Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Möbius transformation wikipedia , lookup
Riemannian connection on a surface wikipedia , lookup
Algebraic geometry wikipedia , lookup
Analytic geometry wikipedia , lookup
Anti-de Sitter space wikipedia , lookup
Cartan connection wikipedia , lookup
Euler angles wikipedia , lookup
Trigonometric functions wikipedia , lookup
Duality (projective geometry) wikipedia , lookup
Surface (topology) wikipedia , lookup
Shape of the universe wikipedia , lookup
Four-dimensional space wikipedia , lookup
Regular polytope wikipedia , lookup
Multilateration wikipedia , lookup
Geodesics on an ellipsoid wikipedia , lookup
Dessin d'enfant wikipedia , lookup
Rational trigonometry wikipedia , lookup
Differential geometry of surfaces wikipedia , lookup
Integer triangle wikipedia , lookup
Lie sphere geometry wikipedia , lookup
Pythagorean theorem wikipedia , lookup
History of trigonometry wikipedia , lookup
Geometrization conjecture wikipedia , lookup
List of regular polytopes and compounds wikipedia , lookup
History of geometry wikipedia , lookup
Tessellation wikipedia , lookup
Hyperbolic geometry wikipedia , lookup
Non Euclidean Geometry
Introduction
So far we have looked at what is commonly called Euclidean geometry. There are
occasions where this type of geometry doesn’t get one very far. Suppose we look at this
sphere and want to measure the distance
between the centers of two 5-pointed stars.
You can’t just use a ruler, because you can’t
put the ruler flat on the sphere to measure the
length. If measuring length is already tricky,
how would you find area?
Geometry was initially developed to measure
things: length, area and volume. These things
were used all the way back in ancient Egyptian
and Babylonian times to measure the level of
the Nile, to build temples, to construct the
pyramids, measure how much land you had to
compute taxes, etc.
To make everything work we need lines, line
segments, circles, angles and an understanding
of parallel lines. These five things are the topic of the so called axioms of geometry. Also
called the postulates of geometry.
We have already seen that lines are a bit tricky. What do lines and segments do for us?
The answer is that they measure the shortest distance between two points. Have you ever
seen how builders construct straight lines in the field? The put two stakes in the ground
and pull a piece of string taut between them. So if you wanted to measure the distance
between two points on a sphere you could do the same thing: put two stakes on the sphere
and pull a piece of string taut between them. If you do this you are constructing great
circles on a sphere. Great circles look like the equator or longitudes on the globe. We
sometimes call these great circles geodesics. Technically geodesics are distance
minimizing on the sphere. They play the role of straight lines on the sphere. We will use
these geodesic to create spherical triangles and other spherical polygons.
Here you see a sphere with three geodesics. One is the
equator, and the other two cross the equator and each
other at 90 degree angles. The dotted lines are the
continuation of the great circles (i.e. the geodesics) on
the back side of the sphere.
If you take the intersections point on the left, on the
top, and on the front of the sphere and look at the
geodesic segments that connect them, you will see a
spherical triangle. Spherical triangles can behave in
very strange ways. This is a 90-90-90 equilateral triangle. Such a triangle ONLY exists
on the sphere! There is no way you could draw a 90-90-90 triangle on a piece of paper.
Remember how the sum of the angles of a EUCLIDEAN triangle always has to be 180?
Well, here you see an example of a spherical triangle with angle sum 270.
The most drastic difference between Euclidean and spherical geometry however lies in
the parallel lines. You have all seen parallel lines in Euclidean geometry (any straight
piece of train track is a good example). Remember that two lines are parallel if they never
meet. It is easy to convince yourself though that on the sphere any two great circles will
intersect in two points. This means that one the sphere is not possible to draw parallel
lines. They simply do NOT exist. This causes all kinds of problems for the theory of
polygons. One obvious problem is that parallelograms cannot exist one the sphere. After
all, if there are no parallel lines then you cannot construct a 4 sided polygon with the
property that opposite sides are parallel.
The previous comments show that we have to throw the theory we developed for
Euclidean geometry out the window, and start anew.
You will see though that working your way through the rules and theorems of geometry
a second time is somewhat easier after you have done it once before.
Famous early geometers:
Pythagoras (ca. 540 BC) Showed that in a right triangle the sum of the squares of the
sides equals the square of the hypotenuse.
Plato (ca 380 BC) Laid the basis for formal geometry. His name is associated with the
Platonic solids. Above the entrance to his school of Philosophy (the Academy) was
engraved : “Let no one ignorant of geometry enter my doors”
Aristotle (ca 340 BC) The tutor of Alexander the Great, also trained many of the great
geometers of the time.
Euclid (ca 300 BC) The first to write down the postulates for what is now known as
Euclidean geometry. He was associated with the famous School of Alexandria.
Archimedes (ca 225 BC) Pliny called him “the God of Mathematics”. He was also
associated with the School of Alexandria. His name is now associated with the
Archimedean solids. He was killed during the Siege of Syracuse. He was so immersed in
his math that he supposedly did not notice the city being taken over by the Romans.
Eratosthenes (276-194 BC) Realized that the earth was round, and was able to compute
a fair approximation of its circumference.
Plutarch : “God eternally geometrizes”
The geometry taught in elementary, middle, and high-school is all Euclidean geometry.
As you can see above, many of the results we learn about have been known for over 2000
years.
Mathematicians have investigated properties of spherical triangles for almost 2000 years,
but no systematic theory for geometries other than Euclidean geometry were developed
until the 18th and 19th centuries. Contributors include Lambert, Saccheri, Lobachevsky,
Bolyai, Gauss, and Riemann. At the end of the 19th century it was recognized that there
were different systems of geometry. We will investigate spherical geometry (the
geometry of the sphere) and hyperbolic geometry (as illustrated by Escher’s prints Circle
Limit I-IV).
Spherical Geometry
Resources
In Visions of Symmetry (Schattschneider):
Suggested Reading: Pg. 241-247
Carved Spheres and spherical tessellations, pg 244-247
Shells and Starfish (Verblifa candy tin), pg 295
Lizard/Fish/Bat (carved ivory sphere and related studies), pg 307
Sphere Surface with Fish on Pg 322
In The Magic Mirror of M. C. Escher (Ernst)
Sphere with Angels and Devils on Pg 41
Sphere with Fish on Pg 97
In Magic of M. C. Escher (Escher)
Sphere with Fish on Pg 90-91
Sphere with Angels and Devils on Pg 92
Planetoids, pg 94-97
Solids, pg 98-99
Stars, pg 100
Gravitation, pg 101
Crystal, pg 102
Order & Chaos, pg 103
Waterfall (detail), pg 114
Concentric Rinds, pg 165
Reptiles (detail), pg 175
Sphere spirals, pg 178
Points and Lines
Spherical geometry is nearly as old as Euclidean geometry. In fact, the word geometry
means “measurement of the Earth”, and the Earth is (more or less) a sphere. The ancient
Greek geometers knew the Earth was spherical, and in c235BC Eratosthenes of Cyrene
calculated the Earth’s circumference to within about 15%. Navigation motivated the
study of spherical geometry, because even 2000 years ago the fact that the earth was
curved had a noticeable effect on mapmaking. Even more importantly, the sky can be
(and often was) thought of as a spherical shell enclosing the earth, with sun, moon, and
stars dancing about on its surface. Navigation and timekeeping required a thorough
understanding of how the heavenly bodies moved, and that required spherical geometry.
