Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Mirror symmetry (string theory) wikipedia , lookup
Anti-de Sitter space wikipedia , lookup
Surface (topology) wikipedia , lookup
Tessellation wikipedia , lookup
List of regular polytopes and compounds wikipedia , lookup
Cartesian coordinate system wikipedia , lookup
Four-dimensional space wikipedia , lookup
Pythagorean theorem wikipedia , lookup
Perspective (graphical) wikipedia , lookup
Duality (projective geometry) wikipedia , lookup
Riemannian connection on a surface wikipedia , lookup
Multilateration wikipedia , lookup
Systolic geometry wikipedia , lookup
Differential geometry of surfaces wikipedia , lookup
Rational trigonometry wikipedia , lookup
Analytic geometry wikipedia , lookup
Shape of the universe wikipedia , lookup
Algebraic geometry wikipedia , lookup
Cartan connection wikipedia , lookup
Lie sphere geometry wikipedia , lookup
Geometrization conjecture wikipedia , lookup
Hyperbolic geometry wikipedia , lookup
History of geometry wikipedia , lookup
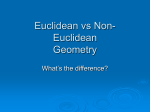
Euclidean Geometry and History of Non-Euclidean Geometry The term non-Euclidean geometry (also spelled: non-Euclidian geometry) describes both hyperbolic and elliptic geometry, which are contrasted with Euclidean geometry. The essential difference between Euclidean and nonEuclidean geometry is the nature of parallel lines. In Euclidean geometry, if we start with a point A and a line l, then we can only draw one line through A that is parallel to l. In hyperbolic geometry, by contrast, there are infinitely many lines through A parallel to l, and in elliptic geometry, parallel lines do not exist. (See the entries on hyperbolic geometry and elliptic geometry for more information.) Another way to describe the differences between these geometries is as follows: consider two lines in a plane that are both perpendicular to a third line. In Euclidean and hyperbolic geometry, the two lines are then parallel. In Euclidean geometry, however, the lines remain at a constant distance, while in hyperbolic geometry they "curve away" from each other, increasing their distance as one moves farther from the point of intersection with the common perpendicular. In elliptic geometry, the lines "curve toward" each other, and eventually intersect; therefore no parallel lines exist in elliptic geometry. Behavior of lines with a common perpendicular in each of the three types of geometry The five axioms for Euclidean geometry are: 1. Any two points can be joined by a straight line. (This line is unique given that the points are distinct) 2. Any straight line segment can be extended indefinitely in a straight line. 3. Given any straight line segment, a circle can be drawn having the segment as radius and one endpoint as center. 4. All right angles are congruent. 5. Through a point not on a given straight line, one and only one line can be drawn that never meets the given line. The fifth postulate is called the parallel postulate. Euclid used a different version of the parallel postulate, and there are several ways one can write the 5th postulate. They are all equivalent and lead to the same geometry. "If two lines are drawn which intersect a third in such a way that the sum of the inner angles on one side is less than two right angles, then the two lines inevitably must intersect each other on that side if extended far enough." (Euclid's version) "The sum of the angles in a triangle is exactly 180 degrees." “given a line L, and a point P not on that line, there is exactly one line through P which is parallel to L”. The axioms are basic statements about lines, line segments, circles, angles and parallel lines. We need these statements to determine the nature of our geometry. (http://euler.slu.edu/escher/index.php/The_Three_Geometries ) Euclidean Geometry and History of Non-Euclidean Geometry Spherical geometry n. The geometry of circles, angles, and figures on the surface of a sphere. (Read more: http://www.answers.com/topic/spherical-geometry#ixzz1n8mVCNkx ) Spherical Geometry The five axioms for spherical geometry are: 1. Any two points can be joined by a straight line. 2. Any straight line segment can be extended indefinitely in a straight line. 3. Given any straight line segment, a circle can be drawn having the segment as radius and one endpoint as center. 4. All right angles are congruent. 5. There are NO parallel lines. A great circle divides the sphere into two equal hemispheres. Elliptic geometry (ə′lip·tik jē′äm·ə·trē) (mathematics) The geometry obtained from Euclidean geometry by replacing the parallel line postulate with the postulate that no line may be drawn through a given point, parallel to a given line. Also known as Riemannian geometry. Read more: http://www.answers.com/topic/elliptic-geometry-1#ixzz1n8msBzGE Elliptic geometry (sometimes known as Riemannian geometry) is a non-Euclidean geometry, in which, given a line L and a point p outside L, there exists no line parallel to L passing through p. Elliptic geometry, like hyperbolic geometry, violates Euclid's parallel postulate, which asserts that there is exactly one line parallel to L passing through p. In elliptic geometry, there are no parallel lines at all. Elliptic geometry has other unusual properties. For example, the sum of the angles of any triangle is always greater than 180°. The simplest model of elliptic geometry is that of spherical geometry, where points are points on the sphere, and lines are great circles through those points. On the sphere, such as the surface of the Earth, it is easy to give an example of a triangle that requires more than 180°: For two of the sides, take lines of longitude that differ by 90°. These form an angle of 90° at the North Pole. For the third side, take the equator. The angle of any longitude line makes with the equator is again 90°. This gives us a triangle with an angle sum of 270°, which would be impossible in Euclidean geometry. Euclidean Geometry and History of Non-Euclidean Geometry Elliptic geometry is sometimes called Riemannian geometry, in honor of Bernhard Riemann, but this term is usually used for a vast generalization of elliptic geometry. See Riemannian geometry. Hyperbolic Geometry The five axioms for hyperbolic geometry are: 1. Any two points can be joined by a straight line. 2. Any straight line segment can be extended indefinitely in a straight line. 3. Given any straight line segment, a circle can be drawn having the segment as radius and one endpoint as center. 4. All right angles are congruent. 5. Through a point not on a given straight line, infinitely many lines can be drawn that never meet the given line. Hyperbolic geometry, (think of a balloon with a stamp on it) also called saddle geometry or Lobachevskian geometry, is the non-Euclidean geometry obtained by replacing the parallel postulate with the hyperbolic postulate, which states: "Given a line L and any point A not on L, at least two distinct lines exist which pass through A and are parallel to L." In this case parallel means that the lines do not intersect L, even when extended, rather than that they are a constant distance from L. In hyperbolic geometry, the term parallel only applies to lines that don't intersect in the hyperbolic plane but intersect at the circle at infinity. Lines that neither intersect in the hyperbolic plane nor the circle at infinity are called ultraparallel. One remarkable property of the hyperbolic plane is that there is a unique common perpendicular for each pair of ultraparallel lines (see Ultraparallel theorem). Hyperbolic man takes a walk Hyperbolic Saddle Euclidean Geometry and History of Non-Euclidean Geometry Models of Hyperbolic Space - http://euler.slu.edu/escher/index.php/Hyperbolic_Geometry On a sphere, a small neighborhood of a point looks like a cap. In hyperbolic space, every point looks like a saddle: A piece of a sphere A piece of hyperbolic space Figure 1 Spherical Geometric Cap Figure 2 Hyperbolic Geometric Saddle Hyperbolic man takes a walk