Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Center of mass wikipedia , lookup
Coriolis force wikipedia , lookup
Jerk (physics) wikipedia , lookup
Old quantum theory wikipedia , lookup
Eigenstate thermalization hypothesis wikipedia , lookup
Internal energy wikipedia , lookup
Photon polarization wikipedia , lookup
Classical mechanics wikipedia , lookup
Fictitious force wikipedia , lookup
Kinetic energy wikipedia , lookup
Theoretical and experimental justification for the Schrödinger equation wikipedia , lookup
Centrifugal force wikipedia , lookup
Newton's theorem of revolving orbits wikipedia , lookup
Relativistic angular momentum wikipedia , lookup
Work (thermodynamics) wikipedia , lookup
Moment of inertia wikipedia , lookup
Mass versus weight wikipedia , lookup
Relativistic mechanics wikipedia , lookup
Hunting oscillation wikipedia , lookup
Equations of motion wikipedia , lookup
Centripetal force wikipedia , lookup
Classical central-force problem wikipedia , lookup
Newton's laws of motion wikipedia , lookup
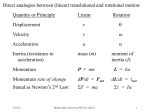
Chapter 9 What causes a change of motion? In linear motion, we discussed the fact that the net force acting on an object causes a change in motion. When considering rotational motion, we need to discuss the cause of angular acceleration. Consider the following situation •If both forces represent equal magnitudes, what will the difference in motion be? •α is proportional to force •α is also proportional to the perpendicular distance from the axis of rotation to the line along which the force acts •the LEVER ARM or MOMENT ARM is this perpendicular distance Lever Arm – more specifically, the distance which is perpendicular both to the axis of rotation and to an imaginary line drawn along the direction of the force. Which force is most effective? Why? It may be conceptually easier to solve for F⊥ than for r⊥. Either way, your product will be the same because the force acts along the lever arm, so sinθ will be the same. If more than one torque acts on a body, α is proportional to the net torque + counterclockwise - Clockwise SI unit for torque is mN τ = r⊥F τ = rF⊥ τ = rFsinθ • • • • • A body is in equilibrium when the sum of the external forces is zero and when the sum of the external torques is zero. In other words…∑τ = 0 Hint: When acceleration is zero the net force and in the case of rotational motion, net torque is zero. Remember the lever arm must be determined relative to the axis of rotation. In problem solving, choosing the direction of an unknown force backward in the free-body diagram simply means that the value determined for the force will be a negative number. The center of gravity of a rigid body is the point at which its weight can be considered to act when the torque to the weight is being calculated. When weight is the force causing torque, the center of gravity will be the geometric center for objects with symmetrical shaped and weight distributed uniformly. Here τ = W(L/2) When finding cg for more than one object, as in the diagrams, calculate the net torque created by the board and box about an axis that is picked arbitrarily to be at the right end of the board. x cg W1 X 1 W2 X 2 ... W1 W2 ... If the distribution of weight changes, the equilibrium may be “knocked off balance.” Relating Newton’s 2nd Law for tangential force and acceleration to torque, we can derive a rotational motion equation for Newton’s 2nd Law. Use rad/s2 (mr ) 2 • • • When using F=ma, we are describing a single particle. When using equations relating to torque, it is often convenient to describe the object rotating about an axis as a whole. The moment of inertia can be used to describe any object rotating about a fixed axis, not just a particle. I mr 2 SI unit for I is kgm2 Recall that all mass has inertial properties. The rotational analogy to mass is the moment of inertia. The sum of the individual moments of inertia of all the particles will yield the moment of inertia of the body. Table 9.1 on pg. 262 summarizes equations for I specific derived for specific shapes. I α must be expressed in rad/s2 Definition of Rotational Work The rotational work Wr done by a constant torque in turning an object through an angle. θ must be in radians SI Unit: joule (j) W r Definition of Rotational Kinetic Energy • The rotational kinetic energy KER of a rigid object rotating with an angular speed ω about a fixed axis and having a moment of inertia can be derived using rotational variables. • ω must be in rad/s •SI unit: joule (j) 1 2 KER I 2 Recall the law of conservation of energy can be applied to mechanical energy In the past we used total mechanical energy as kinetic energy + potential energy. The real story for objects experiencing rotational energy is that the total mechanical energy will be equal to kinetic energy + rotational kinetic energy + potential energy 1 1 2 2 ET mv I mgh 2 2 When a hollow cylinder and a solid cylinder are rolled down an incline, the solid cylinder will reach the bottom first. This will happen because the solid cylinder will have a greater translational speed. Linear momentum can be expressed as the product of mass x velocity. For rotational motion, the analogous concept is angular momentum (L). Again, ω must be expressed in rad/s. SI unit: kgm2/s L I The total angular momentum of a system remains constant (is conserved) if the net average external torque acting on the system is zero. An ice skater will have a higher angular velocity when she bring her arms inward because she is decreasing her radius, thus decreasing her moment of inertia. L f Li