
CHAPTER 1. LINES AND PLANES IN SPACE §1. Angles and
... two intersecting lines in this plane, then (by Problem 1.12) its projection to plane Π is parallel to the bisector of one of the two angles formed by these lines. We may assume that all the three lines meet at one point. If line l is the bisector of the angle between lines l1 and l2 , then l1 and l2 ...
... two intersecting lines in this plane, then (by Problem 1.12) its projection to plane Π is parallel to the bisector of one of the two angles formed by these lines. We may assume that all the three lines meet at one point. If line l is the bisector of the angle between lines l1 and l2 , then l1 and l2 ...

Hyperbolic plane geometry revisited
... 2. The distance of points and on the lengths of segments First we extract the concepts of the distance of real points following the method of the book of Cyrill Vörös ([16]). We extend the plane with two types of points, one of the type of the points at infinity and the other one the type of ideal ...
... 2. The distance of points and on the lengths of segments First we extract the concepts of the distance of real points following the method of the book of Cyrill Vörös ([16]). We extend the plane with two types of points, one of the type of the points at infinity and the other one the type of ideal ...

An Introduction to Combinatorics and Graph Theory
... This work is licensed under the Creative Commons Attribution-NonCommercial-ShareAlike License. To view a copy of this license, visit http://creativecommons.org/licenses/by-nc-sa/3.0/ or send a letter to Creative Commons, 543 Howard Street, 5th Floor, San Francisco, California, 94105, USA. If you di ...
... This work is licensed under the Creative Commons Attribution-NonCommercial-ShareAlike License. To view a copy of this license, visit http://creativecommons.org/licenses/by-nc-sa/3.0/ or send a letter to Creative Commons, 543 Howard Street, 5th Floor, San Francisco, California, 94105, USA. If you di ...

EUCLIDEAN, SPHERICAL AND HYPERBOLIC
... 1.1. Points at infinity. The sphere is bounded and compact, and the lines (geodesics) are closed circles. In the Euclidean and hyperbolic cases, it is often convenient to extend the planes by adding improper points at infinity. (From a topological point of view, we compactify the space.) The details ...
... 1.1. Points at infinity. The sphere is bounded and compact, and the lines (geodesics) are closed circles. In the Euclidean and hyperbolic cases, it is often convenient to extend the planes by adding improper points at infinity. (From a topological point of view, we compactify the space.) The details ...
isosceles trapezoid
... An isosceles trapezoid is a trapezoid whose legs are congruent and that has two congruent angles such that their common side is a base of the trapezoid. Thus, in an isosceles trapezoid, any two angles whose common side is a base of the trapezoid are congruent. In Euclidean geometry, the convention i ...
... An isosceles trapezoid is a trapezoid whose legs are congruent and that has two congruent angles such that their common side is a base of the trapezoid. Thus, in an isosceles trapezoid, any two angles whose common side is a base of the trapezoid are congruent. In Euclidean geometry, the convention i ...


calabi triangles for regular polygons
... by connecting the vertices of the polygon to the center. The angle in any of these smaller triangles at the center of the polygon is 2π/n and the two other angles are each π/2 − π/n. Let β = π/n so the three angles are 2β, π/2 − β and π/2 − β. Suppose that an inscribed regular polygon has two of its ...
... by connecting the vertices of the polygon to the center. The angle in any of these smaller triangles at the center of the polygon is 2π/n and the two other angles are each π/2 − π/n. Let β = π/n so the three angles are 2β, π/2 − β and π/2 − β. Suppose that an inscribed regular polygon has two of its ...

