Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Nonsynaptic plasticity wikipedia , lookup
Neuroesthetics wikipedia , lookup
Types of artificial neural networks wikipedia , lookup
Neural engineering wikipedia , lookup
Aging brain wikipedia , lookup
Clinical neurochemistry wikipedia , lookup
Donald O. Hebb wikipedia , lookup
Neural oscillation wikipedia , lookup
Time perception wikipedia , lookup
Neuroeconomics wikipedia , lookup
Central pattern generator wikipedia , lookup
Stimulus (physiology) wikipedia , lookup
Synaptic gating wikipedia , lookup
Environmental enrichment wikipedia , lookup
Neural coding wikipedia , lookup
Neuroanatomy wikipedia , lookup
Evoked potential wikipedia , lookup
Nervous system network models wikipedia , lookup
Metastability in the brain wikipedia , lookup
Cognitive neuroscience of music wikipedia , lookup
Neuroplasticity wikipedia , lookup
Perceptual learning wikipedia , lookup
Activity-dependent plasticity wikipedia , lookup
Optogenetics wikipedia , lookup
Neuropsychopharmacology wikipedia , lookup
Muscle memory wikipedia , lookup
Eyeblink conditioning wikipedia , lookup
Embodied language processing wikipedia , lookup
Development of the nervous system wikipedia , lookup
Neural correlates of consciousness wikipedia , lookup
Motor cortex wikipedia , lookup
Channelrhodopsin wikipedia , lookup
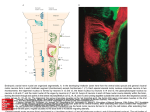
Review TRENDS in Neurosciences Vol.27 No.8 August 2004 Viewing and doing: similar cortical mechanisms for perceptual and motor learning Rony Paz1,2, Steven P. Wise3 and Eilon Vaadia1,2 1 Department of Physiology, Hadassah Medical School, The Hebrew University, Jerusalem 91120, Israel The Interdisciplinary Center for Neural Computation, The Hebrew University, Jerusalem 91904, Israel 3 Laboratory of Systems Neuroscience, National Institute of Mental Health, Bethesda, MD 20892-4401, USA 2 Historically, different groups of researchers have investigated the mechanisms of perceptual learning and motor learning. For sensory cortex, neurophysiological and psychophysical findings have linked changes in perception with altered neuronal tuning properties. However, less information has been forthcoming from motor cortex. This review compares recent findings on perceptual and motor learning, and suggests that similar mechanisms govern both. These mechanisms involve changes in both the center of neuronal tuning functions and their width or slope. The former reflects the values of the sensory or motor parameters that a neuron encodes, and the latter adjusts the encoding sensitivity. These similarities suggest that specific unifying principles for neural coding and computation exist across sensory and motor domains. Pity the plight of baseball batters: sometimes a pitch flies straight and fast, but other times it approaches on a slow curve. Batters must develop the motor skills needed to hit both pitches and choose between them as the ball travels toward them at 35 – 45 m s21. Accordingly, they must learn to recognize which pitch is which, pronto. Time does not permit the batter to weigh the pros and cons, the evidence for one pitch or the other, or the need for one motor skill or the other. The relevant knowledge is all implicit; the memories procedural. Rapidly rotating balls curve in flight, and so – to identify the pitch – batters detect the pattern made by the red stitches in the ball as it spins. That skill requires perceptual learning; the crucial batting skills require motor learning. Yet the brain of a batter must acquire both kinds of skill, and, if it cannot do so, that brain needs to find a different occupation. In trying to understand both perceptual and motor learning, neuroscientists have adopted a ‘divide-andconquer’ strategy, in which different researchers approach various parts of a problem. The ‘conquer’ part requires a synthesis of findings. David Marr’s distinctions of levels of understanding brain function [1] might help us do that. He distinguished the level of a ‘computational theory’, which clarifies the problem to be solved, from the levels of Corresponding author: Rony Paz ([email protected]). Available online 11 May 2004 ‘algorithm’ and ‘implementation’, which involve solving the problem. Because sensory and motor systems use similar ‘hardware’ – neurons and synapses – they must have close analogies at the level of implementation. However, the issue is whether those similarities extend to the algorithmic level. Such similarities would simplify the interaction between sensory and motor systems, but have neuroscientists obtained any empirical evidence to support this idea? At one level, sensory and motor systems resemble each other closely: almost all brain areas have neurons with ‘activity fields’, also known as receptive fields, motor fields or tuning curves (Figure 1). A population of neurons with different activity fields can provide the basis for representing sensory or motor parameters, and as such they can serve as the ‘primitives’ – the fundamental components – of a neural representation. The nature of these primitives and their locations in the brain can sometimes be inferred by measuring how learned skills transfer to situations other than those experienced previously. Take a simple perceptual skill, for example, the ability to discern the difference between bars of light oriented at slightly different angles. Imagine that learning this skill for one set of orientations at one place in the visual field does not generalize (or transfer) to other orientations or to other places in the visual field. In that case, such learning probably depends on narrowly tuned primitives at the level of the primary visual cortex (V1), where any given neuron responds to a small range of locations and orientations [2]. Ahissar and Hochstein [3] extended this idea and suggested that difficult visual skills depend on learning mediated by ‘lower’ visual areas, where narrow tuning leads to poor generalization, whereas easy skills depend on ‘higher’ visual areas, which have the opposite properties. The same principles