In geometry there are undefined terms. There are also first principles “the truth of which”
as Aristotle affirmed, “it is not possible to prove”.1 These first principles are called
postulates. In Euclidean geometry we assume that we know what is meant by “point”
1 Pg 280 History of Mathematics Vol. II by D.E.Smith
and “line” – these are undefined terms. To do geometry on a sphere, we need to make
sense of these terms.
In spherical geometry, the “points” are points on the surface of the sphere. We are not
concerned with the “inside” of the sphere. A soap bubble makes a good mental image.
When thinking about the Earth, it’s helpful to realize that if you shrunk the Earth and
dried off the oceans with a towel, the planet would be as smooth as a pool ball, and ones
elevation off the surface would be too small to notice.
Lines in spherical geometry are more subtle. Since the surface is curved, there are no
straight lines on it, in the usual sense of the word straight. Because of this, we use the
word geodesic instead of line when talking about spherical geometry:
Definition
A geodesic in non-Euclidean geometry plays the role that a straight line
plays in Euclidean geometry.
We expect geodesics in spherical geometry to behave like straight lines in Euclidean
geometry. In particular, there are two essential features of a straight line in Euclidean
geometry that we expect geodesics to have:
The shortest distance between two points is a straight line.
A point that moves without turning will follow a straight line.
Definition
A great circle is a circle on a sphere which divides the sphere into two
equal hemispheres. The picture below shows four great circles (all of which wrap
around the “back” side of the sphere.
Great circles on a sphere
A point that moves along the surface of a sphere without otherwise turning will follow a
great circle. The shortest distance between two points on a sphere also lies along a great
circle. Because of this:
Geodesics in spherical geometry are great circles.
We will use these in place of straight lines when doing spherical geometry.
Consider the statement “two points determine a line”. This is a postulate of Euclidean
geometry, which means we accept its truth without proof. In spherical geometry, it is not
quite true. Consider the Earth’s North and South poles. These points are joined by many
great circles, which are known as meridians or lines of longitude. In fact, leaving the
North pole in any direction and heading straight will take you to the South pole along a
geodesic. The North and South pole are not the only points with this property.
Definition
Two points which are opposite each other on the sphere are called
antipodal points.
In spherical geometry, we can say “two points determine a geodesic, unless they are
antipodal points, in which case there are infinitely many geodesics joining them”. This is
less elegant than Euclidean geometry but fairly typical for spherical geometry, where
there are often exceptions for antipodal points.
Definition
A geodesic segment is an arc of a geodesic and its two endpoints.
When saying “two points determine a line”, one usually thinks of the line segment
joining the two points. On a sphere, two points lying on a geodesic create two geodesic
segments since the geodesics are circles. Unless the points are antipodal, there will be a
short segment and a long segment which “goes around the back of the sphere”.
Angle Sum and Area
Definition
A polygon in spherical geometry is a sequence of points and geodesic
segments joining those points. The geodesic segments are called the sides of the
polygon. A triangle in spherical geometry is a polygon with three sides, a
quadrilateral is a polygon with four sides, and so on, as in Euclidean geometry.
One fundamental result of Euclidean geometry is that the sum of the angles in any
triangle is 180°. To see this, we used properties of parallel lines. However, in spherical
geometry there are no parallel lines, because any pair of geodesics intersect at two
(antipodal) points. Instead, in spherical geometry we have:
The sum of the angles in any spherical triangle is more than 180°.
To justify this statement, take a spherical triangle and then draw a flat triangle with the
same vertices, as in the figure. The flat triangle has angle sum 180°, and since the
spherical triangle bulges out from the flat one, its angles must be larger.
Definition
The defect of a spherical triangle is (angle sum of the triangle) - 180°.
The more area a triangle covers, the more it bulges, the more its angles differ from a
Euclidean triangle, and the larger its defect. There is a direct mathematical relationship
between a triangle’s area and its defect. We measure the area as a fraction of the total
area of the sphere:
fraction of sphere’s area covered =
defect
720°
To find the actual area covered by a triangle, you need to know the radius R of the sphere
and then use the fact that the total surface area of a sphere of radius R is 4R2.
Example
The triangle shown in the figure has two 90° angles and one 45° angle. Its
angle sum is 90°+90°+45° = 225°, and its defect is 225° – 180° = 45°. It covers
45/720 = 1/16 of the sphere. Can you see how 16 of these triangles would cover the
whole sphere?
Spherical 90°-90°-45° triangle
We saw in Chapter ? that a Euclidean polygon with n sides has angle sum (n – 2)180°,
by cutting the polygon into n–2 triangles. A spherical polygon with n sides can be cut in
the same way into n–2 spherical triangles, each of which has angle sum more than 180°,
and so the angle sum of a spherical n-gon is more than (n – 2)180°. Put another way,
the angle sum of a spherical polygon always exceeds the angle sum of a Euclidean
polygon with the same number of sides. The amount (in degrees) of excess is called the
defect of the polygon. The fraction of the sphere covered by a polygon is equal to its
defect divided by 720°, just as for triangles.
Spherical Tessellations And Polyhedra
A tessellation of the sphere is a covering of the sphere by tiles, with no overlapping tiles
and no gaps. We focus exclusively on tessellations by tiles which are polygons. As a
first step, we look for regular tessellations.
Recall that a regular polygon is a polygon with all sides the same length and all angles
equal. We keep the same definition in non-Euclidean geometry. In Euclidean geometry,
the angle sum for a polygon with n sides is (n – 2)180°, and this forces the corner angles
(n – 2)180°
of a regular n-gon to be
. This means there is only one shape of Euclidean
n
regular n-gon. In spherical geometry, however, there are many regular n-gons. There is
a regular n-gon with any angle sum larger than (n – 2)180° (up to a maximum size). So,
(n – 2)180°
there is a regular n-gon with any choice of corner angle larger than
(again,
n
up to some maximum size). The maximum sizes aren’t as important, and are left for the
exercises.
This table summarizes the corner angles of some regular polygons on the sphere:
name
# of sides corner angle
biangle
2
>0°
triangle
3
>60°
quadrilateral
4
>90°
pentagon
5
>108°
hexagon
6
>120°
heptagon
7
>128.57...°
octagon
8
>135°
To make a regular tessellation of the sphere, we need to pick one regular polygon and use
it to cover the sphere. As with regular tessellations of the plane, the difficulty is to fit
corner angles around a vertex – it requires the corner angle to divide evenly into 360°.
This means that the possibilities for corner angles are 360/2 = 180°, 360/3 = 120°, 360/4
= 90°, 360/5 = 72°, 360/6 = 60°, and so on.
