Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Climate change mitigation wikipedia , lookup
German Climate Action Plan 2050 wikipedia , lookup
Climate governance wikipedia , lookup
Surveys of scientists' views on climate change wikipedia , lookup
Global warming hiatus wikipedia , lookup
Effects of global warming on human health wikipedia , lookup
Attribution of recent climate change wikipedia , lookup
2009 United Nations Climate Change Conference wikipedia , lookup
Public opinion on global warming wikipedia , lookup
Climate change, industry and society wikipedia , lookup
Climate sensitivity wikipedia , lookup
Global warming wikipedia , lookup
Solar radiation management wikipedia , lookup
Climate change in the United States wikipedia , lookup
Carbon pricing in Australia wikipedia , lookup
Climate change and poverty wikipedia , lookup
Low-carbon economy wikipedia , lookup
General circulation model wikipedia , lookup
Climate change in New Zealand wikipedia , lookup
Mitigation of global warming in Australia wikipedia , lookup
Climate change in Canada wikipedia , lookup
Years of Living Dangerously wikipedia , lookup
Effects of global warming on Australia wikipedia , lookup
Economics of global warming wikipedia , lookup
Economics of climate change mitigation wikipedia , lookup
Climate engineering wikipedia , lookup
Politics of global warming wikipedia , lookup
Instrumental temperature record wikipedia , lookup
Citizens' Climate Lobby wikipedia , lookup
Carbon emission trading wikipedia , lookup
Business action on climate change wikipedia , lookup
Climate change feedback wikipedia , lookup
Playing the Climate Dominoes:
Tipping Points and the Cost of Delaying Policy
Derek Lemoinea & Christian P. Traegerb
a
b
Department of Economics, University of Arizona
Department of Agricultural and Resource Economics, University of California Berkeley
Abstract: Greenhouse gas emissions can trigger irreversible regime shifts in the climate system, known as tipping points. Multiple tipping points affect each other’s
probability of occurrence (a “domino effect”) and they reinforce each other’s economic impacts. Today’s optimal mitigation policy has to consider all possible future
interactions between tipping points, economic activity, and policy responses over long
time horizons. We find that the presence of three commonly discussed tipping points
nearly doubles the currently optimal carbon tax, reducing peak warming along the
optimal path by approximately 1 degree Celsius. Our study also provides the first
quantification of the expected cost of delaying optimal policy in the face of tipping
points, which is comparable to the annual output of several large nations. This novel
assessment of the policy implications of tipping points bridges the increasingly severe
divide between scientific concerns about abrupt climate change and economic analyses.
Furthermore, we demonstrate that even the recognition of an already-triggered tipping
point can have substantial economic value, complementing the scientific literature’s
focus on the recognition of early warning signals.
1
Introduction
The threat of climate tipping points plays a major role in calls for aggressive emission reductions
to limit warming to 2 degrees Celsius [1, 2, 3, 4]. The few preceding quantitative economic studies
analyze optimal policy in the presence of a single type of tipping point that directly affects economic
output [5, 6, 7] or in the presence of a single tipping point that modifies either the carbon cycle
or the climate’s sensitivity to emissions [8]. However, climate scientists have become particularly
concerned with a possible “domino effect” arising through interactions among tipping points [9,
10, 11, 12, 13]. For instance, reducing the effectiveness of carbon sinks amplifies future warming,
which in turn makes further tipping points more likely. Here, we solve for the optimal policy under
interacting tipping points in a stochastic integrated assessment model with anticipated Bayesian
2 MODEL
2
learning. Optimality means that resources within and across periods are distributed to maximize the
expected stream of global welfare from economic consumption over time under different risk states.
The anticipation of learning acknowledges that future policymakers will have new information
about the location of temperature thresholds and can also react to any tipping points that may
have already occurred. We then calculate the welfare cost of delaying optimal climate policy.
2
Model
We integrate three tipping points into the DICE integrated assessment model [14, 15]. DICE
combines an economic growth model with a simplified climate module (Schematic 1, left). The policymaker decides how to allocate output between consumption, investment in capital, and emission
reductions. Unabated emissions accumulate in the atmosphere where they change the radiative balance, induce further warming feedbacks, increase global average surface temperature, and thereby
cause economic damages. In addition to integrating tipping points, uncertainty, and learning, we
also modify DICE’s damage relationship to avoid double-counting: around half of DICE’s damages
arise from an ad hoc adjustment meant to reflect the unmodeled possibility of tipping points [15],
and we eliminate this adjustment in our setting with explicit tipping points.
The bold arrows in Figure 1’s left schematic illustrate how our tipping points alter the climate
system. The first tipping point (a) makes temperature more sensitive to CO2 emissions. It reflects
the possibility that warming mobilizes large methane stores locked in permafrost and in shallow
ocean clathrates [18, 19, 20, 21]. It also reflects the possibility that land ice sheets begin to retreat on
decadal timescales: the resulting loss of reflective ice could double the long-term warming predicted
by models that hold land ice sheets fixed [1]. DICE characterizes the temperature response to CO2
through a climate sensitivity parameter that represents the equilibrium warming from doubling
CO2 . The value of 3◦ C used in DICE is inferred from climate models that hold land ice sheets and
most methane stocks constant. We represent a climate feedback tipping point as increasing climate
sensitivity to 5◦ C.