apply to the motor system. The concept of neuronal primitives suggests that specific computational principles exist for sensorimotor transformations [4,5] and imposes constraints on the learning of those transforms [6,7]. As with perceptual learning, examination of how motor skills transfer reveals something about the primitives underlying motor learning. For example, the extensive generalization of learning seen for smooth-pursuit eye movements of different speeds suggests broadly tuned primitives [8], and studies of www.sciencedirect.com 0166-2236/$ - see front matter. Published by Elsevier Ltd. doi:10.1016/j.tins.2004.04.013 Review TRENDS in Neurosciences Vol.27 No.8 August 2004 (a) M1 V1 A1 Preferred orientation (PO) Preferred direction (PD) Best frequency (BF) Activity (spikes s–1) (b) Before After Orientation of a light bar Acoustic frequency Force Movement direction TRENDS in Neurosciences Figure 1. Neural primitives of representation take the form of activity fields in both sensory and motor areas. (a) The general location of the primary visual cortex (V1, green), the primary auditory cortex (A1, magenta) and the primary motor cortex (M1, blue). Adapted from Ref. [65]. Cells in these areas usually show sensitivity to a low-level feature of the stimulus or movement, and usually ‘prefer’ one value of this feature over others. Such values have different names for different systems, such as preferred orientations (PO) in V1, best frequencies (BF) in A1 and preferred direction (PD) in M1. (b) Tuning curve of a generic cell (gray) and two possible learning-related changes (red). The gray curve shows an the activity of an ideal cell as a function of the measured variable, be it orientation of a light bar (green), the frequency of a tone (magenta) or the direction of movement (blue), with the color of the x-axis corresponding to a cortical area in (a). The red curves indicate two types of change in the tuning of the cell that could result from learning. The left curve indicates a change in the width of the tuning curve without any change in amplitude of the peak or tuning value, and the right curve indicates a shift in the tuning value without any change in either the width or peak amplitude of the curve. The pictures on the right of each x-axis depict an improvement in either a perceptual or a motor skill. From top to bottom: better discrimination of line orientation, improved detection of an acoustic signals, and adaptation of reaching movements to imposed forces to restore accurate and straight trajectories towards a goal. force-field adaptation suggest a reliance on primitives that resemble the tuning curves of cerebellar Purkinje cells [9]. Specifically, some cerebellar tuning curves for hand velocity have two peaks: one in each of two diametrically opposed movement directions [10]. This property helps to account for the transfer of force adaptation from a practiced movement direction to movements in the opposite direction [9]. This review highlights some recent findings on the mechanisms of perceptual and motor learning, which point to unexpected similarities at Marr’s algorithmic level. Furthermore, whereas studies of learning-related changes typically focus on high-order cortical areas – the so-called association cortex – examples from primary cortical areas are emphasized here: one motor area [the primary motor cortex (M1)] and two sensory areas [V1 and the primary auditory cortex (A1)]. www.sciencedirect.com 497 Learning-related changes in tuning values The description of neuronal activity is commonly reduced from an equation specifying the full tuning curve (Figure 1) to a single ‘tuning value’, which commonly corresponds to the greatest discharge rate and is referred to as the ‘preferred’ or ‘best’ value. For example, A1 neurons have a best frequency (BF) for responding to tones, V1 cells have a preferred orientation (PO) for responding to lines and bars, and M1 cells have a preferred direction (PD) for reaching movements. This compact description of neuronal tuning is useful in many coding schemes, for example, the population vector, in which the PD of M1 cells and their instantaneous activity estimate movement direction. Learning sometimes induces shifts in the ‘tuning value’, which can be described as either attractive (a change towards some parameter) or deflective (a change away from some parameter). As an example of deflective changes, after adapting to a grating of one orientation, neurons in V1 of cats and monkeys shift their PO away from that orientation [11]. As an example of attractive changes, after applying intracortical microstimulation (ICMS) to a subpopulation of neurons with tuning to one orientation, adjacent neurons shift their PO towards that of the stimulated ones [12]. Another attractive tuning change occurs in V1 after pairing an orientated line stimulus with ICMS [13]. In the auditory system, attractive BF shifts follow auditory fear conditioning at a given frequency, acoustic discrimination learning, frequency adaptation and application of ICMS to a subpopulation of neurons with tuning to one frequency [14,15]. Deflective shifts occur only rarely [15]. The results from sensory systems have some recently discovered correlates in the motor system. Skill acquisition affects the PDs of single cells in M1 [16– 19], as does adaptation to directional errors induced by force fields [20,21]. In the latter experiments, monkeys practiced reaching movements while holding a robotic arm that imposed a complex pattern of forces. For example, one pattern of force was proportional to the velocity of the hand in both dimensions of a two-dimensional workspace. When monkeys learned to reach in this new environment, M1 cells shifted their PDs in about the same way as the muscles did. Moreover, a population of cells maintained their new PDs (and altered activity levels) after the monkeys readapted to moving without the imposed forces. Interestingly, adapting to local visuomotor transformations [22] and to viscous loads [23] did not induce consistent shifts