Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Electromagnetism wikipedia , lookup
Coriolis force wikipedia , lookup
N-body problem wikipedia , lookup
Lorentz force wikipedia , lookup
Woodward effect wikipedia , lookup
Artificial gravity wikipedia , lookup
Roche limit wikipedia , lookup
Centrifugal force wikipedia , lookup
Fictitious force wikipedia , lookup
Relativistic angular momentum wikipedia , lookup
Torque wrench wikipedia , lookup
Modified Newtonian dynamics wikipedia , lookup
Negative mass wikipedia , lookup
Newton's law of universal gravitation wikipedia , lookup
Friction-plate electromagnetic couplings wikipedia , lookup
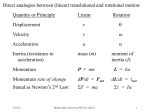
Torque • What is the best way to loosen a bolt using a wrench? • Notice that where you exert the force matters! • Which of the following forces is most likely to loosen the bolt (assuming they all have the same magnitude): Bolt Answer: Force C, because the tendency of a force to cause a rotation about some point depends on its magnitude and the perpendicular distance l between the line of action of the force and that lC point Point about which bolt rotates Line of action of force A Line of action of force B A (lA = 0) Line of action of force C lB B C Torque • The distances lA, lB, and lC are called the lever arms (or moment arms) of forces A, B, and C (respectively) about the point of rotation • Torque (or moment) is a “twist” or a “turn” associated with a force and has a magnitude defined by: t = FlF – It is always defined with respect to a specific reference point – Note the similarity to force (a “push” or a “pull”) – Torque is the rotational analog of force • The torques associated with forces A, B, and C (see previous slide) with respect to the rotation point of the bolt are: tA = 0 , tB = BlB , and tC = ClC • Since the magnitudes of forces B and C are the same and lC > lB , then tC > tB Torque • Forces B and C both tend to cause a counterclockwise rotation, which we can define to be the positive sense of rotation: – Thus tB and tC are both positive + • However, a force directed in the opposite direction as B or C (tightening the bolt) would tend to cause a clockwise rotation, and the torque associated with this force would be negative • When a force acts in some arbitrary direction: r f F f lF Line of action of force F lF = lever arm of force F = rsinf Torque • The magnitude of the torque associated with force F is: t = FlF = Frsinf • Torque is a vector quantity it has a magnitude and a direction – Direction is perpendicular to both the position ( r ) and force ( F ) vectors • The direction of torque is given by the Right-Hand Rule: – Point fingers of right hand in direction of position vector (begins at reference point and ends where F acts) – Curl fingers toward direction of the force – Thumb points in direction of the torque • In the last example (see previous slide), torque points into of the page (or screen) – tends to cause clockwise rotation CQ1: If all the forces below have equal magnitude, which one creates the most torque? A) B) C) D) Figure A Figure B Figure C Figure D CQ2: A carpenter who is having a difficult time loosening a screw puts away his screwdriver and chooses another with a handle with a larger diameter. He does this because: A) B) C) D) increasing force increases torque. decreasing force decreases torque. increasing lever arm increases torque. decreasing lever arm decreases torque. Center of Mass • Note that weight doesn’t act at a single point – it is distributed over the entire body • However, we can always calculate the torque due to a body’s weight by assuming that the entire force of gravity (weight) is concentrated at a single point called the center of gravity • If the acceleration of gravity has the same value at all points on a body, its center of gravity is identical to its center of mass (where all mass of object is considered concentrated at a single point) • A good assumption, considering that g at the bottom of the Sears Tower in Chicago is only about 0.014% greater than at the top – Center of gravity only about 2 cm below center of mass Center of Mass m2 • For a system of point particles: m1 • The center of mass of the system is the point in space having coordinates (xCM, yCM) defined by: mx m x m x m x m m m m i i xCM 1 1 2 2 1 2 3 3 i 3 i i my m y m y m y m m m m i yCM 1 1 2 1 2 2 3 3 i i 3 i i – Average position of set of particles, weighted by their masses – Coordinates where all the mass of entire system can be considered to be concentrated m3 Center of Mass • Sometimes can use symmetry to deduce position of center of mass • Where would center of mass be for the previous system of 3 equally-spaced point masses if m1 = m2 = m3 ? m1 m2 m3 center of mass • For solid bodies (which are a continuous distribution of matter), the sums given earlier would be impractical • Center of mass can usually be deduced from symmetry Homogeneous solid sphere: CM at center of sphere Donut: CM at center of donut hole CQ3: The system below consists of three spheres of equal mass m. The center of mass of the system is located at point: A) B) C) D) 3 4 5 6 Equilibrium of a Rigid Body • We can apply Newton’s 1st law two different ways to a rigid body when it is in equilibrium • For translational equilibrium: F 0 – Linear acceleration a 0 • For rotational equilibrium: – Angular acceleration 0 t 0 Example Problem #8.17 Consider the model at right of a person bending forward to lift a 200-N object. The spine and upper body are represented as a uniform horizontal rod of weight 350 N, pivoted at the base of the spine. The erector spinalis muscle, attached at a point 2/3 of the way up the spine, maintains the position of the back. The angle between the spine and this muscle is 12.0°. Find the tension in the back muscle and the compressional force in the spine. Solution (details given in class): l 2l/3 l/2 y + T = 2.71 103 N = 2.71 kN Rx = 2.65 kN (Note that when