Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Executive functions wikipedia , lookup
Cognitive neuroscience of music wikipedia , lookup
Brain Rules wikipedia , lookup
Neuropsychology wikipedia , lookup
Biology of depression wikipedia , lookup
Human brain wikipedia , lookup
Catastrophic interference wikipedia , lookup
History of neuroimaging wikipedia , lookup
Neuroscience and intelligence wikipedia , lookup
Time perception wikipedia , lookup
Aging brain wikipedia , lookup
Neurophilosophy wikipedia , lookup
Artificial intelligence wikipedia , lookup
Eyeblink conditioning wikipedia , lookup
Nervous system network models wikipedia , lookup
Emotion and memory wikipedia , lookup
Neuroeconomics wikipedia , lookup
Types of artificial neural networks wikipedia , lookup
Recurrent neural network wikipedia , lookup
Neuroplasticity wikipedia , lookup
Neuroesthetics wikipedia , lookup
Neural correlates of consciousness wikipedia , lookup
Neuroanatomy of memory wikipedia , lookup
Embodied cognitive science wikipedia , lookup
Affective neuroscience wikipedia , lookup
Orbitofrontal cortex wikipedia , lookup
Holonomic brain theory wikipedia , lookup
Artificial general intelligence wikipedia , lookup
Perceptual control theory wikipedia , lookup
Emotion perception wikipedia , lookup
Metastability in the brain wikipedia , lookup
Hierarchical temporal memory wikipedia , lookup
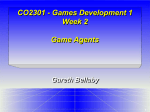
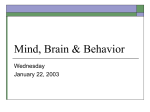
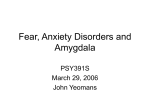
International Journal of Computer Application Issue 3, Volume 5 (September - October : 2013) Available online on http://www.rspublication.com/ijca/ijca_index.htm ISSN: 2250-1797 REVIEW OF EMOTIONAL INTELLIGENT CONTROLLER S.Senthilkumar1, S.Vijayan2 1 Department of Electrical and Electronics Engineering, United institute of technology, Coimbatore, 2 Tamilnadu, India. Principal Surya engineering college, Erode, Tamilnadu, India Abstract- Artificial Intelligence (AI) and Biologically- inspired techniques, particularly the neural networks, are recently having significant impact on power electronic and electric drives. Now a days a new controller called brain-emotional-learning- based Intelligent controller is applied to many electrical drives. The utilization of the new controller is based on the emotion - processing mechanism in the brain and is essentially an action selection, which is based on sensory inputs and emotional cues. This intelligent control is based on the limbic system of the mammalian brain. This paper presents a review of emotional controller. Keywords— Emotional learning, Intelligent controller, Brain, Artificial Intelligence. I. INTRODUCTION Artificial Intelligence (AI) techniques, such as expert system (ES), fuzzy logic (FL), artificial neural network (ANN), genetic algorithm (GA), particle swarm optimization (PSO) and biologically inspired (BI) have recently been applied widely in power electronics and motor drives. The aim of the AI is to model human or natural intelligence in a computer so that a computer can think intelligently like a human being [1], [2]. An intelligent controller is a system with embedded computational that has learning, self-organizing, or self-adapting capability. The computational intelligence has been increasingly utilized to solve any common and complex control problems. Therefore, it is true that AI techniques are now being widely, such as used in industrial process control, robotics,automated planning and scheduling, games, hypermedia, image processing, patterns recognition (handwriting, speech, and facial), logictics, data mining, medicine and healthcare, space and diagnostic technology [1]. The ES and FL techniques are rule based and tend to mimic the behavioral nature of the human brain; the NN is more generic in nature, which tends to pattern the biological NN directly. The GAs as well as the evolutionary computation techniques is based on principles of genetics. Basically, these GA methods solve optimization problems by a search process resulting in best (fittest) solutions (survivor). Among all the subbranches of AI, the NN and FL appear to have most uses for high-performance motor drives, which is evident in the numerous publications in the literature. According to Bose [3], there are many other feed forward and recurrent NN topologies, which require systematic exploration for their applications. Moreover, powerful intelligent control and estimation techniques can be developed using hybrid AI systems such as neuro–fuzzy, neuro–genetic, and neuro–fuzzy–genetic systems. The PSO is a population-based stochastic optimization technique developed by Eberhart and Kennedy in 1995 [4]. The technique