Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Recurrent neural network wikipedia , lookup
Haemodynamic response wikipedia , lookup
Embodied cognitive science wikipedia , lookup
Neuromuscular junction wikipedia , lookup
Holonomic brain theory wikipedia , lookup
Neuroplasticity wikipedia , lookup
Central pattern generator wikipedia , lookup
Development of the nervous system wikipedia , lookup
Neuroanatomy wikipedia , lookup
End-plate potential wikipedia , lookup
Brain–computer interface wikipedia , lookup
Electrophysiology wikipedia , lookup
Neurostimulation wikipedia , lookup
Evoked potential wikipedia , lookup
Metastability in the brain wikipedia , lookup
Neuropsychopharmacology wikipedia , lookup
Nervous system network models wikipedia , lookup
Stimulus (physiology) wikipedia , lookup
Multielectrode array wikipedia , lookup
Microneurography wikipedia , lookup
Neural engineering wikipedia , lookup
Proprioception wikipedia , lookup
Single-unit recording wikipedia , lookup
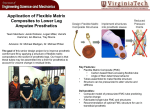
A1 58 Disclaimer—This paper partially fulfills a writing requirement for first year (freshman) engineering students at the University of Pittsburgh Swanson School of Engineering. This paper is a student, not a professional, paper. This paper is based on publicly available information and may not provide complete analyses of all relevant data. If this paper is used for any purpose other than these authors’ partial fulfillment of a writing requirement for first year (freshman) engineering students at the University of Pittsburgh Swanson School of Engineering, the user does so at his or her own risk. ELECTROMYOGRAPHIC DEVICES: THE LINK BETWEEN PATIENT AND PROSTHETIC Joseph Sukinik, [email protected], Mahboobin 10:00, Alexander Meek, [email protected], Mena 3:00 Abstract—Currently 25-50% of all prosthetic limbs are rejected by the user because they turn out to be more of a burden than a blessing, and approximately 29% of limb loss victims experience some symptom of significant depression. In this paper, our focus will be the method of signal transduction within the electromyographic (EMG) interface of a prosthetic hand. EMG is required to carry out tasks such as motor control and sensory perception in a way that feels analogous to the user’s original hand. The EMG interface works through electrodes placed on the surface of the skin and aligned with the forearm flexor and extensor muscles. The electrode detects action potentials from the nervous system through varying degrees of muscle flexion, then delivers a signal to the prosthetic, generating an action ranging from wrist rotation to gripping objects. The interface also receives stimuli from the prosthetic, which it returns to the electrode as a new electrical stimulus to be relayed to the brain as a sensation. A specific example of EMG technology explored in this paper is the Mobius Bionics LUKE arm, the first prosthetic arm to be approved by the FDA. This technology will open new avenues for engineers and researchers to learn how the human brain interacts with muscles, and therefore allows us to design artificial limbs that truly mirror the human body. Through this analysis, we hope to demonstrate the ways in which EMG interface technology in prosthetics can relieve amputees of their stress and pain, and thereby offer them hope, independence, and a higher quality of life. Key Words— Electrode, Electromyography, Interface, Limb loss, LUKE arm, Motor control, Prosthetic ELECTROMYOGRAPHY AND THE ERA OF ADVANCED PROSTHETICS In the United States alone, there are about 1.7 million people living with limb loss, and 185,000 additional amputations occur each year according to the journal Amputee Coalition [1]. Due to this vast number of amputees, interest in prosthetics has also increased and what was once science fiction is now becoming a reality. Over the course of the past few decades, the field of rehabilitation engineering has begun University of Pittsburgh, Swanson School of Engineering 1 Submission Date 03.31.2017 to flourish, with many incredible technological advancements being created. Bioengineers are striving to develop a prosthetic limb that can function as capably as a natural limb – one that will be able to grasp objects with varying tension while allowing the user to feel sensation. Electromyographic (EMG) devices, products that measure and interpret the brain’s electrical signals through muscle tissue, offer an opportunity to make this improvement a reality. Currently, prosthetics merely serve to allow some semblance of a normal life; they are often solid metal bars without any form of neural control. Without sensation or function, current prosthetics often lead to disappointment and disuse, sometimes causing the users to develop depressive symptoms. EMG is a promising concept due to the growing research on the human nervous system the basis of EMG technology. The goal of EMG devices is to create a prosthetic limb that amputees will be eager to use by increasing comfort, increasing control, and generating sensation. The engineers behind the design of EMG technology seek to provide a sustainable advancement within the field of rehabilitation