Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Fundamental interaction wikipedia , lookup
Speed of gravity wikipedia , lookup
Condensed matter physics wikipedia , lookup
Circular dichroism wikipedia , lookup
History of subatomic physics wikipedia , lookup
Magnetic field wikipedia , lookup
Elementary particle wikipedia , lookup
Superconductivity wikipedia , lookup
Neutron magnetic moment wikipedia , lookup
Introduction to gauge theory wikipedia , lookup
Electromagnet wikipedia , lookup
Time in physics wikipedia , lookup
Relativistic quantum mechanics wikipedia , lookup
Mathematical formulation of the Standard Model wikipedia , lookup
Theoretical and experimental justification for the Schrödinger equation wikipedia , lookup
Field (physics) wikipedia , lookup
Electromagnetism wikipedia , lookup
Aharonov–Bohm effect wikipedia , lookup
Magnetic monopole wikipedia , lookup
Maxwell's equations wikipedia , lookup
Atomic theory wikipedia , lookup
Electric charge wikipedia , lookup
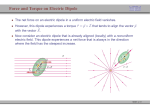
1 Chapter(1). Maxwell's Equations (1.1) Introduction. The properties of ordinary matter are a consequence of the forces acting between charged particles. Extensive experimental investigations have established the following properties of electrical charges: (1) There are two kinds of charges; these have been labled positive charge and negative charge. (2) Electrical charge is quantized. All particles so far observed carry charges which are integer multiples of the charge on an electron. In the MKS system of units, the charge on an electron is e= -1.60x10-19 Coulombs. By definition, the electron carries a negative charge and a proton carries a positive charge; the charge on a proton is 1.60x10-19 Coulombs. No one knows why charge comes in multiples of the electron charge. (3) The quantum of positive charge and the quantum of negative charge are equal to at least 1 part in 1020. This has been determined from experiments designed to measure the net charge on neutral atoms. (4) In any closed system charge is conserved; ie. the algebraic sum of all positive charges plus all negative charges does not change with time. This does not mean that individual charged particles are conserved. For example, a positron, which carries a positive charge of 1.60x10-19 Coulombs, can interact with an electron, which carries a negative charge of 1.60x10-19 Coulombs, in such a way that the electron and positron disappear 2 and two neutral particles called photons are produced. The total charge before and after this transformation occurs remains exactly the same, namely zero. The individual charged particles have disappeared but the total charge has been conserved. (5) Charged particles set up a disturbance in space which can be described by two vector fields; an electric field, E, and a magnetic field, B. Since these are vector fields they are characterized by a direction and a magnitude. Each of these fields at any point in space can be described by its components along three mutually perpendicular axes. For example, with respect to a rectangular cartesian system of axes, xyz (fig.(1), the electric field can be resolved into the three components Ex(x,y,z,t), Ey(x,y,z,t), and Ez(x,y,z,t) where the magnitude of 2 2 2 the electric field is given by Ep= Ex+Ey+Ez . The components √ of these fields depend upon the orientation of the co-ordinate system used to describe them, however the magnitude of each field must be independent of the orientation of the co-ordinate system. (6) The fields E and B are real physical objects which can carry energy, momentum, and angular momentum from one place to another. (7) The electromagnetic forces on a charged particle, q, can be obtained from a knowledge of the fields E, B generated at the position of q by all other charges. The force is given by F= q[E + (vxB)] (1.1) 3 z Ez E P Ey Ex y x Fig.(1.1) An electric field at any point in space, P, can be specified by its three components Ex, Ey, Ez. The magnitude 2 2 2 of the electric field is calculated from E = Ex+Ey+Ez . √ 4 where v is the particle velocity. (Notice that B has the units of an electric field divided by a velocity). Formula (1.1) applies to a spinless particle. In actual fact the situation is more complicated because most particles carry an intrinsic magnetic moment associated with its intrinsic angular momentum (spin). In the rest system of the particle its magnetic moment is subject to a torque due to the presence of the field B, and to a force due to spatial gradients of B. These magnetic forces will be discussed later. For the present we shall discuss only spinless charged particles, and we shall ignore the fact that real charged particles are more complicated. (8) Electric and magnetic fields obey the rules of superposition. Given a system of charges which would by themselves produce the fields E1, B1; given a second system of charges which would by themselves produce the fields E2, B2; then together the two systems of charges produce the total fields E = E1 + E2, and B = B1 + B2. (1.2) This rule enormously simplifies the calculation of electric and magnetic fields because it can be carried out particle by particle and the total field obtained as the vector sum of all the partial fields due to the individual charges. (9) In the co-ordinate system in which a charged particle is stationary with respect to the observer the electric and magnetic fields which it generates are very simple, see fig.