Two strange “degenerate” types of regular tessellations show up in spherical geometry.
The first is by polygons with corner angles equal to 180°. A 180° corner doesn’t look
like a corner at all, and a regular n-gon with 180° corner angles simply looks like a
hemisphere with n evenly spaced dots on its edge for the “vertices”. Two of these fit
together to cover the sphere. One can argue about whether this should be a polygon at
all, but we’ll see that it fits very nicely in a larger picture of regular tessellations and is
worth including.
The other degenerate tessellation is a “beach ball” made with k biangles which have
360°/k corner angles. The beach ball with k = ? is shown below, and there is one for any
choice of k > 1.
Tessellation by 7 biangles.
Two 12-gons with 180° “corner” angles
If you want to make non-degenerate spherical tessellations (using regular polygons with
more than two sides, and which have corner angles that actually bend) there are only a
few options. First, the corner angles must be 120° or less to divide evenly into 360°.
This limits the choices of polygon to triangle, quadrilateral, and pentagon, and in fact
leaves only five possibilities:
triangles with 72° angles, five meeting at a vertex
triangles with 90° angles, four meeting at a vertex
triangles with 120° angles, three meeting at a vertex
quadrilaterals with 120° angles, three meeting at a vertex
pentagons with 120° angles, three meeting at a vertex
When making tessellations of the Euclidean plane, it was not so surprising that once we
had six 60°-60°-60° triangles around one vertex we were able to fill out the rest of the
plane. With spherical geometry, we can fit five 72°-72°-72° triangles around a vertex,
but as we fill up the sphere with triangles we have to hope that they come together on the
back and actually close up. Amazingly, in all five cases listed above, the polygons do
cover the sphere and we get a regular tessellation. Here’s what they look like:
The five non-degenerate regular tessellations have been known for thousands of years,
although in their alter-egos as polyhedra. A polyhedron is a three dimensional solid with
a surface made of polygons, known as the faces of the polyhedron. Using the same
vertices as the spherical tessellations but replacing the spherical polygons with flat
polygons (that lie inside of the sphere), you get five polyhedra known as the Platonic
solids:
The Platonic Solids
Tetrahedron
Cube
Octahedron
Dodecahedron
Icosahedron
Plato did not discover these solids, but in the dialogue Timaeus he discusses the
construction of the universe and (at some length) associates the cube, tetrahedron,
octahedron and icosahedron with the elemental ideas of earth, fire, air and water. The
dodecahedron, he claims, “God used in the delineation of the universe”.
The attachment of mystical or spiritual properties to the platonic solids is, in some sense,
a tribute to their mathematical perfection, and continues to this day. The 17th century
astronomer Johannes Kepler wrote extensively about them, and attempted (more or less
unsuccessfully) to explain the orbits of the planets as coming from the radii of a nested
set of platonic solids. His reasoning was that God must have created the universe
according to the platonic solids because of their mathematical perfection. In Kepler’s
time, this was a somewhat heretical stance since it suggested that God was bound by rules
of mathematics discovered by science.
Euler Characteristic
In 1750, the Swiss mathematician Leonhard Euler discovered a remarkable formula
involving the number of faces f, edges e, and vertices v of a polyhedron:
v–e+f=2
As a first step to understanding this equation, we will calculate v, e, and f for the Platonic
solids and check that v – e + f = 2.
We can count the faces of each Platonic solid by considering the corresponding spherical
tessellation. For example, in the tessellation corresponding to the dodecahedron there are
three pentagons at each vertex, so that each pentagon has 120° corner angles. The five
angles give an angle sum of 5*120° = 600°. Since a Euclidean pentagon has angle sum
540°, these spherical pentagons have defect equal to 600°-540° = 60°. Each pentagon
therefore covers 60°/720° = 1/12 of the sphere, and so there are 12 faces on the
dodecahedron.
In the spherical tessellation corresponding to the octahedron, four triangles meet at a
vertex. Therefore these are 90°-90°-90° triangles, which have defect 270°-180° = 90°.
Each one covers 90°/720° = 1/8 of the sphere, so there are 8 faces on the octahedron.
To count the edges of the dodecahedron, notice that each of the 12 faces has 5 edges.
12*5
Since each edge is shared by two faces, there are 2 = 30 edges on the dodecahedron.
Another way to understand this calculation is to imagine each edge cut into a left and
right half. Then each face contributes 5 half-edges, and 12 * 5 *1/2 = 30.
As another example, let’s count the edges of the octahedron (which you can probably do
8*3
by inspection). There are eight triangles, each with three edges, so there are 2 = 12
edges in the octahedron.
We’ll count the vertices in a similar manner. For the dodecahedron, each of the 12 faces
12*5
has 5 vertices. Since each vertex is shared by three faces, there are 3 = 20 edges on
the dodecahedron. Another way to understand this calculation is to imagine each vertex
cut into three 120° wedges. Then one corner of one face is 1/3 of a vertex, and 12*5*1/3
= 20.
For the octahedron, there are 8 faces with 3 vertices each, and each vertex is shared by 4
8*3
faces. There are 4 = 6 vertices.
Similar calculations establish the number of faces, edges, and vertices on the tetrahedron,
cube, and icosahedron. It is also possibly to simply count by inspection. We arrive at the
following table:
Polyhedron
# of vertices (v)
# of edges (e)
#of faces (f)
v–e+f
Tetrahedron
4
6
4
2
Cube
8
12
6
2
Octahedron
6
12
8
2
Dodecahedron
20
30
12
2
Icosahedron
12
30
20
2
We calculate one more example, the “tetrakis hexahedron”, which is the basis for
Escher’s Sphere with Angels and Devils (Magic #151). Each face is a triangle, but this is
not a regular tessellation of the sphere since these are not equilateral triangles. In the
corresponding spherical tessellation, two of the triangle’s corners are 60° angles, since six
of them together at those points. The other corner is 90° since four triangles come
together at that point. The defect is 60°+60°+90° - 180° = 30°. The area fraction is
30°/720° = 1/24, so 24 of these triangles cover the sphere. Since the tetrakis hexahedron
has 24 faces and each face has 3 edges, it has 24*3/2 = 36 edges.
Tetrakis Hexahedron
Corresponding tessellation of the sphere
The easiest way to count the vertices of the tetrakis hexahedron is to use v – e + f = 2.
Since f = 24 and e = 36, v must be 14. As a check, we count another way. Each triangle
contributes 1/4 of one vertex, and 1/6 each of two others. Since there are 24 triangles, the
total number of vertices v = 24*(1/4 + 1/6 + 1/6) = 14.
Having seen some evidence that v – e + f is 2, we try to make a convincing argument that
it is always 2 for spherical tessellations. We write the Greek letter chi as a shorthand, =
v – e + f.
The plan is to start with a sphere with one dot on it. Since there is one face (the sphere)
and one vertex (the dot), = v – e + f = 1 – 0 + 1 = 2 in this case. Now we build
whatever tessellation we desire by using one of the following two moves:
Move I:
Add a new dot and an edge connecting it to an existing dot.
