Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Signal transduction wikipedia , lookup
Cell growth wikipedia , lookup
Endomembrane system wikipedia , lookup
Cell membrane wikipedia , lookup
Extracellular matrix wikipedia , lookup
Tissue engineering wikipedia , lookup
Cell culture wikipedia , lookup
Cytokinesis wikipedia , lookup
Cellular differentiation wikipedia , lookup
Cell encapsulation wikipedia , lookup
List of types of proteins wikipedia , lookup
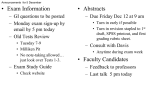
Department of Physics Seminar – 4. letnik Mechanical models of gastrulation Author: Peter Lukan Advisor: Assist. prof. dr. Primož Ziherl Ljubljana, June 2011 Abstract We present the phenomenon of gastrulation and two approaches that can be employed in its physical modelling. Gastrulation is the first significant event in the morphogenesis of animal and human embryos. In this phase the outlines of the digestive tract are formed. We examine the case of Drosophila melanogaster (fruit fly), where gastrulation occurs in the specific form of invagination, i.e. folding of a part of the epithelium in order to get a furrow on the ventral side of the embryo. The first approach presented models the embryo as a vesicular object with homogenous layers whereas the second one starts with the description of the dynamics of individual cells that form the epithelium. We expose the advantages and shortcomings of both approaches, mentioning also some alternative approaches employed to study invaginaton. 1 TABLE OF CONTENTS 1. INTRODUCTION 2. GASTRULATION IN DROSOPHILA 3. VESICLE MODEL 4. MONOLAYER EPITHELIUM MODEL 5. ALTERNATIVE APPROACHES 6. CONCLUSION 1. INTRODUCTION During the development of animal embryos one of the key events is the transformation of the blastula, a spherical cluster of stem cells, into the gastrula, a cluster of cells that acquires the outlines of the digestive tract. This phenomenon known as gastrulation is the first significant event in morphogenesis, the phase in which a series of processes that shape the embryo take place thus building up a body plan. Gastrulation is in fact the first large-scale morphogenetic movement in the embryo and is relatively simple. It can, at least from a human perspective, rightfully be called an event because the process itself happens relatively quickly, it is a matter of about 20 minutes, thus of the same time scale as human birth. Numerous studies have been carried out with the aim of getting a clearer insight into the mechanisms behind the process. None of them was carried out on human embryos for obvious ethical reasons, but gastrulation was observed in detail in the development of embryos of many animal species, for example frogs (Xenopus laevis), chickens, mice, zebrafish, to name a few vertebrates, and roundworms (Caenorhabditis elegans), sea urchins, and fruit flies (Drosophila melanogaster) to name some invertebrates [1,2]. One of the best-studied examples of morphogenesis is Drosophila melanogaster or fruit fly. The gastrulation phase in Drosophila differs from that of many other animal embryos in that its central event is the invagination of the mesoderm, the folding of a part of the epithelial layer in order to shape a furrow. The mechanism prevailing with other animal embryos (mammals in particular) is convergent extension and its modelling demands a different approach [1,2]. The main difference is that the Drosophila gastrula has an epithelium only one cell thick, whereas other embryos often have thicker gastrula walls. Morphogenesis used to be described mainly in terms of concepts of evolutionary biology. It was only during the past two decades that the effect of physical mechanisms on cells and tissues during gastrulation has been taken into account more seriously [3]. It is now widely acknowledged that cell and tissue mechanics play important roles in shaping the early embryo and that genes control embryonic mechanical properties and regulate cellular force production by driving certain chemical substances [1,4]. According to Ref. [5], epithelial mechanics can be studied in three ways. The first is the macroscopic approach, in which the epithelium layer is regarded as a homogenous sheet with elastic and bending rigidity. If we go one level lower, we can model the gastrula from the point of view of individual cells, that is as a non-homogenous sheet. The third approach is the microscopic one; it is known that the characteristic features of cells are due to molecular processes connected to cytoskeletal and other cellular proteins and this approach focuses on their dynamics [6]. Here we will not deal with the latter approach. The two approaches presented are the vesicle and the monolayer epithelium model. For the first one we will rely mainly on the article of Slovenian researchers Svetina, Derganc, and Božič [3], for the second one on Ref. [5-7]. 