Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Feature detection (nervous system) wikipedia , lookup
Artificial neural network wikipedia , lookup
Neuroeconomics wikipedia , lookup
Brain–computer interface wikipedia , lookup
Neurocomputational speech processing wikipedia , lookup
Proprioception wikipedia , lookup
Microneurography wikipedia , lookup
Neural oscillation wikipedia , lookup
Types of artificial neural networks wikipedia , lookup
Neural coding wikipedia , lookup
Cognitive neuroscience of music wikipedia , lookup
Recurrent neural network wikipedia , lookup
Nervous system network models wikipedia , lookup
Neural correlates of consciousness wikipedia , lookup
Neuropsychopharmacology wikipedia , lookup
Neural engineering wikipedia , lookup
Metastability in the brain wikipedia , lookup
Orbitofrontal cortex wikipedia , lookup
Optogenetics wikipedia , lookup
Embodied language processing wikipedia , lookup
Central pattern generator wikipedia , lookup
Development of the nervous system wikipedia , lookup
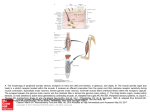
Inconvenient Truths about neural processing in primary motor cortex Stephen H. Scott J Physiol 586.5 (2008) Computational Intelligence Seminar C 21.1.2010 Robert Legenstein How does M1 contribute to the control of motor action? M1 plays an important role in volitional motor control • Largest contribution to corticospinal tract • Lesion studies Historical Overview of research directions: 1960s: Which parameters (muscle vs. movements) are coded in M1? 1970s: Motor Cortex is viewed as a servo‐controller. 1980s: A return to the questions of movement parameters and coding. Proposal: Shift to ideas of optimal feedback control (OFC). 1960s: Neuronal coding in M1 Ed Ewards (1968) Question: Do neurons in M1 reflect • Muscle activity (low‐level representation) or • Movements (high‐level representation)? Movement with loads (forces): • If load assists movement, less muscle activation is needed for some movement. • If load resists movement, more muscle activation is needed for the same movement. 1960s: Neuronal coding in M1 Therefore: Neurons that respond to movement and • The activity correlates with load ‐> are classified as muscle‐like • The activity does not correlate with load ‐> are classified as movement‐like. Result: • Roughly equal numbers of muscle‐like neurons and movement‐like neurons were found in M1. Mid 1970s: The motor system as a servo‐controller. Neural processing can correlate with several other features of movement including: • Joint position • Force output • Impending direction of movement Mid 1970s: Focus shifted to the question of how neural processing reflects aspects of control. The motor system is viewed as a servo‐ controller based on sensory feedback of the limb. Mid 1970s: The motor system as a servo‐controller. Role of M1: Converting differences between desired and actual joint angle into descending motor commands. An inconvenient truth for servo‐ control In the mid 1980s, the conceptual framework of servo‐control came to an abrupt end. The reason for this were studies on multi‐joint motor tasks. Behavioral level: Hand motion was found to be relatively simple with • straight hand trajectories and • bell‐shaped velocity profiles Mechanical level: Movements are influenced by intersegmental dynamics (muscle at one joint can generate movement at other joints) An inconvenient truth for servo‐ control Servo‐control of single joints could compensate, but • this is not possible with slow transmission of afferents (tens of msecs), leading to instabilities. The conclusion was that volitional motor control must make use of open‐loop motor commands. 1980s: Which variables are coded in the activity of M1 neurons? Framework: Sensorimotor transformations • The brain performs a series of sensorimotor transformations using intermediate representations or coordinate frames. Putative representations from target location to patterns of muscle activity . 