in the PDs of M1 cells, so changes in the tuning value have not been universally observed in studies of motor learning. Further, albeit indirect, evidence for changes in the tuning value in M1 comes from the work of Classen et al. [24]. They had subjects move their thumb repeatedly in one direction and, after this training, applied transcranial magnetic stimulation (TMS) to M1. In this condition, the elicited movements systematically shifted towards the training direction – an attractive plasticity. This result could have come from a shift in the PDs of M1 cells, although this hypothesis remains to be tested. Nevertheless, the occurrence of PD shifts in these instances Review TRENDS in Neurosciences Vol.27 No.8 August 2004 suggests fundamental similarities in sensory and motor plasticity at the cortical level. Which neurons change? Another aspect of learning involves the selection of a subpopulation of neurons involved in a change in tuning properties. In V1, observed shifts in PO after adaptation to one orientation occur only in cells with nearby POs. Moreover, the larger the difference between the PO of a cell and the training orientation, the smaller the shift (Figure 2a) [25]. In the auditory system, the situation is similar: maximal shifts in BF were observed for cells with BFs close to the training BF (but not for those ‘too’ close) [26]. In the motor system, Paz et al. [22] recorded the activity in M1 before, during and after monkeys adapted to visuomotor transformations commonly called ‘rotations’. In the baseline condition, the monkey moved a cursor on a video monitor in a straightforward manner, similar to the mouse –cursor relationship on a computer. For example, when the monkey moved its hand forward, the cursor moved upwards (908 when 08 is to the right). During the learning condition, the movement of the cursor was ‘rotated’ so that a hand movement in some other direction moved the cursor upwards. For example, a 2 458 rotation required the monkey to learn that a hand movement forward and to the left led to upward cursor movement, and movements of the hand in any other direction also caused the cursor to move at a rotational transformation of 2 458. In the experiment, the monkeys learned a different ‘rotation’ each day, but saw only one target during the training period. Before and after training, the monkey moved the cursor to targets in eight directions from a central location in the baseline condition. In agreement with studies in humans involving similar transforms [27], the monkeys showed limited generalization of learning for Shape of the tuning curve and implications for improved coding Learning in sensory systems might affect the shape of tuning curves. For example, the slope of the curve might change at a particular point along the curve, even without a significant change in the tuning value (the center or peak of the curve) or the amplitude of the peak. This possibility, which is illustrated in Figure 1b, has several implications for neural coding. In one view, neuronal tuning curves encode the value of a stimulus by signifying their preferred value and the population serves as a set of basis functions. According to this idea, decoding can occur through function approximation [28,29] – that is, approximating stimulus value from the activity of a population of neurons with diverse tuning values and tuning-curve widths [30]. Viewed from a somewhat different perspective, tuning (b) (c) 30 0.4 P < 0.05 P > 0.05 15 Error Maximal orientation shift (deg) (a) movement directions other than the training direction. There was some generalization for movements within ^458 of the training direction, but virtually none for movements in more distant directions (Figure 2b). That is, the motor learning was largely local. Paralleling these behavioral findings, changes in activity were observed only in neurons with PDs close to the training direction (Figure 2c). This specificity in the way that the representational primitives of M1 change during motor learning could explain the limited spatial generalization observed. Only a selective subpopulation of cells, those with tuning values in or near the training direction, participated in the learning process. Movement in many different directions, however, requires participation of neurons with a wide range of tuning values. But neurons tuned to directions far from the training direction did not change. Hence, as in the sensory system [2], learning did not automatically transfer from a training place or direction to distant ones. 0 30 60 90 Post-learning trials 1 2 3 4 5 6 0.2 0.0 –0.1 315 –15 Orientation difference (deg) 0 45 90 135 180 225 270 Direction (deg) Difference in normalized rates 498 0.4 0.2 0.0 –180:–150:–90: –30: 30: –150 –90 –30 30 90 90: 150: 150 180 PD distance from learned direction (deg) TRENDS in Neurosciences Figure 2. Learning-related changes occur in a selected subpopulation of cells. (a) In the task used to generate these data, brief presentations of a grating stimulus (alternating dark and bright bars) caused adaptation to its orientation. For cells in the primary visual cortex (V1), shifts in their preferred orientation (PO) depended on the angular distance of their original PO from the presented orientation (black represents significant shifts). The closer their original PO to the one presented, the more their PO shifted. Negative values indicate attractive shifts (i.e. shifts towards the experienced orientation). This finding indicates that changes in activity occurred most prominently in a selected subpopulation of neurons. Adapted, with permission, from Ref. [25]. (b) Monkeys adapted on a daily basis to rotational visuomotor transformations that required them to move their hand at an angle relative to the direction of a cursor. During training, only one target appeared (indicated as 908). The plot shows the after-effects of training for movements in eight directions, all tested after adaptation but with no ‘rotation’ (the baseline condition). After-effects were most pronounced for the training