object is in equilibrium, you have freedom to choose the point about which to calculate the torques.) x CQ4: A sign hangs by a rope attached at 30° to the middle of its upper edge. It rests against a frictionless wall. If the weight of the sign were doubled, what would happen to the tension in the string? (Note: sin30° = 0.5; cos30° = 0.87) A) B) C) D) It would remain the same. It would increase by a factor of 1.5. It would increase by a factor of 2. It would increase by a factor of 4. CQ5: A telephone pole stands as shown below. Line A is 4 m off the ground and line B is 3 m off the ground. The tensions in line A and line B are 200 N and 400 N respectively. What is the net torque on the pole? A) B) C) D) 0 Nm 400 Nm 800 Nm 2000 Nm Example Problem #8.23 An 8.00-m, 200-N uniform ladder rests against a smooth wall. The coefficient of static friction between the ladder and the ground is 0.600, and the ladder makes a 50.0° angle with the ground. How far up the ladder can an 800-N person climb before the ladder begins to slip? Solution (details in class): 6.15 m Energy in Rotational Motion • Any matter in motion has kinetic energy • What is the kinetic energy of a rotating rigid body? • Representing the rigid body as the sum of individual point particles, the total kinetic energy of the body is the sum of the individual kinetic energies: K tot 1 1 1 m1v12 m2v22 mi vi2 2 2 i 2 • Each point particle has the same value of w, so: Ki 1 1 mi vi2 mi ri 2w 2 2 2 • Therefore, the kinetic energy of the rigid body is: 1 1 1 K tot mi vi2 mi ri 2w 2 w 2 mi ri 2 2 i i 2 i 2 Moment of Inertia 2 m r • Quantity i i = moment of inertia I of the body i • • • • about a specific rotation axis (ri is distance from object i to the rotation axis) 1 2 Rotational kinetic energy: K R 2 Iw Note similarity to translational (linear) kinetic energy (KT = ½ mv2) Moment of inertia is the rotational analog of mass, and has to do with how mass is distributed Consider 2 dumbbells: Small moment of inertia easy to start or stop rotation Large moment of inertia difficult to start or stop rotation Moment of Inertia • For continuous distributions of matter (spheres, rods, cylinders, etc.), one would need methods of calculus to calculate moments of inertia • Moments of inertia of some common objects given in Table 8.1, p. 241 in textbook • Note that moment of inertia depends on how the mass is distributed and on the location of the axis of rotation Total Mechanical Energy of Rigid Bodies • Rigid bodies can have rotational and/or translational (linear) kinetic energy 1 2 (v = velocity of center of mass) K T mvcm cm 2 1 2 K R Iw 2 • The rigid body could also have gravitational potential energy Ug = Mgycm (ycm = vertical position of center of mass) • In general, total mechanical energy of rigid body is thus: K1T + K1R + U1 = K2T + K2R + U2 • If work is done by non-conservative forces (like friction): K1T + K1R + U1 + Wnc = K2T + K2R + U2 Newton’s 2nd Law for Rotation: Dynamics • Newton’s Law for linear motion: F ma • Rotational analog for rigid bodies: 2nd – Notice the strong similarity to the linear version of Newton’s 2nd Law! 2nd • Newton’s Law for translation of a rigid body: t I F macm – Depends on acceleration of the center of mass • Remember also the strong similarity between translational (KT) and rotational (KR) kinetic energy: 1 2 K T mvcm 2 (For a rolling rigid body, I = Icm) 1 2 K R Iw 2 Example Problem: Ball Rolling Down an Incline A ball of mass m and radius R starts from rest at a height of 2.00 m and q rolls without slipping down a 30.0° slope as shown. Determine the linear acceleration of the ball down the incline. Solution (details given in class): 3.50 m/s2 CQ6: In a lecture demonstration, Dr. Kaye “races” a solid sphere, a solid disk, and a thin cylindrical shell (hoop) by releasing them from rest at the top of an inclined plane of height h. In what order will the objects reach the bottom of the incline? A) B) C) D) E) F) Sphere, disk, hoop Sphere, hoop, disk Disk, sphere, hoop Disk, hoop, sphere Hoop, sphere, disk Hoop, disk, sphere Objects Rolling Down Incline Interactive Example Problem #8.40 An Atwood’s machine consists of blocks of masses m1 = 10.0 kg and m2 = 20.0 kg attached by a cord running over a pulley as shown. The pulley is a solid cylinder with mass M = 8.00 kg and radius r = 0.200 m. The block of mass T1 T 2 m2 is allowed to drop, and the cord turns the pulley without slipping. (a) Why must the tension T2 be greater than the tension T1? (b) What is the acceleration of the system, assuming the pulley axis is frictionless? (c) Find the tensions T1 and T2. Solution (details given in class): (b) 2.88 m/s2 (c) T1 = 127 N, T2 = 138 N CQ7: Interactive Example Problem: The Flywheel Elevator What is the student’s linear speed after falling 5.0 m, just before she reaches the ground? A) 1.0 m/s B) 5.0 m/s C) 10 m/s D) 25 m/s (ActivPhysics Online Problem #7.10/7.12, Pearson/Addison Wesley) Angular Momentum • The rotational analog of linear momentum is angular momentum, defined by: L Iw – Note similarity to linear relation p = mv – Angular momentum is a vector quantity – Direction is the same as w p • Remembering Newton’s 2nd law written as: F t we have the following rotational analog: L t t • If the net torque acting on a body is t L 0 zero, then: t – Angular momentum is constant in time, or conserved – Statement of conservation of angular momentum – Note similarity to conservation of linear momentum Example Problem #8.60 A playground merry-go-round of radius 2.00 m has a moment of inertia I = 275 kgm2 and is rotating about a frictionless vertical axle. As a child of mass 25.0 kg stands at a distance of 1.00 m from the axle, the system (merry-go-round and child) rotates at the rate of 14.0 rev/min. The child then proceeds to walk toward the edge of the merry-go-round. What is the angular speed of the system when the child reaches the edge? Solution (details given in class): 1.17 rad/s