Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
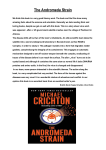
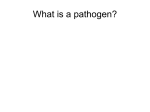
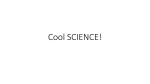
Chapter 6 MATHEMATICAL MODELING AND ANALYSIS OF CANCER VIROTHERAPY INTRODUCTION In this chapter, we study a nonlinear mathematical model for the treatment of cancer by using oncolytic viruses. The interaction between the growing cancer and the replicating oncolytic virus is highly complex and nonlinear. Thus, to precisely define the conditions that are required for successful therapy, mathematical models are needed. Our model builds upon the model of Novozhilov (2006) with a modified functional response. Novozhilov presented a mathematical model that describes the interaction between cancer cells (uninfected cancer cells and infected cancer cells) with ratio dependent functional response between them. We consider a more realistic type of functional response involving measure of immune response to suppress interaction among oncolytic virus and cancer cells. Further, we extend the model to determine the effect of virus specific immune response to cancer cells by the inclusion of a separate variable for immune response. 6.1 MATHEMATICAL MODEL Our model consist of two types of cancer cells x and y growing in logistic fashion. x is the size of uninfected cancer cell population and y is the size of cancer cell population infected with oncolytic virus. Separate equation for viruses is not considered. Cancer cells, infected with oncolytic viruses, further cause infection in other cancer cells through bursting of cancer cells and release of multiple oncolytic 114 virus that are ready to infect other cancer cells susceptible to infection. Based on these assumptions model takes the following form: dx bxy x y r1 x1 , dt K x ya dy bxy x y r2 y1 y , dt K x ya (6.1.1) With initial conditions: x(0) x0 0 and y(0) y0 0. Here r1 and r2 are the maximum per capita growth rates of uninfected and infected cancer cells correspondingly; We assume that r1 r2 , that is cells infected with oncolytic virus grow slowly as compared to uninfected cancer cells that are susceptible to infection, K is the carrying capacity, b is the transmission rate of oncolytic virus infection (this parameter also includes the replication rate of the viruses) ; The expression by , displays saturation effect. Parameter a measures x ya the extent to which immune response provides protection to cancer cells from oncolytic virus. is the rate of infected cell killing by the viruses (cytotoxicity). All the parameters of the model are supposed to be nonnegative. 6.2 BOUNDEDNESS We find the region of attraction in the following lemma. Lemma 6.2: All the solutions of (6.1.1) starting in the positive orthant R 2 either approaches, enter or remain in the subset of R 2 defined by ( x, y) ( R2 : 0 x y K , where R 2 denote the non-negative cone of R 2 including its lower dimensional faces. 115 Proof: From system (6.1.1) we get: dx dy x y (r1 x r2 y )1 y , dt dt K dx dy x y ( x y )1 , dt dt K where max( r1, r2 ). Then by usual comparison theorem, we get the following expression as t , lim sup x(t ) y (t ) K . t Thus, it suffices to consider solutions in the region . Solutions of the initial value problem starting in and defined by (6.1.1) exist and are unique on a maximal interval (Hale, 1980). Since solutions remain bounded in the positively invariant region we infer that the maximal interval is well posed both mathematically and epidemiologically. 6.3 EQUILIBRIUM ANALYSIS System E2 (0, (6.1.1) possess the following equilibria E 0 (0,0), E1 ( K ,0), K (r2 )) and interior equilibrium point E3 ( x , y ) . r2 We will discuss existence of each equilibrium point separately as given below: Existence of E 0 (0,0) : The existence of trivial equilibrium point E 0 (0,0) is obvious. This equilibrium point implies the complete elimination of cancer. Biologically, it means that both infected and uninfected cancer cells can be eliminated with time, and complete recovery is possible because of the virus therapy. 