2. GASTRULATION IN DROSOPHILA The first event in Drosophila gastrulation is the formation of the ventral furrow. In this process part of the epithelium called the mesoderm folds in the inward direction, which is called the mesoderm invagination. We will give here a short description of the whole process in order to better understand the specifics of this process as with other animal embryos gastrulation is different. After the egg fertilisation the primary stem cell of the Drosophila does not divide by means of regular mitosis but only the nucleus starts splitting continually within the same primary cellular walls. This larger ellipsoidal cell-like structure with many nuclei is called the syncytium. After 13 cell divisions the number of cell nuclei rises to some 6000, the initial divisions occurring faster (10 to 25 minutes) than the later ones. This is so also because the later ones are common cell divisions; they take about 24 hours each to 2 complete [4]. Then, at nuclear division 14, cellularization takes place. In this process cell walls form around separate nuclei on the outer border of the syncytium, thus forming a monolayer epithelium. These first 14 divisions are shown schematically in Fig. 1. Figure 1: Division of nuclei (red dots) in a syncytium during the first 14 phases before gastrulation occurs. As can be seen, after division 7 the nuclei start to move towards the edge of the syncytium. During division 14 the nuclei on the edge become surrounded by cellular walls, which is called cellularization [4]. After having undergone cellularization, the Drosophila embryo is composed of a relatively uniform single layer of columnar epithelial cells, surrounded by a semi-hard shell composed of a rigid chorion and a vitelline membrane, which contains the yolk. Fig. 2 shows a scheme of the transversal cross-section of the Drosophila embryo. Figure 2: Scheme of the transversal cross-section of the Drosophila embryo. The blue surface denotes the part of the epithelial layer called ectoderm, the green surface denotes the mesoderm. If viewed from a transverse cross-section, the whole epithelial monolayer has about 80 cells, about 20 of these belonging to the mesoderm. The inner and outer surface of the epithelial layer are called basal and apical, respectively. The incompressible liquid contained within the epithelial membrane is the yolk (orange) and the semihard shell is the vitelline membrane (red line). The radius of the cross-section is approximately 40 μm [8]. The whole mesoderm consists of approximately 1200 cells (20 cells wide and 60 cells long) which undergo invagination. Fig. 3 shows the three stages of this process. Figure 3: Three phases of ventral furrow formation, during which the mesoderm folds in. The cells at the edges of the ventral furrow seal in order to form a closed tube of cells thus forming the outlines of the digestive tract [5]. During gastrulation, mitotic synchrony is lost and at least 25 distinct groups of cells can be identified based 3 on when they enter subsequent mitosis [4]. It has been observed that no nuclear or cell divisions occur during the invagination. This may be a direct consequence of cellularization, which decreases the division speed. The cells of the mesoderm go through three distinct phases during the ventral furrow formation. These are the apical flattening of cells, apical constriction (early wedging), and apical–basal shortening (some mention also early apical–basal lengthening preceding the shortening and basal expansion or late wedging) [5]. During apical flattening the apical cell surface decreases in area and the extent of cell–cell contact between neighbouring cells increases [4]. Fig. 4 shows the three main phases of invagination mentioned above. Figure 4: Drosophila ventral furrow formation. First, apical flattening takes place, during which the outer (apical) side of the epithelial cells flattens. Second, the apical sides of the epithelial cells constrict and the epithelium thus bends inwards. In the last phase the cells shorten in the radial direction, the epithelium becomes effectively thinner [4]. The transformations of epithelial cells are important in morphogenetic processes in general. The underlying mechanisms are based on chemical and structural properties of the cells that form the epithelial sheet. The shape change in cells has been experimentally found to be controlled by a cytoskeletal network made of myosin microfilaments and microtubules [7]. Morphogenesis can nevertheless be fully understood only if we take into account the mechanical properties of these sheets [1,4]. I have already mentioned convergent expansion, a mechanism which is in action during later phases of morphogenesis in Drosophila [9] and also during the gastrulation phase of other types of embryos. In this process the tissue of a soft network of cells expands by means of intercalation. This mechanism can work in a thick layer of epithelial cells, not a one-cell layer like in Drosophila. In the following we will present three physical models that approach the problem of the mechanics of the gastrula from two different starting points. The first model takes the blastula to be a vesicular object with a homogenous membrane and tries to infer its dynamics on this basis. The second one takes the blastula wall to be a non-homogenous monocellular epithelial layer composed of separate cells and investigates the properties of the latter. The third model starts from the same assumptions, the difference is that the latter makes a two dimensional model of the cells whereas the second model employs three dimensional model cells. 