engineering, specifically for prosthetic limbs. EMG will allow amputees to lead the same lives that they did before the amputation, revolutionizing the field of rehabilitation engineering and prosthetic devices, reversing the negative effects of limb loss. THE FOUNDATIONS OF EMG TECHNOLOGY IN FOREARM PROSTHETIC DEVELOPMENT Redefining the Prosthetic The field of rehabilitation engineering seeks to develop better and more efficient methods and models to give injured and disabled people their lives back. Prosthetic devices make up one of the largest components of the field, including not just limbs, but also cochlear implants and bionic eyes. For decades, the general design of a prosthetic limb has remained relatively constant, with most improvements being applied to the materials of the limbs to make them stronger, more durable, more comfortable, and more cost-effective. The first prosthetic limbs, made from wood, date back as far as 300 Joseph Sukinik Alexander Meek BC. Over time, better and more durable materials like bronze, iron, and steel were used in increasingly advanced designs, improving the lives of limb loss victims [2]. However, the first truly modern prosthetic limb was not created until the 1950’s, soon after the Artificial Limb Program (a national initiative to design better prosthetics for amputees) was founded in 1945 [2]. This prosthetic included hydraulic systems that used pressure to generate motion in joints. Today, prosthetics have a similar overall design, however instead of wood and copper as in Figure 1 below, they now use stronger mass-produced materials such as aluminum, titanium, or even 3D-printed plastic polymers as seen in Figure 2. device. Implantable electrodes are placed surgically beneath the skin, directly onto the nerves or onto the muscles, providing direct contact to the source of the electrical signal [5]. Each version has both advantages and disadvantages, each designed to provide the highest quality of life such that the technology can be sustainable in the long run. Implantable electrodes can generate more accurate results than superficial versions. This results in more precise motions for the prosthetic, however they require surgical procedures, which in turn demands high fees, increases potential health concerns including tissue damage and infection, and requires future surgeries to remove faulty electrodes [6]. EMG devices do not have the same high efficiency of signal measurement and interpretation; however, they do not require the high fees of surgery or have the same health concerns, and are easily removable. Within the category of superficial electrodes, there are two divisions: wet and dry. Wet electrodes that use Ag/AgCl solution, such as those used clinically, are typically better at conducting the electrical impulses from the nervous system due to the high electrolyte concentration, and adhere very well to the skin. However, despite decades of research, they lose effectiveness over time, need to be constantly replaced, and are quite uncomfortable when the use is mobile. On the contrary, dry electrodes lie directly on the surface on the skin without any type of conducting intermediary. As stated previously, it is again not as efficient at signal reception, as it registers slightly more “noise” from the surrounding tissue, and is difficult to keep in one location, thus needing “mechanical solutions” to keep it in place. Yet, traditionally the dry electrodes provide more comfort and do not need to be replaced [6]. Keeping all these comparisons in mind, this paper will be focusing on EMG devices that utilize dry electrodes for neural action potential reception for the forearm prosthetic device. FIGURE 1 [3] Wooden prosthetic hand (1916) THE UNDERLYING PROCESSES AND MATERIALS OF EMG TECHNOLOGY FIGURE 2 [4] Modern prosthetic hand by BeBionic in England Electromyographic devices depend on several key bodily processes in order to function properly. These processes can be narrowed down to two main body systems, the nervous system, and the muscular system. TheScientist.com defines electromyography as the reception, measurement, and interpretation of electrical signals as portrayed through muscle contraction and relaxation [5]. To properly explain how EMG devices function, both processes must be assessed in extreme detail, then apply them to the specific materials used in EMG devices. This context will then allow for the introduction of an example of an application of EMG devices, the LUKE arm. Neural interfacing is the most recent major development in prosthetic development because it incorporates the user’s own nervous system, utilizing electrical neural signals from the brain to control the prosthetic instead of an external source, such as a computer. By incorporating the brain into the design of prosthetics, the user can finally treat the prosthetic as their own. Neural Interfacing: The Good, the Bad, and the Ugly A superficial electromyographic (EMG) device is one way to harness the user’s neural impulses. However, there are other recent developments, such as implantable electrodes that also allow for wireless neural interfacing for a prosthetic 2 Joseph Sukinik