116 Existence of E1 ( K ,0) : The existence of equilibrium point E1 ( K ,0) is obvious. This equilibrium implies the failure of virus therapy. Biologically, it means that both infected and uninfected cancer cells tend to the same state, as they would have been reached without virus administration. Existence of E2 (0, E2 (0, K (r2 )) : It can be checked out that the equilibrium point r2 K (r2 )) exists if r2 . This equilibrium implies complete infection of r2 cancer cells and stabilization of cancer load to a finite minimal size K (r2 ). Biologically, it gives a situation in which cancer load can be reduced to r2 lower size if cancer is detected at an initial stage. Existence of E3 ( x , y ) . To see the existence of interior equilibrium point E3 ( x , y ) we note that x , y are positive solutions of the system of algebraic equations given below: by x y r1 1 0, K x ya (6.3.1) bx x y r2 1 0. K x ya (6.3.2) Now from (6.3.1), we get y 2r1 x r1K ar1 Kb 2r1 x r1K ar1 Kb2 4r12 ( K x)( x a) 2r1 f ( x) 0 Putting value of y in (6.3.2) we have 117 (6.3.3) bx x f ( x) r2 1 0. K ( x f ( x) a ) (6.3.4) To show existence of x it suffices to show that equation (6.3.4) has a unique positive solution. Taking, bx x f (x G ( x) r2 1 , K ( x f ( x) a ) (6.3.5) We note that G (0) r2 r2 f (0) 0, K provided f (0) r2 1 K (6.3.6) and G( K ) bK 0, K a provided bK . K a (6.3.7) Thus, there exists a x in the interval 0 x K such that G( x ) 0. (6.3.8) For x to be unique, we must have dG 0 for x x̂. dx (6.3.9) It is easy to find that (6.3.9) holds if 118 b bx(1 f ( x)) 1 f ( x) r2 at x x . 2 x f ( x) a K ( x f ( x) a) Corresponding value of y is given by y f ( x ). 6.4 LOCAL STABILITY ANALYSIS To discuss the local stability of equilibrium points we compute the variational matrix of system (6.1.1). The signs of the real parts of the eigenvalues of the variational matrix evaluated at a given equilibria determine its stability. The entries of general variational matrix are given by differentiating the right hand side of system (6.1.1) with respect to x, y . The matrix is given by V (E ) x y r1 x by bxy r1 1 K K ( x y a) ( x y a) 2 r y by bxy 2 K ( x y a) ( x y a) 2 rx bxy bx 1 K ( x y a) ( x y a) 2 x y r2 y bxy bx r2 1 K K ( x y a) ( x y a) 2 We denote the variational matrix corresponding to E i by V ( Ei ), i 0,1,2,3 To explore local stability of trivial equilibrium point, we compute variational matrix of E 0 . The variational matrix of equilibrium point E 0 is given by 0 r V ( E0 ) 1 . 0 r2 (6.4.1) Eigenvalues of V ( E 0 ) are given by r1 , r2 . E 0 is an unstable equilibrium point since both the eigenvalues of the matrix are positive. Now, to study the stability behavior of E1 , we compute the variational matrix V ( E1 ) corresponding to E1 as follows: 119 bK r1 r1 K a V ( E1 ) . bK 0 K a (6.4.2) From (6.4.2) we observe that eigenvalues of the matrix V ( E1 ) are given by r1 and bK bK . Existence of interior equilibrium point infers that . Thus, K a K a V ( E1 ) has a positive eigenvalue, consequently E1 is a saddle point in y-direction. Remark: As measure of immune response of the individual to the virus is very less as compared to carrying capacity of tumor cells i.e. a K , inequality bK b. It implies that death rate of infected cells due to the virus attack is K a less than the rate of transmission of infection from virus to the uninfected cells. However, if b then all the infected cells would die without having time to infect other cells and cancer cells grow unaffectedly. K The variational matrix of equilibrium point E2 0, (r2 ) is given by r2 bK (r2 ) r1 r K (r ) ar 2 2 M2 2 r bK (r2 ) 2 K (r2 ) ar2 . (r2 ) 0 (6.4.3) From (6.4.3) we observe that eigenvalues of the matrix V ( E2 ) are given by r1 bK (r2 ) (r2 ). Thus V ( E 2 ) has negative eigenvalues r2 K (r2 ) ar2 and and E 2 is stable equilibrium point if K (r2 ) r1 bK (r2 ) or a (br2 r1 ) a . r2 K (r2 ) ar2 r1r2 120 consequently, E 2 is a saddle point if a K (r2 ) (br2 r1 ) a . r1r2 Where, br2 r1 because r2 r1 (by assumption) and b (existence of E . ) Remark: Stability condition a a of equilibrium E 2 implies that all the cancer cells may become infected if measure of immune response to cancer cells infected with oncolytic virus is less than a particular value a . Variational matrix of E3 ( x , y ) is given by P V ( E3 ) by Q ( x y a) where, P r1 P bx ( x y a) Q (6.4.4) x bx y y bx y , Q r2 . K ( x y a) 2 K ( x y a) 2 From variational matrix V ( E 3 ), we find that eigenvalues are where 2 bx y (r r ) r x r2 y 1 r1 x r2 y ab 2 x y 1 2 1 4 ( x y a) K ( x y a) 3 2K 2 K The signs of the real parts of and are negative. This implies that E3 is always locally asymptotically stable if it exists. 