3. VESICLE MODEL In their article Božič et al. focus on the aspects of the mechanics of the blastula that are related to its laminar structure [3]. The blastula can be considered a vesicular object having a laminar structure because it has one or more layers of cells, of which the central one is a monocellular epithelial layer. Moreover, during the blastula-gastrula transition the cell cluster appears to acquire several shapes that are very similar to those 4 observed with simple vesicular systems [3]. As already mentioned, in Drosophila the blastula wall is a onecell thick epithelium but we have seen that there is also the semi-hard shell which affects the epithelial layer. A multilayer shaping of the vesicular object is thus still relevant for the furrow formation. Such modelling is independent of the structural and compositional features of the composing layers, thus it is not our concern here what the layers are really made of, we are interested only in their mechanical properties. The model is not meant to give a detailed explanation of what occurs during the gastrulation process in real embryos, but only to point out the basic problems that had to be resolved in the course of evolution to allow single-cell-thick sheets to transform into invaginated shapes. The in-plane elasticity of the layers can be described solely in terms of area expansitivity (compressibility) elastic deformational mode because they are in a liquid crystalline state, meaning that they do not display shear elasticity [3]. The mechanical properties of the constituent layers of the blastula are, in a first-order approximation, equivalent to those of simple membranes. The blastula shape transforms in order to adapt the intercellular forms in such a way that there is no significant development of shear stress within the layer. The deformational modes of a multi-layer closed membrane, whose layers are liquid-like and homogenous, can be described as follows. The deformational energy due to the change of area of the vesicular object is WA= 1 K A− A0 2 . 2 A0 (1) Here A is the area of the membrane, A0 is the area of the membrane in equilibrium, K is the net area expansitivity and is calculated as the sum of all the individual area expansitivity coefficients of the corresponding layers: K =∑ K i . (2) i The quadratic term means that the area elasticity energy will increase regardless if the membrane increases or decreases in area. The vesicular membrane is also characterized by a net bending constant kc and net spontaneous curvature C0. Again, the two are calculated from the individual values for each layer k c =∑ k ci , C 0=∑ C 0i . i i (3) The bending energy of the whole membrane is the integral over the membrane area A Wb= 1 k ∫ C 1C 2 −C 0 2 dA . 2 c (4) Here C1 and C2 are the principal curvatures, respectively. The two types of deformations are shown in Fig 5. Figure 5: Elastic deformation of the membrane. An elastic wall can bend and undergo at the same time a change of surface area while folding. Due to this change the area elastic energy and bending energy increase. In addition to these two types of energy of laminar membranes Božič et al. introduce another independent deformational mode called non-local bending [3]. This mode is related to the fact that the integral C of the two principal curvatures (C1 and C2) over the surface of the vesicular object does not give 5 the same value as does the integral of the spontaneous curvature C 0 . The latter would correspond to the shape of the vesicular object at which the sum of area expansitivity energies of all layers is minimal. The integral curvature C is defined as C = ∫ C 1C 2 dA . (5) The integral curvature C is thus a function of the geometry of the innermost and outermost sides of the vesicular object. In contrast to this, the spontaneous curvature integral C 0 is not only a function of the geometry. Its expression for a membrane with i layers is given in Ref. [3] as ∑ K i hi i C0 = ∑ i K i h2i . A0,i (6) The empirical parameters from which C 0 is calculated are the area expansitivity coefficients Ki of individual layers. Using the two types of integral curvatures the non-local bending energy is thus expressed as follows Wr = 1 kr C −C 0 2 . 2 A0 (7) Here A0 is the equilibrium area of the vesicle membrane and kr is the non-local bending constant. The latter differs from the net bending constant kc and must be calculated from the expansitivity moduli of individual layers Ki and the distances hi of individual membranes from their corresponding neutral surfaces A0i k r =∑ K i hi 2 . i (8) Note that the bending energy Wb is a function of the individual spontaneous curvatures C0i and individual empirically given bending constants kci whereas the non-local bending energy Wr is a function of the individual empirical parameters for area expansitivity Ki and individual deviations hi from the neutral surfaces A0i. The bending energy is thus calculated from the bending characteristics of the layers and is local in nature while the non-local bending energy is calculated from their elastic characteristics. To calculate the total energy of the layers we use reduced values. The reduced volume is v = V/VS, where VS is the volume of the sphere with area A, and the reduced integral vesicle curvature is c=C /C S , where CS = 8πRS is the integral vesicle curvature of a sphere with area A = 4πRS2. The other relevant parameters are the reduced spontaneous curvature c0 = C0RS, the reduced equilibrium integral vesicle curvature c 0=C 0 /C S , and the ratio of the two bending constants kr/kc. The shape of the vesicular object is determined by the minimum of the total elastic energy W total = W A W b W r W sur . (9) Here Wsur is the surface energy due to pressure differences between the inner and outer side of the vesicular object. This pressure difference is in fact the osmotic pressure due to the semi-permeable cellular membrane. A generalization of the equation of state gives the equilibrium of forces 2 kr 2K 2 A−A0 R S − k C −C 0 C 0 RS C−C 0 − p R2S = 0 A0 RS A0 (10) By drawing on earlier conclusions about the stability of spherical vesicular objects the authors of Ref. [3] have formulated the criterion for the stability of a spherical vesicle thus delimiting the region in the parameter phase space where spherical vesicular objects become unstable. 