Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Prisoner's dilemma wikipedia , lookup
Nash equilibrium wikipedia , lookup
Game mechanics wikipedia , lookup
Evolutionary game theory wikipedia , lookup
Turns, rounds and time-keeping systems in games wikipedia , lookup
Replay value wikipedia , lookup
Stochastic Games
Krishnendu Chatterjee
CS 294
Game Theory
Games on Components.
Model interaction between components.
Games as models of interaction.
Repeated Games: Reactive Systems.
Games on Graphs.
Today’s Topic:
Games played on game graphs.
Possibly for infinite number of rounds.
Winning Objectives:
Reachability.
Safety ( the complement of Reachability).
Games.
1 Player Game : Graph G=(V,E) . R µ V which is the
target set.
2 Player Game: G=(V,E, (V,V})). Rµ V. (alternating
reachability).
Games.
1 Player Game : Graph G=(V,E) . R µ V which is the
target set.
1-1/2 Player Game (MDP’s) : G=(V,E,(V,V°)). Rµ V.
2 Player Game: G=(V,E, (V,V})). Rµ V. (alternating
reachability) .
2-1/2 Player Game: G=(V,E,(V,V},V°)). Rµ V.
1-1/2 player game
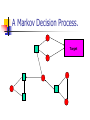
Markov Decision Processes.
•
A Markov Decision Process (MDP) is defined as follows:
•
G=(V,E, (V, V°) R)
•
(V,E) is a graph.
•
(V, V°) is a partition.
•
Rµ V – set of Target nodes.
•
V° are random nodes chooses between successors
uniformly at random.
•
For simplicity we assume our graphs are binary.
A Markov Decision Process.
Target
Strategy.
1: V* ¢ V ! D(V) such that for all
x 2 V* and v 2 V, if 1(x ¢ v) >0,
(v,1(x ¢ v) ) 2 E.
( D(V) is a probability distribution over
successor).
Subclass of Strategies.
Pure Strategy : Chooses one successor and not a
distribution.
Memoryless Strategy: Strategy independent of the
history. Hence can be represented as 1: V ! D(V)
Pure Memoryless Strategy is a strategy which is pure
and memoryless. Hence can be represented as
1: V ! V
Values.
Reach(R)={ s0 s1 … | 9 k. sk 2 R }
v1(s) =sup1 2 1 Pr1( Reach (R) )
Optimal Strategy: 1 is optimal if
v1(s) = Pr1 (Reach (R))
Values and Strategies.
Pure Memoryless Optimal Strategy exist. [CY 98, FV
97]
Computed by the following linear program.
minimize s x(s) subject to
x(s) ¸ x(s’)
(s,s’) 2 E and s 2 V
x(s) =1/2(x(s’)+x(s’’)) (s,s’), (s’s’’) 2 E and s 2 V°
x(s) ¸ 0
x(s)=1
s2R
A Markov Decision Process.
Target
A Markov Decision Process.
S0
Target
S1
Pure Memoryless Optimal Strategy.
At s0 the player chose s1 and at s1 the
play reaches R with probability ½.
Hence the probability of not reaching R
in n steps is (1/2)n.
As n ! 1 this is 0 and hence the player
can reach with probability 1.
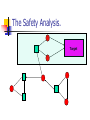
The Safety Analysis.
Target
The Safety Analysis.
Target
The Safety Analysis.
Target
The Safety Analysis.
Consider the random player as an
adversary.
Then there is a choice of successors
such that the play will reach the target.
The probability of the choice of
successors is at least (1/2)n .
The Key Fact.
The Fact about the Safety Game:
If the MDP is a safety game for the player
and it loses with probability 1.
The number of nodes is n.
Then the probability to reach the target
within n steps is at least (1/2)n.
MDP’s.
Pure Memoryless Optimal Strategy
exists.
Values can be computed in polynomial
time.
The Safety game fact.
2-1/2 player games
Simple Stochastic Games.
