Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Central pattern generator wikipedia , lookup
Neural coding wikipedia , lookup
Neuropsychopharmacology wikipedia , lookup
Cognitive neuroscience of music wikipedia , lookup
Cognitive flexibility wikipedia , lookup
Binding problem wikipedia , lookup
Nervous system network models wikipedia , lookup
Neuroesthetics wikipedia , lookup
Synaptic gating wikipedia , lookup
Feature detection (nervous system) wikipedia , lookup
Premovement neuronal activity wikipedia , lookup
Time perception wikipedia , lookup
Embodied cognitive science wikipedia , lookup
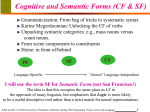
New MNS New Grasp New Concept New Anatomy Fig 1 Fig 2 Fig 3 Fig 3 Task Constraints (F6) Working Memory (46) Instruction Stimuli (F2) AIP Ways to grab PFC “It’s a mug” F5 F1 canonical IT cIPS Ventral Stream: Recognition Hand Control Task Constraints (F6) Working Memory (46) Instruction Stimuli (F2) PF Handobject trajectories PFC “It’s a mug” F5 mirror IT Dorsal Stream: Affordances F1 Hand Shape & Motion STS Hand Control Feedback Correction Observe Execute F5 mirror F5 canonical Recognize Actions Command Actions Interpretation Planning Working Memory for Perception and Production of Utterances Working Memory for Actions, Objects, and Relationships Auditory Input Tpt Wernicke’s PF extended DPLF IT STSa Visual Input Recognizing Actions, Objects, and Relationships PF AIP Multimodal Broca’s area (vocal, manual, orofacial) Protospeech (basis for speech) From Imitation to Describing Actions, Objects, Relationships Protosign (basis for sign language) F5 mirror Recognizing an Action F5 canonical Choosing an Action Arbib, 2001 updated by FARS modificato Object features Object affordance extraction AIP Object affordance 7b: PF/PG -hand state Integrate association temporal cIPS association F5canonical Motor program (Grasp) Hand shape recognition Mirror Action recognition Motor Feedback Hand (Mirror program motion Neurons) Hand-Object (Reach) detection spatial relation F5mirror F4 analysis STS 7a Object location The Mirror Neuron System (MNS) Model (Oztop & Arbib) Motor execution M1 • Activity of F5 canonical neurons is part of the code for Command: Grasp-A(Object) The full neural representation of the “Cognitive Form” (CF): Grasp-A(Object) requires not only the regions AIP and F5canonical shown in the MNS diagram, but also inferotemporal cortex (IT) which holds the identity of the object. How are these representations bound together? • NOTE: This is only the “Cognitive Form”. There are no “Linguistic Forms” in the monkey. Object features Object affordance extraction cIPS 7b: PF/PGObject affordance -hand state association Hand shape recognition Hand motion detection STS F5canonical Motor program (Grasp) AIP Integrate temporal association Action Mirror Feedback recognition Hand-Object spatial relation analysis 7a F5mirror Motor program (Reach) F4 The Mirror Neuron System (MNS) Model (Oztop & Arbib) Motor execution M1 Object location • Activity of F5 mirror neurons is part of the code for Declarative: Grasp-A(Agent, Object) The full neural representation of the “Cognitive Form” (CF): Grasp-A(Agent, Object) requires not only the regions AIP, STS, 7a, 7b and F5miirror shown in the MNS diagram, but also inferotemporal cortex (IT) which holds the identity of the object and regions of STS (?) not included in MNS which hold the identity of the agent. • How are these representations bound together? • Agent Action Object Analysis of the Mirror System makes • Grasp (Raisin) primary, where the Agent is the self and thus unspecified, • and then makes • Grasp (Leo, Raisin) secondary • The mirror system expands the representational capacity of the canonical system to allow the Agent role to be played by others as well. • But note that the full power of the system is “Beyond the Mirror” embedding MNS in a larger system: F5 canonical F5 mirror STS Agent IT Observed Action Executed Action Object view of object Learn by Imitation "Social Learning" view of gesture AIP gesture description STS (and 7b?) Learn by Doing Try to Grasp Object MP: Gesture Motor Program gesture recognition expectation F5 ENN 7b or F5? command corollary discharge MPG Mirror neurons Non-Mirror Neurons grasp of object