6 c0 − 2 kr p R3S c−c 0 − −60 . kc 2 kC (11) The two middle terms follow directly from the last two terms in Eq. (10). The first two terms represent the features of the vesicle and the third one represents the reduced pressure. We could interpret the inequality as suggesting that the difference in magnitude between the bending force and force due to non-local deformation should be smaller than the magnitude of the force due to pressure difference, although this statement is only vaguely appropriate. Figure 6 shows the parameter phase space and its division into the stable and unstable region for spherical vesicular objects. Figure 6: Stability of spherical vesicles. The dashed line represents the border of the instability region for spherical vesicular objects. Below it there is the region of stable spheres, above it the conditions are fulfilled in order for a metamorphosis of the spherical shape to occur. The material constants of the vesicular object that determine the boundary between the two regions are c0, c 0 , and the ratio kr/kc [3]. The energies and consequently shapes of a vesicular object depend on the values of its material parameters. By crossing the above stability line new vesicle shapes appear. The two most distinct shapes that figure in the model are oblate shapes, which display rotational and equatorial mirror symmetry (an example are blood cells), and cup shapes, which have only rotational symmetry (the invaginated gastrula belongs to the latter class). We can achieve the transition from symmetric oblate to cup shapes by decreasing either c0 or c 0 . This means that we decrease the spontaneous curvature of the layers by increasing the radius of the layers, therefore at the same time enlarging the vesicular object, or that we increase the distance hi from the neutral surface of a certain layer. The instability can occur also if the pressure decreases as can be seen in Fig. 6. The transition can be continuous or discontinuous, depending on the values of the reduced volume v and the ratio of two bending constants kr/kc, which roughly means the ratio of elastic versus bending characteristics of the vesicular object. The critical value of this ratio to discriminate between both types of transitions depends on the reduced volume as shown in Fig. 7. Figure 7: Dependence of the critical value of the ratio (kr/kc)cr on the reduced volume v is shown. The 7 closer we are to the volume of the sphere (v = 1) the larger is the ratio value. There is a divergence for v = 1, which means that the elastic features of the vesicular object prevail over the bending features in spheres [3]. At values for reduced volumes v that are typical of real gastrulas ordinary vesicular objects in the model undergo a discontinuous transition from oblate to cup shapes. The gastrulation process, on the other hand, is generally continuous so the difference in shapes reflects physical differences in their envelopes. An explanation of the observed continuous transition is that the cells need enough time to adapt their relative positions, which cannot be achieved during a discontinuous transition. The authors interpret the discontinuous transition as that with which the membrane bending energy depends uniquely on the reduced volume v and reduced integral vesicle curvature c . Both parameters have the value 1 when the vesicular object is spherical but their values decrease before the invagination process. This means that the critical ratio (kr/kc)cr becomes attainable, as can be seen from Fig. 7. It is important to note that v and c are controlled by two different cellular processes [3]. This is why it is possible for them to change values at different times, that is consecutively. A proposed description of the sequence of events is that first an instability occurs as a consequence of the decreased pressure difference, while the curvatures c and c remain stable. After that the curvature starts to increase (the average radium decreases) and the blastula starts to flatten and eventually becomes ellipsoidal. Then it undergoes the transition to a cup shape and the curvature decreases at constant volume v. This process is schematically shown in Fig. 8. Figure 8: Phase diagram v against c illustrates a possible mechanism of the invagination process (points 1 through 8). Between 1 and 3 the object remains axisymmetric oblate, when passing from 3 to 4 it undergoes a transition to a cup shape (L is the transition line). The transition is continuous where the line L is dashed and discontinuous where it is dotted. The ellipsoidal shapes appear after the pressure drops and the stability line is crossed when the curvature becomes