Alexander Meek potential reaches the end of the neuron’s axon it releases neurotransmitters that then drift across the gap and bind to receptor proteins. These proteins change their orientation, making gaps for sodium to flow in and reestablish an action potential [12]. There are also types of neurotransmitters that inhibit the transmission of the signal, preventing the signal from traveling to the wrong location in the body. This ensures that the impulses designated to move the muscle arrive only at the muscle and initiate the action specified. Neuronal transmission of electrical impulses drive muscle contraction, and thus will drive the motion of the prosthetic. Action Potential Development and Transmission Every process in the body - the heartbeat, talking, thinking, sensation, perception, digestion, breathing, and motion – is controlled by the brain. Every single time a person moves a muscle, that action must be processed by the central nervous system (the brain and the spinal cord) before the message can be sent to the muscle. Motion control is typically centered in the cerebellum, the section at the base of the occipital region of the brain [8]. It is here that action potentials are typically developed to move each part of the body. An action potential is an electrical impulse developed by a chemical imbalance within a cell or series of cells. Each neuron, while in equilibrium, is at resting potential and has large quantities of potassium ions within the cell and sodium ions outside the cell’s membrane. In order for an action potential to be generated and maintained there must be an imbalance of these ions. After a stimulus such as touch, sight, or smell initiates an action potential, the cell membrane of a neuron is depolarized, causing an influx of sodium ions, further increasing the potential until it crosses the threshold voltage. After the action potential passes, the cell’s resting potential must be reestablished before another action potential can be generated, thus there is a refractory period where no other action potentials can be propagated. Figure 3 demonstrates the entire passage of an action potential by graphing voltage vs time. It illustrates the effect that action potentials are “all or nothing responses” and it is thus the timing of the action potentials and the number of them that determine the strength of the response in the muscle [9]. FIGURE 4 [11] Diagram of a neuron Myoelectric Contraction Electromyography is the analysis of electrical impulses produced by the nervous system through the muscles. In the normal human body, muscles will receive hundreds of impulses every second, causing it to contract or relax in very small amounts constantly, regardless of whether the movement is conscious or unconscious. Each and every contraction is determined by an electrical impulse, the more frequent the impulses, the more intense the contraction. Intensity of muscle contraction also depends on the number of signals, meaning that the higher the number of neurons touching the muscle, the greater the contraction. In Figure 5, a colored photo of the microscopic neuromuscular junction is shown, depicting how each muscle cell is in contact with at least one neuronal synapse. Neuron FIGURE 3 [10] Action Potential diagram, independent variable is time, dependent variable is voltage The potential generated by the central nervous system then begins to travel along the neurons (as seen in Figure 4), jumping between synapses due to release of a neurotransmitter called acetylcholine, which is also the neurotransmitter that will later bridge the gap between the nervous system and the muscular system. When the action Muscle Cell 3 Joseph Sukinik Alexander Meek The entire sEMG process hinges on being able to seamlessly read and transfer signals from muscles underneath the skin, and the key to this is maintaining “conformal contact” between the electrode mesh and the skin. The mesh must therefore be very thin such that it can morph to fit the intricacies of the surface of skin, optimal levels have been found to be between five and twenty-five micrometers thick. Fibers of this size are printed directly onto the skin via a stamp, as opposed to the conventional method of using flat adhesive pads with conductive gels. However, since the EES is more “exposed” in this method, it requires the use of “biocompatible, non-corrosive, electrochemically stable materials that resist surface oxidation” [16]. Gold, therefore, works very well and is the standard material of choice for use in signal translation. Surface EMG sensors must integrate hard electrode materials and softer supporting materials to be able to function successfully despite the flexing and stretching of the surface of human skin. Because of this requirement, the materials and structure of the sensor becomes integral to the success of the prosthetic device. Beyond the material component of the electrode, engineers also need to consider where electrodes should be located on the user to achieve optimal signal reception and interpretation. Generally, hand motions can be broken up into four pairs of motions: “grasp-release, left-right, up-down, and rotate” [17]. In