inspired by social behavior of bird flocking or fish schooling. PSO shares many similarities with other evolutionary computation techniques such as GA. PSO is easy to R S. Publication, [email protected] Page 47 International Journal of Computer Application Issue 3, Volume 5 (September - October : 2013) Available online on http://www.rspublication.com/ijca/ijca_index.htm ISSN: 2250-1797 implement with few adjustable gains compared to GA. PSO has been successfully applied in many areas such as function optimization, artificial neural network training and fuzzy system control. PSO is also already a new and fast-developing research topic [5]. The BI system is inspired by the biological disposition of animals and mimics biomechanisms. From the beginning of the 1990s, the NN technology attracted the attention of a large part of the scientific community. Since then, the technology has been advancing rapidly, and its applications are expanding in different areas [1], [2], [5]. Recently, researchers have developed a computational model of emotional learning in mammalian brain. Based on the cognitively motive open loop model, Brain Emotional Learning Based Intelligent Controller (BELBIC) was introduced for the first time by Lucas in 2004 [6]. The Brain Emotional Learning (BEL) is divided into two parts, very roughly corresponding to the amygdala and the orbitofrontal cortex, respectively. The amygdaloid part receives inputs from the thalamus and from cortical areas, while the orbital part receives inputs from the cortical areas and the amygdala only. The system also receives reinforcing (REW) signal. There is one A node for every stimulus S (including one for the thalamic stimulus). There is also one O node for each of the stimuli (except for the thalamic node). There is one output node in common for all outputs of the model called MO. The MO node simply sums the outputs from the A nodes, and then subtracts the inhibitory outputs from the O nodes. The emotional learning occurs mainly in the amygdala. It has been suggested that the relation between a stimulus and its emotional consequences takes place in the amygdala part of the brain. The amygdala is a part of the brain that must be responsible for processing emotions and must correspond with the orbitofrontal cortex, thalamus, and sensory input cortex in the network model [1], [2], [5]. During the past few years, the BELBIC has been used in control devices for several industrial applications. The BELBIC has been successfully employed for making decisions and controlling simple linear systems as in, as well as in non-linear systems such as control of a power system, speed control of a permanent magnet synchronous motor (PMSM), automatic voltage regulator (AVR) system, flight control, position tracking and swing damping control of single input multi output (SIMO) overhead traveling crane, washing machine with evolutionary algorithms, automotive suspension control system, micro-heat exchanger, ventilating and air conditioning control problems [1], [2], [5]. Even, the BELBIC was designed and implemented on field programmable gate array (FPGA) for controlling a mobile crane in a model free and embedded manner. For the first time, the implementation of the BELBIC method for electrical drive control was presented by Rahman [7] in 2008. The Rahman’s results have shown superior control characteristic, particulary very fast response, simple implementation, and robustness with respect to disturbances and parameter variations. The results indicate the ability of BELBIC to control unknown non-linear dynamic systems. The implementation of the emotional controller shows good control performance in terms or robustness and adaptability (high auto learning feature). Flexibility is one of BELBIC’s characteristics and it has the capacity to choose the most-favoured response. Therefore, the BELBIC can be easily adopted for niche mechatronics and industrial applications II. BRAIN EMOTIONAL LEARNING BASED INTELLIGENT CONTROLLER (BELBIC) In mammals, limbic system is used to process emotional responses. Limbic system is present in cerebral cortex.The main components of the limbic system are the amygdala, orbitofrontal cortex, thalamus and the sensory cortex. The amygdala can communicate with all R S. Publication, [email protected] Page 48 International Journal of Computer Application Issue 3, Volume 5 (September - October : 2013) Available online on http://www.rspublication.com/ijca/ijca_index.htm ISSN: 2250-1797 other cortices within the limbic system. The primary affective conditioning of the system occurs within the amygdala. That is, the association between a stimulus and its emotional consequence