direction (908) and decreased as a function of angular distance from it (and as a function of number of trials, shown by the different colors), indicating poor generalization and showing that adaptation is local with respect to movement direction. Adapted, with permission, from Ref. [22]. (c) For primary motor cortex (M1), neuronal activity was recorded before, during and after the learning shown in (b). Each value on the x-axis represents a range of angular deviations from the preferred direction (PD) of the cells. The notations describe a range of PD differences between the value at the top and the value at the bottom, separated by a colon. Cells increased their activity in a delay period preceding movement, but only for movements in or near the training direction and only for cells with PDs near that direction. This shows that changes occur in a selected subpopulation of neurons and could explain the poor generalization observed in (b). Adapted, with permission, from Ref. [22]. www.sciencedirect.com Review 499 TRENDS in Neurosciences Vol.27 No.8 August 2004 curves represent a probability distribution through which neurons encode stimulus intensity with a degree of uncertainty included [29]. Decoding could occur through a Bayesian-inference process, which estimates the probability of a specific stimulus based on neuronal firing rates. Two factors have special importance in this process: the signal-to-noise ratio and the slope of the tuning curve. Lower noise allows a closer estimate of the veridical stimulus value by each single observation and thus leads to more reliable read-outs. Steeper tuning curves provide more distinguishable firing rates at adjacent points along the curve, increasing the sensitivity of a neuron to stimulus values encoded on its flanks (Figure 1b). Supporting these ideas, several studies have reported increased neuronal sensitivity [25,31] and decreased variability [31] in V1 neurons after brief adaptation to gratings of one orientation (Figure 3a). A1 neurons also exhibit sharpening of their tuning curve after focal electrical stimulation [32] and following training on a frequency (a) discrimination task [33]. Recently, Schoups et al. [34] have studied changes in the slope of V1 tuning curves after monkeys mastered a fine-grained, orientation identification task. They found that the flanks of tuning curve for the orientation of a bar-like stimulus have a higher slope than before the perceptual learning (Figure 3b). Thus, in sensory systems, learning-related changes in the width of a tuning curve could be secondary to an increase in the slope of its flanks. Until lately, evidence of this kind was unavailable for the motor system. Recent studies, however, show that cells change the strength of their directional preference during the course of learning [16,18,19] and that this plasticity can aid in predicting planned and performed movements [18,19,35,36] (Figure 3c). As in sensory systems, probability-based analytical approaches show promise [37]. For example, under certain conditions, better decoding of movement direction can be achieved by using a Bayesian estimator than by using a population vector [37]. (b) Slope at TO (% change deg–1) Mean spike count 1.6 Control Adaptation 1.2 0.8 0.4 0.0 3.0 2.0 1.0 0 0 45 90 135 Orientation (deg) –32 0 16 32 47 –47 –16 Preferred orientation (PO) – Trained orientation (TO) 180 (c) (d) ∆ Mean R2 0.1 0.0 0.5 2 0.0 –0.5 –0.1 –1.0 0 10 20 30 Day of training 40 r = 0.492 P = 0.002 1 0 Change in slope Information increase after learning (bits) 1.0 –90 0 90 Distance from training direction –5 0 5 Change in slope of tuning curve (spike per rad/4) TRENDS in Neurosciences Figure 3. Learning-related changes in the shape of tuning curves. (a) After a brief period of adaptation to a grating orthogonal to the preferred orientation (PO) of the cell, the tuning curve of this primary visual cortex (V1) cell sharpened (gray) relative to its tuning before that training (black). Sharpening of the tuning curve could increase the sensitivity of the neural code. As the cell responded to a narrower spectrum of stimulus values, its response encoded more specifically the actual stimulus value. Adapted, with permission, from Ref. [25]. (b) In a different study of V1 cells, monkeys were trained to identify the orientation of a small grating and showed improvement that was specific for both stimulus location and orientation. The graph shows the slope of the flanks of the tuning curves for a population of V1 neurons, as a function of how much the PO of each cell differed from the training orientation (TO). With training (red line), that slope increased relative to the absence of training (broken blue line), but only for neurons with a PO within a 12–208 range from the training orientation. The increase in slope provides a larger difference in response to adjacent values of the stimulus and, therefore, improves sensitivity and discriminability of the stimuli. Adapted, with permission, from Ref. [34] q (2001) Nature Publishing Group (http://www.nature.com/). (c) In a study of primary motor cortex (M1) neurons, monkeys moved a cursor through neuronal activity, alone (brain control), or with their hand. R 2 values represent the degree correlation of each cell with movement direction. The plot shows the difference D in R 2 (brain control minus hand control) as monkeys learned the brain-control skill. The degree of directional tuning of M1 cells showed daily improvement as a function of training in the brain-control task. Adapted, with permission, from Ref. [18] q (2002) American Association for the Advancement of Science (http://www.sciencemag.org). (d) A different study of M1 neurons [22] showed a correlation between the information content of the cells about movement direction and the slope of their tuning curves. Information content was measured as the mutual information between firing rate and direction of movement for single cells after learning rotational transformations. Some cells significantly increased their information content