The second tipping point (b) increases the residence time of atmospheric CO2 . Warminginduced changes in oceans [22], soil carbon dynamics [23], and standing biomass [24] could affect the
uptake of CO2 from the atmosphere. We represent such a weakening of carbon sinks as reducing the
rate of atmospheric CO2 removal by 50%. The third tipping point (c) directly affects the economic
damage function. This damage function encapsulates all impacts from warming, including damages
from sea level rise, from habitat loss, and from a weakening of the Atlantic conveyor belt (Gulf
Stream). Any of these channels is subject to potential abrupt changes that would cause substantial
economic damages. For example, if the West Antarctic or Greenland ice sheets collapsed, sea levels
3
2 MODEL
Ancipates future observaon, updated prior, opmal consumpon and policy responses
b
No Tipping
CO2
Forcing
a
No Tipping
Aerosols and
non-CO2 gases
Safe domain expands
Temp
CO2
Tipping
Feedback
New Emissions
Consumpon
Capital
Investment
Dynamics change irreversibly
Other Tipping Scenarios …
Safe domain expands
Emissions
Temperature
c
Temp t
Consump on
New Emissions
Abatement
Output
Capital
No Tipping
CO2 t
CO2 t+1
Tipping
Feedback
New Emissions
Capital
Consumpon
Investment
Consumpon
U lity
Capital t
Investment
Safe domain expands
Temp
CO2
Tipping
Carbon
Cycle
Dynamics change irreversibly
Other Tipping Scenarios …
Dynamics change irreversibly
Capital t+1
Other Tipping Scenarios …
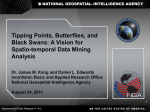
Figure 1: Left: A simplified schematic of our DICE-based integrated assessment model. Unabated emissions
from economic production accumulate in the atmosphere. Together with other greenhouse gases, the emission
stock changes the energy balance of the planet, induces various feedback processes, and increases global
surface temperature. The bold arrows indicate the relationship changed by each of the warming feedback
(a), carbon sink (b), and damage (c) tipping points described in the main text. Right: Schematic illustrating
the decision problem underlying the optimal policy choice. The policymaker anticipates that (i) a tipping
point might happen, (ii) future policymakers learn about the location of temperature thresholds by observing
whether past warming triggered a tipping point, (iii) future policymakers adjust to the new climate dynamics
in case of tipping, and (iv) these adjustments and their consumption and welfare effects depend on the climate
and capital passed on to the future policymakers.
could rise quickly and dramatically [25, 26, 27, 28]. These higher sea levels would interact with the
existing pathways by which warming causes damages. By stressing adaptive capacity, higher sea
levels make damages increase faster with warming. We model such a tipping point as changing the
DICE damage function from the conventional assumption of a quadratic in temperature to a cubic
in temperature: if this tipping point occurs, then doubling man-made warming increases damages
eightfold rather than fourfold.
Tipping points make the policymaker uncertain about future climate dynamics and their economic impact. We employ a recursive, stochastic, dynamic programming implementation of DICE
following and extending the approach of [29, 30, 31, 8]. Solving a model with three interacting
tipping points requires the solution of eight nested dynamic programming problems representing
the different combinations in which tipping points might possibly occur. Moreover, these tipping
points can occur at different times, at different environmental or economics states, and in different
orders. Today’s optimal policy has to foresee all of these possibilities and anticipate how they affect
future welfare, which in turn depends on how future policy responds to tipping at a given time and
state (Figure 1, right schematic). In particular, the future abatement policy affects how warming
and damages evolve within a given climate regime and also the probability of triggering further
3 OPTIMAL POLICY
4
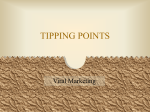
Figure 2: Optimal carbon tax in the years 2015 and 2050, assuming no tipping point has yet occurred. The
columns plot scenarios without any possible tipping points, scenarios with a single possible tipping point,
scenarios with two possible tipping points, and scenarios with three possible tipping points. The upper end of
each bar states the optimal carbon tax, and the length of the bar gives the (average) contribution of adding
the last tipping point (the lower end of the bar corresponds to the average optimal tax when eliminating one
of the noted tipping points). The horizontal lines show the average carbon tax among the scenarios with
only one or two tipping points.
tipping points. We calibrate identical, uniform Bayesian priors for each tipping possibility so that
with year 2005 information the expected warming at which the first tipping point occurs is 2.5◦ C
relative to 1900.
3
Optimal Policy
Figure 2 presents the optimal tax on a ton of CO2 in 2015 (left) and 2050 (right) in settings
without any potential tipping points, with only a single potential tipping point, with two potential
tipping points, and with all three potential tipping points. The optimal tax in 2015 nearly doubles
from $6.2 per ton of CO2 in the absence of tipping concerns to $10.8 when taking the full range of
tipping possibilities and their interactions into account. The damage tipping point has the strongest
individual effect, increasing the optimal emission tax by 30% ($1.8). The feedback tipping point
increases the optimal emission tax by 14% ($0.8), and the carbon sink tipping point increases it
by 8% ($0.5). Similar findings hold for 2050: the possibility of three interacting tipping points
approximately doubles the optimal carbon tax from $15 to $30 per ton of CO2 , and the damage
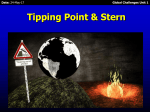
tipping point remains the single most important. Figure 3 presents the optimal emission and
temperature trajectories, conditional on not having crossed a threshold by the corresponding date.
Again, recognizing the potential for a carbon sink tipping point only slightly reduces optimal
4 TIPPING POINT INTERACTIONS
5
emissions and temperature. Recognizing the potential for a feedback tipping point reduces optimal
peak annual emissions by 1 Gt C and peak temperature by 0.3◦ C, and recognizing the potential
for a damage tipping point reduces optimal peak annual emissions by more than 2 Gt C and peak
temperature by over 0.6◦ C. Anticipating all three potential tipping points reduces optimal peak
annual emissions by almost 3 Gt C and reduces the optimal peak temperature from close to 4◦ C
to just below 3◦ C. Anticipating these tipping points makes optimal emissions and temperatures
decline more than half a century earlier.