G=(V,E,(V,V},V°)), Rµ V. [Con’92]
Strategy:
i:V* ¢ Vi ! D(V)
(as before)
Values:
v1(s)= sup1 inf2 Pr1,2(Reach(R))
v2(s)=sup2 inf1Pr1,2(: Reach(R))
Determinacy.
v1(s) + v2(s) =1 [Martin’98]
Strategy 1 for player 1 is optimal if
v1(s) = inf2 Pr1,2(Reach(R))
Our Goal: Pure Memoryless Optimal
Strategy.
Pure Memoryless Optimal Strategy.
Induction on the number of vertices.
Use Pure Memoryless strategy for
MDP’s.
Also use facts about MDP safety game.
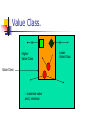
Value Class.
Value Class is the set of vertices with
the same value v1. Formally,
C(p)={ s | v1(s) =p }
We now see some structural property of
a value class.
Value Class.
X
Higher
Value Class
Value Class
maximize value
and } minimize
X
Lower
Value Class
Pure Memoryless Optimal Strategy.
Case 1. There is only 1 value class.
Case a: R = ; any strategy for player }(2)
suffice.
Case b: R ; then since in R player (1)
wins with probability 1 then the values
class must be the value class 1.
One Value Class.
Target (R)
Favorable Subgame for Player 1: One Value Class.
Target (R)
K vertices.
Subgame Pure Memoryless Optimal Strategy.
By Induction Hypothesis: pure memoryless
optimal strategy in the subgame.
Fix the memoryless strategy of the sub-game.
Now analyse the MDP safety game.
For any strategy of player } (2) the probability
to reach the boundaries in k steps is at least
(1/2)k.
Pure Memoryless Optimal Strategy.
The optimal strategy of the subgame
ensures that the probability to reach the
target in original game in k+1 steps is
at least (1/2)k+1.
The probability of not reaching the
target within (k+1)*n steps is
(1-(1/2)k+1)n which is 0 as n ! 1.
More than One Value Class.
X
Higher
Value Class
Value Class
X
Lower
Value Class
More than One Value Class.
Higher
Value Class
Lower
Value Class
More than One Value Class.
Higher
Value Class
Lower
Value Class
Pure Memoryless Optimal Strategy.
Either can collapse a vertex in which
case we can apply induction hypothesis.
Else in no value class there is a vertex
for player 1 (V is empty)
Then it is a MDP and pure memoryless
optimal strategy of MDP suffice.
Computing the values.
Given a vertex s and value v’ if v1(s) ¸ v’
can be achieved in NP Å coNP.
Follows from pure memoryless optimal
strategy and that values of MDP’s can be
computed in polytime.
Algorithms for determining values.
Algorithms [Con’93]
Randomized Hoffman-Karp.
Non-linear programming.
All these algorithms practically efficient.
Open problem: Is there a polytime
algorithms to compute the values?
Limit Average Games.
r: V ! N (zero sum)
The payoff is limit average or mean-payoff
limn! 1 1/n i=1 to n r(si)
Two player mean payoff games can be
reduced to Simple Stochastic Reachability
Game. [ZP’96]
Two player Mean payoff games can be solved
in NP Å coNP.
Polytime algorithm is still open?
Re-Search Story.
2-1/2 Player Limit Average Pure Memoryless Strategy:
Gilette’ 57 : Wrong version of the proof.
Liggett & Lippman’ 69: New Correct Proof.
2 Player Limit Average Pure Memoryless Strategy
Ehrenfeucht & Mycielski ’78: “ didn’t understand”
Gurvich, Karzanov & Khachiyan ’88: “typo”
Zwick & Patterson ’96 : Quasi polynomial time algorithm
Slide Due to Marcin Jurdzinski
N-player games.
Pure Memoryless Optimal Strategy for 2
player zero-sum games can be used to prove
existence of Nash Equilibrium in n-player
games.
Key Idea: Threat Strategy as in Folk Theorem.
[TR’97]
No body has an incentive to change as other will
punish.
We require pure strategy to detect deviation.
