biologically motivated but which is a mere optimization strategy searching for optima of performance in weight space. We have found that evolution strategies (Rechenberg 1973; Bäck et al. 1991) yield good results. After the training, Simulander I is capable of centering a model prey, which moves irregularly inside a threedimensional terrarium, in about 92% of the simulation time. The results show that the necessary angular resolution is achieved with only 100 tectum neurons, which confirms our contention in the previous section that high resolution can be attained through neurons with large receptive fields. Moreover, from these simulations it becomes clear that the decoding of information about prey position in the form of motor commands requires a number of neurons which does not significantly exceed the number of the encoding neurons. 4 Coarse coding of depth by binocular neurons and the network Simulander II Depth perception in urodeles and anurans is mainly due to the evaluation of binocular disparity, whereas mechanisms such as accommodation, vergence, and motion parallax are either absent or play only a minor role (e.g., Ingle 1976; Collett 1977; Roth 1987). In tongue-projecting salamanders, binocular neurons in the rostral optic tectum receive direct input from both retinae; some of them project to the brainstem and spinal cord and activate motor networks responsible for the control of the projectile tongue. A binocular receptive field is defined as the overlap of the monocular receptive fields of a binocular neuron. A suitable object in this region of the visual field elicits a strong reaction in the neuron. From the size distribution of monocular fields (Fig. 1b) it becomes clear that binocular receptive fields also tend to be large. The question arises under these circumstances as to whether an exact distance determination can be achieved at all. Figure 3 shows the two-dimensional projections of three typical binocular receptive fields; they occupy a high percentage of the binocular visual field. A discrimination of small regions of space is nevertheless possible with an ensemble coding. This becomes clear from the following qualitative example. Consider the small rhombus V in Fig. 3. An 44 Tectum opticum 144 tectum neurons V Medulla oblongata / Medulla spinalis 50% 1 12 interneurons 100% 50% 12 motor neurons 2 3 100% Muscles SAR1 RCP Fig. 3. An example of the discrimination of a small region of space, V , with large binocular receptive fields (dark grey). V is characterized by the fact that it lies within receptive field 1 but not within receptive fields 2 and 3. The light grey shading indicates the binocular visual field 1 O 1 I0 Is I excitatory parts object in the visual field is positioned within V if and only if the neuron which corresponds to receptive field 1 fires, but the neurons which correspond to receptive fields 2 and 3 do not fire. It follows that a non-firing neuron conveys as much information as a firing one. From these considerations depth perception with large receptive fields seems to be possible. In the Simulander II model, information about the distance of a prey as evaluated by binocular neurons is translated into commands for the control of the projectile tongue. The Simulander II network is shown in Fig. 4. The input layer consists of 144 binocular tectum neurons. The positions and sizes of their receptive fields are adopted from electrophysiological measurements in Hydromantes italicus (Wiggers 1991). There are two more layers in the network which are totally connected: an inhibitory interneuron layer and an excitatory motor neuron layer. These model neuron populations in the brainstem and spinal cord which form the motor nuclei of the muscles of the projectile tongue. The layers consist of 12 neurons each which are modeled with a nonlinear (sigmoid) activation function. Each tectum neuron projects to 50% of both the interneurons and the motor neurons. There are no connections within the neural layers; the network has a feedforward structure. The exact number of neurons does not play a role and has merely been chosen so as to yield a convenient connection structure which can be easily evaluated