Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Embodied cognitive science wikipedia , lookup
Eshkol-Wachman movement notation wikipedia , lookup
Antisymmetry wikipedia , lookup
Cognitive neuroscience of music wikipedia , lookup
Barbara Landau wikipedia , lookup
Central pattern generator wikipedia , lookup
Perceptual control theory wikipedia , lookup
Premovement neuronal activity wikipedia , lookup
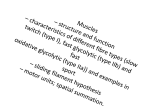
Motor control Importance of motor control • All of the “cognition” that we’re interested in must end in behavior— movement. • Brain terrain – Where is it/where do I want it to be? – What do I want to do with it? – Get the body to move it. Cortical motor structures Motor Eye movements Planning somatosensation Spatial stuff for movement Abstract Planning Hierarchy: planning & execution Planning Execution Comparison of motor planning and execution Planning AND Execution Comparison of motor planning and execution Execution but minimal planning Comparison of motor planning and execution Planning but no execution Can lower level of hierarchy operate without the higher? The ability can be impressive 2 types of control • Stuff that your body is ready to do such as reflexes, & biases to the system • Planned control (which can usually overcome these biases, if necessary) • Movement is usually a product of both Demonstration of biases • Fingers—move in phase • Hands move in phase NOTE that this implies that control is about trajectories You get these oddities because you have biases in the trajectories of movements Evidence for trajectories Monkey must move two jointed arm to a lighted target A single neuron Summary of many neurons Each line = 1 neuron: direction = preferred direction length = vigor of firing Summary These data indicate that movement is coded in terms of directions. But other data indicate it is in terms of endpoints Polit & Bizzi Traditional models More recent model Trajectory (space) Endpoint (muscle) Sequencing Hierarchical representation of action sequence • Complex actions – Serving a tennis ball – Playing the piano • Are these actions simply constructed by linking independent movements? Or are they guided by hierarchical representational structures that govern the entire sequence? Serve toss hit Cognitive Follow through Muscle actions Hierarchical representation of action sequence • Some aspects of motor learning are independent of the muscular system used to perform the actions. • Motor representations are not linked to particular effector systems. • Handwriting example. Hierarchical representation of action sequence • Peter Vidman Olympic gymnast said: • “As I approach the apparatus…the only thing I am thinking about is…the first trick…. Then, my body takes over and hopefully everything becomes automatic….” Just go. . . . Pete Sampras, not serving Perceptual motor integration Can you just “run” one of these programs? Or do you need perceptual feedback as you go? Peripheral control of movement and the role of feedback Perceptual motor integration Some simple movements can be made without feedback, but usually the movement is much more effective with feedback. Think of walking down a hallway with your eyes closed. Try writing your name with your eyes closed Perceptual motor integration Proprioception--feeling from skin, joint receptors, and muscle receptors, that tells you where your limbs are. Proprioception is important because knowledge of limbs location is important for egocentric space. Motor skill learning Fitts’s stage theory Schmidt’s schema theory Willingham’s COBALT Fitts’s stage theory Cognitive--conscious, think of rules, basic strategies Associative--unconscious, hook up of stim & resp Autonomous--stim & resp are well represented, and verbal representation drops out. Schmidt’s schema theory Generalized motor program: one that can produce a whole class of movements; e.g., swinging a bat, swinging a racquet, throwing a ball. Analogy: regression 100 80 60 40 20 0 0 2 4 6 8 A rm positi on 10 Advantage of theory: it can account for the flexibility of motor behaviors. Disadvantage: the data to support it aren’t that strong. COBALT COntrol BAsed Learning Theory Basic premise: motor skill grows directly out of processes that support motor control. Where is it/where do I want it to be? (perceptual-motor integration, sequencing) What do I want to do with it? (strategic) Get the body to move it. (dynamic) Strategic: deciding what to do Perceptual-motor integration: selecting spatial targets Sequencing: assembling the sequence of spatial targets Dynamic: translating targets into pattern of muscle movements. In addition, there are two modes in which movements can be expressed: conscious & unconscious. Strategic process Goal to change the environment Select spatial target for movement Assemble sequence of spatial targets Pattern of muscle activation Strategic process Goal to change the environment Select spatial target for movement Assemble sequence of spatial targets Pattern of muscle activation What makes this model different • It is a neuropsych model, with proposals for the neural bases of all of these processes • It emphasizes that conscious knowledge can be useful at any time during training, not just early. • Automaticity occurs through the parallel development of conscious & unconscious knowledge. • Accounts for choking.