(1.2): 5 q R rq P rp E Origin O R = rp-rq E = q R 4π ε0 R3 Volts/meter B = 0 . Fig.(1.2) The field due to a point charge of q Coulombs which is stationary with respect to the observer. 6 q R E = ( )( ) Volts/meter. 4π ε0 R3 (1.3a) B = 0 Webers/meter2. (1.3b) Equation (1.3a) is called Coulomb's law. The amplitude of the electric field decreases with distance from the charge like the square of the distance ie. ~1/R2 where the exponent is equal to two within 1 part in 1010. The MKS system of units has been used to write eqns(1.3) in which the electric field is measured in Volts/m and the charge is measured in Coulombs. A current of 1 Ampère at some point in a circuit consists of an amount of charge equal to 1 Coulomb passing that point each second. Distances in (1.3) are measured in meters. The factor of proportionality is 1 = 10-7 x c2 = 8.987x109 meters/Farad, 4π ε0 (1.4) where c= 2.9979x108 m/sec is the velocity of light in vacuum. The 1 size of is purely the consequence of the historical 4π ε0 definitions of the Volt and the Ampère. A second system of units which is very commonly used in the current magnetism literature is the CGS system in which distances are measured in centimeters, mass is measured in grams, and time is measured in seconds. In the CGS system the unit of charge- the statCoulombhas been chosen to make Coulomb's law very simple. In the CGS system the field due to a stationary point charge is given by 7 R E = q 3 statVolts/cm, R B = 0 (1.4) Gauss. The price that is paid for the simplicity of eqn.(1.4) is that the conventional engineering units for the current and potential, Ampères and Volts, cannot be used. The scaling factors between MKS and CGS electrical units involve the magnitude of the velocity of light, c. For example, in the CGS system the charge on a proton is ep= 4.803x10-10 esu whereas in the MKS system it is ep= 1.602x10-19 Coulombs. The ratio of these two numbers is ep ep esu = 2.9979x109 . (1.5) MKS (10) Consider a co-ordinate system in which a spinless charged particle moves with respect to the observer with a constant velocity v which is much smaller than the speed of light in vacuum, c: ie. (v/c)<<1. The electric and magnetic fields generated by such a slowly moving charge are given by 8 E(R,t) = B(R,t) = q R 4π ε0 R3 1 (v x E) c2 Volts/m Webers/m2. (1.6a) (1.6b) These expressions are correct to order (v/c)2. R is the vector drawn from the position of the charged particle at the time of observation to the position of the observer. Note that the moving charge generates both an electric and a magnetic field. The above fields can be used to calculate the force on a particle q2 located at R: F2 (t)= q2[E(t) + (v2 (t)×B(t))] Newtons. The particle q of eqns.(1.6) generates the fields that exert forces on the particle q2. Equations (1.6) are simplified versions of the general expressions for the electric and magnetic fields generated by a spinless point charge moving in an arbritrary fashion: see " The Feynman Lectures on Physics", VolumeII, page 21-1 (R.P.Feynman, R.B.Leighton, and M.Sands, Addison-Wesley, Reading, Mass., 1964). These expressions are E = q 4π ε0 2 R 3 + R d R3 + 12 d 2 R R c dt R c dt R Retarded R cB = R x E . Retarded (1.7a) (1.7b) 9 R(tr) Point of observation at the time t P Position of the particle at the retarded time R tr = t - c Position of the particle at the time of observation, t Trajectory of the Spinless Charged Particle Ep(t) = q R R d R 1 d2 R ( 3) + (c)dt( 3) + 2 ( ) 4π ε0 R R c dt2 R t =(t-R) r c 1 R Bp(t) = c R x Ep(t) tr Fig.(1.3) The electric and magnetic fields generated at the observation point, P, at the time t depend upon the position, velocity, and acceleration of the charged R particle at the retarded time tr= t - c . 10 See fig.(1.3). Expression (1.7) is complicated by the fact that it's R terms must be evaluated at the retarded time, tr= t - c , rather than at the time of observation, t. This corresponds to the requirement that changes in the motion of the particle can not be communicated to the observer faster than is permitted by the speed of light in vacuum. For a slowly moving particle, the first two terms of eqn.