4
Tipping Point Interactions
Our results indicate strong interactions between the different tipping points.1 Both the optimal
temperature reduction and the optimal carbon tax at a given time are larger than the sum of the
adjustments obtained from the individual tipping point models. The optimal carbon tax adjustment
in the joint model is 50% higher in 2015 (and almost 27% higher in 2050) than suggested by simply
adding the tax adjustments of the three individual tipping point models. The primary interaction
is between the temperature feedback and the damage tipping points: combining these two tipping
points into a single model raises the optimal 2015 tax adjustment by 35% above the sum of the
individual tax adjustments. The interaction between the temperature feedback and carbon sink
tipping points has the smallest effect, raising the carbon tax by 6% in 2015 above the individual
sums, and the interaction between the carbon sink and the damage tipping points implies a 22%
increase of the optimal tax adjustment over the sum of the adjustments deriving from the individual
tipping point models. The ranking of the relative importance of the tipping point interactions
persists throughout the century, with absolute adjustments increasing and relative adjustments
slightly decreasing.
5
Policy Delay
Our results so far demonstrate the implications of potential tipping points for optimal mitigation
policy. But actual emission policy has deviated substantially from model recommendations. Figure 4 analyzes the cost of postponing optimal policy in the presence of tipping points. It shows
1
A simple analytic theory model cannot determine whether the joint policy effect of multiple tipping points is
larger or smaller than the sum of the adjustments derived from individual tipping point models. On the one hand, a
given policy intervention simultaneously reduces the probability of several tipping points in the joint model. On the
other hand, each additional unit of emission reductions is more costly and less beneficial than the previous one. In
addition, an overall larger tipping probability makes the decision maker less willing to spend more on a risk reduction
because the expected benefit from saving increases: the probability of experiencing a tipped future is higher and in
a tipped world additional resources are more valuable.
5 POLICY DELAY
6
Figure 3: Optimal emissions (left) and temperature (right) in settings with a single potential tipping point
(blue lines) and with all three potential tipping points (red lines).
the expected welfare loss from delaying policy (left), as well as the optimal carbon tax that the
policymaker would have to set in year t if beginning to optimize only at that point (right). Prior to
year t, the emission pathway is defined by the Representative Concentration Pathway scenario that
stabilizes total radiative forcing at 6 W m−2 by 2100 (RCP6) [32, 33] and by a 22% investment rate.
RCP6 exhibits initially only moderate mitigation and then more significant stabilization efforts towards the end of the century (Figure 5 in the Supplementary Material). The initial carbon tax is
not affected much by a delay of less than 50 years. However, delay is expensive. Suppose policy
follows a “delay with optimal tipping response” scenario: the policymaker follows the exogenous
RCP6 emission pathway until 2050 if no tipping occurs, but switches to the optimal policy immediately in case of tipping before. Such a delay costs $1.5 trillion in current dollars, approximately the
GDP of Australia. If the policymaker follows this “delay with optimal tipping response” scenario
not just until mid-century but until the first (potential) occurrence of a tipping point, this cost
increases to $3.3 trillion, almost the GDP of Germany, even though the RCP6 emission pathway
implies substantial mitigation efforts by the end of the century.2
Now suppose that the policymaker follows a “delay without optimal tipping response” scenario.
First, assume that the policymaker fails to react to the first tipping point that occurs but does
switch to the optimal policy in case of triggering a second tipping point. Then the welfare loss
increases to $7.3 trillion, about twice of Germany’s GDP. We can also view this scenario as a proxy
for observing a threshold crossing only with major delay. Second, let us assume that policymakers
2
Figure 5 in the supplementary material shows that approximately a century from today the RCP6’s emission
trajectory catches up with the optimal emission trajectory (conditional on no tipping point having occurred, yet).
Thus, our numbers reflect the cost of delaying (not abandoning) policy even when the decision maker never switches
from RCP6 to the optimal policy.
6 CONCLUSIONS
7
Figure 4: The graph presents the welfare (left) and policy (right) consequences of delaying optimal climate
policy. On the left, “Delay with optimal tipping response” depicts the welfare cost from switching to optimal
policy only after period t or after a first tipping point occurs (if that happens before period t). “Delay
without optimal tipping response” depicts the welfare cost from switching to optimal policy only in period
t, regardless of whether tipping points occur before then. The right graph presents the optimal carbon tax
upon beginning to optimize policy in year t, assuming that year t has been reached without triggering a
tipping point.
never switch to the optimal policy, even if all three tipping points occur. Then, the welfare loss
from following the suboptimal RCP6 emission pathway increases to $13.5 trillion, almost four times
the GDP of Germany. The social social cost of emitting a ton of carbon today in this suboptimal
policy scenario increases by 50% to $15.3 per ton of CO2 compared to the case of optimal policy
(or even the case of optimal response to a first tipping point). These results demonstrate the value
of a reactive policy.3 They also emphasize the necessity of evaluating policy in a framework that
anticipates not only tipping possibilities but also how policy responds to future information.
6
Conclusions
Our findings show that tipping points are of major quantitative importance for climate change
policy. The presence of the three potential tipping points in our Bayesian learning model nearly
doubles the optimal carbon tax and reduces optimal peak warming by approximately 1◦ C. Moreover,
delaying optimal policy in the face of irreversible tipping points is very costly, even in a standard
economic model that exhibits a conservative damage function and discounts the future costs from
climate change in the usual way.
3
The supplementary material demonstrates how optimal policy responds to tipping points that happen to occur
in 2075.