big enough, which means that the gastrula flattens [3]. We can say that the blastula and gastrula shapes are two natural shapes, whose occurrence is satisfactorily described by this vesicular model in terms of the above two parameters. In order to determine what are the possible causes for invagination we need to consider the possible causes of changes of the two parameters. The reduced volume v = V/VS can decrease either at constant envelope area A0 due to loss of liquid or at constant volume due to an increase in the area of the blastula wall. The reduced integral curvature c can change due to a change of c0 or c 0 . The latter changes for example because of differential changes of the equilibrium areas of different layers that constitute the blastula wall. One such process could be the secretion of hygroscopic molecules into the apical lamina during gastrulation [3]. We can argue that the whole process is governed by the features of the blastula wall which are in turn governed by chemical processes but in doing so we cannot overlook the importance of osmotic pressure for the creation of unstable conditions. The microscopic mechanisms that lead to the observed macroscopic specifics of the blastula wall have still not been investigated in detail. 8 4. MONOLAYER EPITHELIUM MODEL In the monolayer epithelium model of the gastrula we treat each cell separately and deal with the movements and tensions present in individual cells. The epithelium is no longer regarded as homogenous. In this cellular approach intercellular adhesion and cell contractility are the main mechanisms that affect the shape of the blastula. We will take a look at two physical models; the first one is three-dimensional [6] and the second one two-dimensional [5]. The use of surface mechanics is justified in cells that have flat sides without any noticeable undulations [6]. An experiment presented in Ref. [2] showed that a layer of active cells, which had been taken from a frog embryo, underwent gastrulation regardless of the absence of any plausible lateral anisotropy of the substrate or the culture medium. This suggests that the process may be collective in nature and induced basically by the cell-cell interactions [2]. 4. a) Three-dimensional model Generally, epithelial cells have prismatic shapes with polygonal bases. To calculate the macroscopic properties of the epithelium we introduce a three-dimensional model cell, which has a cylindrical shape, as can be seen in Fig. 9. We do so because we want to define the average cell in a uniform way, whereas the polygonal cells may have various shapes. We can assume that the volume of cells remains constant and consequently the same holds also for the volume of the whole epithelial layer. Figure 9: Monolayer epithelium. Model cells are taken to be on average cylindrical objects (A) undergoing different mechanical deformations. The top and bottom sides are the apical and basal side of the cell, respectively, whereas the side face is the lateral cell side. The cell can flatten due to vertically directed pressures on the apical and basal sides, which in turn extend while the height diminishes (B). The deformation of the average cell due to shear forces in the epithelial plane gives us an elliptical prism (C). If the layer bends, we get an isotropic shape, a truncated cone (D). In (E) we see the case in which the apical and basal plane have different curvatures, the major axes of both planes are perpendicular [6]. It is worth taking a closer look at the most complicated of the above deformations, namely the one shown in Fig. 9E. A cross-section view of this deformation can be seen in Fig. 10. Figure 10: Deformation of the body in Figure 8E from two perpendicular lateral sides (panel A). The 9 dimensions of the apical and basal plane are really the two axes of the ellipse (panel B). We can also note that the neutral plane is not identical to the midplane of the cell, the former being moved slightly in the direction of the apical plane (panel A) [6]. It is thus possible to describe the cellular level in terms of cellular surface mechanics and intercellular adhesion energy in the following way W cell = A A AB A L AB −A A − 1 AL . 2 (12) Here AA, AB, AL are the areas of the apical, basal and lateral surface of the cell, respectively, σ is the cellular cortical tension, η describes the possible asymmetry between the surface energies of the apical and basal side, γ is the intercellular adhesion constant; all three have the same units. We can see that the last term is negative, which is in accordance with the fact that cell-cell adhesion is favoured. The total mechanical energy of the epithelium is the sum of the energy of all model cells. We shall rewrite Eq. (12) in a dimensionless form. We introduce the following dimensionless quantities based on the perimeter of the unit model cell RC and the cellular cortical tension σ: 2 2 2 a A = A A / RC , a B = AB / RC , a C = AC / RC are the reduced areas of the apical, basal and lateral surface of the cell, respectively, =/ is the reduced intercellular adhesion constant, =/ is the reduced deviation of the apical cortical tension from the basal cortical tension. By doing so we obtain dimensionless energy 1 w=a Aa Ba L − a L a B −a A . 