numerically. The neuron layers have a symmetry resembling the left-right symmetry of the brain in order to reduce the number of weights, i.e., the number of free parameters. The motor neurons innervate the two main muscles controlling the tongue: The subarcualis rectus 1 (SAR1) whose contraction leads to the protraction of the tongue, and the rectus cervicis profundus (RCP) responsible for tongue retraction. Actually, there are several more muscles involved, including some by which lateral protractions are achieved (Roth 1987). Here we confine ourselves to central shots assuming an appropriate head position which can be thought of as the result of the action of the Simulander I network. Empirical data show that both muscles are activated at roughly Rectus cervicis profundus Subarcualis rectus 1 O I0 I inhibitory parts Fig. 4. The Simulander II network. Insets under the muscles boxes show the muscular activation functions, i.e., muscle contraction, O, as a function of the input, I, which is a weighted sum of the motor neurons’ firing rates. In the simulations, I0 = 1.5 and Is = 12. RCP, rectus cervicis profundus; SAR1, subarcualis rectus 1 the same time, and the protraction takes place on a short time scale of 8–10 ms. The SAR1 has an all-or-nothing characteristic whereas the RCP shows a smooth contraction strength as a function of neural input (Roth 1987). The activity of the RCP thus determines the protraction length: minimal RCP contraction corresponds to maximal protrusion (approximately 5 cm) and vice versa. In the model, the activation of both muscles, I, is given by the weighted sum of the motor neuron outputs: I= 12 X w i xi (5) i=1 (wi : neuromuscular synapse of motor neuron i; xi : firing rate of motor neuron i). According to the RCP and SAR1 characteristics, the muscle contractions O(I) are given by the functions shown in the insets in Fig. 4. The relation between the contraction of the RCP and the protraction length of the tongue is assumed to be linear. As in the case of the Simulander I model, the network weights are trained with an evolution strategy. A stimulus with a radius of 0.3 cm is presented near the center of the visual field at different distances within reach of the tongue. The fitness function is defined as the square deviation between the desired and actual contraction of the RCP, summed over all stimulus presentations. Results are shown in Fig. 5. Three different network performances are plotted as a function of stimulus distance, y. Each point is a mean value calculated from the network reactions to 100 slightly different object positions at the same distance. The vertical line designates the reach of the projectile tongue, ymax . Figure 5a gives the relative frequency of correct reactions, where a correct reaction is defined to be a shot of the tongue if the prey is within its reach, and relative frequency of correct reactions 45 1.0 0.8 0.6 0.4 a 0.2 0.0 success rate 1.0 0.8 0.6 0.4 b 0.2 0.0 0.5 mean deviation (cm) iological studies yield the resolution necessary to catch a central prey; a simple motor scheme results in success rates between 80% and 100%. Since the resolution is inversely proportional to the number of encoding neurons, even higher resolutions can be achieved with a modest additional number of neurons. The network can easily be extended to include lateral shots of the tongue. The large binocular receptive fields are expected to yield a good resolution in the lateral binocular visual field also. 0.4 0.3 0.2 c 0.1 0.0 0 2 4 ymax6 8 10 12 14 y (cm) Fig. 5a–c. Performance of the Simulander II network after training as a function of prey distance, y. The vertical line represents the reach of the projectile tongue, ymax . a The relative frequency of correct reactions. b The relative frequency of successful shots at prey within reach of the tongue. c The mean deviation between the tip of the tongue and the center of the prey for prey within reach of the tongue no reaction for prey which is too far away. For y < ymax , the Simulander exhibits a tongue protraction in almost 100% of the cases. In the region immediately beyond ymax , however, the performance is inaccurate: although the object is out of reach, a