6 CONCLUSIONS
8
Future studies should undertake more detailed scientific and economic analysis of individual tipping points. Our results suggest that adding the optimal tax (and temperature) adjustments across
separate studies provides a reasonable first-order approximation to the effect of jointly interacting
tipping points, with the sum still underestimating the effect on optimal policy.
Complementing the literature on early warning signals for tipping points [34, 35], we demonstrate the value of the ability to detect tipping points even after they have been irreversibly triggered. Delaying policy is expensive, but if detecting a triggered tipping point would spur nations
to collectively respond so as to reduce the chance of triggering further tipping points, then the
detection capability cuts the cost of policy delay by 75%.
The precise quantitative results from any integrated assessment model are sensitive to a number
of assumptions such as the discount rate and the damage parameterization. However, the model
allows us to gain a general understanding of how tipping point interactions amplify the cost of
following suboptimal policy paths and of how they affect optimal policy and the cost of delaying
policy. The underlying DICE model was employed by the U.S. government in determining the
social cost of carbon for use in cost-benefit assessments of proposed regulations [16, 17].
REFERENCES
9
References
[1] J. Hansen, et al., The Open Atmospheric Science Journal 2, 217 (2008).
[2] V. Ramanathan, Y. Feng, Proceedings of the National Academy of Sciences 105, 14245 (2008).
[3] J. Rockström, et al., Nature 461, 472 (2009).
[4] National Research Council, Abrupt Impacts of Climate Change: Anticipating Surprises (National Academies Press, Washington, D.C., 2013).
[5] K. Keller, B. M. Bolker, D. F. Bradford, Journal of Environmental Economics and Management 48, 723 (2004).
[6] T. S. Lontzek, Y. Cai, K. L. Judd, Tipping points in a dynamic stochastic IAM, RDCEP
Working Paper 12-03 , The Center for Robust Decision Making on Climate and Energy Policy
(2012).
[7] F. van der Ploeg, A. de Zeeuw, Climate policy and catastrophic change: Be prepared and
avert risk, OxCarre Working Paper 118 , Oxford Centre for the Analysis of Resource Rich
Economies, University of Oxford (2013).
[8] D. Lemoine, C. Traeger, American Economic Journal: Economic Policy 6, 137 (2014).
[9] T. M. Lenton, et al., Proceedings of the National Academy of Sciences 105, 1786 (2008).
[10] E. Kriegler, J. W. Hall, H. Held, R. Dawson, H. J. Schellnhuber, Proceedings of the National
Academy of Sciences 106, 5041 (2009).
[11] A. Levermann, et al., Climatic Change 110, 845 (2012).
[12] E. Kopits, A. L. Marten, A. Wolverton, Moving forward with incorporating “catastrophic”
climate change into policy analysis, Working Paper 13-01 , National Center for Environmental
Economics, U.S. Environmental Protection Agency (2013).
[13] T. M. Lenton, J.-C. Ciscar, Climatic Change 117, 585 (2013).
[14] W. D. Nordhaus, Science 258, 1315 (1992).
[15] W. D. Nordhaus, A Question of Balance: Weighing the Options on Global Warming Policies
(Yale University Press, New Haven, 2008).
REFERENCES
10
[16] Interagency Working Group on Social Cost of Carbon, Appendix 15a. social cost of carbon for
regulatory impact analysis under executive order 12866, Tech. rep., United States Government
(2010).
[17] M. Greenstone, E. Kopits, A. Wolverton, Review of Environmental Economics and Policy 7,
23 (2013).
[18] S. A. Zimov, E. A. G. Schuur, F. S. Chapin, Science 312, 1612 (2006).
[19] D. C. Hall, R. J. Behl, Ecological Economics 57, 442 (2006).
[20] D. Archer, Biogeosciences 4, 521 (2007).
[21] K. Schaefer, T. Zhang, L. Bruhwiler, A. P. Barrett, Tellus B 63, 165 (2011).
[22] C. Le Qur, et al., Science 316, 1735 (2007).
[23] T. Eglin, et al., Tellus B 62, 700 (2010).
[24] C. Huntingford, et al., Philosophical Transactions of the Royal Society B: Biological Sciences
363, 1857 (2008).
[25] M. Oppenheimer, Nature 393, 325 (1998).
[26] M. Oppenheimer, R. B. Alley, Climatic Change 64, 1 (2004).
[27] D. G. Vaughan, Climatic Change 91, 65 (2008).
[28] D. Notz, Proceedings of the National Academy of Sciences 106, 20590 (2009).
[29] D. L. Kelly, C. D. Kolstad, Journal of Economic Dynamics and Control 23, 491 (1999).
[30] A. J. Leach, Journal of Economic Dynamics and Control 31, 1728 (2007).
[31] C. Traeger, Environmental and Resource Economics Forthcoming (2014).
[32] R. H. Moss, et al., Nature 463, 747 (2010).
[33] T. Masui, et al., Climatic Change 109, 59 (2011).
[34] M. Scheffer, et al., Nature 461, 53 (2009).
[35] M. Scheffer, et al., Science 338, 344 (2012).
[36] J. B. Smith, et al., Proceedings of the National Academy of Sciences 106, 4133 (2009).
[37] P. Valdes, Nature Geoscience 4, 414 (2011).
Supplementary Information
A
The RCP 6 Scenario, Optimal Policy, and Post-Threshold Policy Reaction
Figure 5 compares emissions along the IPCC’s RCP6 scenario and our optimal emission trajectory
(on the left). The RCP6 scenario initially delays policy, but incurs major reduction measures
Figure 5: Emissions and temperature under the exogenous RCP6 scenario (dashed) and under the optimal
policy (solid) when there are three potential tipping points.
toward the end of the century to stabilize radiative forcing (and, thus, temperature; on the right).