after learning (red asterisks) but others did not (gray dots). Information content correlated with the slope of the tuning curve (main plot), but did so only for the training direction (inset). The increased slope observed in M1 is reminiscent of the change observed in V1 in (a) and could enable finer distinctions among nearby movement directions. Adapted, with permission, from Ref. [38]. www.sciencedirect.com 500 Review TRENDS in Neurosciences Vol.27 No.8 August 2004 Evidence that the encoding process can also support probabilistic approaches was recently revealed by a close examination of neuronal activity after learning visuomotor ‘rotations’ of the sort already described. Paz and Vaadia [38] demonstrated that M1 neurons contained more information about direction of movement after learning than before, and that this increase in information content correlated with an increase in the slope of the tuning curve (Figure 3d). Furthermore, this slope increase was specific to the part of the tuning curve near the training direction (Figure 3d, inset). Why would M1 transmit more information about the executed movement and allow improved decoding? According to the traditional view, better information promotes efficiencies in spinal computations, leading to enhanced performance in terms of success in achieving goals within task constraints. In addition, however, the motor system also transmits an internal signal, termed efference copy or corollary discharge [39], which informs other computational networks about the generated movement. This signal can help plan subsequent action. More importantly, it can generate a prediction about the potential outcome of a movement in time to provide corrections before a movement has ended, a computation called a forward model [40,41]. Accordingly, improved encoding of information provides as much benefit for the motor system as for sensory systems, perhaps because, as for sensory areas, other brain areas need to use the signals generated by motor areas. Perceptual learning is thought to result from an expanded representation of the trained stimulus dimensions [42], and similar concepts have been suggested for motor learning [24]. Results such as those discussed in this section suggest that instead of thinking about expanded representations in terms of the number of cells encoding a given stimulus dimension or movement parameter, a more subtle change in the way that cells encode stimuli, which is reflected in tuning-curve adjustments, could account for both perceptual and motor learning. Contextual specificity and complexity of responses Although many neurons in sensory areas are tuned to the types of low-level stimulus features discussed so far, they can also be tuned to complex interactions of low-level features that cannot be predicted from their linear combinations, including specific visual objects [43] and natural, complex acoustic signals [44,45]. In the motor system, an example of this phenomenon comes from studies of bimanual arm movements. The responses of M1 neurons cannot be explained as a linear combination of their responses during performance of the separate unimanual movements that compose them [46,47]. Interestingly, similar observations have been made for binaural interactions: many A1 neurons exhibit complex interactions, responding maximally to specific combinations of sound levels in the two ears [48]. Learning can also be specific to the context of skill acquisition. This principle has long been established for the sensory system [2]. For example, Crist et al. observed limited transfer of perceptual learning between a spatial bisection task and a Vernier task (Figure 4a, left), despite www.sciencedirect.com the fact that both require enhanced acuity for the spatial separation between lines [49]. Similarly, V1 cells exhibit contextual modulation in the bisection task [50]. A line outside their receptive field affected their response to a parallel line inside it, but only when the animal performed the bisection task (Figure 4a, lower right), not when it performed a fixation task (Figure 4a, upper right). Another example of context dependency comes from the auditory system. Ulanovsky et al. [51] recorded the activity of single cells in A1 while cats heard sequences of two frequencies (close to the BF of the cell). When the first frequency was rare, cells responded more strongly to it than to the second frequency. However, when the first frequency was common, cells responded less strongly to it that to the other frequency (Figure 4b). Thus, neurons in A1 adapted in a specific contextual way; they modulated their activity in response to the statistics of stimulus occurrence (rare versus common), rather than exclusively to tone frequency. Similarly, learning new motor tasks can be context dependent [52]. For example, evidence for dependency of motor learning on visual context was provided by Cohn et al. [53], who trained people to adapt to Coriolis forces in an environment in which their whole bodies rotated. When the participants experienced a visual-rotation illusion, which mimicked the context of Coriolis forces, they compensated for reaching movements as if they were under the influence of that force. Can people learn two motor skills in parallel, but in different contexts? If so, then it seems likely that the motor system uses multiple controllers that can be selected and switched according to task context [54,55]. In some situations, learning multiple skills in parallel seems to be difficult. For example, sometimes when people try to learn a second skill before they have fully consolidated the first, practice on the second skill disrupts that consolidation. In these experiments, people learn to overcome errors in movements that are induced experimentally. The difficulty in learning two skills in quick succession occurs both when the induced errors depend on limb dynamics (forces) [56] and when they depend on kinematics (position and its derivatives) [57]. However, when errors in one direction (e.g. clockwise errors) depend