6.5 GLOBAL STABILITY ANALYSIS We prove global stability of (6.1.1) using Bendixon-Dulac criteria. If we choose D( x, y) 1 xy as Dulac function and denoting bxy x y r1 x1 P ( x, y ) K x ya 121 bxy x y r2 y1 y Q ( x, y ) K x ya then ( PD) ( PD) 1 r1x r2 y 0, x x Kxy (x,y) Ω . This implies that interior equilibrium point E3 ( x , y ) is globally asymptotically stable. 6.6 MODELING THE EFFECT OF ONCOLYTIC VIRUS ON CANCER CELLS IN THE PRESENCE OF VIRUS-SPECIFIC IMMUNE CELLS In this section, we consider the role of virus specific immune response in the cancer cells and oncolytic virus interaction. The model has three variables: two variables x and y for cancer cells uninfected and infected with oncolytic virus respectively and the third variable is for virus specific immune cells z . The Cytotoxic T Lymphocyte response (CTL) or immune response is modeled according to predator-prey dynamics. In addition to the assumptions made in modeling the system (6.1.1), we make the following assumptions: Upon exposure to virus as a foreign particle in the body, the CTL proliferates and kill oncolytic viruses replicating inside the cancer cells. There are many different functional responses that can be used to model immune response dynamics; however, the exact functional response that would be applicable is currently not known. So, we use here a relatively simple bilinear functional response. It is directly proportional to the population of oncolytic virus inside the body or the density of cancer cells infected with oncolytic virus, y , and the population of CTL, z . 122 We analyse a density dependent growth of immune response that declines with an increase in the ratio of CTL to virus load and stops if that crosses a threshold. In biological terms, such dynamics may be due to dilution of cytokines or spatial interference if the CTL population becomes much larger than the number of infected cells. It is expressed as cz1 z , a similar growth rate has been taken y w in (Hassel, 1981), for describing predator interference in ecology. In the absence of infection, the CTL may persist at background level, corresponding to the population of recirculating CTLs. The parameter determines the level of CTLs in the absence of infection and may be connected to immunological memory. Based on these assumption model takes the following form: dx x y bxy r1 x(1 ) , dt K x ya dy x y bxy r2 y (1 ) y yz, dt K x ya dz z dz. cz1 dt y w (6.6.1) With initial conditions: x(0) x0 0, y(0) y 0 0 and z (0) z 0 0. is the cytotoxicity rate of CTLs on interaction with cancer cells containing virus. c is the intrinsic growth rate, is the intraspecific competition rate and d is the cell lysis rate of immune cells or CTLs. All the parameters of the model are supposed to be nonnegative. 6.7 BOUNDEDNESS OF SOLUTIONS Lemma 6.7.1.: All the solutions of the system (6.6.1) starting in the positive orthant R3 either approaches, enter or remain in the subset of R3 defined by 123 (c d )( K w) 1 ( x, y, z ) R3 : 0 x y K ,0 z ,c d c where R3 denote the non-negative cone of R 3 including its lower dimensional faces. Proof: From system (6.6.1) we get: dx(t ) dy (t ) x y (r1 x r2 y )1 y , dt dt K dx(t ) dy (t ) x y ( x y )1 , dt dt K where max( r1 , r2 ) , then by usual comparison theorem, we get the following expression as t , lim sup x(t ) y (t ) K . t Similarly, from third equation of system (6.6.1) we have, lim sup z (t ) t (c d )( K w) , c d. c Thus, it suffices to consider solutions in