Instruction Manual/Experiments Guide
... PASCO scientific warrants this product to be free from defects in materials and workmanship for a period of one year from the date of shipment to the customer. PASCO will repair or replace, at its option, any part of the product which is deemed to be defective in material or workmanship. This warran ...
... PASCO scientific warrants this product to be free from defects in materials and workmanship for a period of one year from the date of shipment to the customer. PASCO will repair or replace, at its option, any part of the product which is deemed to be defective in material or workmanship. This warran ...


Patellar Tracking in Primary Total Knee
... perpendicular to this is the reference line for femoral component external rotation. This reference line prioritizes aligning the femoral component for optimal patellar tracking25. The posterior condylar axis uses a line between the posterior femoral condyles at 90º of flexion. External rotation of ...
... perpendicular to this is the reference line for femoral component external rotation. This reference line prioritizes aligning the femoral component for optimal patellar tracking25. The posterior condylar axis uses a line between the posterior femoral condyles at 90º of flexion. External rotation of ...



final exam - PHYSICS57
... 8. A plane takes off from a level runway with two gliders in tow, one behind the other. The first glider has a mass of 1600 kg and the second a mass of 800 kg. The frictional drag may be assumed as constant and equal to 2000 N on each glider. The towrope between the first glider and the plane can wi ...
... 8. A plane takes off from a level runway with two gliders in tow, one behind the other. The first glider has a mass of 1600 kg and the second a mass of 800 kg. The frictional drag may be assumed as constant and equal to 2000 N on each glider. The towrope between the first glider and the plane can wi ...

Martinec-ContinuumMechanics.pdf
... Conversely, considering vector ~v in κt that, in general, differs from V referred to XK and xk , respectively, are vK = ~v · I~K , ...
... Conversely, considering vector ~v in κt that, in general, differs from V referred to XK and xk , respectively, are vK = ~v · I~K , ...



Review Problems for Introductory Physics 1
... The problems in this review guide are provided as is without any guarantee of being correct! That’s not to suggest that they are all broken – on the contrary, most of them are well-tested and have been used as homework, quiz and exam problems for decades if not centuries. It is to suggest that they ...
... The problems in this review guide are provided as is without any guarantee of being correct! That’s not to suggest that they are all broken – on the contrary, most of them are well-tested and have been used as homework, quiz and exam problems for decades if not centuries. It is to suggest that they ...


FREE Sample Here
... Full file at http://TestbanksCafe.eu/Test-Bank-for-PHYSICS-1st-Edition-Ostdiek ...
... Full file at http://TestbanksCafe.eu/Test-Bank-for-PHYSICS-1st-Edition-Ostdiek ...
I. Course Title Advanced Placement Physics C: Mechanics and
... Given multi-dimensional, time dependent vector functions for one of the kinematics quantities students can determine all other kinematic quantities by the explicit use of calculus techniques including chain rule, product rule, or various forms of integration of polynomial and non-polynomial function ...
... Given multi-dimensional, time dependent vector functions for one of the kinematics quantities students can determine all other kinematic quantities by the explicit use of calculus techniques including chain rule, product rule, or various forms of integration of polynomial and non-polynomial function ...



Momentum
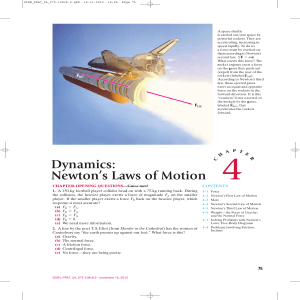
... Newton's second law as discussed in an earlier unit. Newton's second law (Fnet=m*a) stated that the acceleration of an object is directly proportional to the net force acting upon the object and inversely proportional to the mass of the object. When combined with the definition of acceleration (a=ch ...
... Newton's second law as discussed in an earlier unit. Newton's second law (Fnet=m*a) stated that the acceleration of an object is directly proportional to the net force acting upon the object and inversely proportional to the mass of the object. When combined with the definition of acceleration (a=ch ...