Concurrent Games
Concurrent Games.
Previously games were turn-based
either player or player } chose moves
or player ° chose successor randomly.
Now we allow the players to play
concurrently.
G=(S,Moves,1,2,)
i: S ! 2Moves n ;
: S £ Moves £ Moves ! S
A Concurrent Game.
Player 1 plays a,b and player 2 plays c,d
ad,bc
ac,bd
Concurrent games.
Concurrent Game with Reachability
Objective [dAHK’98]
Concurrent Game with arbitrary regular winning objective
[dAH’00,dAM’01]
A Concurrent Game.
Player 1 plays a,b and player 2 plays c,d
ad,bc
Deterministic (Pure) Strategy not Good:
a!d
b!c
ac,bd
A Concurrent Game.
Player 1 plays a,b and player 2 plays c,d
Randomized Strategy :a =1/2, b=1/2
ad,bc
1/2
1/2
ac,bd
c
Using arguments
as before pl.1
wins with prob. 1
1/2
d
1/2
Concurrent Games and Nash equilibrium.
ad
ac,bd
bc
Fact: For any strategy for player 1 he
cannot win with prob. 1.
As long player 1 plays move “a”
deterministically player 2 plays move “d”,
when player 1 plays “b” with positive
probability then player 2 plays “c” with
positive probability.
Thus (1,0) not a Nash Equilibrium.
Concurrent Game and Nash equilibrium.
ad
a !1-
b!
1-
c
d
ac,bd
bc
1-
For every positive player 1 can win with probability
1 -.
Why is “c” better?
If player 2 plays “d” then reaches target
with probability .
Probability of not reaching target in n
steps is (1-)n and this is 0 as n ! 1.
For move “c” player 1 reaches target
with probability (1-)
No Nash Equilibrium.
We saw earlier that (1,0) is not a Nash
equlibrium.
For any positive we have (1-,) is not
a Nash equilibrium as player 1 can
choose a positive ’ < and achieve
(1-’,’)
Concurrent Game: Borel Winning Condition.
Nash equilibrium need not necessarily exist but -Nash
equilibrium exist for 2-player concurrent zero-sum games for
entire Borel hierarchy. [Martin’98]
The Big Open Problem: Existence of -Nash equilibrium for nplayer / 2 player non zero-sum games.
Safety games: n-person concurrent game Nash equilibrium
exist.[Sudderth,Seechi’01]
Existence of Nash equilibrium and complexity issues for nperson Reachability game. (Research Project for this course)
Concurrent Games: Limit Average Winning Condition.
The monumental result of [Vieille’02]
shows -Nash equilibrium exist for 2player concurrent non-zero sum limit
average game.
The big open problem: Existence of Nash equilibrium for n-player limit
average game.
Relevant Papers.
1. Complexity of Probabilistic Verification : JACM’98 –
Costas Courcoubetis and Mihalis Yannakakis
2. The Complexity of Simple Stochastic Games: Information and
Computatyon’92 - Anne Condon
3. On algorithms for Stochastic Games – DIMACS’ 93
Anne Condon
4. Book: Competitive Markov Decision Processes. 1997
J.Filar and K.Vrieze
5. Concurrent Reachability Games : FOCS’98
Luca deAlfaro, Thomas A. Henzinger and Orna Kupferman
Relevant Papers
6. Concurrent - regular Games: LICS’00
Luca deAlfaro and Thomas A Henzinger
7. Quantitative Solution of -regular Games : STOC’01
Luca deAlfaro and Rupak Majumdar
8. Determinacy of Blackwell Games: Journal of Symbolic Logic’98
Donald Martin
9. Stay-in-a-set-games : Int. Journal in Game Theory’01
S. Seechi and W. Sudderth ’01
10. Stochastic Games: A Reduction (I,II): Israel Journal in
Mathematics’02, N. Vieille
11. The complexity of mean payoff games on graphs: TCS’96 U.
Zwick and M.S. Patterson ’96
Thank You !!!
http:www.cs.berkeley.edu/~c_krish/