2 (13) The equation reveals to us that the energy is dependent only on two empirical parameters, namely and . We must minimize the energy taking into account the constraint of the fixed cell volume. Such a calculation was done for different shapes of cells. The most important parameter that influences the macroscopic features of the blastula is the ratio γ/σ between the intercellular adhesion and the cellular cortical tension. When the ratio increases, this means that the adhesion becomes stronger and the epithelial cells elongate radially. When the ratio decreases, the cells acquire a cuboidal (e.g., cylindrical with a square cross-section) shape which has the minimal reduced area at a given constant volume of all prismatic bodies. The ratio has been found to be between 0.37 < γ/σ < 2 [6]. When it exceeds the upper limit, the cellular height diverges while the mean area of the cell shrinks toward zero as can be seen in Fig. 11. Figure 11: Dependence of the relative in-plane surface area on the ratio γ/σ (panel A). For γ/σ → 2, the area goes toward 0, at the same time the cells elongate in the vertical direction toward infinity, as shown in panel B [6]. Below the lower limit γ/σ = 0.37 it becomes more energetically favorable for the cells to form separate spherical units than to cluster together [6]. The height-to-width ratio is greater than 1 for all ratios γ/σ, which means that the cells cannot be totally flattened as a consequence of the intercellular adhesion and cellular cortical tension. Where radical flattening is observed, it must be caused by some other stronger mechanism. According to this model the mechanism for the blastula transformation is based on the ratio of the intercellular adhesion and the cellular cortical tension and the changes of the two are chemically induced. 10 This model shows at least that cellular mechanics is able to explain cellular transformations due to changes in the interactions between cells. The authors further try to link this cellular model to the vesicular homogenous sheet model and derive the macroscopic parameters from σ, η, and γ [6]. They envision two types of tensions which in turn cause two types of mutually independent lateral deformations and two types of bending deformations; this independence can be assured if we define an appropriate neutral plane of epithelial layer. T he four corresponding elastic deformation moduli can be calculated from the changes of the cellular mechanical energy around the equilibrium state of model cells (more precisely, from the changes of the areas AA, AB, and AL). The epithelial area expansivity modulus K from Eq. (1), for example, is directly proportional to the cellular cortical tension σ, and that the in-plane shear modulus is one half of the area expansivity modulus K. This relation is typical for two-dimensional isotropic materials [6]. 4. b) Two-dimensional model There have been also other attempts to describe the mechanics of the monocellular epithelium starting from the cell level. In Ref. [7] the cells are basically modelled from a 2-dimensional perspective in the cross-sectional plane of the blastula. The so called finite element approach is employed, in which the basic elements that undergo shape transformations do not necessarily correspond to cross-sections of cells. These elements, which are in our case tetragons, may be just parts that make up the cross-section of a cell or even of two cells together (see Fig. 12 a). A division of forces into active and passive (elastic) is introduced; the former perform work, the latter are dissipative in nature but dissipation is not taken into account in this model. All finite elements in the model are subjected to one or both of the two empirically observed active shape changes: Apical constriction (or wedging) and radial (apical–basal) lengthening or shortening. The deformation gradient tensor F is decomposed into a product according to this division of deformations as F = FeFa. Moreover, we discern the deformations of the ectodermal and the mesodermal cells and active shape changes are independently applied to each of the two groups. The material is taken to be incompressible throughout the cells and that is why the yolk (see Fig. 2) is modelled simply as a constraint for the non-variable volume. Figure 12 shows a scheme of the active deformation process. Figure 12: 2D finite-element model: Initial finite elements (a) are first mapped into a common domain ξ (Jξ) and only then the apical constriction transformation and the elongation (Ja) are performed on individual elements (b). Then the elements are assembled together again (Jξ-1), at which point some overlaps may arise (c). After applying also the elastic deformations (Fe) the elements are put into order [7]. The two active deformation tensors are given as follows J ac = [ 12 ac 1 ac 0 0 1 0 0 0 1 11 ] (15) J el = [ 1 el 0 0 ] 0 0 1 0 1 el 0 1 . (16) ac and el Here ξ1 and ξ2 are the first two coordinates in the common parametric domain ξ = (ξ1, ξ2, ξ3), are two parameters used to implement the intensity of each active deformation. As already stated, we apply changes of shape to the ectodermal and mesodermal domain independently, which is schematically presented in Fig. 13. Figure 13: Ectodermal and mesodermal deformation. After being mapped into the common parameter domain ξ (a), the ectodermal finite elements undergo cell elongation (b), the mesodermal ones in addition to that previously undergo also apical constriction (c). They are all assembled together with the elastic deformation tensor Fe and mapped into the initial domain with Jξ-1 (e) [7]. The deformations simulation can thus be fully characterized by the vector , , = where the components represent the active shape factors of ectodermal elongation, mesodermal elongation, and mesodermal apical constriction, respectively. A linear dependence of active shape factors on the parametric time τ is assumed. After performing active deformations, mechanical equilibrium is obtained by minimizing the integral of the following elastic energy function E el in M el each M ac F e = ln det F e 2 tr F e T F e −3− lndet F e . 