Move II: Add an edge connecting two (different) existing dots.
The key point is that neither Move I or Move II changes . Move I adds one vertex and
one edge, which cancel in v – e + f. Move II adds one new edge, and cuts one face into
two, creating a net increase of one face. Again, e increasing by 1 and f increasing by 1
cancel in v – e + f.
To make this argument into a rigorous mathematical proof, we would need to argue that
any spherical tessellation can be built from the one-dot-sphere via a series of Moves I and
II. While not a difficult argument, it is too technical for this discussion. However, it is
not hard to draw specific tessellations by hand in this way.
The quantity = v – e + f is called the Euler characteristic. It is always 2 for spherical
tessellations (and for polyhedra), but can actually be different from 2 on other surfaces.
For example, a careful count of v, e, and f on a donut made of polygons shows that its
Euler characteristic is 0.
The Euler characteristic of this donut is 0
The number can detect the shape of a surface without noticing size or other
deformations such as stretching (e.g. a sphere stretched into a football shape). Because of
this, it is considered part of a branch of mathematics called topology.
Duality
Every tessellation by polygons has a dual. The duality process works in Euclidean
geometry, non-Euclidean geometry, and even with polyhedra. We start with Euclidean
geometry first, to get the idea.
To find the dual to a tessellation, start with a tessellation by polygons, and put a point
inside each polygon of the tessellation. Connect these new points by line segments,
connecting two points when their enclosing polygons share an edge. The dual
tessellation is made up of these points and the edges connecting them.
Original tess.
Dual points
Connect neighbors
Dual tess.
Sometimes the line joining two new points will have to cross through other tiles of the
tessellation, but that’s fine. Another question is what to do near the edges of a
tessellation, and as you can see in the example we left some polygons open to avoid this.
For tessellations that cover the entire plane, and for spherical tessellations, this isn’t an
issue so we won’t worry about it.
In this process, we got one new vertex for every tile of the original tessellation. We also
got one edge in our dual for every edge in the original, since two points got connected by
an edge if they had an edge in common. Finally, we got one new tile in the dual for each
vertex of the original. This is because the edges leaving an original vertex get turned into
edges of a polygon that surrounds the original vertex.
Repeating the dual returns to the original tessellation, which means that neither one is
particularly more original than the other, so we just say that two tessellations are dual.
For example, the tessellation by equilateral triangles and the tessellation by regular
hexagons are dual:
Duality works for spherical tessellations and for polyhedra. With polyhedra, the process
forms the dual polyhedron inside the original, but altering the sizes can lead to pleasing
“compound” solids. As an example, the octahedron and cube are dual.
Octahedron inside cube
Cube-octahedron
compound
Cube inside octahedron
The cube-octahedron compound is visible in the upper left corner of Escher’s Stars.
Symmetries in Spherical Geometry
Spherical rotations involve spinning the sphere around an axis line that goes through the
center of the sphere. A spherical rotation has two points that don’t move, where the
rotation axis hits the sphere at a pair of antipodal points. For example, the Earth
(idealized a bit) rotates on its axis, and the North and South poles don’t move.
Translations on the sphere are exactly the same as rotations. A translation should slide
along a geodesic. The geodesics are great circles, and if you slide along a great circle the
sphere rotates around an axis. Picture the Earth’s equator, and as the world turns it
appears that points near the equator are being translated east.
Translation along a great circle is the same as rotation
around the corresponding pole.
You can reflect a sphere using a geodesic as your reflection line. The reflection
exchanges the two hemispheres. Like Euclidean geometry, the combination of a
reflection and a translation is a new kind of symmetry, and could be called a glide
reflection or a rotation-reflection.
Exercises
1. Does every point on a sphere have an antipodal point? How many antipodal points
does any given point on the sphere have?
2. Why was Escher unhappy with tessellations of the plane as a means to display
infinity? Look at Escher’s spherical tessellations on pg. 91,92 of Magic and on pg.
244-245 of Schatt. Do you think these give a good sense of infinity? Why or why
not?
3. What might “between” mean for points on a sphere? Write a definition you are
happy with. With your definition, is St. Louis between the North Pole and the South
Pole? Is the North Pole between the South Pole and St. Louis?
4. Draw a picture of sphere. Draw a triangle on it with three 90° angles.
5. Same as (1), but draw a triangle with one angle larger than 180°.
6. Draw three straight lines on a sphere so each one is perpendicular to the others.
7. Fill in the empty (lettered) places in this table:
Angles
Defect
90°
90°
90°
a:
120°
80°
70°
c:
72°
72°
72°
e:
90°
45°
g:
45°
135°
135°
i:
j:
Area Fraction
b:
d:
f:
h:
8. What is the largest defect a triangle can achieve on the sphere?
Hint 1: a really "big" triangle looks like the outside of a small triangle.
Hint 2: What fraction of the sphere could it cover?
9. What is the largest defect a spherical polygon with n sides can achieve?
1/4
10. What is the upper limit for the corner angle of an equilateral spherical triangle?
11. What is the upper limit for the corner angle of a spherical regular polygon with n
sides?
12. Use your knowledge of spherical triangles to explain why the sum of the angles of a
quadrilateral on a sphere is always larger than 360°.
13. The state of Colorado has four 90° corners. However, we know that no spherical
rectangle can have four right angles. What is going on with Colorado?
14. A "biangle" is a polygon with two sides and two angles. They don’t exist in
Euclidean geometry, but they do on the sphere. Draw some biangles. (Hint: put one
of the corners at the north pole).
15. Find a formula relating the angles of a biangle to the fraction of the sphere covered by
the biangle.
16. Hiram of Tyre helped build King Solomon’s temple. From 1 Kings 7.23:
Then he made the molten sea; it was round, ten cubits from brim to brim, and five cubits
high. A line of thirty cubits would encircle it completely.
This presumably describes a sort of circular above-ground pool, with a diameter of
ten cubits and circumference of thirty cubits.
a. Discuss the plausibility of these measurements.
b. Explain how the pool could be built exactly as specified on the surface of a
sphere.
*c. On what diameter sphere (i.e. on what size of planet) could this pool be built
precisely? (Mathematics Magazine, Vol 76 #3, June 2003)
17. Does every tessellation of the sphere by polygons give a corresponding polyhedron?
18. Build yourself a set of five platonic solids using “nets”. Nets are flat cutouts that can
be folded and glued into polyhedra, and are readily available for the Platonic solids.
19. In Double Planetoid (Magic pg. 94) what shape are the two parts of the planet? (And
by the way, check out Escher’s comment about this picture on page 97).
20. In Stars (Magic pg 100), the main structure is built out of three intersecting platonic
solids. What are they?
21. In Gravitation (Magic pg 101), how many lizards are there, counting ones which
would be hidden on the back? Hint: Pay close attention to the colors. Hint: This
shape is called a stellated dodecahedron.
