Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Optogenetics wikipedia , lookup
Synaptogenesis wikipedia , lookup
Holonomic brain theory wikipedia , lookup
Metastability in the brain wikipedia , lookup
Binding problem wikipedia , lookup
Axon guidance wikipedia , lookup
Neuroplasticity wikipedia , lookup
Human brain wikipedia , lookup
Apical dendrite wikipedia , lookup
Neuropsychopharmacology wikipedia , lookup
Aging brain wikipedia , lookup
Cognitive neuroscience of music wikipedia , lookup
Problem solving wikipedia , lookup
Premovement neuronal activity wikipedia , lookup
Neuroanatomy wikipedia , lookup
Subventricular zone wikipedia , lookup
Development of the nervous system wikipedia , lookup
Feature detection (nervous system) wikipedia , lookup
Channelrhodopsin wikipedia , lookup
Motor cortex wikipedia , lookup
Cerebral cortex wikipedia , lookup
Motor learning through the combination of
primitives.
Mussa-Ivaldi & Bizzi
Phil.Trans. R. Soc. Lond. B 355:1755-1769.
Forward problems
a(t) = 1/m F(t) = G2(F(t))
v(t) = G1(v(t0), a(t))
x(t) = G0(x(t0), v(t))
q(t) = G(q(t0), (t))
x
v
a
F
time
Inverse problems
F(t) = G2-1(a(t))
G-1(q(t)) = (t)
x
v
a
F
time
A simple problem
D is the torque of the previous slide
Forward and Inverse Kinematics
Kinematics
The study of motion when only position and velocity
are considered.
Forward Kinematics
Position is specified by setting value for each DOF
Hard to achieve world space constraints
Movement flow (relatively) easy to control
Inverse Kinematics
Specify world space constraints that one or more
parts of the skeleton must achieve
Solve for joint angles to achieve these
Good for meeting world space constraints, but
movement flow can be a problem
Most skeletons are highly redundant, so problem is
underconstrained
Solutions based on feed-back
Should be
feedback
Is
real world
Solutions based on feedforward
Not the real world,
but solving the inverse problem
x
v
a
F
time
Memory based computations
Use the real world in previous behaviour,
i.e. learn and remember
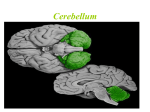
The cerebellum
The cerebellum ("little brain") has convolutions similar to those of cerebral
cortex, only the folds are much smaller. Like the cerebrum, the cerebellum has
an outer cortex, an inner white matter, and deep nuclei below the white matter.
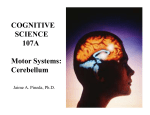
The cerebellum
If we enlarge a single fold of
cerebellum, or a folium, we
can begin to see the
organization of cell types. The
outermost layer of the cortex
is called the molecular layer,
and is nearly cell-free. Instead
it is occupied mostly by axons
and dendrites. The layer
below that is a monolayer of
large cells called Purkinje
cells, central players in the
circuitry of the cerebellum.
Below the Purkinje cells is a
dense layer of tiny neurons
called granule cells. Finally, in
the center of each folium is
the white matter, all of the
axons traveling into and out of
the folia. These cell types are
hooked together in
stereotypical ways throughout
the cerebellum.
Equilibrium-point hypothesis
Polat & Bizzi, 1979
Isometric force fields
Bizzi et al. 1991
Fiber tracts of the spinal cord
Evidence for internal models
Forward model:
• The transformation from
a motor command to the
consequent behaviour
• Predict the expected
outcome of a command
• Estimate the current
state inthe presence of
feedback delays
Inverse model:
• The transformation of the
desired behaviour to the
corresponding motor
command
Cortical primitives
Brain
Spinal cord solving
the inverse problem
(t) = G-1(q(t)) = S ci i(q(t))
Linear interaction
Potential modules
Simulating a composite movement