Atomic orbitals, symmetry, and coordination polyhedra
... wave function or atomic orbital, are contained in its angular component U(u)·F(f). Furthermore, each of the three factors of C (Eq. (3)) generates a quantum number. Thus the factors R(r), U(u), and F(f) generate the quantum numbers n, l, and ml (or simply m), respectively. The principal quantum numb ...
... wave function or atomic orbital, are contained in its angular component U(u)·F(f). Furthermore, each of the three factors of C (Eq. (3)) generates a quantum number. Thus the factors R(r), U(u), and F(f) generate the quantum numbers n, l, and ml (or simply m), respectively. The principal quantum numb ...


pg 397 - saddlespace.org
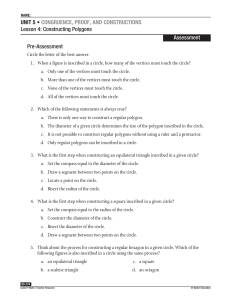
... A regular pentagon has 5 congruent sides and 5 congruent interior angles. The exterior angles are also congruent, since angles supplementary to congruent angles are congruent. Let n be the measure of each exterior angle. Use the Polygon Exterior Angles Sum Theorem to write an equation. 5n = 360 Solv ...
... A regular pentagon has 5 congruent sides and 5 congruent interior angles. The exterior angles are also congruent, since angles supplementary to congruent angles are congruent. Let n be the measure of each exterior angle. Use the Polygon Exterior Angles Sum Theorem to write an equation. 5n = 360 Solv ...


04 Measurement.qxd - Annenberg Learner
... An angle can be defined as the union of two rays with a common endpoint. (A ray begins at a point and extends infinitely in one direction.) The common endpoint is called the vertex (A in the figure below), and the rays are called the sides of the angle. It’s customary to name an angle using an angle ...
... An angle can be defined as the union of two rays with a common endpoint. (A ray begins at a point and extends infinitely in one direction.) The common endpoint is called the vertex (A in the figure below), and the rays are called the sides of the angle. It’s customary to name an angle using an angle ...
congruent polygons
... Two polygons are congruent if and only if there is a correspondence between their sides and angles such that: 1. Each pair of corresponding angles is congruent. 2. Each pair of corresponding sides is congruent. homework Holt Geometry ...
... Two polygons are congruent if and only if there is a correspondence between their sides and angles such that: 1. Each pair of corresponding angles is congruent. 2. Each pair of corresponding sides is congruent. homework Holt Geometry ...
List of regular polytopes and compounds

This page lists the regular polytopes and regular polytope compounds in Euclidean, spherical and hyperbolic spaces.The Schläfli symbol describes every regular tessellation of an n-sphere, Euclidean and hyperbolic spaces. A Schläfli symbol describing an n-polytope equivalently describes a tessellation of a (n-1)-sphere. In addition, the symmetry of a regular polytope or tessellation is expressed as a Coxeter group, which Coxeter expressed identically to the Schläfli symbol, except delimiting by square brackets, a notation that is called Coxeter notation. Another related symbol is the Coxeter-Dynkin diagram which represents a symmetry group with no rings, and the represents regular polytope or tessellation with a ring on the first node. For example the cube has Schläfli symbol {4,3}, and with its octahedral symmetry, [4,3] or File:CDel node.pngFile:CDel 4.pngFile:CDel node.pngFile:CDel 3.pngFile:CDel node.png, is represented by Coxeter diagram File:CDel node 1.pngFile:CDel 4.pngFile:CDel node.pngFile:CDel 3.pngFile:CDel node.png.The regular polytopes are grouped by dimension and subgrouped by convex, nonconvex and infinite forms. Nonconvex forms use the same vertices as the convex forms, but have intersecting facets. Infinite forms tessellate a one-lower-dimensional Euclidean space.Infinite forms can be extended to tessellate a hyperbolic space. Hyperbolic space is like normal space at a small scale, but parallel lines diverge at a distance. This allows vertex figures to have negative angle defects, like making a vertex with seven equilateral triangles and allowing it to lie flat. It cannot be done in a regular plane, but can be at the right scale of a hyperbolic plane.A more general definition of regular polytopes which do not have simple Schläfli symbols includes regular skew polytopes and regular skew apeirotopes with nonplanar facets or vertex figures.