order for a prosthetic hand to function as well as the original hand, it needs to be able to perform each motion, meaning that each of the muscles that cause these actions must be accounted for. In the table below, Figure 6, each muscle in the forearm is identified, as well as the action it is responsible for performing. FIGURE 5 [13] Visual of neurons directly interacting with muscle cells. When the action potentials arrive at the muscle cell, they must first bridge the synapse between neuron and muscle cell via acetylcholine, the same neurotransmitter that allowed the signal to jump between neurons. When acetylcholine reaches the cell membrane of the muscle, it binds to post-synaptic proteins, allowing an influx of sodium ions, which generates an electrical imbalance inside of the muscle cells [14]. As the electrical signal travels down the length of the muscle, portions of the current will diverge down the rows of muscle cells in order for the signal to reach the entirety of the muscle. Each row of muscle cells contains thick protein bundles called sarcomeres. Each sarcomere contains protein filaments called actin and myosin, the proteins that will subsequently generate a muscle contraction. Myosin is a thick protein strand (also called a filament) that when electrically stimulated, begins to pull thinner actin proteins together, a process deemed the Sliding Filament Theory of Muscle Contraction. Nature Journal describes the Sliding Filament Theory as if one was “given the task of bringing two bookcases together, [but are] limited to using only [their arms] and two ropes” [15]. Muscle contraction occurs a very small portion at a time, and depending on the strength of the electrical signal, the myosin will continue to cycle through pulling actin, releasing, and pulling again. Microscopic contractions occur throughout the entire muscle, and by adding every tiny contraction then overall a muscle contraction would be developed. If the electrical signal is consistently reapplied then the contraction is sustained, however, if the action potentials are ceased, then the myosin can detach from the action and the muscle will quickly relax and elongate. The goal of myoelectric devices is to register the frequency and number of action potentials, and then interpret them in the same way that sarcomeres do. EMG devices aim to replicate muscle contraction and relaxation such that there is virtually no difference in the motion of a prosthetic limb and a human limb. 1 2 3 4 Muscle Brachioradialis Extensor carpi ulnaris Pronator teres Electrodes: How to Make Them and Where to Put Them 5 Extensor communis digitorum Flexor carpi radialis Due to the very sensitive nature of myoelectric sensation, many factors influence the transmission of accurate signals from the electromyographic sensors to the prosthetic and back again. Issues like electrical noise and crosstalk contamination are magnified in surface electromyographic (sEMG) interpretation, so designers must therefore pay even more attention to defining features of sensor design like electrode size, shape, and layout. EMG sensors employ a class of technology referred to as epidermal electronic systems (EES) to interface with the skin and read and amplify the recorded signal. The interface is a system of very thin interconnected mesh of gold wires and electrodes that are placed in direct contact with the skin and surrounded with polyimide to “mitigate bending stresses in the metal” [16]. 6 Anconeus 7 Pronator quadratus Function Forearm flexion Extension of arm at wrist Forearm rotation and elbow flexion Finger and wrist extension Hand flexion and rotation at wrist Resistance of forearm rotation Initiates rotation FIGURE 6 [17] Table of forearm muscles and their functions EMG electrodes must be placed on each of these muscles to ensure that the prosthetic carries out the designed actions to the same extent that the original hand would have. Additionally, a study conducted by the Institute of Electrical and Electronics Engineers (IEEE) determined that as the number of electrodes increased, the clarity of the signal also increased; however, there is a limit to how close these sensors 4 Joseph Sukinik Alexander Meek can get without picking up conflicting signals [17]. If they are placed too close together, the crosstalk could cause an inaccurate pressure signal to be transferred to the prosthetic, which might then cause the hand to crush a delicate egg, or drop a heavy hammer. The most responsive and accurate prosthetics must combine sensitive electrode design, such as gold nanofiber mesh, with precise electrode placement to achieve the highest level of superficial electrical signal reception. react to get feedback, they can make quicker adjustments to their original input, allowing for greater precision. This method demonstratively outperformed the force feedback method in the German study when it came to applying an appropriate grasping force to an object [19]. The Future is Now: The LUKE arm The Mobius Bionics LUKE arm, funded by the Defense Advanced Research Projects Agency’s (DARPA) Rehabilitation Research and Development Service and formulated by DEKA Research Group, is