2 2 (17) Here λ and μ are the Lamé constants, their values were taken to be λ = 577 Nm-2 and μ = 384 Nm-2 (both from experiments) [7]. The second term is the elastic energy due to an increase in the finite element volume, the first term is due to shear stresses. The third term represents an energy penalty in the case of violation of the incompressibility constraint. The final equilibrium is dependent on the elastic deformation tensor Fe, which is needed to relax the system. Because the states in the ω space are path-independent, the length of the active deformation vector ω is kept constant (|ω| = 1) and the changes can be represented in a spherical unit space [7], which is also displayed in Fig. 14; the states lie on the surface of a sphere. 12 Figure 14: Panels (a) through (e) display the modelled phases of ventral furrow formation. The sphere (f) represents the ω unit space. Node A represents deformations with pure mesodermal shortening, node C pure mesodermal lengthening, node B pure ectodermal shortening, and node D pure mesodermal wedging. In the grey parts of the ω space invagination does not occur [7]. The criteria for successful invagination in the model were an inward (not outward) folding of the epithelium, non-violation of the impenetrability of matter, and the self-contact of two initially distant cells. If any of the three was not satisfied, the conclusion was that invagination did not occur. As τ increases, the values of ω vary until a successful invagination takes place or else the simulation stops. The onset of the three active deformations can be delayed relative to each other and in such a way different phenotypic trends can be assessed. It was found that there is a large region on the ω sphere in which a combination of all three shape changes leads to successful invagination. Moreover, an interesting result emerged, which shows that there is only one shape change that can cause invagination on its own, and this is ectodermal shortening. It was also found that in most cases a greater component of mesodermal wedging causes a more spherical furrow and a greater component of ectodermal shortening causes a more elongated furrow. The model allows us to investigate robustness and redundancy of the combinations of active shape changes. We can say that invagination mechanisms involving several active shape changes are more robust to mutational and environmental perturbation because if one of the mechanisms is partially or wholly disabled, there are greater chances for the organism to perform invagination despite the changes. An exception would be the total deterring of ectodermal shortening, in which case the process would fail. This model does not take into account any surface stress and viscous forces, although experiments show that epithelium cells exhibit some degree of viscous stress [7]. These and other dissipative forces arise after longer times during morphogenesis. In other words, the elastic system presented is conservative but this should not prevent us from exploring its robustness properties. The origin of the active shaping forces and the path dependence of the process are not an object of investigation in this model. 5. ALTERNATIVE APPROACHES It may be worth mentioning that there are also other approaches to the study of epithelial invagination. One such approach is presented in Ref. [8] and uses the technique of video force microscopy. Another approach, presented in Ref. [10], is three-dimensional fluorescence microscopy. Both of them are alternative in the sense that the models they produce are not theoretically developed numerical models but are rather dynamical models based on the monitoring of the kinematics of the invagination process. The forces and stresses are calculated from the movements of the epithelium. Such models are entirely descriptive, they do not give a theoretical explanation but rather employ just as much theory as is needed to obtain a picture of the active forces. In the video force microscopy approach the invagination process is recorded and the images are then processed. First, several reference points are distributed onto the image of the transversal cross-section of the blastula, mainly onto cell junctions sites, and then their movements are observed. From the movements of the 13 reference points and the shape of the blastula the forces needed for such movements are calculated. Figure 15 shows the computed stresses that act during invagination. Figure 15: Stresses during invagination. The images are taken 4.5 minutes apart, the whole process lasting 22.5 minutes. In the left column there are the images of the cross-section of the blastula, the right column is the reconstruction of the stresses that are present