reaction frequently takes place. The behavior of living salamanders at the sight of prey just outside their reach has not been studied. They may make errors in this case, just as the model predicts. For y > 7 cm, the network shows no reaction – as should be the case. This feature is an immediate consequence of the shape of the binocular receptive fields and the topology of the network: an object which is far away elicits a reaction in many tectum neurons. This leads to high activity in the interneuron layer which causes inhibition of the motor neurons and thus suppression of muscle activity. The missing reaction to distant prey is a generalization property of the network, because object positions outside the reach of the tongue are not contained in the training set. Figure 5b shows the relative frequency of events in which a prey at distance y < ymax is caught. Apart from a small region at ymax , the results range between 80% and 100%. Figure 5c represents the mean deviation between the tip of the tongue and the center of the prey. It lies between 0.1 cm and 0.2 cm in most cases. For small values of y, however, the deviation is greater. The high success rates in this region indicate that the tongue overshoots if the prey is close. Again, this is a result which could be tested with a high-speed camera in a behavioral experiment. The network simulation shows that fewer than 150 binocular tectum neurons with the properties found in electrophys- 5 Discussion Both in analytical calculations and in neural network simulations the coarse coding mechanism shows good performance in resolving the position of a single object in twoand three-dimensional sensory space. We suggest that coarse coding plays an important role, especially in situations where a clearly defined, single stimulus has to be localized. This seems to be true for prey capture by salamanders, where an attention mechanism is at work, selecting and defining a single target: salamanders track a single prey even if several stimuli are present. A second example is sound localization by barn owls (Tyto alba), which have an auditory map in their midbrain auditory area, the nucleus mesencephalicus lateralis dorsalis. The map consists of large, overlapping receptive fields (Knudsen and Konishi 1978; Konishi 1993). Barn owls hunting in darkness are able to recognize and isolate noise patterns originating from prey, and their success depends on their ability to localize prey from such auditory signals alone. Sound localization in barn owls has also been described with a neural network model (Uhlenwinkel et al. 1994). Finally, in the somatosensory systems of rats and humans, where large receptive fields can also be found (Dinse et al. 1995), an important task is the localization of single tactile stimuli on the skin surface. The somatosensory system will be discussed in a forthcoming article (Eurich et al., in preparation). Problems such as the performance of the coarse coding mechanism for discriminating two stimuli or for analyzing complex sensory environments have not been addressed so far. It may be that in these cases small receptive fields (as, for example, in the human retina) or a combination of large and small receptive fields yield better results. In the coarse coding scheme, the firing of a neuron alone suffices to convey information about the position of an object. The mechanism is fast compared with firing rate coding since the mean firing rate is properly defined only for a sufficiently high number of action potentials, which takes a certain time to emerge. However, in the coarse coding framework, the neural firing rate is likely to convey further information about the object such as size, color, movement and pattern. The coarse coding mechanism employs massively parallel information processing with neurons which are nonspecific with respect to stimulus position. Clearly, in a piece of neural tissue one finds differences in the neurons’ preferences and reactions. In the past, this has led to the definition of neuron classes, for example in the amphibian optic tectum (Grüsser-Cornehls and Himstedt 1976; Roth and Himstedt 46 ∼∼ w(ρ|(ϑ,ϕ)) ∼ a(ϕ) 5 ∼ ∼ ρ (ϕ) ρ1(ϕ) 2 We assume