the region 1 6.8 EQUILIBRIUM ANALYSIS System (6.6.1) possess the following equilibria: K (c d ) w (c d ) w E0 (0,0,0), E1 0,0, , E2 ( K ,0,0), E3 K ,0, , E4 0, (r2 ),0 , c c r2 E5 0, y , z , E6 ( xˆ, yˆ ,0) and E7 ( x , y , z ). (c d ) r2 c , z (c d ) K (r2 ) r2 w Where y K (c d ) K r2 c (c d ) K r2 c and xˆ, yˆ are positive solutions of the first two equations of system of algebraic equations (6.6.1) 124 and E7 ( x , y , z ) is the interior equilibrium. Existence conditions of these equilibria are discussed as under: Existence of E0 (0,0,0) : Existence of trivial equilibrium point E 0 (0,0,0) is obvious. This equilibrium point implies the complete elimination of cancer and absence of active immune cells in the case of no virus specific antigenicity. Biologically, this equilibrium point means that both infected and uninfected cancer cells can be eliminated with time, and complete recovery is possible because of the virus therapy. (c d ) w (c d ) w Existence of E1 0,0, : Existence of equilibrium point E1 0,0, is c c also obvious. It corresponds to the elimination of cancer cells due to active proliferation of CTLs under the condition c d . Thus, existence of this equilibrium point implies that active proliferation of immune cells can be helpful in eliminating cancer. Existence of E2 ( K ,0,0) : This equilibrium point implies failure of virus therapy. It means that that uninfected and infected cancer cells tend to the same state, as they would have been reached without virus administration and virus specific antigenicity. (c d ) w Existence of E3 K ,0, : It corresponds to failure of virus therapy and c immune response in killing cancer cells. It may be due to excessive killing of virus by immune cells resulting in the death of infective cells without having time to infect other cells. 125 K Existence of E4 0, (r2 ),0 : It can be checked out that the equilibrium point r2 K E4 0, (r2 ),0 exists if r2 . This equilibrium implies complete infection of r2 cancer cells and stabilization of cancer load to a finite minimal size K (r2 ) in the r2 absence of virus specific antigenicity. Here cancer load, x y is given by K (r2 ) r2 from which we observe that as cytotoxicity rate of virus increases, cancer load decreases but it should not exceed growth rate of cancer cells infected with oncolytic virus. Existence of E5 0, y , z , w(c d ) r2 c and z (c d ) K (r2 ) r2 w : It corresponds to virus y K r c (c d ) K (c d ) K 2 r2 c replication in the presence of virus specific immune response. In this case cancer load w(c d ) r2 c . From the expression of cancer load we is given by x y y K (c d ) K r2 c infer that cancer load decreases with the increase in . Biologically, it can be interpreted that cancer load decrease with the increase in the rate at which immune cells destroy cancer cells infected with oncolytic virus. Existence of E6 xˆ , yˆ ,0 : Proof for the existence of interior equilibrium point E6 xˆ , yˆ ,0 is equivalent to the proof for existence of E3 ( x , y ) in section 6.3. 126 Existence of E7 ( x , y , z ) : Similarly, to see the existence of interior equilibrium point E7 ( x , y , z ) we note that x , y and z are positive solutions of the system of algebraic equations given below: by x y r1 1 0 K x ya (6.8.1) bx x y r2 1 z 0 K x ya (6.8.2) z d 0 c1 y w (6.8.3) Now from (6.8.1), we get y 2r1 x r1K ar1 Kb 2r1x r1K ar1 Kb2 4r12 ( K x)( x a) 2r1 f ( x) wc d . Equation (6.8.3) gives z c f ( x) 0. Putting value of y and z in (6.8.2) we have bx x f (x r2 1 f ( x) wc d 0. K ( x f ( x) a) c (6.8.4) To show existence of x , it suffices to show that equation (6.8.4) has a unique positive solution. Taking H ( x) r2 (1 x f (x bx ) f ( x) wc d , K ( x f ( x) a ) c we note that f (0) H (0) r2 1 f (0) wc d 0 (Using (6.3.6)), K c and H ( K ) bK w(c d ) 0 K a c 127 (6.8.5) provided, bK w(c d ) . K a c (6.8.6) Thus, there exists a x in the interval 0 x K such that H ( x ) 0. For x to be unique, we must have dH 0 for x x . dx Corresponding value of y and z is given by f ( x ) w c d y f ( x ) and z . c 6.9 LOCAL STABILITY ANALYSIS We compute