one of the most advanced upper arm prosthetics in the industry today, as seen in Figure 7. It is the first upper arm prosthetic to be approved under the FDA’s new category for integrated prosthetic arms and offers users a variety of ways to control the arm’s 10 powered degrees of freedom [20,21]. Creating a Capable Prosthetic While it can be difficult to read and interpret electrical signals from upper arm muscles, it can be nearly as complicated to design a prosthetic arm device that can perform the complex motions necessary to carry out everyday tasks. Even something as simple as turning a doorknob involves a complicated array of finger positions and grasping strengths. It is therefore critical that the patient can control the prosthetic to a high degree of precision and accuracy. Sensory feedback is widely regarded as the avenue by which this necessary level of control can be attained [18,19]. Sensory feedback is the concept of relaying electrical impulses from the fingers of a prosthetic device back to the brain as perceived touch, thereby giving the user a heightened sense of control and feel for the amount of force they are applying through the prosthetic. There are multiple ways to generate this signal, namely contact-driven feedback or “control input” feedback. A study by a team of German neurorehabilitation researchers demonstrated that the “control input” method offered improved grasping performance over force feedback. The force feedback loop relies on force sensors on the tips of fingers in the hand for the sensation of touch, giving feedback in the form of electrical impulses about how firmly the prosthetic is grasping an object. This method, while successful, is limited because the user can only make proper adjustments to grip strength once the hand has made contact with the object. Some prosthetic researchers have tried to couple force sensation feedback with a velocity or position sensor to give the user more information about the action of the device, but these methods have been found to be inconsistent and restrictive [19]. Essentially, a prosthetic that employs the force based sensory feedback system will be favored over a system with no feedback, but the user will still have to tediously monitor the motions and closing speeds of their hand while grasping and picking up objects. On the other hand, the EMG interface can be used to provide feedback in a more predictive manner. Instead of a signal being relayed when the prosthetic makes contact with an object, the EMG feedback transmits signals that convey the user’s input strength, which allows the user to predict how strongly the prosthetic will react to their input. This method is considered “out of the loop” of the prosthetic because it does not consider the actions of the prosthetic, only the input of the user. Since the user does not have to wait for the prosthetic to FIGURE 7 [21] LUKE arm holding a grape This arm’s control system is fairly unique in the way that it can incorporate multiple sensors and pieces of equipment to offer the best control for the patient. The hand can be oriented to preset positions using a foot inertia sensor if desired, however the main control still operates through the EMG electrodes, and the fully realized EMG sensor is what makes this arm the most capable on the market for wounded warriors and amputees alike. Users can control the flexion and force of individual fingers and an opposable thumb, allowing them to create grip orientations that fit the object they are trying to pick up, move, or turn [21]. This technological development is a huge step towards eliminating the restrictions and limitations that amputees face daily in everyday tasks. Although this device has yet to be released for purchase, initial reviews by trial amputees have been very positive, with one user saying simply, “It works the way the patient thinks” [22]. This device is the closest developers have come to creating an arm equally as capable as a human arm. For this reason, the military has placed its funding behind the LUKE arm’s development, realizing the importance of restoring a 5 Joseph Sukinik Alexander Meek sense of being and self-sufficiency to limb-loss victims, hoping to serve those their soldiers just as they served their nation, giving them back their lives and happiness [23]. Losing one’s independence can be devastating, however with this new development in prosthetic design, many amputees may finally be able to get that independence back. have traumatic injuries might be seen as fortunate or lucky” [25]. Those who can afford the surgeries for new prosthetic limbs will do so, to be better than they were before. The future of neural prosthetic limbs has its potential drawbacks, however, in the short run, the benefits for those suffering from limb loss far outweigh the drawbacks. THE ETHICS OF PROSHETICS HOW EMG IS MAKING AN IMPACT ON THE AMPUTEE COMMUNITY A Luxury Item A Sustainable Solution When discussing a new technology, it is imperative to assess how the technology could have negative consequences in the future. For neural prosthetics, those negative consequences include high costs and a potential for personal improvement. When