on dynamics, whereas those in the other direction (e.g. counter-clockwise errors) depend on kinematics, parallel learning can occur [57]. This finding suggests that, at least in the some conditions [58], people learn dynamics and kinematics in different contexts and depend on at least partially different neural systems [59]. Furthermore, even within the domains of kinematics and dynamics, parallel context-dependent learning is possible. For kinematics, consolidation is not disrupted when people experience opposing rotations while performing two different tasks (e.g. a continuous drawing task versus a reaching task [60]). For dynamics, when two opposing force fields are presented at different hand positions, people can simultaneously learn both skills and switch between them [61]. Adapting to two force fields that are based on contextual cues takes extensive practice, and might be impossible under some circumstances [62]. In other situations, however, such as when random and frequent switching of context occurs, people Review (a) (b) Normalized response 8 Fixation trials (c) 1 f1 f1 f1f2 f1 f1 f1 2 f2 f2 f1 f2 f2 f2 f2 3 f1 f2 f1 f1 f2 f2 f1 f1 occurs at 10% 50% 90% 1 –1 0 1 Spikes s–1 Normalized response 8 Bisection trials 501 TRENDS in Neurosciences Vol.27 No.8 August 2004 1 –1 0 f2 occurs at 10% 50% 90% 1 Distance (deg) Vernier task 0 230 Time (ms) TRENDS in Neurosciences Figure 4. Contextual modulation of activity in primary cortical areas. (a) In a study of primary visual cortex (V1) cells, response properties were measured when monkeys performed either of two tasks: detection of a small change in the brightness of the fixation spot (fixation trials) and a three-line bisection task in which subjects determined the position of a line relative to parallel lines (bisection trials). (Also shown is a depiction of the Vernier task, in which a line is judged in relation to a colinear line rather than in relation to two parallel lines, as in the bisection task.) The top right-hand plot shows the tuning curve of one cell as a function of the placement of parallel bars while the monkey was performing the fixation task. The plot in the lower right-hand corner shows the tuning curve of the same cell for the same set of parallel bars while the monkey performed the bisection task. The very different shape of the tuning curve shows that some V1 cells have a task-dependant response that cannot be explained entirely by the low-level physical features of the stimulus. Adapted, with permission, from Ref. [50] q (2001) Nature Publishing Group (http://www.nature.com/). (b) In a study of primary auditory cortex (A1) neurons, each stimulus set (upper panel) consisted of three blocks. In block 1, the lower-frequency tone (f1) was common (90%) and the higher frequency tone (f2) was rare (10%). In block 2, these percentages were reversed, and in block 3 the two stimuli occurred equally often. The average response of a cell to f1 appears in the middle panel, that to f2 in the lower panel. The cells responded to both stimuli more when they were rare (red) than when they were common (blue), and therefore modulate their activity in response to the statistics of stimulus occurrence. Adapted, with permission, from Ref. [51]. (c) For the study of primary motor cortex (M1) cells depicted in Figure 3(c), lines connecting hand-controlled preferred directions (PDs) with brain-controlled PDs (circle ends) projected onto a unit sphere. Most cells had different PDs in the two task contexts. Adapted, with permission, from Ref. [18] q (2002) American Association for the Advancement of Science (http://www.sciencemag.org). can learn to reach accurately in two opposing, dynamicsdependent force fields, instructed only by nonspatial auditory and color cues [63]. Context effects can also be observed in the activity of M1 cells [64]. For example, Taylor et al. [18] trained monkeys to control the movement of a cursor in a threedimensional virtual-reality environment, either by the movement of their hand or via a brain– machine interface that translated M1 activity into cursor movement. They found that many cells acquired different PDs for the two similar, yet contextually different, tasks, and that this difference evolved systematically over many days (Figure 4c). In a similar task, monkeys controlled a brain– machine interface and performed reach and grasp movements [19]. Changes in the strength of directional tuning, distribution of preferred directions and strength of correlations were evident upon switching between braincontrolled and hand-controlled tasks. Thus, for both perceptual and motor learning, neuronal activity reflects not only the physical properties of the stimulus or movement, but also information about the relevant context. Concluding remarks William of Ockham (c. 1285– 1349), the medieval philosopher famous for formulating the principle of parsimony www.sciencedirect.com (‘Ockham’s razor’), would have wanted a unified account of perceptual and motor learning. The brain must solve problems within the constraints of its hardware: neurons and plastic synapses. It should not be surprising, therefore, that the solutions it has found for perceptual and motor learning resemble each other at Marr’s level of implementation. The similarities discussed here for the algorithmic level are more intriguing, and they also reflect a basic fact about the brain: like the baseball batter described in the opening paragraph, we have but one brain, which must both do and view. Acknowledgements We thank Reza Shadmehr and Paul Cisek for their comments on an earlier version of this paper. This work was supported in part by a Center for Excellence grant (8006/00) administered by the Israel Science Foundation (ISF), by the Bundesministerium für Bildung und Forschung – DeutschIsraelische Projektkooperation(BMBF – DIP), by grant 2001073 administrated by the Binational Science Foundation (BSF), and by a special contribution of the Golden Charitable Trust. R.P. was supported by a Constantiner fellowship. References 1 Marr, D. (1982) Vision: A Computational Investigation into the Human Representation and Processing of Visual Information, W. H. Freeman 2 Gilbert, C.D. et al. (2001) The neural basis of perceptual learning. Neuron 31, 681 – 697 502 Review TRENDS in Neurosciences Vol.27 No.8 August 2004 3 Ahissar, M. and Hochstein, S. (1997) Task difficulty and the specificity of perceptual learning. Nature 387, 401 – 406 4 Pouget, A. and Snyder, L.H. (2000) Computational approaches to sensorimotor transformations. Nat. Neurosci. 