the variational matrix of system (6.6.1) to discuss the local stability of equilibrium points. The signs of the real parts of the eigenvalues of the variational matrix evaluated at a given equilibria determine its stability. The entries of general variational matrix are given by differentiating the right hand side of system (6.6.1) with respect to x, y and z . We denote the variational matrix corresponding to E i by V ( Ei ), i 01,2,3,4,5,6,7. To explore local stability of trivial equilibrium point, we compute variational matrix of E 0 . The variational matrix of equilibrium point E 0 is given by 0 r1 V ( E0 ) 0 r2 0 0 0 0 . c d (6.9.1) Here, the three eigenvalues of V ( E0 ) are given by 1 r1 , 2 r2 and 3 c d . It can be easily observed that all the three eigenvalues are positive if equilibrium points E 4 and E1 (or E3 ) exist respectively. Thus E 0 is an unstable equilibrium point. 128 Now, to study the stability behavior of E1 we compute the variational matrix V ( E1 ) corresponding to E1 as follows: 0 r1 V ( E1 ) 0 r2 0 0 0 0 . (c d ) (6.9.2) From (6.9.2) we observe that eigenvalues of the matrix V ( E1 ) are given by 1 r1 , 2 r2 and 3 (c d ). Here 3 is negative but 2 is positive by virtue of existence condition of E 4 . 1 is also a positive eigenvalue. Therefore E1 is a saddle point if equilibrium point E 4 exists. The variational matrix of equilibrium point E2 ( K ,0,0) is given by bK r1 r1 K a bK V ( E2 ) 0 K a 0 0 0 0 c d (6.9.3) From (6.9.3) we observe that eigenvalues of the matrix V ( E2 ) are given by 1 r1 , 2 bK Ka and 3 c d . We observe that 2 and 3 are positive if equilibrium points E 6 and E1 (or E3 ) exist respectively. Thus E 2 is a saddle point. (c d ) w Variational matrix of E3 K ,0, is given by c r1 V ( E3 ) 0 0 bK K a bK w(c d ) K a c 2 (c d ) c r1 0 . (c d ) 0 129 (6.9.4) From variational matrix 2 V ( E 3 ), we find that eigenvalues are 1 r1 , bK w(c d ) and 3 (c d ). K a c We observe that 2 bK w(c d ) 0 if equilibrium point E 7 exists. Thus K a c E3 is a saddle point and it is unstable equilibrium point. K Variational matrix of E4 0, (r2 ) is given by r2 bK (r2 ) r1 r K (r ) ar 2 2 2 bK ( r ) 2 V ( E 4 ) r2 K (r2 ) ar2 0 0 (r2 ) 0 . 0 c d 0 (6.9.5) We see that E 4 is a saddle point if E1 or E3 exists, as its one of the three eigenvalues c d is positive. Thus E 4 is an unstable equilibrium point. Now, to study the stability behavior of E5 0, y , z we compute the variational matrix V ( E5 ) corresponding to E5 as follows: r1 1 y by K ya y by V ( E5 ) r2 K ya 0 0 r2 y K cz 2 ( y w) 2 0 y . cz y w (6.9.6) From (6.9.6) we observe that one of the eigenvalues of the matrix V ( E5 ) given by 1 r1 1 y by is positive as it is the growth rate of x at E5 , implying that K ya E5 is unstable. 130 The variational matrix of equilibrium point E6 ( xˆ , yˆ ,0) is given by Pˆ byˆ V ( E6 ) Qˆ xˆ yˆ a 0 Pˆ bxˆ xˆ yˆ a 0 yˆ . c d Qˆ 0 (6.9.7) xˆ bxˆyˆ yˆ bxˆyˆ Where Pˆ r1 and Qˆ r2 . K ( xˆ yˆ a) 2 K ( xˆ yˆ a) 2 From V ( E6 ) we observe that one of the eigenvalues given by 3 c d is positive. Thus E 6 is locally asymptotically unstable equilibrium point. Variational matrix of E7 ( x , y , z ) is given by P by V ( E7 ) Q x y a 0 P bx x y a Q R z y w 0 y . R (6.9.8) Where, x bx y y bx y cz P r1 , Q r2 . and R K ( x y a) 2 K ( x y a) 2 y w The characteristic equation for the variational matrix given in (6.9.8) is 3 M12 M 2 M 3 0, (6.9.9) Where, M 1 ( P Q R ), r x r2 y cz 1 0. K y 131 bx by R y z Q M 2 P Q Q R R P P , ( y ) x y a x y a cz (r1 x r2 y ) ( y )K 2 cz y ( y ) 2 ab 2 x y ( x y a) 2 (r1 r2 )bx y K ( x y a) 0, for r1 r2 . bx by P R y z Q P Q R M 3 R P , x y a x y a ( y ) 2 (r1 r2 )bx y r1 x y z ab 2 x y bx y z . 