The optimal policy shown in Figure 5 is conditional on not having crossed a tipping point. Figure 6
depicts how policy and the climate system respond if a tipping point occurs in 2075. The decision
maker’s stochastic knowledge did not allow him to anticipate the precise crossing, but he recognizes
the start of the regime shift and the optimal policy responds immediately as shown in the figure.
After 2075, the other two tipping points may still occur and the depicted policy anticipates this
possibility. Our depicted policy representation assumes that no further tipping point occurs by
2150: the decision maker is “lucky”, but cannot count on his luck while setting policy.
The top left panel of Figure 6 show that the optimal carbon tax increases once any of the three
tipping points has occurred. The optimal tax increases most strongly after the damage tipping
point occurs. The greater abatement effort translates into greater emission reductions than in the
case where no tipping point happens to occur (top right panel). These reduced emissions in turn
lead to sharply lower CO2 concentrations under the feedback and damage tipping points (bottom
left panel); however, the greater persistence of CO2 in the wake of the carbon sink tipping point
11
A THE RCP 6 SCENARIO, OPTIMAL POLICY, AND POST-THRESHOLD POLICY REACTION12
Figure 6: The effect of a tipping point on post-threshold policy and on the climate system. Plotted
simulations assume that all three tipping points are possible and that a particular one happens to occur in
2075 as the first tipping point.
means that the post-tipping CO2 trajectory is very similar to the no-tipping CO2 trajectory, despite
the reduction in emissions. The temperature trajectory is therefore also similar whether or not a
carbon sink tipping point happens to occur (bottom right panel). It is sharply lower in the wake of a
damage tipping point; however, the feedback tipping point’s effect on climate sensitivity outweighs
the emission reductions undertaken after it occurs, so that optimal warming is greatest in the wake
of a feedback tipping point.
B
B
13
METHODS
Methods
Model Summary
We reformulate the DICE-2007 model of [15] into a recursive dynamic programming problem following [29] and [31]. In response to the curse of dimensionality in dynamic programming, we reduce
the state space of the climate system’s representation. [31] shows that this simplification does not
impair the model’s ability to reproduce the DICE model’s climate response. We do make one substantive change to DICE, besides the introduction of tipping points. [15] adjusts a coefficient in
the damage function to compensate for not explicitly modeling climate catastrophes and tipping
points. This smooth and reversible damage adjustment contributes about half of DICE’s damages
at 1◦ C of warming. We eliminate this adjustment because we now explicitly model tipping points.
We introduce tipping points as regime shifts following [8]. That paper provides more details
about the modeling of the probability of tipping and of learning. In each period, the climate system
might irreversibly trigger any of the possible tipping regimes. The Bayesian policymaker assesses the
probability of tipping by updating its previous beliefs based on whether it has just observed a tipping
point or not. Each tipping point occurs with identical, independent probability in any given state
of the world, and the hazard of tipping is determined by the global average temperature increase.
These assumptions induce a binomial distribution over the number of tipping points triggered
between any two periods. When there are n potential tipping points, the probability of crossing k
of them between times t and t+1 is: Hkn (Tt , Tt+1 ) =
n!
k! (n−k)!
[h(Tt , Tt+1 )]k [1 − h(Tt , Tt+1 )]n−k . The
function h(Tt , Tt+1 ) is the time t hazard rate for a single tipping point as a function of temperature
at times t and t + 1. Currently, scientific modeling cannot suggest that some specific temperature
is a more likely threshold than another similar temperature [10, 36, 37]. Our policymaker therefore
believes that each tipping point’s temperature threshold is uniformly distributed
between oa fixed
n
min{Tt+1 ,T̄ }−Tt
. The
upper bound T̄ and a lower bound subject to learning: h(Tt , Tt+1 ) = max 0,
T̄ −T
t
hazard rate increases with Tt+1 because greater warming over the next interval carries a greater
risk of tipping over the next interval. The hazard rate’s dependence on Tt reflects that if a tipping
point is still possible, then its threshold has not been crossed yet and the policymaker has learned
that its threshold is either above the current temperature or does not exist at all.
We calibrate the threshold distributions so that in a model with three potential thresholds,
the policymaker with year 2005 information expects that 2.5◦ C of warming relative to 1900 would
trigger some tipping point. This requirement implies an upper bound T̄ of 7.8◦ C, which is among
the highest values explored in the sensitivity analysis for the single-tipping runs in [8]. An expected
trigger of 2.5◦ C is consistent with the political 2◦ C limits for avoiding dangerous anthropogenic
interference. Further, in the “burning embers” diagram [36], the yellow (medium-risk) shading for
B
14
METHODS
the “risk of large-scale discontinuities” begins around 1.6◦ C of warming relative to 1900, and the
red (high-risk) shading begins around 3.1◦ C of warming relative to 1900.
We solve the tipping scenarios recursively, starting with a world where all tipping thresholds
have been crossed. We solve the corresponding Bellman equation by value function iteration and
approximate the value function using a 104 -dimensional Chebychev-basis. Each iteration uses the
knitro solver to optimize abatement and consumption decisions at the Chebychev nodes. Once we
have successfully approximated that value function, we use it to define the post-tipping continuation
value in the scenarios where all but one tipping point has been crossed. We then approximate
the value functions for those scenarios following the procedure described above. Once we have
successfully approximated these value functions, they provide additional continuation values in
scenarios where all but two tipping points have been crossed. We then approximate these scenarios’
value functions, proceeding in this fashion until we approximate the value function for a scenario
in which no tipping point has yet occurred.