a new product enters a market, or a product considered to be a luxury item, the price is typically high until the product can be mass-produced. Neural prosthetics that allow for brain-interfacing run the risk of being priced very high. One man, Bertolt Meyer, received the newest technology, however he realized he was one of the lucky ones, stating: “Soldiers who lose limbs while serving get the latest technology, but civilians who lose an arm in a car accident only receive my pre-2009 version through their insurance. A 14-year-old one-armed boy who had his application for [a new prosthetic] turned down by the NHS recently ended up offering the surface of his prosthesis as advertising space to a Formula 1 racing team to obtain funding” [24]. As the current model for the prosthetic arm is updated, the potential for appealing to a single social class becomes more likely, as seen with the fourteen-year-old boy. This demonstrates the potential for prosthetics to develop new social classes within the amputee population. People who cannot afford the newest technology would be forced to use older versions, meaning they would have a lower quality of life. Sustainability is crucial for all engineering fields, as it weighs both the benefits and consequences of designing a new technology and then providing it to the public. For medical devices, sustainability directly refers to an increase in quality of life. The goal of designing a neural prosthetic device, as opposed to non-interfaced prosthetics, is to improve the quality of life for those living without one or more limbs. In this sense, EMG will be sustainable in the market due to its inherent ability to give back use of a limb. The positive effects include decreasing pain, increasing mental health, and increasing physical prowess. An important aspect to consider when evaluating the value of a prosthetic model is how well the actual amputees receive the technology. There are several components to address when designing a prosthetic for upper-arm amputees, from phantom limb pain to range of motion, and the better the prosthetic can meet these needs, the more likely it is to be well-received by the amputee. An ideal neural prosthetic device should allow an amputee to do simple and complex tasks just as well as anyone else, giving them the opportunity to live the lives they led previously, subsequently with a higher quality of life. High quality prosthetics like the LUKE arm are designed to mimic the function and feel of an actual human limb as closely as possible, and EMG represents a great avenue to do this. Stronger, Faster, Better Relieving Invisible Pain What happens when prosthetics begin to outperform the body? As prosthetics continue to be able to read the neural impulses better and better, prosthetic devices grow closer and closer to functioning the same as the original. What if in the pursuit of perfection, engineers develop prosthetics that ultimately work better than the natural body? While this may sound extreme, it is comparable to modern plastic surgery, where those who have money can use cosmetic technology to improve their appearance beyond natural standards. When this point is reached, there is a possibility that people may begin to seek personal augmentation, meaning self-improvement through prosthetics. The Institute for Ethics and Emerging Technologies (IEET) discusses how if this occurs, people may elect to amputate their own limbs to receive a new prosthetic. They also consider how “those who One of the most common afflictions for amputees is phantom limb pain, which affects up to 45% of all amputees [18]. Phantom limb pain occurs when a person feels pain in an absent limb due to a neurological nerve error, and it is very hard to treat with therapy or painkillers. When a limb is severed, the nerve center in the brain that was responsible for that limb becomes inactive. Dr. Thomas Weiss, who led an EMG research study at Friedrich-Schiller University, stated that “these areas take over the processing of sensory stimuli from other body parts, especially the arm stump and the face” which leads to the intensified sensations of phantom limb pain [18]. EMG technology helps address this complicated issue by allowing for bio-sensory feedback to be parlayed from the prosthetic to the brain in a way that was impossible before, which re-establishes a sensory connection with the inactive 6 Joseph Sukinik Alexander Meek areas of the brain. The conclusion of the Friedrich-Schiller study states that a “prosthesis with a feedback function appears to be a promising therapeutic tool to reduce phantom limb pain and to increase functionality in everyday tasks” [18]. By establishing this connection and relieving the amputee of their pain, more of the world is open to them, they can go out and do more without the fear of being crippled by pain. struggle to live a normal lifestyle. The field of rehabilitative prosthetics is trying to find a way to restore independence and confidence to these amputees. Prosthetic arms that integrate electromyographic sensors seem to be a viable way to do this. EMG’s ability to connect patient and prosthetic neurologically is vital to