3 2 ( y ) K ( x y a) ( x y a) K ( y ) ( x y a) ( y w) cz By Routh – Hurwitz criteria, if M 1 , M 3 0 and M 1M 2 M 3 , (6.9.10) then all roots of equation (6.9.9) have negative real parts and E7 ( x , y , z ) is locally asymptotically stable equilibrium point. However, in our case M 1 0 for all parameter values thus condition (6.9.10) reduces to the condition, 0 M 3 M 1M 2 . (6.9.11) 6.10 NUMERICAL SIMULATION The model is studied numerically to substantiate the above analytical findings. The system of differential equations is integrated using fourth order Runge-Kutta method. First we consider system (6.1.1) with the help of following hypothetical parameters: r1 5, K 10, b 0.03, a 0.05, r2 0.5, 0.003. The equilibrium points for this set of parameters are: E 0 (0,0), E1 (10,0), E2 (0,9.94) and E3 (0.05, 9.93). 132 (6.10.1) It is found that all the conditions for local and global stability of interior equilibrium point are satisfied for above parameter values. Figures have been plotted between dependent variables and time for different parameter values to show changes occurring in population level of cells with time considering initial values (1,1). Fig.1 shows the dynamics of cancer cells uninfected and infected with oncolytic virus. It is observed from the figure that infected cancer cell population first rise and then attain a constant equilibrium value whereas uninfected cancer cell population first rise abruptly and then decrease due to virus infection and cytotoxicity to attain its equilibrium value. Fig.1, Variation of x(t ), y(t ) with time for parameter values given in (6.10.1) In Fig. 2, variation of cancer cells with time for different replication rate of oncolytic virus, b , is determined. It is observed that as b increases, infected cancer cells increase and uninfected cancer cells decrease. This behavior of cancer cells supports the fact that replication of oncolytic virus within cancer cells and their transmission to other cancer cells is responsible for the infection among more cancer 133 cells and hence increase in the number of infected cancer cells. In this process number of uninfected cancer cells decrease automatically. 10 9 8 x(t) for b = 0.03 y(t) for b = 0.03 x(t) for b = 0.06 y(t) for b = 0.06 7 x(t),y(t) 6 5 4 3 2 1 0 0 100 200 300 400 500 Time (t) Fig.2, Variation of x(t ), y(t ) with time for different value of b and other values of parameters are same as (6.10.1) Fig.3, Variation of x(t ), y(t ) with time for different value of and other values of parameters are same as (6.10.1) Fig. 3 displays variation of cancer cells with time for different cytotoxicity rate, , of oncolytic virus. We observe that as increase infected cancer cells 134 decrease on the other hand uninfected cancer cells increase. Equilibrium level of infected cancer cells decrease because oncolytic virus kill cancer cells by infecting them. But it is not able to annihilate the proliferation of new cancer cells. Therefore, number of uninfected cancer cells keep on proliferating in the human body. In addition to the values of parameters given in (6.10.1), we choose following more parameters for the model with virus specific immune response. 0.91, d 0.1, c 1, 1.2, 0.01. (6.10.2) The interior equilibrium point for this system is x 9.9616, y 0.0382, z 0.0294. It is found that all the conditions for local asymptotic stability of interior equilibrium point are satisfied for above parameter values given in (6.10.1) and (6.10.2). The eigenvalues for the system are as follows, - 1.4536, - 0.9424, - 0.0001. Negative eigenvalues predict the local asymptotic stability of the system. It is observed that presence of virus specific immune cells results into considerable decrease in the number of infected cancer cells. It demonstrates the fact that patient’s own immune system destroys the virus and removes them from the body and prohibits virus to annihilate cancer cells proliferation. It implies that modified oncolytic virus that are less susceptible to immune suppression decrease cancer cells in the human body. In Figs. 4 and 5, variation of infected cells with time for different replication or infection transmission rate and different cytotoxicity rate of oncolytic virus is determined. It is observed that infected cells increase with the increase replication rate of oncolytic virus and decrease with the increase in cytotoxicity rate of oncolytic virus. If we compare this result of two models (6.1.1) and (6.6.1), it is observed that in