Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Zinc finger nuclease wikipedia , lookup
DNA repair protein XRCC4 wikipedia , lookup
DNA sequencing wikipedia , lookup
Homologous recombination wikipedia , lookup
DNA replication wikipedia , lookup
DNA profiling wikipedia , lookup
DNA polymerase wikipedia , lookup
Microsatellite wikipedia , lookup
DNA nanotechnology wikipedia , lookup
Journal of Theoretical and Applied Information Technology
© 2005 - 2009 JATIT. All rights reserved.
www.jatit.org
ARTIFICIAL HYBRIDIZATION OF DNA STRANDS AND
EMBEDDED SYSTEMS
J. C. HERRERA, J. A. ALVAREZ, I. RIVERA, M. OLGUIN
Center for Innovation and Development in Computer Technology, National Polytechnic Institute
Centro de Innovación y Desarrollo Tecnológico en Cómputo, Instituto Politécnico Nacional
Unidad Profesional Adolfo López Mateos, Edificio del CIDETEC, Mexico, D. F., 07700
E-mail: {jlozada; jaalvarez; irivera; molguin}@ipn.mx
ABSTRACT
This paper introduces artificial hybridization of DNA strands as a bio-inspired alternative for the evaluation
of inference rules in a conventional expert system. Biological hybridization process is a binding event
between two complementary DNA single strands that leads to the formation of a double-stranded helix. The
proposed technique to detect the hybridization is based on direct comparison of data allowing a high degree
of parallelism. It makes an approach to its implementation on a restricted and low-cost architecture like a
commercial microcontroller instances.
Keywords: -Bio-inspired System, Artificial Hybridization of DNA Strands, Expert System, Embedded
system, Microcontroller
number of models and resources of immediate use
to work in autonomous form, as well as a good
performance at low cost.
1. INTRODUCTION
The artificial DNA hybridization suggests a
simple mechanical that compare parallel binary
strands stored in data registers looking for evidence
that they are complementary to each other, to
validate a subsequent action. This criterion is very
similar to the evaluation of inference rules in a
conventional expert system [1]. Although the
majority of contemporary microcontrollers present
Harvard type architecture (separate data and
instructions) and pipeline technology to segment the
execution and data flow, these devices have
restricted architecture due to the procedural
instruction execution, low memory capacity and
limited number of I/O ports.
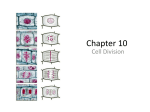
2. BIOLOGICAL PRINCIPLES
DNA (Deoxyribonucleic Acid) is a chemical
substance that is found in the nucleus of cells,
which stores the basic code of all life translated as
biological instructions. The structure of the double
helix of DNA was proposed and described by J.
Watson and F. Cook in 1953. Nowadays this model
is still fundamental in biological analysis indicating
that a molecule of DNA is constituted by two large
strands of nucleotides with opposite poles
(complementing each other) entwined forming a
double helix shape very similar to a twisting
stairway [4]. Each nucleotide consists of a sugar
(deoxyribose), a phosphate group (phosphoric acid)
and a nitrogenous base that can be four different
types: adenine (A), guanine (G), cytosine (C) and
thymine (T). The adenine and guanine both are
purine bases, with a double ring structure, while the
cytosine and thymine both are pyrimidine bases,
with a simple ring structure, as evidenced in
Figure1.
The above paragraph is very important and
directly affects the viability of the embedded
implementation of bio-inspired architecture with
microcontrollers, as it is imminently parallel nature,
so that implementation on a reconfigurable
architecture device (an FPGA, for example) would
make more sense [2], however, the actuators in
embedded control systems that are used at
manufacturing as well as interfaces for home
automation applications, these are equipped with
microcontrollers, so we should not reject its
usability and continuity [3]. In this work we make
an approximation of hardware implementation in
artificial hybridization of DNA strands using a
microcontroller, although this type of dispositive
has no advantage in parallel comparison of data
registers, it shows certain good points such as the
In the molecular genetics theory about DNA
hybridization, single strands of DNA from two
different species are allowed to join together to
form hybrid double helices. These hybrid segments
of DNA are used to determine the evolutionary
relatedness of organisms by examining how similar
16
Journal of
o Theoretical an
nd Applied Inforrmation Techno
ology
© 2005 - 2009
9 JATIT. All rights re
eserved.
www.jatit.org
(or disssimilar) the DNA
D
base pair sequences are; in
other words, the degree of hybridization is
proporrtional to the degree
d
of simillarity between the
molecules of DNA from
fr
the two sppecies.