22. How many seashells are on Escher’s Verblifa candy tin (Schatt. pg 295)?
23. Draw the tessellation of the plane by hexagons (three hexagons meet at each vertex).
Its dual is the tessellation by equilateral triangles (six at a vertex). Draw pictures to
illustrate this.
24. What is the dual of the regular tessellation of the plane by squares?
25. What is the dual of the tetrahedron?
What is the dual of the cube?
What is the dual of the octahedron?
What is the dual of the dodecahedron?
What is the dual of the icosahedron?
26. Johannes Kepler (1571-1630) writes in The Harmonies Of The World (Book V):
However, there are, as it were, two noteworthy weddings of these figures, made from
different classes: the males, the cubes and the dodecahedron, among the primary; the
females, the octahedron and the icosahedron, among the secondary, to which is added
one, as it were, bachelor or hermaphrodite, the tetrahedron, because it is inscribed in
itself, just as those female solids are inscribed in the males and are, as it were, subject to
them, and have the signs of the feminine sex, opposite the masculine, namely, angles
opposite planes.
What is Kepler saying? What do you think of it?
27. A tetrahedron has six edges. Sketch a picture of a tetrahedron, and color the edges
with three colors so no two edges with the same color touch each other.
28. Use the defect and area fraction to check that an icosahedron has 20 faces.
29. Check out the rhombic dodecahedron and the spherical tessellation shown on the
bottom of page 246 (Schatt), as well as on page 307 (Schatt). This is not a platonic
solid, or a regular tessellation of the sphere. Why not?
30. By looking at the sphere on page 246 (Schatt), determine the corner angles of the
rhombus on the sphere. Remember, you can do this by deciding how many fit
together to make 360° at a vertex.
31. What is the defect of the rhombus from the previous problem? (Remember, defect
for a 4 sided shape is the amount over 360°) What fraction of the sphere does it
cover?
32. Count the number of vertices, number of faces, and number of edges in the rhombic
dodecahedron. The Euler characteristic should still be 2.. is that what you got?
33. Look at Escher’s Concentric Rinds on pg. 165 of Magic, and focus on the outer
sphere. It’s tessellated by many copies of one triangle.
a. What are the corner angles of this triangle?
b. What is it’s defect?
c. How many copies of the triangle cover the sphere?
d. How many vertices, edges, and faces does this tessellation have?
34. The “pentakis dodecahedron” is a spherical tessellation by 60°-60°-72° triangles.
a. How many vertices, edges, and faces does this tessellation have?
b. The dual of the pentakis dodecahedron is a well known spherical tessellation.
Where have you seen it before?
35. Look at Escher’s Möbius Strip II (Red Ants) on Magic pg. 186. Assume the strip is a
flat surface with a tessellation by squares. How many vertices, edges, and faces
(squares) does it have? What is the Euler characteristic of the strip?
36. How many vertices, edges, and faces does the donut shown in the Euler Characteristic
section have? What is its Euler characteristic?
Hyperbolic Geometry
A first look
We have seen two different geometries so far: Euclidean and spherical geometry. The
idea is that geometry is meant to describe the world around us, and the geometry then
depends on some fundamental properties of the world we are describing. Objects that live
in a flat world are described by Euclidean (or flat) geometry, while objects that live on a
spherical world will need to be described by spherical geometry.
The obvious question at this point should be if there are any other geometries out there.
In two dimensions there is a third geometry. This geometry is called hyperbolic
geometry. We just reminded ourselves that Euclidean geometry describes objects in a flat
world or a plane, and spherical geometry describes objects on the sphere. So, what world
does hyperbolic geometry describe? It is a fact that we can think of this hyperbolic world
in several different ways, but if we use Escher’s work as a reference we should think of
hyperbolic space as the distorted interior of a disk.
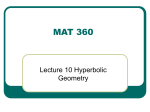
Think of all the fish as living inside this
hyperbolic world. They all live in the interior
of the disk, and it is a distorted picture
because, believe it or not, all these fish are the
same size.
Have you ever noticed how a stick looks bent
if you partially submerge it in water? The
same happens to a straw in a glass of water.
Something like that happened here too. Notice
the white curves that look like they are bent?
That is the effect of hyperbolic space. These
are actually straight. These curves are the
geodesics of hyperbolic space. They measure
shortest distance, and segments of them can be used to make polygons. Do you see the 4
sided polygon in the center? Do you notice other 4 sided polygons closed to the edge of
our hyperbolic space? Notice that all the sides of these 4-gons are exactly the length of
one fish. This means that all the 4-gons have exactly the same shape and size! This gives
you an idea I hope of what I meant when I said that hyperbolic space could be thought of
as the distorted interior of a disk.
Resources
In Visions of Symmetry (Schattschneider):
Suggested Reading: Pg. 251
Circle Limit I on Pg 316
Circle Limit III on Pg 251
Circle Limit IV on Pg 296
In The Magic Mirror of M.C.Escher (Ernst)
Suggested Reading: The Coxeter Prints, Pg 108-109
Circle Limit I on Pg 21 and Pg 108
Circle Limit III on Pg 109
Circle Limit IV on Pg 41
Coxeter Illustration on Pg 108
In The Magic of M.C.Escher (Escher)
Circle Limit I, II, III and IV on Pg 180-190
Suggested Reading: H.S.M Coxeter, The Non-Euclidean Symmetry of Escher’s Picture
‘Circle Limit III’, in Leonardo, Vol. 12 (1979).
Introduction
In about 300BC, Euclid penned the Elements, the basic treatise on geometry for almost
two thousand years. He clearly states his assumptions in five “postulates”. Euclid’s fifth
postulate concerns parallel lines, and in a more modern form says that “given a line L,
and a point P not on that line, there is exactly one line through P which is parallel to L”.
This fifth postulate, the “parallel postulate” seemed more complicated and less obvious
than the other four, so for many hundreds of years mathematicians attempted to prove it
using only the first four postulates as assumptions.
We saw that the parallel postulate is false for spherical geometry (since there are no
parallel geodesics), but this is not helpful since some of the first four are false, too. For
example there are many geodesics through a pair of antipodal points. In fact, the first
four postulates imply that given a line and a point not on that line, there is a parallel line
as required. The subtle question is: can there be more than one?
In 1733, the Jesuit priest Giovanni Saccheri began by assuming the fifth postulate was
false, and attempted (at great length) to derive a statement contradicting the other four.
In doing so, he nearly produced the theory of hyperbolic geometry. However, his goal
was not to discover new kinds of geometry, but to rule them out, so he concluded his
treatise with a rant about the absurdity of everything he had just written.
The great German mathematician Carl Freidrich Gauss apparently believed that a
geometry did exist which satisfied Euclid’s first four postulates but not the fifth.
However, Gauss never published or discussed this work because he felt his reputation
would suffer if he admitted he believed in non-Euclidean geometry. In the early 1800’s,
the idea was preposterous.
Generally, Nikolai Ivanovich Lobachevsky is credited with the discovery of the nonEuclidean geometry now known as hyperbolic space. He presented his work in the
1820’s, but even it was not formally published until the 20th century, when Felix Klein
and Henri Poincaré put the subject on firm footing.