during each stage. Strong stresses are coloured orange and red, weak stresses are coloured yellow and green. It is evident that greater stresses must appear on the apical side of the mesoderm (apical constriction), whereas the stresses on the basal side of the ectoderm are more or less constant. Ectodermal pushing is also visible [8]. Video force microscopy revealed that greater stresses on the apical side of the mesoderm are necessary in order for invagination to take place. Moreover, also increased forces in the radial direction in the ectoderm appear. It has been argued [7] that this latter could also be crucial for a successful transformation. The technique of three-dimensional fluorescence microscopy uses a fluorescent medium in order to track the movements of cell walls and cell nuclei. This approach has shown that the nuclei move to the basal side of the cells before the latter change shape, which suggests that the nuclei movements could be the trigger for the invagination [10]. The authors also argue that the process starts randomly without any structural preferences of the epithelium about where to invaginate. 6. CONCLUSION We have explored two distinct approaches to the physical modelling of the invagination process as can be observed during the morphogenesis in Drosophila. Both are based on the conviction that cell shape change is the driving force behind many of the morphogenetic movements that occur during gastrulation and that genetic and chemical processes are not the only key factors to understand the process. In the first approach the blastula was modelled as a vesicular object in the second one as a monocellular epithelium. All three models understood the blastula transformation to be a collective process despite the fact that the latter two described the dynamics of separate cells. Another study [9] led to the conclusion that even though each cell behaves in an autonomous manner, changing shape to satisfy its own 14 internal stress-state requirements, a coordinated global morphogenetic movement is accomplished. In Table 1 we have a condensed comparison of the three models presented. 3D constraints Shear elasticity Dissipation Osmotic pressure Main result VESICLE + – – + Gastrulation with global mechanics 2D EPITHELIAL – + – + Possible force mechanisms 3D EPITHELIAL + + – – Mechanics from adhesion features Table 1: Comparison of models with respect to some important features. Some authors [1] stress the importance of taking into account three-dimensional constraints. In our case the 2D epithelial model does not include them but resorts to energy penalties. Shear elasticity is neglected in the vesicle model whereas the 3D epithelial model does not pay any attention to osmotic pressure although it does not explicitly exclude it. None of the three models takes into account dissipative effects. Whether embryonic tissues behave as a viscous fluid or as an elastic solid is a matter still under debate but for a thorough study of the the developmental phases of the blastula also dissipative forces should be included [5]. The main result of the vesicle model is that it shows that the shapes that occur during gastrulation can be explained with continuum mechanics and are possible natural forms of bigger objects in specific conditions. The 3D epithelial model shows the link between cellular adhesion mechanics and the global behaviour of the cell wall thus stressing the importance of chemical properties for mechanical behaviour. The 2D epithelial model focuses on the types of active shape transformation in order to find which mechanisms are predominant. The forces in it are understood to be independent of one another, which also video force microscopy seems to suggest [8]. The result shows that there are more configurations of forces that favour successful invagination, ectodermal shortening being stressed as the necessary condition for the invagination. Video force microscopy seems to confirm this, although it stresses mesodermal apical constriction to be the indispensable condition for invagination [8]. None of the authors claim their model to be an exhaustive explanation of what really happens during invagination, they are meant to be investigations into certain properties of the process. The approaches do not contradict each other but rather complement each other displaying different aspects of the same process. 7. LITERATURE [1] L. A. Davidson, S. D. Joshi, H. Y. Kim, M. von Dassow, L. Zhang, and J. Zhou, J. Biomech. 43, 63 (2010). [2] M. Zajac, G. L. Jones, and J. A. Glazier, Phys. Rev. Let. 85, 2022 (2000). [3] B. Božič, J. Derganc, and S. Svetina, Int. J. Dev. Biol. 50, 143 (2006). [4] U. Tram, B. Riggs, and W. Sullivan, Encyclopedia of Life Sciences (Macmillan Publishers Ltd, Nature Publishing Group, 2002). [5] J. Derganc, S. Svetina, and B.Žekš, J. Theor. Biol. 260, 333 (2009). [6] J. J. Muñoz, V. Conte, and M. Miodownik, Biomech Model Mechanobiol (2010). [7] V. Conte, J. J. Muñoz, B. Baum, and M. Miodownik, Phys. Biol. 6, 1 (2009). [8] G. W. Brodland, V. Conte, P. G. Cranston, J. Veldhuis, S. Narasimhan, M. S. Hutson, A. Jacinto, F. Ulrich, B. Baum, and M. Miodownik, Proc. Nat. Acad. Sci. USA (2010) [9] M. Rauzi, P. Verant, T. Lecuit, and P.-F. Lenne, Nat. Cell Biol. 10, 1041 (2008). [10] Z. Kam, J. S. Minden, D. A. Agard, J. W. Sedat, and M. Leptin, Development 112, 365 (2009). 15