that it takes the values 15◦ and 35◦ at ϕ̃ = 0◦ and ϕ̃ = 135◦ , respectively. The ramp-shaped part of the distribution extends from % = 60◦ to % = 90◦ . Taking into account these constraints, a rather tedious calculation yields the position-dependent size distribution ∼ 1-a(ϕ) w(%|(ϑ̃, ϕ̃)) = ρ (deg) 60 58320π−15552|ϕ̃| 1620π 2 −432π|ϕ̃| %− , 320πϕ̃2 +240π2 |ϕ̃|+45π3 320πϕ̃22+240π2 |ϕ̃|+45π3 2 90 − Fig. A1. The position-dependent receptive field size distribution w(%|(ϑ̃, ϕ̃)) as a function of receptive field size, %. For further explanations see text 58320π−15552|ϕ̃| 320π ϕ̃2 +240π 2 |ϕ̃|+45π 3 96|ϕ̃| 32|ϕ̃| 5π3 %− 5π2 , %+ 4860π +7344π|ϕ̃|−2304ϕ̃ 320π ϕ̃2 +240π 2 |ϕ̃|+45π 3 (A3) π ≤%≤% (ϕ̃) 1 36 , %1 (ϕ̃)<%≤%2 (ϕ̃) π ≤%≤ π 3 2 0, otherwise where 1978; Grüsser-Cornehls 1984). This does not mean that specific tasks can be assigned to single neurons: usually, single neuron behavior is too nonspecific to represent distinctive features or reactions. Instead, indiviual neurons seem to be involved in multiple tasks. Conversely, specific tasks are performed with many neurons. This holds, for example, for the decoding of information about the position of an object stored in a population of neurons with large receptive fields. In the local coding scheme, the extraction of object position in the form of Cartesian or polar coordinates is straightforward, whereas this seems to be difficult in the coarse coding scheme. However, such extraction of information does not appear to take place in the nervous system. Instead, there are always populations of neurons processing and conveying information, beginning from the cells of a receptor surface to pools of motor neurons from which subpopulations are recruited in order to yield specific muscle contractions. The network simulations in Sects. 4 and 5 show that under these circumstances, the evaluation of stimulus position is successfully achieved with a fairly small number of broadly tuned neurons. Appendix. The construction of a function w(%|(ϑ, ϕ)) The number of empirical data is not sufficiently high to yield a size dis2 , which would be necessary for a function tribution for all (ϑ, ϕ) ∈ SR w(%|(ϑ, ϕ)). Instead, we consider the overall size distribution given by a subset of the receptive fields shown in Fig. 1, and make additional assumptions concerning the increase in large receptive field neurons in the lateral visual field. Instead of w(%|(ϑ, ϕ)), the distribution w(%|(ϑ̃, ϕ̃)) is constructed, to which the transformation (4) can be applied. First, we assume that the size distribution does not depend on ϑ̃: ∂ ∂ ϑ̃ w(%|(ϑ̃, ϕ̃)) = 0 (A1) which is a reasonable simplification since we are mainly interested in the resolution along the horizontal meridian. Fig. A1 shows the structure of w(%|(ϑ̃, ϕ̃)). It consists of two parts: a tent-shaped part representing the majority of the receptive fields, and a ramp-like part representing large receptive fields. The areas under the curves are a(ϕ̃) and 1 − a(ϕ̃), respectively, to satisfy the normalization Zπ/2 w(%|(ϑ̃, ϕ̃)) d% = 1 2 ∀(ϑ̃, ϕ̃) ∈ SR (A2) 0 a(ϕ̃) is a linearly decreasing function of |ϕ̃| where a(ϕ̃ = 0◦ ) = 1 (no large receptive fields in the central visual field) and a(ϕ̃ = 135◦ ) = 0.8 (20% large receptive fields in the lateral visual field). The tent-shaped part of the distribution is a piecewise linear function extending from 5◦ to %2 (%̃); it is symmetric with respect to %1 (ϕ̃). %2 (%̃) increases linearly with |ϕ̃|, thus taking into account a broadening of the distribution from central to lateral. %1 (ϕ̃) = 2|ϕ̃| π + , 27 18 %2 (ϕ̃) = 4|ϕ̃| π + 27 12 (A4) Acknowledgements. For numerous stimulating discussions and the supply of salamander data we are indebted to Gerhard Roth, Ursula Dicke and Wolfgang Wiggers. We also thank Hermann Wagner for useful comments. This work was supported by the Deutsche Forschungsgemeinschaft with a grant from the Schwerpunktprogramm ‘Physiologie und Theorie neuronaler Netzwerke’. One of us (C.W.E.) has benefited from support by the Studienstiftung des deutschen Volkes and also acknowledges financial support from the BASF corporation while writing this paper. References 1. Bäck T, Hoffmeister F, Schwefel H-P (1991) A