Model Equations
The state variables are effective capital kt , atmospheric CO2 Mt , cumulative temperature change
Tt , and time t. Throughout, bold parameters indicate parameters that are altered by tipping points.
Effective capital kt =
Kt
Lt A t
is capital Kt measured per amount of labor Lt and labor augmenting
technology At level. Labor and technology follow the exogenous equations
gA,0 −tδA
1−e
,
At =A0 exp
δA
gA,t =gA,0 e−tδA ,
(Production technology)
(Growth rate of production technology)
Lt =L0 + (L∞ − L0 ) 1 − e−tδL ,
−1
L∞
tδL
.
e −1
gL,t =δL
L∞ − L0
(Labor)
(Growth rate of labor)
Gross production in the economy is Ytgross = (At Lt )1−κ Ktκ , or in effective units
ytgross = ktκ .
Climate change damages reduce the effective gross output to the level
yt
1+Dt (TT ) ,
where the damage
function
Dt (Tt ) = d1 Ttd2
(Damages)
measures output loss as percentage of total production. The damage tipping point increases the
B
15
METHODS
coefficient d2 from 2 to 3. The remaining output is divided between effective consumption ct =
Ct
Lt A t ,
abatement expenditure, and capital investment. The equation of motion for capital is
kt+1 =e
−(gL,t +gA,t )
yt
− ct .
(1 − δk )kt + (1 − Λ(µt ))
1 + Dt
(Effective capital)
The function
Λ(µt ) =
Ψt µat 2
with
a0 σt
Ψt =
a2
1 − etgΨ
1−
a1
(Abatement cost)
measures the abatement cost as a function of the abatement rate µt . The abatement rate µt
measures the policy-induced emission reductions at time t as a fraction of the business-as-usual
emissions. The parameter
σt =σ0 exp
gσ,0 1 − e−tδσ
δσ
(Uncontrolled emissions per output)
measures the time t emission intensity of production.
The CO2 concentration follows the equation of motion
Mt+1 =Et + Mt b11 + b21 [b12 + (b22 + b32 b23 ) αB (Mt , t) + b32 b33 αO (Mt , t)] ,
(CO2 transition)
where the b parameters govern DICE’s carbon transition matrix. The function αB (M, t) represents
the combined biosphere and shallow ocean carbon stock as a fraction of the atmospheric stock,
and the function αO (M, t) represents the deep ocean carbon stock as a fraction of the atmospheric
stock. We estimate these functions using a set of emission scenarios simulated in the full version
of DICE [8]. This CO2 transition equation can be reduced to the following form:
Mt+1 = Et + [1 − δM (Mt , t)] Mt , ,
where δM (Mt , t) gives the carbon dioxide removal rate as a function of CO2 and time. Along the
first 100 years of the optimal pre-threshold policy path, it averages 0.0056. The carbon sink tipping
point reduces this removal rate by 50%. The emissions
Et = σt (1 − µt )Ytgross + Bt
(Emissions)
are unabated CO2 emissions from fossil fuel use and CO2 emissions from land use change and
B
16
METHODS
forestry. The latter evolve exogenously according to
Bt =B0 etgB .
(Non-industrial CO2 emissions)
A change in the atmospheric CO2 concentration causes a shift in the earth’s energy balance
expressed by the radiative forcing F (Mt , t) = f ln (Mt /Mpre ) + EFt , where f is the forcing from
doubled CO2 and Mpre is the preindustrial CO2 concentration. The exogenous forcing EFt includes
non-CO2 greenhouse gases and aerosols. It evolves according to
EFt =EF0 + 0.01(EF100 − EF0 ) min{t, 100}.
(Non-CO2 forcing)
Radiative forcing changes the temperature increase above 1900 levels as
Tt+1 =Tt + CT
f
F (Mt+1 , t + 1) − Tt − [1 − αT (Tt , t)] CO Tt ,
s
(Temperature transition)
a function of the lagged temperature, the carbon concentration, and the exogenous forcing from
other greenhouse gases. Ocean cooling enters through both the calibration of the heat capacity
parameters CT and CO as well as through the direct cooling function αT (Tt , t) that, following [8],
we interpolate from different scenarios that we simulated with the full DICE model, which explicitly
keeps track of the ocean temperature. The parameter s in the temperature transition equation is
climate sensitivity, or the equilibrium temperature change from doubling CO2 concentrations. The
climate feedback tipping point increases this parameter from 3 to 5.
The initial conditions correspond to 2015, even though DICE-2007 begins in the year 2005. We
obtain these initial conditions by simulating the model for 10 years with RCP6 emissions and a
22% investment rate, as described below. The resulting values for the climate variables are similar
to recent projections.
Value Functions and Solution Method
We solve the model using stochastic dynamic programming. The solution algorithm ensures that the
decision maker always has in mind the complete set of possible futures, including the optimal future
reactions to tipping points, when choosing her optimal policy in a given period. We recursively solve
for different sets of value functions, starting with the case where all tipping points have occurred
and working back to the present situation without any threshold yet being crossed. We will describe
the solution method for a case with three potential tipping points. The methods for settings with
fewer potential tipping points follow straightforwardly.
0 (k , M , T , t) the value function in the world where three tipping points (labeled
Denote by V1,2,3
t
t t
B
17
METHODS
Table 1: Parameterization of the numerical model following DICE-2007. Several values are rounded,
and CT and δκ vary slightly over time in order to reproduce the DICE results with an annual
timestep.