Models of Hyperbolic Space
The non-Euclidean geometry which satisfies Euclid’s first four postulates but not the
parallel postulate is called hyperbolic geometry. Like spherical geometry, which takes
place on a sphere, hyperbolic geometry takes place on a curved two dimensional surface
called hyperbolic space. On a sphere, a small neighborhood of a point looks like a cap.
In hyperbolic space, every point looks like a saddle. Unfortunately, while you can piece
caps together to make a sphere, piecing saddles together quickly runs out of space.
A bit of sphere
A bit of hyperbolic space
To get the flavor of hyperbolic space, make some hyperbolic paper. You could make
Euclidean space by gluing equilateral triangles together so that six touch at each vertex
(this is just the usual tessellation by triangles). You can make an icosahedron by gluing
equilateral triangles together so that five touch at each vertex, which corresponds to a
tessellation of the sphere and makes a pretty good model for an actual curved sphere.
Gluing four, three, or two triangles also makes a sphere, of sorts. To make a model of
hyperbolic space, cut out equilateral triangles and paste together so that seven come
together at one point. This will be a floppy, saddle like object. Now continue gluing on
triangles so that each vertex has seven of them. Probably you will run out of patience
before you run out of room, but eventually you’ll need to put too many triangles in too
small a space to continue.
Because globes are unwieldy, navigators use flat maps of the spherical earth. Maps of
the Earth are necessarily distorted, for example Greenland appears extremely large on the
standard Mercator map of the Earth.
Because models of hyperbolic space are unwieldy (not to mention infinite), we will do all
of our work with a map of hyperbolic space called the Poincaré disk. The Poincaré disk
is the inside of a circle (although the circle is not included) and is badly distorted near its
edge.
Objects near the edge of the Poincaré disk are larger than they appear.
Hyperbolic man takes a walk
The picture shows a stick man as he walks towards the edge of the disk. He appears to
shrink, as does the distance he moves with each step. But this disk is a distorted map,
and in the actual hyperbolic space his steps are all the same length and he stays the same
size. The man will never reach the edge of the disk, because it is infinitely far away. The
edge is drawn dashed because it is not actually part of hyperbolic space.
The geodesics in hyperbolic space play the role of straight lines. Geodesics appear
straight to an inhabitant of hyperbolic space, and they are the shortest paths between
points. In the Poincaré disk model, geodesics appear curved. They are arcs of circles.
Specifically:
Geodesics are arcs of circles which meet the edge of the disk at 90°.
Geodesics which pass through the center of the disk appear straight.
Geodesics in hyperbolic space
You can see that geodesics bend towards the center of the disk. The quickest way get
from one place in hyperbolic space to another is to detour towards the center, because a
step in the center is longer than a step near the edge. These geodesics are shortest paths.
Hyperbolic man chooses to walk closer to the center
Polygons and Defect
Definition
A polygon in hyperbolic geometry is a sequence of points and geodesic
segments joining those points. The geodesic segments are called the sides of the
polygon. A triangle in hyperbolic geometry is a polygon with three sides, a
quadrilateral is a polygon with four sides, and so on, as in Euclidean geometry.
Here are some triangles in hyperbolic space:
From these pictures, you can see that:
The sum of the angles in any hyperbolic triangle is less than 180°.
Definition
The defect of a hyperbolic triangle is 180° – (angle sum of the triangle).
By cutting other polygons into triangles, we see that a hyperbolic polygon has angle sum
less than that of the corresponding Euclidean polygon. Define the defect for a hyperbolic
polygon with n sides to be (n – 2)180° – (angle sum of the polygon). Putting this
together with the defect in spherical geometry:
The defect of a polygon is the difference between it’s angle sum and the
angle sum for a Euclidean polygon with the same number of sides.
This statement works in spherical and hyperbolic geometry, for polygons with any
number of sides. It even works for biangles, because a biangle in Euclidean geometry
must have two 0° angles.
The area of a hyperbolic polygon is still proportional to its defect:
Area of a hyperbolic polygon = 180° defect
The proof of this equality is usually referred to as the Gauss-Bonnet theorem.
In spherical geometry, we had a formula for the fraction of the sphere covered. If the
defect
sphere has radius 1, the total area is 4, and so the area of a polygon is 4 720° which
(after a little simplification) is exactly the same formula as in hyperbolic space!
In an extreme case, we can draw three geodesics that touch at the boundary of the disk.
The boundary isn’t part of hyperbolic space, so these lines never actually meet, they just
get closer and closer to meeting. Although this isn’t a triangle (because it has no
vertices), we call such a figure an ideal triangle. You can create other ideal polygons in
a similar manner:
Ideal triangles
An ideal hexagon
The area formula implies that any ideal triangle has area , because the angle sum is zero
and its defect is 180°. Both ideal triangles shown above have the same area even though
the distortion of the Poincaré disk makes one look much smaller than the other. The ideal
hexagon shown has angle sum zero, so it’s defect is 720° and its area is 4.
Hyperbolic Tessellations
A tessellation of hyperbolic space is a covering of the sphere by tiles, with no
overlapping tiles and no gaps. Escher’s Circle Limit series are examples of hyperbolic
tessellations. Like his other tessellations, Escher began with a geometric tessellation by
polygons and worked from there.
In hyperbolic space, there are infinitely many regular tessellations, which is in sharp
contrast to Euclidean space, which has only three, and to spherical geometry, where there
are only five non-degenerate possibilities. Hyperbolic space is easy to tessellate because
the corner angles of polygons want to be small, and small angles fit nicely around a
vertex.
Here are a few regular tessellations of hyperbolic space:
Seven triangles at a vertex
Four pentagons at a vertex
Six hexagons at a vertex
In the first, the triangles have 360°/7 51.4° angles and angle sums of approximately
351.4°=154.3°. This gives a defect of approximately 180–154.3° = 25.7° and an area of
approximately 0.45. In the second tessellation, the pentagons have five 90° angles each,
so their angle sums are 450° giving a defect of 540°-450° = 90° and an area of
approximately 1.57. The third tessellation is left as an exercise.
Escher’s Circle Limit I is based on a tessellation by quadrilaterals with angles 90°-60°90°-60° (which is not regular). You can see the underlying grid by focusing on the spines
of the fish:
Circle Limit I
Circle Limit III
His Circle Limit III is more subtle. Looking at the white spines of the fish, it appears to
be a tessellation of hyperbolic space by triangles and squares, with three triangles and
three squares coming together at each vertex. This would mean that the corner angles of
both polygons are 60° each, but this gives the triangle an angle sum of 180°, which
cannot happen in hyperbolic space!
And yet, Circle Limit III clearly has the flavor of a hyperbolic tessellation. H.S.M
Coxeter, a mathematician and friend of Escher’s analyzed the print, and discovered that
the white circular arcs along the spines meet the boundary of the disk at 80° each, rather
than the 90° required to be geodesic. Since the white lines are not geodesics, neither the
“triangle” or the “square” is really a polygon at all! Even Escher does not seem to have
realized this, although most probably he would not have cared, as he was very satisfied
with the print and the suggestion of infinity it presents.
