Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Proprioception wikipedia , lookup
Optogenetics wikipedia , lookup
Multielectrode array wikipedia , lookup
Synaptogenesis wikipedia , lookup
Caridoid escape reaction wikipedia , lookup
Central pattern generator wikipedia , lookup
Neuroplasticity wikipedia , lookup
Synaptic gating wikipedia , lookup
Brain–computer interface wikipedia , lookup
Neural modeling fields wikipedia , lookup
Neuromuscular junction wikipedia , lookup
Embodied language processing wikipedia , lookup
Perceptual control theory wikipedia , lookup
Channelrhodopsin wikipedia , lookup
Muscle memory wikipedia , lookup
Neuroprosthetics wikipedia , lookup
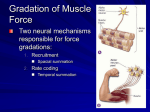
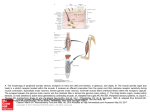
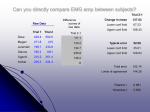
Physiopathology – Motor prostheses Prof. Gregor Rainer, Ph.D. Types of Motor prostheses Central control signals Cortical control of a prosthetic arm (invasive or non-invasive) Myoelectric (muscle) signals Re-wiring of motor neuron signals from lost limb through chest muscles The MANUS HAND uses EMG from arm to control robotic hand MANUS Hand - Overview Functionality by sharing control between user and automation Allows 4 different grasp types (~90% of hand use): cylindrical, precision, hook and lateral Autonomous Robots 16, 143–163, 2004 MANUS Hand - Control A single EMG channel is used to control the prosthetic hand. 3 levels of EMG amplitude input recognized: nonexistent, low, high. 3-bit “word” communicated to controller through sequence of 3 EMG bursts. In theory, 27 different commands can be sent (in practice, only 18) Example shown: sequence of low, high, low MANUS Hand - Conclusions In trials, users successfully able to learn command language and grasp objects Could be expanded to higher-level arm amputees due to low ratio of input EMG channels to active joints Non-intuitive control requires concentration, has high rejection rate in practice Although more active joints than commercial alternatives, motion is still limited by under-actuation Targeted muscle reinnervation - Overview Natural control of prosthetic limb while still using EMG as input by “rewiring” motor neurons to intact muscle. Denervate an “expendable” area of muscle, such as in the chest. Attach motor neurons from the amputated arm to different areas of the deinnervated chest muscles. Thinking about moving your arm will result in your chest muscles contracting and your robotic arm moving. Use surface electrodes over chest muscles to provide many channels of EMG control input to prosthetic. JAMA, February 11, 2009—Vol 301, No. 6 619 Targeted muscle reinnervation - Video Targeted muscle reinnervation - Conclusions Control of multiple joints simultaneously Natural-feeling, intuitive control compared to conventional EMG controlled prosthetics Invasive procedure, not guaranteed to work Still face challenge of interpreting EMG signals, must use classifier to select from subset of recognized motions Firing rate M1 neuron [Hz] Cortical motor control – Broadly tuned M1 neurons Arm movement direction Annu. Rev. Neurosci. 2004. 27:487–507 Cortical motor control – Population vector principle Cortical motor prosthesis - Overview doi: 10.3389/fneng.2010.00112 Cortical motor prosthesis - Video Signal types for decoding, LFP example movement onset Cortical motor prosthesis - Conclusions Allows (directional) control of computer cursor or robot arm. Performance varies depending on electrophysiological signal type. Cortical surgical procedure associated with risks. Ability of cortex to learn might be a considerable advantage. Variety of signals available for decoding with particular advantages / disadvantages.