Parameter
Value
Description
A0
gA,0
δA
0.027
0.009
0.001
Production technology in 2005
Annual growth rate of production technology in 2005
Annual rate of decline in growth rate of production technology
L0
L∞
δL
6514
8600
0.035
Population in 2005 (millions)
Asymptotic population (millions)
Annual rate of convergence of population to asymptotic value
σ0
0.13
gσ,0
δσ
-0.0073
0.003
Emission intensity in 2005 before emission reductions (Gt C per unit
output)
Annual growth rate of emission intensity in 2005
Annual change in growth rate of emission intensity
a0
a1
a2
gΨ
1.17
2
2.8
-0.005
Cost of backstop technology in 2005 ($1000 per t C)
Ratio of initial backstop cost to final backstop cost
Abatement cost exponent
Annual growth rate of backstop cost
B0
gB
1.1
-0.01
Annual non-industrial CO2 emissions (Gt C) in 2005
Annual growth rate of non-industrial emissions
EF0
EF100
-0.06
0.30
Forcing in 2005 from non-CO2 agents (W m−2 )
Forcing in 2105 from non-CO2 agents (W m−2 )
κ
δκ
d1
d2
s
f
Mpre
CT
CO
0.3
0.06
0.0019
2
3
3.8
596.4
0.03
0.3
Capital elasticity in Cobb-Douglas production function
Annual depreciation rate of capital
Coefficient on temperature in the damage function
Exponent on temperature in the damage function
Climate sensitivity (◦ C)
Forcing from doubled CO2 (W m−2 )
Pre-industrial atmospheric CO2 (Gt C)
Translation of forcing into temperature change
Translation of surface-ocean temperature gradient into forcing
b11 ,b12 ,b13
b21 ,b22 , b23
0.978,0.023,0
0.011,0.983,0.005
b31 ,b32 ,b33
0,0.0003,0.9997
Transfer coefficients for carbon from the atmosphere
Transfer coefficients for carbon from the combined biosphere and
shallow ocean stock
Transfer coefficients for carbon from the deep ocean
ρ
η
0.015
2
Annual pure rate of time preference
Relative risk aversion (also aversion to intertemporal substitution)
k0
M0
T0
187/(A10 L10 )
865.98
0.915
Effective capital in 2015, with 187 US$trillion of capital
Atmospheric carbon dioxide (Gt C) in 2015
Surface temperature (◦ C) in 2015, relative to 1900
B
18
METHODS
1, 2, and 3) have already occurred and no further ones may occur. We obtain this value function
by solving the Bellman equation
0
V1,2,3
(kt ,Mt , Tt , t) = max
ct ,µt
ct1−η
0
+ βt V1,2,3
(kt+1 , Mt+1 , Tt+1 , t + 1)
1−η
(1)
subject to the equations summarized in section B. We solve the Bellman equation by function
iteration using a four dimensional tensor basis of Chebychev polynomials to approximate the value
function. The effective discount factor
βt = exp (−ρ + (1 − η)gA,t + gL,t )
(Effective discount factor)
accounts for the per effective unit of labor transformations of the Bellman equation [31]. The
optimization over consumption and abatement has to satisfy the constraints
ct +Ψt µat 2
Yt
Yt
≤
,
1 + Dt
1 + Dt
µt ≤ 1 .
(Output constraint)
(Non-negativity constraint for emissions)
The solution of equation 1 gives us the optimal policies in a world where all tipping points have
occurred, as well as the maximal welfare that can be achieved over the infinite time horizon in such
a world starting from any given state.
In the second step, we derive the value functions for the three worlds where two tipping points
have already occurred and one is still possible. We denote these value functions by V i (kt , Mt , Tt , t),
i , i, j, k ∈ {1, 2, 3}
where i ∈ {1, 2, 3} labels the tipping point that is still possible. V i is short for Vj,k
0
with i 6= j < k 6= i. Given V1,2,3
derived in the first step, we solve the three Bellman equations
V i (kt , Mt , Tt , t) = max
ct ,µt
ct1−η
+ βt [1 − H11 (Tt , Tt+1 )] V i (kt+1 , Mt+1 , Tt+1 , t + 1)
1−η
+
0
H11 (Tt , Tt+1 ) V1,2,3
(kt+1 , Mt+1 , Tt+1 , t
+ 1)
for V i , i ∈ {1, 2, 3}.
In the third step, we let Vi (kt , Mt , Tt , t) denote the value functions in the world where tipping point i ∈ {1, 2, 3} has already occurred and the other two are still possible. Vi is short for
0
Vij,k (kt , Mt , Tt , t) with i 6= j < k 6= i. Given the value functions V i and V1,2,3
obtained in the earlier
B
19
METHODS
steps, we derive the value functions Vi , i ∈ {1, 2, 3} by solving the three Bellman equations
ct1−η
+ βt 1 − 2H12 (Tt , Tt+1 ) − H22 (Tt , Tt+1 ) Vi (kt+1 , Mt+1 , Tt+1 , t + 1)
Vi (kt , Mt , Tt , t) = max
ct ,µt 1 − η
h
i
+ H12 (Tt , Tt+1 ) V k (kt+1 , Mt+1 , Tt+1 , t + 1) + V j (kt+1 , Mt+1 , Tt+1 , t + 1)
2
0
+ H2 (Tt , Tt+1 ) V1,2,3 (kt+1 , Mt+1 , Tt+1 , t + 1)
where k 6= i 6= j 6= k.