3 (Suppl.), 1192 – 1198 5 Buneo, C.A. et al. (2002) Direct visuomotor transformations for reaching. Nature 416, 632 – 636 6 Schaal, S. and Atkeson, C.G. (1998) Constructive incremental learning from only local information. Neural Comput. 10, 2047– 2084 7 Donchin, O. et al. (2003) Quantifying generalization from trial-by-trial behavior of adaptive systems that learn with basis functions: theory and experiments in human motor control. J. Neurosci. 23, 9032– 9045 8 Chou, I.H. and Lisberger, S.G. (2002) Spatial generalization of learning in smooth pursuit eye movements: implications for the coordinate frame and sites of learning. J. Neurosci. 22, 4728 – 4739 9 Thoroughman, K.A. and Shadmehr, R. (2000) Learning of action through adaptive combination of motor primitives. Nature 407, 742 – 747 10 Coltz, J.D. et al. (1999) Cerebellar Purkinje cell simple spike discharge encodes movement velocity in primates during visuomotor arm tracking. J. Neurosci. 19, 1782– 1803 11 Dragoi, V. et al. (2000) Adaptation-induced plasticity of orientation tuning in adult visual cortex. Neuron 28, 287– 298 12 Godde, B. et al. (2002) Plasticity of orientation preference maps in the visual cortex of adult cats. Proc. Natl. Acad. Sci. U. S. A. 99, 6352 – 6357 13 Schuett, S. et al. (2001) Pairing-induced changes of orientation maps in cat visual cortex. Neuron 32, 325 – 337 14 Weinberger, N.M. (1998) Physiological memory in primary auditory cortex: characteristics and mechanisms. Neurobiol. Learn. Mem. 70, 226 – 251 15 Suga, N. et al. (2002) Plasticity and corticofugal modulation for hearing in adult animals. Neuron 36, 9 – 18 16 Chen, L.L. and Wise, S.P. (1996) Evolution of directional preferences in the supplementary eye field during acquisition of conditional oculomotor associations. J. Neurosci. 16, 3067– 3081 17 Wise, S.P. et al. (1998) Changes in motor cortical activity during visuomotor adaptation. Exp. Brain Res. 121, 285 – 299 18 Taylor, D.M. et al. (2002) Direct cortical control of 3D neuroprosthetic devices. Science 296, 1829 – 1832 19 Carmena, J.M. et al. (2003) Learning to control a brain – machine interface for reaching and grasping by primates. PLoS Biol. 1, E42 20 Li, C.S. et al. (2001) Neuronal correlates of motor performance and motor learning in the primary motor cortex of monkeys adapting to an external force field. Neuron 30, 593 – 607 21 Padoa-Schioppa, C. et al. (2002) Neuronal correlates of kinematics-todynamics transformation in the supplementary motor area. Neuron 36, 751 – 765 22 Paz, R. et al. (2003) Preparatory activity in motor cortex reflects learning of local visuomotor skills. Nat. Neurosci. 6, 882– 890 23 Gribble, P.L. and Scott, S.H. (2002) Overlap of internal models in motor cortex for mechanical loads during reaching. Nature 417, 938 – 941 24 Classen, J. et al. (1998) Rapid plasticity of human cortical movement representation induced by practice. J. Neurophysiol. 79, 1117– 1123 25 Dragoi, V. et al. (2002) Dynamics of neuronal sensitivity in visual cortex and local feature discrimination. Nat. Neurosci. 5, 883 – 891 26 Sakai, M. and Suga, N. (2001) Plasticity of the cochleotopic (frequency) map in specialized and nonspecialized auditory cortices. Proc. Natl. Acad. Sci. U. S. A. 98, 3507 – 3512 27 Krakauer, J.W. et al. (2000) Learning of visuomotor transformations for vectorial planning of reaching trajectories. J. Neurosci. 20, 8916 – 8924 28 Snippe, H.P. (1996) Parameter extraction from population codes: a critical assessment. Neural Comput. 8, 511 – 529 29 Pouget, A. et al. (2003) Inference and computation with population codes. Annu. Rev. Neurosci. 26, 381 – 410 30 Zhang, K. and Sejnowski, T.J. (1999) Neuronal tuning: to sharpen or broaden? Neural Comput. 11, 75– 84 31 Muller, J.R. et al. (1999) Rapid adaptation in visual cortex to the structure of images. Science 285, 1405 – 1408 32 Chowdhury, S.A. and Suga, N. (2000) Reorganization of the frequency map of the auditory cortex evoked by cortical electrical stimulation in the big brown bat. J. Neurophysiol. 83, 1856– 1863 www.sciencedirect.com 33 Recanzone, G.H. et al. (1993) Plasticity in the frequency representation of primary auditory cortex following discrimination training in adult owl monkeys. J. Neurosci. 13, 87 – 103 34 Schoups, A. et al. (2001) Practising orientation identification improves orientation coding in V1 neurons. Nature 412, 549 – 553 35 Chen, L.L. and Wise, S.P. (1997) Conditional oculomotor learning: population vectors in the supplementary eye field. J. Neurophysiol. 78, 1166– 1169 36 Laubach, M. et al. (2000) Cortical ensemble activity increasingly predicts behaviour outcomes during learning of a motor task. Nature 405, 567 – 571 37 Sanger, T.D. (2003) Neural population codes. Curr. Opin. Neurobiol. 13, 238 – 249 38 Paz, R. and Vaadia, E. (2004) Learning-induced improvement in encoding and decoding of specific movement directions by neurons in the primary motor cortex. PLoS Biol. 2, E45 39 Sommer, M.A. and Wurtz, R.H. (2002) A pathway in primate brain for internal monitoring of movements. Science 296, 1480 – 1482 40 Kawato, M. (1999) Internal models for motor control and trajectory planning. Curr. Opin. Neurobiol. 9, 718– 727 41 Flanagan, J.R. et al. (2003) Prediction precedes control in motor learning. Curr. Biol. 13, 146 – 150 42 Gaffan, D. (1996) Associative and perceptual learning and the concept of memory systems. Cognit. Brain Res. 5, 69– 80 43 Lee, T.S. et al. (2002) Neural activity in early visual cortex reflects behavioral experience and higher-order perceptual saliency. Nat. Neurosci. 