survey of evolution strategies. In: Belew R, Booker L (eds) Proceedings of the Fourth International Conference on Genetic Algorithms. Morgan Kaufmann, San Mateo, Calif, pp 2–9 2. Collett T (1977) Stereopsis in toads. Nature 267: 349–351 3. Dicke U, Roth G (1994) Tectal activation of premotor and motor networks during feeding in salamanders. Eur J Morphol 32:106–116 4. Dinse HR, Godde B, Spengler F (1995) Short-term plasticity of topographic organization of somatosensory cortex and improvement of spatial discrimination performance induced by an associative pairing of tactile stimulation. Internal Report 95-01, Institut für Neuroinformatik, Bochum 5. Eurich CW, Schwegler H (1997) Coarse coding: calculation of the resolution achieved by a population of large receptive field neurons. Biol Cybern 76: 357–363 6. Eurich CW, Roth G, Schwegler H, Wiggers W (1995) Simulander: a neural network for the orientation movement of salamanders. J Comp Physiol A 176: 379–389 7. Ewert J-P (1984) Tectal mechanisms that underlie prey-catching and avoidance behavior in toads. In: Vanegas H (ed) Comparative neurology of the optic tectum. Plenum Press, New York, pp 247–416 8. Gaillard F (1985) Binocularly driven neurons in the rostral part of the frog optic tectum. J Comp Physiol A 157: 47–55 9. Grüsser-Cornehls U (1984) The neurophysiology of the amphibian optic tectum. In: Vanegas H (ed) Comparative neurology of the optic tectum. Plenum Press, New York, pp 211–245 10. Grüsser-Cornehls U, Himstedt W (1976) The urodele visual system. In: Fite KV (ed) The amphibian visual system. Academic Press, New York, pp 203–266 11. Hinton GE, McClelland JL, Rumelhart DE (1986) Distributed representations. In: Rumelhart DE, McClelland JL (eds) Parallel distributed processing, vol 1. MIT Press, Cambridge, Mass, pp 77–109 12. Ingle D (1976) Spatial vision in anurans. In: Fite KV (ed) The amphibian visual system. Academic Press, New York, pp 119–140 13. Knudsen EI, Konishi M (1978) A neural map of auditory space in the owl. Science 200: 795–797 14. Konishi M (1993) Listening with two ears. Sci Am 268(4): 34–41 15. Matsushima T, Roth G (1990) Fast excitatory action of optic tectum on tongue motoneurons in the tongue-projecting salamander Hydromantes italicus. In: Elsner N, Roth G (eds) Brain – perception – cognition. Thieme, Stuttgart, poster 87 47 16. Rechenberg I (1973) Evolutionsstrategie. Friedrich Frommann, Stuttgart 17. Rettig G, Roth G (1986) Retinofugal projections in salamanders of the family Plethodontidae. Cell Tissue Res 243: 385–396 18. Roth G (1976) Experimental analysis of the prey catching behavior of Hydromantes italicus Dunn (Amphibia, Plethodontidae). J Comp Physiol 109: 47–58 19. Roth G (1987) Visual behavior in salamanders. Springer, Berlin Heidelberg New York 20. Roth G, Himstedt W (1978) Response characteristics of neurons in the tectum opticum of Salamandra. Naturwissenschaften 65: 657–658 21. Roth G, Wake DB (1985) The structure of the brainstem and cervical spinal cord in lungless salamanders (family Plethodontidae) and its relation to feeding. J Comp Neurol 241: 99-110 22. Rumelhart DE, Hinton GE, Williams RJ (1986) Learning representations by back-propagating errors. Nature 323: 533–536 23. Stauffenberg B, Godde B, Spengler F, Dinse HR (1994) Time course and persistence of changes of human spatial discrimination performance induced by a paired tactile stimulation protocol. In: Elsner N, Breer H (eds) Sensory transduction. Thieme, Stuttgart, poster 262 24. Uhlenwinkel O, Eurich CW, Schwegler H (1994) A neural network for the auditory system of barn owls. In: Elsner N, Breer H (eds) Sensory transduction. Thieme, Stuttgart, poster 873 25. Wiggers W (1991) Elektrophysiologische, neuroanatomische und verhaltensphysiologische Untersuchungen zur visuellen Verhaltenssteuerung bei lungenlosen Salamandern. Thesis, University of Bremen 26. Wiggers W, Roth G, Eurich CW, Straub A (1995a) Binocular depth perception mechanisms in tongue-projecting salamanders. J Comp Physiol A 176: 365–377 27. Wiggers W, Eurich CW, Roth G, Schwegler H (1995b) Salamander und Simulander: Experimente und Modellierung zur Raumorientierung bei Schleuderzungensalamandern. Neuroforum 1: 6–16