Ideal tessellations are tessellations by ideal polygons. Because ideal polygons have 0°
angles, infinitely many come together at each vertex (but keep in mind that ideal
polygons aren’t really polygons and don’t actually have vertices). Here are a couple of
ideal tessellations of hyperbolic space:
<Find pictures of ideal triangle tessl, other ideal tess>
Regular Tessellations in Three Geometries
A regular tessellation is described completely by a pair of numbers - the number of sides
on each tile, and the number of tiles meeting at a vertex. The “Schlafli symbol” for a
regular tessellation is just this pair of numbers, written {n,k}. For example, the regular
tessellation of the plane by hexagons is written {6,3}, since three hexagons meet at each
vertex.
There is a regular tessellation for every Schlafli symbol {n,k} (with n and k at least 2).
Some are spherical, some are Euclidean, and some are hyperbolic. To classify which
{n,k} go with which geometry, we consider angle sums.
If we want k copies of an n sided polygon to meet at a vertex, that polygon has corner
angles 360°/k and so has angle sum n(360°/k). On the other hand, a Euclidean polygon
with n sides has angle sum (n–2)180°. The {n,k} regular tessellation will be spherical,
Euclidean, or hyperbolic depending on the relationship between n(360°/k) and (n–
2)180°. A hyperbolic polygon will have smaller angle sum than its Euclidean
counterpart, and so {n,k} is hyperbolic when n(360°/k) < (n–2)180°, which simplifies
1 n–2
1 1 1
to k < 2n and further to k + n < 2. Repeating the same computation with > for spherical
and = for Euclidean gives:
1 1 1
{n,k} is hyperbolic if k + n <
2
1 1 1
{n,k} is Euclidean if k + n =
2
1 1 1
{n,k} is spherical if k + n >
2
We can make a table summarizing our discoveries for regular tessellations. There is a
box for each Schlafli symbol {n,k}, and in the box there is an S for spherical, E for
Euclidean, or H for hyperbolic. The table continues off to infinity, with the first column
and first row staying spherical (the two-hemisphere and beach ball tessellations) and
everything else hyperbolic.
k
2
3
4
5
6
7
8
n
2
S
S
S
S
S
S
S
3
4
S
S
S
S
S
(tetrahedron)
(octahedron)
(icosahedron)
E
H
H
S
E
H
H
H
H
H
H
H
H
H
(cube)
5
S
S
(dodecahedron)
6
S
E
H
H
H
H
H
7
S
H
H
H
H
H
H
8
S
H
H
H
H
H
H
The table itself has symmetry, a reflection along the diagonal line from upper left to
lower right. The reflection matches up pairs of boxes which correspond to dual
tessellations. For example, it reflects the icosahedron to the dodecahedron and these are
dual Platonic solids. Boxes on the diagonal reflect to themselves, and they are self-dual.
For example, the {4,4} Euclidean tessellation is the tessellation by squares, and the dual
of the square tessellation is the square tessellation again.
Another look at the Role of Axioms in Geometry
The five axioms for Euclidean geometry are:
1. Any two points can be joined by a straight line.
2. Any straight line segment can be extended indefinitely in a straight line.
3. Given any straight line segment, a circle can be drawn having the segment as radius
and one endpoint as center.
4. All right angles are congruent.
5. Through a point not on a given straight line, one and only one line can be drawn that
never meets the given line.
The fifth postulate is called the parallel postulate, which leads to the same geometry as
either one of the following statements:
If two lines are drawn which intersect a third in such a way that the sum of the
inner angles on one side is less than two right angles, then the two lines inevitably
must intersect each other on that side if extended far enough.
The sum of the angles in a triangle is exactly 180 degrees.
The axioms are basic statements about lines, line segments, circles, angles and parallel
lines. We need these statements to determine the nature of our geometry.
In our two other geometries, spherical geometry and hyperbolic geometry, we keep the
first four axioms and the fifth axiom is the one that changes. It should be noted that even
though we keep our statements of the first four axioms, their interpretation might change!
The five axioms for spherical geometry are:
1. Any two points can be joined by a straight line.
2. Any straight line segment can be extended indefinitely in a straight line.
3. Given any straight line segment, a circle can be drawn having the segment as radius
and one endpoint as center.
4. All right angles are congruent.
5. There are NO parallel lines.
How do we interpret the first four axioms on the sphere?
Lines: What would a “line” be on the sphere? In Euclidean geometry a line segment
measures the shortest distance between two points. This is the characteristic we want to
carry over to spherical geometry. The shortest distance between two points on a sphere
always lies on a great circle. Longitude lines and the equator on a globe are examples of
great circles. Note that we can always draw a great circle, which we will from now on
call a geodesic, through any two points.
We have to be careful here, because unlike in Euclidean geometry this geodesic (“line”)
may not be unique. Take for instance the north and South Pole on the globe. There are
infinitely many great circles through these two poles. In general, any two points that lie
on opposite sides of the sphere, so called antipodal points, can be joined by infinitely
many geodesics.
Line segments: We can extend any line segment, but at some point the line segment will
then connect up with itself. A line of infinite length would go around the sphere an
infinite amount of times.
Circles: As we have stated the circle axiom it is true on the sphere. Note that it does not
make sense to say that given any center C and any radius R we can draw a circle of radius
R centered at C. If we take a radius less than half the circumference of the sphere, then
we can draw the circle. If the radius is exactly half the circumference of the sphere, then
the circle degenerates into a point. If the radius were greater than half the circumference
of the sphere, then we would repeat one of the circles described before.
Note that great circles are both geodesics (“lines”) and circles.
Angles: Right angles are congruent. Think about the intersection of the equator with any
longitude. These two geodesics will meet at a right angle.
No parallel lines: Any two geodesics will intersect in exactly two points. Note that the
two intersection points will always be antipodal points.
Sum of the angles in a triangle: On the sphere the sum of the angles in a triangle is
always strictly greater than 180 degrees.
These basic facts really turn the properties of this geometry on its head. We will have to
rethink all of our theorems and facts! Here are some examples of the difference between
Euclidean and spherical geometry.
In Euclidean geometry an equilateral triangle must be a 60-60-60 triangle. In spherical
geometry you can create equilateral triangles with many different angle measures. Take
for instance two longitudes that meet at 90 and intersect them with the equator. This gives
ride to a 90-90-90 equilateral triangle! If you shrink this triangle just a little bit, you can
make an 80-80-80 triangle. If you expand it a bit, you can make a 100-100-100 triangle.
As a matter of fact you can make a X-X-X triangle as long as 60 < X < 300.
Note that not having any parallel lines means that parallelograms do not exist. Recall that
a parallelogram is a 4-gon that has the property that opposite sides are parallel. In
Euclidean geometry this definition is equivalent to the definition that states that a
parallelogram is a 4-gon where opposite angles are equal. In spherical geometry these
two definitions are not equivalent. There are quadrilaterals of the second type on the
sphere.