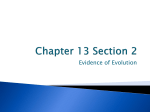
Figurre 2. Model wiith 4 –bits data registers that
repreesent hybridizaation with digittal electronic
e
elements
In thiis scheme the test
t data registeer represents thhe
simple DNA strand with
w a fixed knnown value annd
the basse data registeer is the DNA
A strand that is
injectedd (or is introdduced to seekk hybridizationn).
The baase register should be unique
u
in thhe
architeccture and it cann be comparedd in parallel witth
“n” teest registers. Note that to realize thhe
comparrison both reggisters should have the sam
me
size annd only when they are com
mplementary thhe
only onne output flagg will provide a high logical
value. The bit to bit
b comparison between thhe
registerr will be achieeved through a XOR gate annd
the outpput flag to use a AND gate with
w the number
of entries equal to thee number of XOR
X
gates of thhe
model.
Figure1.. Nucleotides strand
s
3. EXTRAPOLAT
TION
Also known as DNA
D
chip (or DNA
D
microarrray)
it is a matrix structurre where singlee strands of DN
NA
are distributed
d
sim
milarly with the biologiical
beginnning as previo
ously stated, which
w
have beeen
implannted in a siilicon, glass or plastic base
[6][7][[8]. These sim
mple strands havve a known fixxed
value that incubatted (comparee through soome
artificiial or biologicaal method) witth complimenttary
strandds introduced to
o the chip, forrming DNA heelix
shape that can be detected thrrough optical or
electriical methods. The formationn of DNA heelix
shapess from the tw
wo single strannds is known as
hybriddization and the order of the bases of a sim
mple
strandd is denominateed a sequence.. Engineering has
h
demonnstrated that th
he DNA chipss can be usedd to
store and
a evaluate bases
b
of Boolean or fuzzy ruules
in a parallel form
m [9]. In ellectronic desiign,
hybriddization can bee implemented using a referennce
registeer that will be
b compared in parallel with
w
others test registers, looking for evvidence that thhey
are coomplementary.. In figure 2 this conceptt is
shownn.
4. EX
XPERT SYSTE
EM AND PRO
OTOTYPE
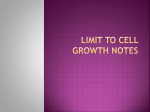
For this particulaar proposal, we
w designed a
prototyppe home autom
mation with a microcontroller
that reaads the valuee resistive (trranslated as an
a
amountt of light) of a LDR
L
sensor (photo resist), annd
based on
o this value is assigned the length of a pulsse
width at
a the device ouutput and servees to position an
a
actuatorr that opens or
o partially clloses a window
blind. The
T design actts as an intellligent system to
t
regulatee the automaticc opening of thhe window blinnd
in correespondence to the natural or
o artificial lighht
intensityy. In figure 3 thhe proposed model
m
is shown.
17
Journal of
o Theoretical an
nd Applied Inforrmation Techno
ology
© 2005 - 2009
9 JATIT. All rights re
eserved.
www.jatit.org
Table 1. Norrmalized entry values
LDR reading
(Deciimal)
N
Normalized
vallue (Binary)
Corresponding
C
entry value
0 a 31.9
32 a 63.9
6
64 a 95.9
9
96 a 127.9
128 a 159.9
160 a 191.9
192 a 223.9
224 a 255
000
001
010
011
100
101
110
111
0
1
2
3
4
5
6
7
To control the output connnected to thhe
servomootor was neceessary to dividde the range of
o
motion in 8 different values. Below
w in Table 2 arre
listed thhe inference rules defined forr this design.
Figure 3.
3 Proposed system
Table 2.. Inference rulees.
Thee expert system
m consists of a base of inferennce
rules that
t
will read the
t resistive vaalue; it will adjjust
the poosition of the seervomotor in a range betweeen 90° annd +90° (or fro
om 0° to 180°). A servomotor is
characcterized by its capacity to poosition itself inn an
immeddiate and exaact form withiin its movem
ment
intervaal when operattional. For this the motor awaaits
a trainn of pulses; eacch pulse has a specific durattion
to moove servomotorr axis to a deetermined anguular
positioon. The servo
omotor used inn this work is a
Futabaa model s3003
3 [10], with a movement rannge
of from 0° to 180°. With 0.30mss the servomootor
will be placed at
a the extrem
me left of its
displaccement and wiith 2.3ms it willl be positionedd at
the extreme right.