Finally, we obtain the value function V01,2,3 and optimal policies in the pre-threshold regime,
where no tipping point has yet occurred. This value function solves the Bellman equation
V01,2,3 (kt , Mt , Tt , t) = max
ct ,µt
ct1−η
+ βt 1 − 3H13 (Tt , Tt+1 ) − 3H23 (Tt , Tt+1 ) − H33 (Tt , Tt+1 )
1−η
× V01,2,3 (kt+1 , Mt+1 , Tt+1 , t + 1)
+
+
3
X
i=1
3
X
H13 (Tt , Tt+1 )Vi (kt+1 , Mt+1 , Tt+1 , t + 1)
H23 (Tt , Tt+1 )V i (kt+1 , Mt+1 , Tt+1 , t + 1)
i=1
+
0
H33 (Tt , Tt+1 ) V1,2,3
(kt+1 , Mt+1 , Tt+1 , t
+ 1)
.
The approximation intervals in the no-tipping runs cover effective capital values from 3 to 6,
atmospheric carbon stocks from 700 to 1800 Gt C, and temperature levels from 0.5 to 4◦ C above
1900 (plus the infinite time horizon mapped to the unit interval). We must vary the approximation
intervals for the pre- and post-threshold value functions in order to accommodate changes in dynamics and curvature due to tipping points. So that the continuation values are contained within
valid approximation regions, it is crucial that any value function with some number (potentially
zero) of tipping points already crossed and tipping point j remaining possible is approximated over
a weakly smaller interval than any value function with those same tipping points already crossed
and also having tipping point j already crossed. Much of the numerical burden lies in finding combinations of approximation intervals that allow each of the required value function iteration steps
to converge, where convergence is as described in [8]. Cases in which feedback and carbon sink
tipping points have already been crossed typically require larger approximation intervals because
the new dynamics tend to drive the carbon and temperature processes through wider regions of the
state space. On the other hand, cases in which the damage tipping point has already been crossed
B
METHODS
20
typically require narrower approximation intervals due to the tendency of the value function to
become strongly curved at high temperatures.
In the setting with only a single possible tipping point, all post-threshold value functions extend
the effective capital interval upwards to 7, extend the carbon interval upwards to 3000 Gt C, and
extend the temperature interval upwards to 6◦ C. The pre-threshold intervals are the same as in
the no-policy case when the single tipping point is a feedback or carbon sink tipping point, but the
case with a damage tipping point uses an interval with an upper bound of 7 for effective capital
and of 2000 Gt C for atmospheric carbon.
Now consider a setting with two potential tipping points. When both have been crossed, the
approximation interval extends up to 7 in the effective capital domain, extends up to 3000 Gt C
in the carbon domain, and extends up to 6◦ C in the temperature domain (8◦ C if the two tipping
points are the feedback and carbon sink tipping points). When only one has been crossed and the
damage tipping point is not the remaining one, the approximation interval extends up to 7 in the
effective capital domain, up to 2500 Gt C in the carbon domain, and up to 5◦ C in the temperature
domain. The interval is the same when none have been crossed and the damage tipping point is
not possible, except the temperature interval does not extend past 4◦ C. When only one tipping
point has been crossed and the damage tipping point remains possible, the approximation interval
extends up to 7 in the effective capital domain, up to 2000 Gt C in the carbon domain, and up to
4◦ C in the temperature domain. The interval is the same when no tipping points have been crossed
and the damage tipping point is one of the two that is possible.
Finally, consider the full setting with three potential tipping points. When all three have already
been crossed, the approximation interval extends up to 7 in the effective capital domain, up to 3000
Gt C in the carbon domain, and up to 6◦ C in the temperature domain. When only two tipping
points have been crossed, the approximation interval extends up to 7 in the effective capital domain,
up to 2500 Gt C in the carbon domain, and up to 5◦ C in the temperature domain (or 2000 Gt C
and 4◦ C if the damage tipping point is the one that has not been crossed). When only a single
tipping point has been crossed, the approximation interval extends up to 7 in the effective capital
domain, up to 2000 Gt C in the carbon domain, and up to 4◦ C in the temperature domain. This
same interval applies to the case in which no tipping points have been crossed.
Our results for present-day policy directly use the optimal value function and policy choices in
the year 2015. The optimal policies incorporate the possibility that any of the tipping points might
occur in any given year in the future, with the tipping probabilities depending on the evolution
of the climate states. The plotted paths simulating policy and climate characteristics into the
future, and also the plotted optimal policy values for 2050, rely on the additional assumption that
no tipping point has occurred by the given time. We use the equations of motion summarized in
B
METHODS
21
section B and the optimal policies derived above to simulate the paths.
We calculate the welfare loss from following RCP6 instead of the optimal scenario by replacing
the optimal policy in a given stage with a fixed 22% investment rate and RCP6’s fixed emission
trajectory, whose annual values we obtain from MAGICC 6.0 (see Figure 5in the Supplementary
Material). For these exogenous policy trajectories, we sum welfare over each year up to the time
when optimal policy begins, with the approximated value functions determining welfare from that
time forward. In cases where the policymaker reacts to some threshold crossing, we obtain the
summation for the period with RCP6 emissions by starting at the initial year and calculating perperiod utility along every possible path. In cases where the policymaker never reacts to a threshold
crossing, the large number of possible tipping paths makes this approach computationally impractical if policy is delayed by more than 40 years and nearly interminable if policy is delayed by
more than 70 years. In those cases with a nonresponsive policymaker, we reduce the number of
necessary calculations by using value function approximations to determine welfare along those
potential paths for which at least one tipping point has occurred. More specifically, we use Chebychev polynomials (as described above) to approximate welfare after having crossed each possible
combination of tipping points at any potential combination of state variables, assuming optimal
policy begins at a particular year of interest. This approach yields nearly identical results to the
explicit calculation approach for all simulations (i.e., periods of delay up to and including 70 years)
for which we were able to obtain results under both approaches. Reported results for which optimal
policy never begins in the absence of triggered tipping points are implemented by delaying policy
for 400 years.