the presence of virus specific immune cells quantitative values of cancer cells infected 135 with oncolytic virus differ considerably but qualitative behavior remains similar. It is inferred that presence of virus specific immune cells causes significant suppression in the density of infected cancer cells. Fig.4, Variation of y (t ) with time for different value of b and other values of parameters are same as (6.10.1) and (6.10.2) Fig.5, Variation of y (t ) with time for different value of and other values of parameters are same as (6.10.1) and (6.10.2) Our main objective is to explore the conditions for decreasing cancer load in the body. For this, we increase value of replication rate of oncolytic virus from 136 b 0.03 to b 0.8 in Fig. 6. We found that cancer load starts decreasing for b 0.8 and then on further increasing b , cancer load keeps on decreasing until b 6 . Further increase in value of b does not make any significant change in the equilibrium level of cancer load. Thus, biologically, we interpret that for high replication rate of virus, cancer load decreases. In fact, there is a range 0.8 b 6 between which replication of oncolytic virus produces significant effect on cancer cells and decreases cancer load in the patient’s body. Fig.6, Variation of cancer load x(t ) y(t ) with time for different value of b and other values of parameters are same as (6.10.1) and (6.10.2) Further, for a higher value of replication rate of oncolytic virus, that is for b 4 , we increased cytotoxicity rate of oncolytic virus (Fig. 7) and observed that cancer load increase with the increase in cytotoxicity rate . In this case, all the cancer cells are killed by virus so fast that virus do not get time to replicate and spread in other cancer cells and virus therapy fails. 137 Fig.7, Variation of cancer load x(t ) y(t ) with time for b 4 and different value of and other values of parameters are same as (6.10.1) and (6.10.2) For b 6 , we increased value of (as shown in Fig. 8) and observed that cancer load decreased. Cancer load decreased on increasing from 0.003 to 0.3 and then from 1, it again starts increasing. Thus, we observe that cancer load decrease for high replication rate of oncolytic virus and cytotoxicity rate of cancer cells lying in within the range 0.003 1 . Fig.8, Variation of cancer load x(t ) y(t ) with time for b 6 and different value of and other values of parameters are same as (6.10.1) and (6.10.2) 138 6.11 CONCLUSION In this chapter, we have studied two nonlinear models to examine the interaction of oncolytic virus with cancer cells in the absence and presence of virus specific immune cells. The positive equilibrium points of the system are investigated. The stability and instability of the equilibrium points of the system are studied using the linear stability approach. To substantiate the analytical findings, the model is studied numerically and for which the system of differential equation is integrated using fourth order Runge-Kutta method, which supports the theoretical findings. The first model has two differential equations dealing with the interaction of cancer cells with oncolytic virus without considering the presence of immune response in the body. It is observed that replication rate of oncolytic virus within cancer cells and cytotoxicity rate of cancer cells by oncolytic virus play important role in dynamics of the system. The second model has three differential equations and takes into consideration the effect of immune response on oncolytic virus. It is observed from numerical analysis that in the presence of virus specific immune cells, quantitative values of cancer cells infected with oncolytic virus decreases considerably but its qualitative behavior remains same as in model without immune response. We have found that cancer load decreases for high replication rate of oncolytic virus. However, for high replication rate, cancer load decreases for a large value of cytotoxicity rate of cancer cells by oncolytic virus in a given range and beyond this range cancer load again starts rising. 139