If entry = 0 then
t
duty = 0.300 ms
If entry = 1 then
t
duty = 0.599 ms
If entry = 2 then
t
duty = 0.877 ms
If entry = 3 then
t
duty = 1.155 ms
If entry = 4 then
t
duty = 1.42 ms
If entry = 5 then
t
duty = 1.700 ms
If entry = 6 then
t
duty = 2.000 ms
If entry = 7 then
t
duty = 2.30 ms
5. BIO
O-INSPIRED MODEL
The normalize vaalue correspoonding to eacch
reading of the LDR sensor
s
was asssigned to a 3-bbit
base reggister which would
w
be compaared with all teest
registerrs seeking itss exact complement for thhe
hybridizzation as shoown in the simple model in
i
Figure 2. To the test registers thhe fixed valuees
a
registerred in table 3 were assignedd. Note that all
data is stored
s
as compplements (logiccal negation).
t
Thee microcontrolller PIC16F6288 [12] used in this
projecct has the posssibility to reaad resistive data
d
directlly from the LD
DR sensor withhout the necesssity
of addditional circuitss, giving a valuue between 0 and
a
255 (8bits)
(
assigniing the valuee 0 for a laarge
luminoous quantity and a values of 255 for the
absencce of light. Th
he abstraction module raisedd in
Figuree 2 was restrictted to 8 data teest registers, soo it
was decided
d
to norm
malize the inpput values of the
LDR sensor
s
to only
y eight possiblee; similarly, were
w
considdered only 8 po
ossible output values (lengthh of
pulse) for the servom
motor. For datta entry identiffied
a propportionality of 255 / 8 = 31.99, so a read of the
LDR value betweeen 0 and 31.9, it will gett a
resistivve value equall to 0002=0, because they were
w
designned 3-bit dataa registers foor the model of
artificiial hybridizatio
on. For a readding between 224
2
and 255
2
a normaalized value of 1112=7 was
w
assignned. In Table 1 the valuees for the enntry
readinngs are listed.
Table 3.
3 Test registerr.
Test data registeer
RP0
RP1
RP2
RP3
RP4
RP5
RP6
RP7
18
Assignned value
(Biinario)
111
110
101
100
011
010
001
000
Journal of
o Theoretical an
nd Applied Inforrmation Techno
ology
© 2005 - 2009
9 JATIT. All rights re
eserved.
www.jatit.org
In Figure 4, bio-inspired
b
a
architecture
t
that
resolvved the artifficial hybridiization for the
suggessted expert system
s
is shoown. Firstly the
compaarison was reesolved (hybrridization logiical
XOR-AND) between
n the register base
b
and the 8 test
t
registeers labeled ass RP0 and up
u to RP7. This
T
compaarison was no
ot made paraallel due to the
the
sequenntial
action
n
that
prredisposed
microccontroller. As
A
a result of successsful
hybriddization (the base
b
register thhat has found its
uniquee complement)), a single flagg (labeled FLA
AG0
until FLAG7,
F
the saame figure 5) will have a loogic
high to
t enable the correspondingg tri-state regisster
(labeleed PWM7 up as PWM0) that
t
contains the
data pulse width thatt will move thee servomotor (see
Table 2). The micro
ocontroller cann emulate tri-sttate
data registers
r
throu
ugh code, as provided in this
t
designn.
6. EX
XPERIMENTS
S AND RESU
ULTS
The microcontrolller programm
ming was donne
using the
t
high-levell language PIICBASIC PR
RO
[13]. Foocused on the area of home automation annd
program
mming of mobbile devices, we designed a
simple interface throough a serial communicatioon
betweenn the microcoontroller and a Pocket PC
C,
allows you to monitoor the proper performance of
o
the systtem (displacem
ment of the seervomotor). Yoou
can ignnore this interfaace, which doees not affect thhe
automattic operation of the protootype. Figure 5
shows the prototype and reading on a PDA HP
H
h
model, running Windoows Mobile 5.0.
iPAQ hx2490
The disspositive progrramming as well
w as the serial
commuunication was made
m
as shown in [14].
F
Figure
5. Monitoring the functioning.
It is noteworthy thhat the componnent integratioon
was successful and the system worked
w
correctlly
under thhe following teests:
1.