The five axioms for hyperbolic geometry are:
1. Any two points can be joined by a straight line.
2. Any straight line segment can be extended indefinitely in a straight line.
3. Given any straight line segment, a circle can be drawn having the segment as radius
and one endpoint as center.
4. All right angles are congruent.
5. Through a point not on a given straight line, infinitely many lines can be drawn that
never meet the given line.
How do we interpret the first four axioms in hyperbolic space?
We first have to agree on a model of hyperbolic space. We will choose the Poincare Disk
Model. We will think of all of hyperbolic space as living inside a disk. Putting an entire
infinite world inside a disk will lead to some distortion as you might expect. We think of
the center of the disk as being close to Euclidean geometry, but the closer we get to the
edge of the disk, the more distorted the picture will become. We have to think of the
boundary of the disk as being infinitely far away from the center of the disk. This means
that anything we see close to the edge of hyperbolic space will appear much, much
smaller than it actually is.
Lines: In hyperbolic geometry a geodesic line segment measures the shortest distance
between two points. There are two types of geodesics in the Poincare Disk Model (PDM).
Geodesics will be Euclidean line segments passing through the center of the disk, or
semi-circles, which meet the boundary of the disk in right angles.
Line segments: Any finite piece of a geodesic.
Circles: Given any center C and any radius R we can draw a circle of radius R centered
at C. Hyperbolic circles look just like Euclidean circles, but the center is not located
where a Euclidean center would be. The center of the circle will be slightly closed to the
boundary of the PDM than it’s Euclidean counterpart.
Angles: Right angles are congruent.
Infinitely many parallel lines: Given a line and a point not on the line, we can always
draw infinitely many parallel lines through the point. Remember that two lines are
parallel if they never meet. Because the geodesics in hyperbolic space include semicircles, we have a bit more freedom in our choice of geodesic.
The easiest way to see this is to choose a geodesic that is a fairly small semi-circle near
the boundary of the PDM. Now think of all the geodesics passing through the center of
the PDM. You can draw infinitely many of these straight looking geodesics that never
meet the semi-circle, so all of those are parallel to the small semi-circle.
Sum of the angles in a triangle: On the sphere the sum of the angles in a triangle is
always strictly less than 180 degrees.
These basic facts also turn the properties of this geometry on its head. We will have to
rethink all of our theorems and facts for hyperbolic geometry too. Here are some
examples of the difference between Euclidean and spherical geometry.
In Euclidean geometry an equilateral triangle must be a 60-60-60 triangle. In hyperbolic
geometry you can create equilateral triangles with many different angle measures. Take
for instance three ideal points on the boundary of the PDM. If we connect these three
ideal points by geodesics we create a 0-0-0 equilateral triangle. Moving the vertices into
the interior of hyperbolic space will result in equiangular triangles with small angle
measures. We will be able to create X-X-X triangles with 0 ≤ X < 60.
Having infinitely many parallel lines means that parallelograms will look different than
you expect!
Note that we cannot have squares or rectangles in hyperbolic space, because the sum of
the angles of a quadrilateral has to be strictly less than 360.
Exercises
2. Draw a hyperbolic disk, and draw five geodesics through the center.
3. In each hyperbolic disk shown, draw three geodesics through the point so that they
are parallel to the line shown.. that is, they shouldn't cross the line.
3a.
3b.
4. Draw three hyperbolic disks. Then draw:
a. A triangle with three 5° angles.
b. A 90°-5°-5° triangle (hint: put the 90° angle at the center).
c. A pentagon with five right angles.
5. Escher writes (in The World of M.C. Escher):
This woodcut, Circle Limit I, being a first attempt, displays all sorts of shortcomings.
Not only the shape of the fish, still hardly developed from rectilinear abstractions into
rudimentary animals, but also their arrangement and relative position leave much to be
desired...There is no continuity, no “traffic flow”, no unity of color in each row.
What does Escher mean by “traffic flow”? Compare traffic flow in Circle Limit I
with Circle Limit III.
6. Find the defect and area of the following hyperbolic polygons:
a. A triangle with three 5° angles.
b. A 90°-5°-5° triangle.
c. A pentagon with five right angles.
d. A 90°-0°-0° triangle. What does this triangle look like?
e. A 20°-20°-20°-20° quadrilateral.
7. Compute the angles, angle sum, defect, and area of the hyperbolic hexagon that is
part of the tessellation with six hexagons at a vertex, as shown in the text.
7. What is the area of the triangle in Circle Limit III? What is the area of the
quadrilateral?
8. What are the area(s) of the polygons in the underlying geometric tessellations of
Circle Limit I?
9. What are the area(s) of the polygons in the underlying geometric tessellations of
Circle Limit II?
1. What is the upper limit for the defect of a hyperbolic triangle?
10. What is the largest area a triangle can have? What is the smallest area a triangle can
have?
11. What is the largest area a quadrilateral can have? What is the smallest area a
quadrilateral can have?
12. See the quote on pg. 181 of Magic. Which print is Escher talking about? Explain
why each print requires twenty impressions.
13. Escher used angels and devils in three artworks. See Magic page 92, 93, 180 or
Schatt. page 150, 244, 296. Answer these questions for all three artworks:
a. How many creatures touch at one wingtip?
b. How many creatures touch at their feet?
c. Each creature is basically a triangle formed by the two wingtips and the feet.
From parts a & b, you know how many of these triangles come together at each
vertex. What are the corner angles of these triangles?
d. What are the angle sums of these triangles?
e. What geometry is each artwork based on?
14. Which of these Escher artworks are based on hyperbolic geometry?
a. Path of Life I (Schat 249)
b. Circle Limit I (Magic 180)
c. Circle Limit II (Magic 180)
d.
e.
f.
g.
h.
i.
Circle Limit III (Magic 180)
Verbum (Magic 80/Schatt 259)
Development II (Schatt. 291)
Square Limit (Magic 182)
Snakes (Magic 190)
Rippled Surface (Magic 109)
15. Describe the dual of the ideal tessellation by triangles shown in the text.
15. a. Consider the tessellation of the plane with equilateral triangles. Pick a vertex. It
has 6 neighbors (points which are 1 edge away). It has 12 “two-away neighbors”.
Fill in the rest of the table:
1-away neighbors
6
2-away neighbors
12
3-away neighbors
4-away neighbors
5-away neighbors
n-away neighbors
b. Now do the same for the icosahedron. Pick a vertex. It has 5 neighbors this time.
Fill in the rest of the table.. be careful - you'll need to count them.
1-away neighbors
5
2-away neighbors
3-away neighbors
4-away neighbors
5-away neighbors
6-away neighbors
c. Now do the same for the “hyperbolic paper” model of hyperbolic space. Pick a
vertex. It has 7 neighbors this time. You can count the 2-away neighbors, but
then things get hard. The formula for n-away neighbors is quite difficult.
1-away neighbors
7
2-away neighbors
3-away neighbors
4-away neighbors
5-away neighbors
n-away neighbors