1980s: Which variables are coded in the activity of M1 neurons? Intuitions: • “From complex to simple” as an inverse of the traditional hierarchical view on sensory systems “from simple to complex”. • Results of Georgopolous et al: Neurons are broadly tuned to the direction of hand movement. The direction of movement can be predicted by the “population vector method”. The hypothesis is thus that M1 is one stage of sensori‐ motor transformation which codes high‐level movement information. An inconvenient truth for sensorimotor transformations Neural correlates have been found for virtually every movement parameter examined such as • Spatial target location • Hand position • Hand velocity • Joint motion • Joint muscle activation Conclusion: M1 processes both high and low level information about motor action and everything in between. Inconvenient truth (2): Scaling with movement parameters Neuronal activity rarely scales linearly with parameters such as movement distance and speed. Mean firing rate for • fast (red) and • slow (green) reaches. Gray: Hand velocity and speed Inconvenient truth (3): representations and behavioral context Neural representations change across behavioral contexts. Neural activity recorded during • Constant arm posture • Reaching movements with – Flexor loads – Extensor loads – Null loads Many neurons changed their load sensitivity, in the extreme only responded to loads during reaching and not during posture or vice versa. Inconvenient truth (3): representations and behavioral context Example neuron responses. Linear fit of firing rate of on the two force parameters • during posture • during reaching Inconvenient truth (3): representations and behavioral context Thus: A neuron can reflect low‐level information (response to loads) during one behavior and then switch and code high‐level information during reaching. Conclusion: The further investigation of an M1 coordinate frame is questionable. Compare to the activities of hidden units in an artificial neural network. (Fetz, 1992). OFC as a conceptual framework of M1 processing Control theory provides new approaches for interpreting biological control. Optimal control theory: Derive control laws based on some cost function by optimization. Optimal feedback control (OFC): Computes control signals based on the current state of the system. OFC has recently been proposed as a theory of the volitional motor system (Todorov & Jordan, 2002) OFCs resolve the fatal problems of servo‐control The problem of sensory delays for feedback control is resolved through an optimal state estimator that combines • an efference copy of motor commands to rapidly estimate the state of the system (position, velocity, etc.) • with sensory feedback from the motor periphery and the visual system. OFC and neural processing in M1 OFC is consistent with aspects of neural processing in M1: • Neural activity correlates with high‐level and low‐level parameters of movement: This is expected for a region involved in using feedback for control. – Feedback from vision (high‐level parameters) – Proprioreceptive (low‐level parameters) – No single coordinate frame is needed • An OFC is designed based on the goals of a task, therefore – Neural response properties can change based on the task • Smooth straight trajectories can be generated without explicitly coding this parameter in the brain. The goal can be mapped directly into feedback control policies. OFC: A conceptual framework It is still explored how near‐optimal control can be generated from a hierarchically organized system like the CNS. OFC provides predictions about motor behavior, e.g. Movement variability in motor tasks OFC can explain movement variability in motor tasks (Todorov and Jordan, Nat Neurosci 2002) Behavioral goals are achieved reliably and repeatedly with movements rarely reproducible in their detail. The optimal strategy (w.r.t. OFC) under noisy conditions is to allow variability in redundant (task‐irrelevant) dimensions. Minimal intervention principle: Deviations from the average trajectory are corrected only when they interfere with task performance. Simple example task Consider the following one‐step control problem: • Given state variables x1, x2, • choose control signals u1, u2 • to minimize E[x1final+x2final‐X*]+r(u12+u22) • with stochastic dynamics xifinal = xi+ui(1+σεi) OFC can explain movement variability in motor tasks Subjects make planar arm movements through sequences of targets. Condition A: 5 targets Condition B: include 16 additional targets along average trajectory. How optimal feedback control can guide experiments How optimal feedback control can guide experiments on the neural basis of volitional motor control. • OFC highlights that the neural processes and not the neural codes should be addressed experimentally. Summary • The framework of sensorymotor transformation has been challanged by several findings: – Neurons in M1 code for many different high‐ and low‐level aspects of movement. – The coding properties of M1 neurons are context‐ dependent. • Optimal feedback control is consistent with theses findings. • Optimal feedback control can explain movement variability in motor tasks. It is proposed to shift the focus of investigation to ideas based on optimal feedback control.