Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Photon polarization wikipedia , lookup
Four-vector wikipedia , lookup
Newton's theorem of revolving orbits wikipedia , lookup
Angular momentum operator wikipedia , lookup
N-body problem wikipedia , lookup
Old quantum theory wikipedia , lookup
Monte Carlo methods for electron transport wikipedia , lookup
Hunting oscillation wikipedia , lookup
Laplace–Runge–Lenz vector wikipedia , lookup
Path integral formulation wikipedia , lookup
Renormalization group wikipedia , lookup
Classical mechanics wikipedia , lookup
Centripetal force wikipedia , lookup
Work (physics) wikipedia , lookup
Derivations of the Lorentz transformations wikipedia , lookup
Dirac bracket wikipedia , lookup
Center of mass wikipedia , lookup
Theoretical and experimental justification for the Schrödinger equation wikipedia , lookup
Relativistic angular momentum wikipedia , lookup
Newton's laws of motion wikipedia , lookup
Classical central-force problem wikipedia , lookup
Rigid body dynamics wikipedia , lookup
Hamiltonian mechanics wikipedia , lookup
Relativistic mechanics wikipedia , lookup
Relativistic quantum mechanics wikipedia , lookup
Noether's theorem wikipedia , lookup
Equations of motion wikipedia , lookup
Lagrangian mechanics wikipedia , lookup
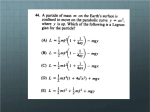
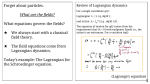
Lecture 19: Calculus of Variations II - Lagrangian 1. Key points Lagrangian Euler-Lagrange equation Canonical momentum Variable transformation Maple VariationalCalculus package EulerLagrange 2. Newton's method vs Lagrange's method In the Newton's theory of motion, the position of a particle is determined by an ODE, (2.1) In general we find the trajectory by solving this ODE with an initial conditions . and In the Lagrange's method, we try to find the trajectory by minimizing a functional. In this case, we use a boundary condition: the initial position and the final position . The functional is given in a form: (2.2) where is called Lagrangian. The trajectory that minimizes is determined by the Euler-Lagrange equation (2.3) The Newton's method and the Lagrange's method should give the same trajectory. Therefore, Eq. (2.3) should be equivalent to (2.1). If the force is given by a potential energy function , then satisfies the requirement, where is kinetic energy. Proof Consider a particle of mass in a one-dimensional potential field . The Newton equation is (2.1.1) Using the Lagrangian The Euler-Lagrange equation is given by (2.1.3) 3. Coordinate transformations Consider a coordinate transformation from to . where are in general a function of . So, we write it as What is the Newton equations in the new coordinates? The result is usually very complicated. (See the example below). However, Euler-Lagrange equation has exactly the same mathematical form. The new Lagrangian and old one are related by the coordinate transformation as (3.1) The Euler-Lagrange equation under the new coordinates is (3.2) This is because .The minimum of should not depend on the choice of the coordinates. Example: Cartesian vs Spherical Cartesian coordinates Spherical coordinates (3.1.1) (3.1.4) (3.1.1) (3.1.4) (3.1.2) (3.1.5) (3.1.3) (3.1.6) (3.1.7) (3.1.11) (3.1.8) (3.1.12) (3.1.9) (3.1.13) (3.1.14) (3.1.10) (3.1.14) (3.1.10) 4. Canonical momentum and its conservation We define a canonical momentum as (4.1) Then, the Euler-Lagrange equation is written as (4.2) For Cartesian coordinates, the canonical momentum corresponding to the coordinate is given by 0 which is linear momentum in the direction. For the spherical coordinates, the canonical momentum corresponding to the coordinate is given by 0 which is angular momentum If the Lagrangian does not depend on a coordinate , the right hand side of (4.2) vanishes. Therefore, . This indicates that the corresponding canonical momentum conserves in time. 5. Energy conservation When the Lagrangian does not depend on time explicitly, the following quantity conserves in time. (5.1) where is a canonical momentum corresponding to the coordinate . Proof where we used 5. Examples 5.1 A horizontal disk of radius is spinning about its center in the counterclockwise with a constant angular velocity . An end of a massless string of length is fixed to the edge of the disk. A mass is attached to the other end of the string. The mass horizontally oscillates with respect to the suspension point. The angle shown in the figure can be used as a generalized coordinate. Show that the equation of motion for is mathematically equivalent to that of a pendulum except for the gravity is replaced with something else. First, we express the position of the mass and in terms of the generalized coordinate (6.1.1) (6.1.2) and the corresponding velocity (6.1.3) (6.1.4) Since there is no potential energy, Lagrangian has only kinetic energy terms (6.1.5) simplify = 0 Taking into account simplified to , the Lagrangian is further (6.1.6) Now, we derive the equation of motion using Euler-Lagrange equation . (6.1.7) simplify = This equation is mathematically equivalent to the equation of motion for a usual pendulum with gravity Answer: . 5.2 Four massless rigid rods of length are connected by hinges so that they form a rhombus (see Figure.) The top corner A is fixed. Two objects of mass and another of mass are attached to the hinges as shown in Figure. The mass can move only vertically along the vertical axis. The whole system rotates around the vertical axis with angular velocity of . Then, the system has only one degree of freedom. For example, the angle shown in Figure 1. . and the corresponding velocity uniquely determine the state of the system. 1. Express the Lagrangian of the system using $\theta$ as a coordinate. 2. Find the equation of motion for $\theta$. 3. Find an equilibrium angle $\theta^*$ as a function of $\Omega$. Define positions 0 Define velocities 0 Construct kinetic energy for each mass Construct potential energy for each mass (1) Lagrangian (6.2.1) Simplifying the expression, (6.2.2) (2) Equation of motions (6.2.3) (3) Equilibrium position To find an equilibrium position, we set =0. (6.2.4) (6.2.5) Hence, there are three equilibrate (note that arccos has two values) if only one if and . Answer: (a) (b) (c) When equilibrium angles , is a stable equilibrium. If , becomes unstable. New are stable. 5.3 Two identical masses connected by a string hang over two massless pulleys as shown in Figure. While the left mass moves only in a vertical line, the right one is free to swing in the plane defined by the pulleys and the left mass. In order to describe the motion of masses, we introduce generalized coordinates constant, which is a constraint in this problem. 1. Find the Lagrangian for the system using the generalized coordinates. 2. Find the canonical momentum for each generalized coordinates. 3. Find the equations of motion. Let the position of the left mass be Since the length of string is fixed, and . Immediately, we know . (6.3.1) where is a constant. The position of the right mass is given by Their velocities are 0 The Lagrangian for the system is (6.3.2) simplify = (6.3.3) (2) Using the definition of canonical momentum, we obtain: (6.3.4) (6.3.5) (3) Using Euler-Lagrange equation, (6.3.6) simplify = (6.3.7) (6.3.8) simplify = (6.3.9) Therefore, the equations of motion are (6.3.10) and (6.3.11)