The LDR was
w stimulatedd with differennt
light souurces: a regulaar lamp and nattural light.
2.
The width off pulse (PWM
M) was measureed
by an oscilloscope to verify that the microcontroller
gave thee correct valuee to the servom
motor (see Figurre
6).
3.
The prototyppe worked auttomatically witth
a 9 Volt battery duriing 30 days alllowing a stable
functionning.
Figure 4. Biio-inspired archhitecture.
19
Journal of Theoretical and Applied Information Technology
© 2005 - 2009 JATIT. All rights reserved.
www.jatit.org
[2] D. Vargas, D. Perlaza, A. Delgado. Diseño e
implementación de un robot móvil controlado
con chip ADN en FPGA. XI Taller Iberchip,
Salvador de Bahía - Brasil, Marzo, 2005.
[3] F. Cupertino, E. Mininno, D. Naso. Compact
genetic algorithms for the optimization of
induction motor cascaded control. Electric
Machines & Drives Conference, 2007. IEMDC
'07. IEEE International, Volume: 1, pp. 82-87.
May 2007.
[4] R. R. Sinden. DNA Structure and Function,
Academic Press, 1994.
[5] A. Bray, A. Johnson, J. Lewis, M. Raff.
Essential
Cell
Biology.
Garland
Publishing,1998.
[6] R. Moeller, W. Fritzsche. Chip-based electrical
detection of DNA. Nanobiotechnology, IEE
Proceedings. Volume 152, Issue 1, 4 Feb. 2005
pp. 47 – 51.
[7] H. Simmler, H. Singpiel. Real-time primer
design for DNA chips. Parallel and Distributed
Processing Symposium, 2003. Proceedings.
International, pp. 8-15.
[8] A. Frey, M. Schienle. A Digital CMOS DNA
Chip. Circuits and Systems, 2005. ISCAS
2005. IEEE International Symposium on 23-26
May 2005, Volume 3, pp. 2915 - 2918.
[9] A. Delgado. DNA chips as lookup tables for
rule based systems, IEE Computing and
Control Engineering Journal, Vol. 13, No. 3,
pp. 113-119, 2002.
[10] Hoja de especificaciones del servomotor
Futaba
S3003.
http://www.ett.co.th/product/1602.html.
[11] A. Palacherla. Using PWM to Generate Analog
Output, Application Notes AN538, Microchip
Technology Inc, www.microchip.com.
[12] Microchip Technology Inc. Hoja de
especificaciones
del
microcontrolador
PIC16F628.
http://ww1.microchip.com/downloads/en/Devi
ceDoc/40044F.pdf.
[13] Micro Engineering Labs, Inc. Compilador
PICBASIC
PRO.
http://www.melabs.com/products/pbp.htm.
[14] J. C. Herrera Lozada, I. Rivera Zárate, M.
Olguín Carbajal. Pocket PCs as an Alternative
to Servo Control in Robotics. Polibits,
Research journal on computer science and
computer engineering with applications, Issue
38 (July-December 2008), pp. 75-79.
CIDETEC
IPN,
México,
2008.
http://www.cidetec.ipn.mx/polibits/38_09.pdf.
Figure 6. PWM output of the microcontroller.
7. CONCLUSIONS
In this work a small prototype for the home
automation application at low cost and this can be
easily modified, which can be used for teaching
purposes, was designed. The hybridization of DNA
strands permitted guiding a design towards a
natural parallelization that can easily be explored
through the implementation of embedded systems
with commercial devices, with the intention of
study practical applications using microcontrollers.
The bio-inspired technique, transferred to hardware
design, allowed the correct evaluation of a group of
inference rules which can increase without drastic
changes and can be adapted to other expert systems.
Each one of the tri-state registers used
individually as a result of a successful
hybridization, stored a value that can be updated in
line modifying the scope of the design, in other
words it is possible there exists and optimization
process of the system (e.g. a PDA or a smartphone)
to analyze different behaviors. This work is also
being developed to strengthen this line of
investigation. We should mention that the
automatic system to open and close a window blind
is going to be extended to control the regulation of
a fluorescent lamp and thus assist in saving
electricity.
REFERENCES
[1] A. Delgado. Rule base evaluation using DNA
chips.
Proceedings
American
Control
Conference, pp. 3242 – 3245, Anchorage Alaska, Mayo 8-10, 2002.
20