a successful integration of the prosthetic into the amputee’s lifestyle. The contractions of forearm muscles are read by carefully placed electrodes on the surface of the amputated limb, and translated into corresponding motions of the prosthetic. A key component of this system is the magnitude of the grasping force of the prosthetic hand, which can be monitored and adjusted by the user based on the sensory feedback that is relayed back through the EMG sensor. This feedback is also a critical part of making the prosthetic feel more like an actual arm, which then increases the rate of retention among users. Through the process of neural interfacing, EMG can produce sustainable solutions to phantom limb pain and mental diseases such as depression, granting those with neural prosthetics an opportunity for a better life, one that they want to live, for an even longer period of time. Prosthetic arms have developed from being immobile, wooden stand ins to becoming nearly full-functioning replacement limbs, and they are only getting more advanced. EMG and research groups like DEKA, with the LUKE arm, are paving a golden age of prosthetics, and shining a light that will surely brighten the lives of amputees everywhere. Restoring Touch, Restoring Life Being able to perform everyday tasks without too much added difficulty is extremely important in amputees’ efforts to live normal lives. Sensory feedback plays a large role in restoring this normal because of how important relative grip strength is to picking up and grasping objects. Providing feedback to the subject through the surface EMG interface during the process of grasping an object (online closed-loop force control) significantly increases their ability to apply the appropriate amount of force through the prosthetic and make real-time adjustments to this applied force [19]. FriedrichSchiller’s study describes exactly why this is such an important detail for the amputee: “Subjects developed significant skills for manipulating soft or fragile objects with the prosthesis and reached several personal goals in the use of the prosthesis. The study results underline the principle that a myoelectric prosthesis providing sensory feedback about grip strength might be advantageous… The somatosensory feedback of our prosthetic system might ease the usage of prostheses in everyday life, which, in turn, might lead to a higher acceptance of wearing prostheses on a long-term basis. The increased bilateral use of both upper extremities might also reduce the load on the non-amputated body side. Reducing excessive strain on the healthy side of the body may lead to less pain in the non-amputated limb and in the back” [18]. With 35% of the 1.7 million amputees in the US currently suffering from Major Depressive Disorder (MDD, national rate 6.7%), it is vital that every possible step is taken to improve their mental state [26,27,28]. Many factors contribute to this elevated rate of depression, including the inability to find work, a dislike of increased dependency, and a decrease in social interaction. EMG technology cannot completely absolve the issue [26]. However, a prosthetic that is able to model a human arm significantly better than past models can be a meaningful step forward for those suffering from a lowered sense of self-importance due to their disability. SOURCES [1] “Limb Loss Statistics.” Amputee Coalition. 2017. http://www.amputee-coalition.org/limb-loss-resourcecenter/resources-by-topic/limb-loss-statistics/limb-lossstatistics/. Accessed 2.27.2017. [2] “Atlas of Limb Prosthetics.” Digital Resource Foundation for the Orthotics and Prosthetics Community. 1992. http://www.oandplibrary.org/alp/. Accessed 2.22.2017. [3] M. Bellis. “A Brief History of Prosthetics.” About.com. http://inventors.about.com/od/timelines/fl/ABrief-History-of-Prosthetics.htm. Accessed 2.23.2017. [4] “The Hand.” beBionic. 2017. http://bebionic.com/the_hand. Accessed 2.23.2017. [5] E. Leuthardt. “Neuroprosthetics.” The Scientist. 11.1.2014. http://www.thescientist.com/?articles.view/articleNo/41324/title/Neuroprost hetics/. Accessed 1.9.2017. [6] E. Klein, J. Ojemann. “Informed consent in implantable BCI research: identification of research risks and recommendations for development of best practices.” IOP Science Journal of Neural Engineering. 6.1.2016. http://iopscience.iop.org/article/10.1088/17412560/13/4/043001/meta. Accessed 2.24.2017. [7] Y. Chi, T. Jung, et al. “Dry-Contact and Noncontact Biopotential Electrodes: Methodological Review.” 2010. ELECTROMYOGRAPHY: A SECOND CHANCE AT NORMAL Whether they lost a limb traumatically or were born without it, amputees lead a difficult life. Many suffer from depression, often require assistance with basic tasks, and 7 Joseph Sukinik Alexander Meek force.” IOP Science Journal of Neural Engineering. 8.22.2016. http://iopscience.iop.org/article/10.1088/17412560/13/5/056010/meta;jsessionid=83FDE47C4FA7DFF94 5E2677E9445819A.c1.iopscience.cld.iop.org. Accessed 2.26.2017. [20] “Mobius Bionics bringing DEKA’s LUKE prosthetic arm to market.” Today’s Medical Developments. 