takes place in this region. Association between a stimulus and its emotional consequence take place in the amygdala. The task of the amygdala is thus to assign a primary emotional value to each stimulus that has been paired with a primary reinforce . This task is aided by the orbitofrontal cortex. ―In terms of learning theory, the amygdala appears to handle the presentation of primary reinforcement, while the orbitofrontal cortex is involved in the detection of omission of reinforcement .The view of brain is shown in fig 2 .The BELBIC network model and structure is shown in fig 3 and fig 4 [8].The mechanism behind the BELBIC is based on sensory inputs and emotional cues. Emotional cues are depends on the performance objectives. Fig 2.View of brain Emotional learning and process takes place in amygdala [8]. Amygdala is having relationship with orbitofrontal cortex, thalamus, and sensory input cortex in the network model[8]. Fig 3.BELBIC Network R S. Publication, [email protected] Page 49 International Journal of Computer Application Issue 3, Volume 5 (September - October : 2013) Available online on http://www.rspublication.com/ijca/ijca_index.htm ISSN: 2250-1797 Fig.4 BELBIC Structure BELBIC based control system structure is shown in fig 5. Fig.5 BELBIC based control system structure. The amygdala and the orbit frontal cortex have a network-like structure, they have connection with each sensory input. Also, there is another connection for thalamus input within the amygdala The value of this input is equal to the maximum value of the sensory inputs[8]. BELBIC model is explained below. The Emotional cue can be calculated by the equation 1 (1) The sensory input can be calculated by equation 2. (2) R S. Publication, [email protected] Page 50 International Journal of Computer Application Issue 3, Volume 5 (September - October : 2013) Available online on http://www.rspublication.com/ijca/ijca_index.htm ISSN: 2250-1797 Where EC, MO, SI and e are emotional cue, controller model output, sensory input and output error .W1, W2, W3, W4 and W5 are the gains to be tuned to get desired controller output. Amygdala output is given by equation 3. A= Ja.SI (3) Orbitofrontal cortex output is given by equation 4. O=Jo.SI (4) Jo is the gain in orbitofrontal connection. Ja is the gain in amygdala connection. Model output is given by the equation 5. MO=A-O (5) . III.CONCLUSIONS There are many artificial intelligence tools are existing for control applications. Brain Emotional Learning Based Intelligent Controller (BELBIC) has quick auto learning capacity compared to other controllers. This controller can be easily implemented in hardware. References [1] Markadeh GRA, Daryabeigi E, Lucas C, Rahman MA. Speed and Flux Control of Induction Motors Using Emotional Intelligent Controller. IEEE Transactions on Industry Applications. 2011; 47(3): 1126-1135. [2] Zarchi HA, Daryabeigi E, Markadeh GRA, Soltani J. Emotional controller (BELBIC) based DTC for encoderless Synchronous Reluctance Motor drives. Power Electronics, Drive Systems and Technologies Conference (PEDSTC). Tehran, Iran. 2011; 478-483. [3] Bose BK. Nonlinear Network Applications in Power Electronics and Motor Drives-An Introduction and Perspective. IEEE Trans. on Ind. Electronics. 2007; 54(1): 14-33. [4] Kennedy J, Eberhart RC. Particle swarm optimization. In: Proceedings-IEEE International Conference on Neural Networks (ICNN). Perth, Australia. 1995; IV: 1942–1948. [5] Dorrah HT, El-Garhy AM, El-Shimy ME. PSO-BELBIC scheme for two-coupled distillation colum process. Journal of Advanced Research. 2011; 2: 73-83 R S. Publication, [email protected] Page 51 International Journal of Computer Application Issue 3, Volume 5 (September - October : 2013) Available online on http://www.rspublication.com/ijca/ijca_index.htm ISSN: 2250-1797 [6] Lucas C, Shahmirzadi D, and Sheikholeslami N. Introducing BELBIC: Brain emotional learning based intelligent control. Int. J. Intell. Automat. Soft Comput. 2004; 10(1): 11–22. [7] Rahman MA, Milasi RM, Lucas C, Arrabi BN, and Radwan TS. Implementation of emotional controller for interior permanent magnet synchronous motor drive. IEEE Trans. Ind. Appl. 2008; 44(5): 1466–1476.. [8]Markadeh GRA, Daryabeigi E, Lucas C, Rahman MA. Speed and Flux Control of Induction Motors Using Emotional Intelligent Controller. IEEE Transactions on Industry Applications. 2011; 47(3): 1126-1135. [9] Zarchi HA, Daryabeigi E, Markadeh GRA, Soltani J. Emotional controller (BELBIC) based DTC for encoderless Synchronous Reluctance Motor drives. Power Electronics, Drive Systems and Technologies Conference (PEDSTC). Tehran, Iran. 2011; 478-483. R S. Publication, [email protected] Page 52