5, 589 – 597 44 Bar-Yosef, O. et al. (2002) Responses of neurons in cat primary auditory cortex to bird chirps: effects of temporal and spectral context. J. Neurosci. 22, 8619– 8632 45 Machens, C.K. et al. (2004) Linearity of cortical receptive fields measured with natural sounds. J. Neurosci. 24, 1089– 1100 46 Donchin, O. et al. (1998) Primary motor cortex is involved in bimanual coordination. Nature 395, 274– 278 47 Steinberg, O. et al. (2002) Neuronal populations in primary motor cortex encode bimanual arm movements. Eur. J. Neurosci. 15, 1371– 1380 48 Semple, M.N. and Kitzes, L.M. (1993) Binaural processing of sound pressure level in cat primary auditory cortex: evidence for a representation based on absolute levels rather than interaural level differences. J. Neurophysiol. 69, 449– 461 49 Crist, R.E. et al. (1997) Perceptual learning of spatial localization: specificity for orientation, position, and context. J. Neurophysiol. 78, 2889– 2894 50 Crist, R.E. et al. (2001) Learning to see: experience and attention in primary visual cortex. Nat. Neurosci. 4, 519 – 525 51 Ulanovsky, N. et al. (2003) Processing of low-probability sounds by cortical neurons. Nat. Neurosci. 6, 391 – 398 52 Wolpert, D.M. and Ghahramani, Z. (2000) Computational principles of movement neuroscience. Nat. Neurosci. 3 (Suppl.), 1212– 1217 53 Cohn, J.V. et al. (2000) Reaching during virtual rotation: context specific compensations for expected coriolis forces. J. Neurophysiol. 83, 3230– 3240 54 Wolpert, D.M. and Kawato, M. (1998) Multiple paired forward and inverse models for motor control. Neural Netw. 11, 1317 – 1329 55 Haruno, M. et al. (2001) Mosaic model for sensorimotor learning and control. Neural Comput. 13, 2201 – 2220 56 Shadmehr, R. and Brashers-Krug, T. (1997) Functional stages in the formation of human long-term motor memory. J. Neurosci. 17, 409– 419 57 Krakauer, J.W. et al. (1999) Independent learning of internal models for kinematic and dynamic control of reaching. Nat. Neurosci. 2, 1026– 1031 58 Tong, C. et al. (2002) Kinematics and dynamics are not represented independently in motor working memory: evidence from an interference study. J. Neurosci. 22, 1108 – 1113 59 Flanagan, J.R. et al. (1999) Composition and decomposition of internal models in motor learning under altered kinematic and dynamic environments. J. Neurosci. 19, RC34 60 Tong, C. and Flanagan, J.R. (2003) Task-specific internal models for kinematic transformations. J. Neurophysiol. 90, 578– 585 61 Gandolfo, F. et al. (1996) Motor learning by field approximation. Proc. Natl. Acad. Sci. U. S. A. 93, 3843 – 3846 Review TRENDS in Neurosciences Vol.27 No.8 August 2004 62 Karniel, A. and Mussa-Ivaldi, F.A. (2002) Does the motor control system use multiple models and context switching to cope with a variable environment? Exp. Brain Res. 143, 520 – 524 63 Osu, R. et al. (2004) Random presentation enables subjects to adapt to two opposing forces on the hand. Nat. Neurosci. 7, 111 – 112 503 64 Hepp-Reymond, M.C. et al. (1999) Context-dependent force coding in motor and premotor cortical areas. Exp. Brain Res. 128, 123– 133 65 Martin, J.H. (1989) Neuroanatomy: Text and Atlas, 2nd edn, Elsevier 3rd INMED/TINS conference THE MULTIPLE FACETS OF GABAERGIC SYNAPSES Sept. 15–18, 2004. Théâtre du Golfe, La Clotat – France Organised by Y. BEN-ARI Information on: www.inmed.univ-mrs.fr BEN-ARI Yehezkel (Marseille – France) GABA, brain maturation and epilepsies BERNARD Christophe (Marseille – France) Fate of GABAergic inhibition during epileptogenesis BUSZAKI György (Newark – USA) Grouping of cell assemblies by oscillation in the hippocampus CHERUBINI Enrico (Trieste – Italy) Coincidence detection enhances GABA release at mossy-fibreCA3 synapses in the developing hippocampus COSSART Rosa (France & USA) Imaging oscillators in brain structures FREUND Tamas (Budapest – Hungary) Presynaptic control of GABAergic transmission by endocannabinoids in the cerebral cortex GOZLAN Henri (Marseille – France) Developmental aspects of endo-canabinoid transmission GUTIERREZ Rafael (Mexico) The dual glutamatergic–GABAergic phenotype of the hippocampal granule cells HESTRIN Shaul (Stanford – USA) Networks of GABAergic neurons in the neocortex HOUANG Josh Z (New York – USA) Molecular mechanisms underlying the subcellular targeting of GABAergic synapses KAILA Kai (Helsinki – Finland) Two developmental switches in GABAergic signaling: KCC2 and CA VII KANDLER Karl (Pittsburgh – USA) Developmental refinement of an inhibitory sound localization circuit LLINAS Rodolfo (New York – USA) Cognition as an intrinsic resonant brain state that simulates reality LIU Guosong (Cambridge MA – USA) Organization of excitatory and inhibitory synaptic connections on dendritic tree and its implications for neural computation MARTY Alain (Paris – France) Short term plasticity of GABAergic synapses McBAIN Chris (Bethesda – USA) Novel mechanisms of plasticity at hippocampal mossy fiber interneuron synapses MILES Richard (Paris – France) Interneurons and population activities in the hippocampus MODY Istavan (Los Angeles – USA) Tonic inhibition and epilepsy MONYER Hannah (Heidelberg – Germany) Genetic manipulations to study sunchronous network activity RAKIC Pasco (New Haven – USA) Development and evolution of GABAergic interneurons SERNAGOR Evelyne (Newcastle upon Tyne –UK) Control of retinal maturation by changes in GABAergic function and by visual experience SOLTESZ Ivan (California – USA) Activity-dependent potentiation of endocannabinoid signaling at GABAergic synapses SPITZER Nicholas C (La Jolla – USA) Neurotransmitter specification: decisions and revisions that minutes can reverse KHAZIPOV Roustem (Marseille – France) Networks of GABAergic neurons in the neocortex STERIADE Mircea (Quebec – Canada) Role of thalamic reticular GABAergic neurons in normal and paroxysmal oscillations KULLMANN Dimitri (London – UK) Excitatory GABA in the early cortical activities KLAUSBERGER Thomas and SOMOGYI Peter (Oxford – UK) Space and time in hippocampal GABAergic connections www.sciencedirect.com