7.12.2016. http://www.todaysmedicaldevelopments.com/article/mobiusbionics-deka-luke-prosthetic-arm-dean-kamen-71216/. Accessed 2.26.2017. [21] “LUKE Arm.” MOBIUS bionics. http://www.mobiusbionics.com/the-luke-arm.html. Accessed 2.26.2017. [22] R. Boyle, B. Draxler. “DEKA “LUKE” ARM.” Popular Science. 2014. http://bestofwhatsnew.popsci.com/deka-lukearm. Accessed 2.26.2017. [23] N. Hines. “Mobius Bionic's LUKE Arm Is Straight Out of 'Star Wars'.” Inverse Innovation. 7.11.2016. https://www.inverse.com/article/18100-mobius-bionicsluke-sprosthetic-arm-commercially-available-approved-forsale-darpa. Accessed 2.26.2017. [24] B. Meyer. “Bertolt Meyer: 'Ethical questions are looming for prosthetics'.” Wired. 8.30.2013. http://www.wired.co.uk/article/now-we-need-to-talk-aboutour-bionic-future. Accessed 3.1.2017. [25] J. Niman. “Prosthetic Technology and Human Enhancement: Benefits, Concerns and Regulatory Schemes Pt3.” Institute for Ethics and Emerging Technologies. 5.9.2013. http://ieet.org/index.php/IEET/more/niman201305 09. Accessed 3.1.2017. [26] “Amputation and Depression.” LifeTips. http://disability.lifetips.com/tip/150808/amputee/amputee/a mputation-and-depression.html. Accessed 2.26.2017. [27] “Amputation Statistics.” Statistic Brain Research Institute. 9.2.2016. http://www.statisticbrain.com/amputeestatistics/. Accessed 2.26.2017. [28] “Depression Statistics.” Depression and Bipolar Support Alliance. 6.2005. http://www.dbsalliance.org/site/PageServer?pagename=educ ation_statistics_depression. Accessed 2.26.2017. http://www.isn.ucsd.edu/pubs/rbme10.pdf. Accessed 2.24.2017. [8] “Anatomy of the Brain.” American Association of Neurological Surgeons. 2006. http://www.aans.org/Patient%20Information/Conditions%20 and%20Treatments/Anatomy%20of%20the%20Brain.aspx. Accessed 2.25.2017. [9] S. Saddow. “Silicon Carbide Biotechnology: A Biocompatible Semiconductor for Advanced Biomedical Devices and Applications.” 2012. https://books.google.com/books?id=NLLr5vxm_MC&pg=PA283&lpg=PA283&dq=neural+reception+b y+interface&source=bl&ots=aRNoWG4h6l&sig=YcZc6ZR FCAybRUEZJptPAW0X47k&hl=en&sa=X&ved=0ahUKE wiCpo3Kh7jRAhWBhZAKHfacB5cQ6AEIHDAA#v=onep age&q=neural%20reception%20by%20interface&f=false. A ccessed 2.7.2017. [10] “Neurons, Brain Chemistry, and Neurotransmission.” National Institutes of Health. https://science.education.nih.gov/supplements/nih2/addiction /guide/lesson2-1.html. Accessed 2.24.2017. [11] “Neuron Anatomy.” Arizona State University. https://askabiologist.asu.edu/sites/default/files/resources/arti cles/neuron_anatomy.jpg. [12] “Synapses.” McGill University. http://thebrain.mcgill.ca/flash/i/i_01/i_01_m/i_01_m_ana/i_ 01_m_ana.html. Accessed 2.24.2017. [13] “Histology @Yale.” Yale University. http://medcell.med.yale.edu/histology/muscle_lab/neuromus cular_junction.php. Accessed 2.28.2017. [14] B. Hughes, L. Kusner, et al. “Molecular architecture of the neuromuscular junction.” National Institutes of Health. 4.2006. https://www.ncbi.nlm.nih.gov/pubmed/16228970. Accessed 2.24.2017. [15] J. Krans. “The Sliding Filament Theory of Muscle Contraction.” Nature. 2010. http://www.nature.com/scitable/topicpage/the-slidingfilament-theory-of-muscle-contraction-14567666. Accessed 2.25.2017. [16] J. Jeong, W. Yeo, et al. “Materials and Optimized Designs for Human-Machine Interfaces Via Epidermal Electronics.” Advanced Materials. 9.25.2013. http://onlinelibrary.wiley.com/doi/10.1002/adma.201301921 /full. Accessed 1.24.2017. [17] P. Shenoy. “Online Electromyographic Control of a Robotic Prosthesis.” Bioengineering Department. University of Washington. 3.2008. http://homes.cs.washington.edu/~rao/emg-08.pdf. Accessed 1.10.2017. [18] C. Dietrich, K. Walter-Walsh, et al. “Sensory feedback prosthesis reduces phantom limb pain: Proof of a principle.” ScienceDirect Neuroscience Letters. http://www.sciencedirect.com/science/article/pii/S03043940 11014807. Accessed 2.26.2017. [19] M. Schweisfurth, M. Markovic, et al. “Electrotactile EMG feedback improves the control of prosthesis grasping ADDITIONAL SOURCES B. Darnall, P. Ephraim, et al. “Depressive symptoms and mental health service utilization among persons with limb loss: Results of a national survey.” Science Direct. Archives of Physical Medicine and Rehabilitation. 4.2005. http://www.sciencedirect.com/science/article/pii/S00039993 04013164?np=y Accessed 1.9.2017 “Once more, with feeling.” The Economist. 10.11.2014. http://www.economist.com/news/science-andtechnology/21623580-artificial-limbs-feel-real-thing-aregetting-closer-once-more Accessed 1.9.2017. 8 Joseph Sukinik Alexander Meek H. Uliam Kuriki, F. Micolis de Azevedo, et al. “The Relationship Between Electromyography and Muscle Force.” Univ. Estadual Paulista. 2012. http://cdn.intechopen.com/pdfs/25852.pdf. Accessed 1.23.2017. ACKNOWLEDGMENTS We would like to thank our co-chair Mikayla Ferchaw for peer-reviewing our paper throughout the writing process and for providing critical feedback that guiding our writing efforts. We would also like to thank Janet Zellmann for providing extensive feedback on each of our submissions that helped shape our paper and grow as writers and engineers. We would also like to thank the members of Floor three Sutherland West for proof-reading and offering their support during the writing process. 9