(1.7) add together to give Coulomb's law in which the distance R is evaluated at the time of observation rather than at the retarded time; in other words, one can ignore time retardation if v/c is small. The last term in eqn.(1.7) gives a field which is proportional to the component of acceleration perpendicular to the position vector R in the limit (v/c)<<1. This field decreases with distance like R-1 as opposed to the R-2 decrease of Coulomb's law. It is called the radiation field and is given by the expression Erad = q [a x R] x R R 4π ε0 c2R3 tc R cB = R R x Erad . tc (1.8a) (1.8b) (1.2) Maxwell's Equations. In principle, given the positions of a collection of charged particles at each instant of time one could calculate the electric and magnetic fields at each point in space and at each time from eqns.(1.7). For ordinary matter this is clearly an impossible task. Even a small volume of a solid or a liquid contains enormous numbers of atoms. A cube one micron on a side (10-6m x10-6m x10-6m) contains 11 ~1011 atoms, for example. Each atom consists of a positively charged nucleus surrounded by many negatively charged electrons, all of which are in motion and which will, therefore, generate electric and magnetic fields which fluctuate rapidly both in space and in time. For most purposes one does not wish to know in great detail the space and time variation of the fields. One usually wishes to know about the average electric and magnetic fields. For example, the average magnitude and direction of E over a time interval which is determined by the instrument used to measure the field. Typically this might be of order 10-6 seconds or more; a time which is very long compared with the time for an electron to complete an orbit around the atomic nucleus in an atom (10-16-10-21 seconds). Moreover, one is usually interested in the value of the fields averaged over a volume which is small compared with ~1 micron but large compared with atomic dimensions, ~10-10 meters. In 1864 J.C.Maxwell proposed a system of differential equations which can be used for calculating electric and magnetic field distributions, and which automatically provide the space and time averaged fields which are of practical interest. These Maxwell's Equations for a macroscopic medium are as follows: ∂B curlE = - ∂t (1.9a) divB = 0 (1.9b) ∂P ∂E curlB = µ0 Jf + curlM + ∂t + ε0µ0∂t (1.9c) divE = 1 ε0 (ρ f - divP) (1.9d) 12 where ε0µ0= 1/c2 and c is the velocity of light in vacuum. These equations underlie all of electrical engineering and much of physics and chemistry. They should be committed to memory. In large part, this book is devoted to working out the consequences of Maxwell's equations for special cases which provide the required background and guidance for solving practical problems in electricity and magnetism. In eqns.(1.9) ε0 is the permativity of free space; it has already been introduced in connection with Coulomb's law, eqn.(1.3). The constant µ0 is called the permeability of free space. It has the defined value µ0 = 4π x 10-7 Henries/meter. (1.10) Maxwell's equations as written above contain four new quantities which must be defined: they are (1) Jf, the current density due to the charges which are free to move in space, in units of Ampères/m2; (2) ρf, the net density of charges in the material, in units of Coulombs/m3; (3) M, the density of magnetic dipoles per unit volume in units of Amps/m; (4) P, the density of electric dipoles per unit volume in units of Coulombs/m2. In Maxwell's scheme these four quantities become the sources which generate the electric and magnetic fields. They are related to the space and time averages of the position and velocities of the microscopic charges which make up matter. (a) The Definition of the Free Charge Density, f. Construct a small volume element, ∆V, around the particular point in space specified by the position vector r. Add up all the 13 charges contained in ∆V at a particular instant; let this amount of charge be ∆Q(t). Average ∆Q(t) over a time interval which is short compared with the measuring time of interest, but which is long compared with times characteristic of the motion of electrons around the atomic nuclei; let the resulting time averaged charge be <∆Q(t)>. Then the free charge density is defined to be ρf(r,t) = <∆Q(t)> Coulombs/m3. ∆V (1.11) The dimensions of the volume element ∆V is rather vague; it will depend upon the scale of the spatial variation which is of interest for a particular problem. It should be large compared with atomic dimensions but small compared with the distance over which ρf changes appreciably. (b) Definition of the Free Current Density, Jf. The free charge density, ρf(r,t), will in general change with time as charge flows from one place to the other; one need only think of charge flowing along a wire. The rate at which charge flows across an element of area is described by the current density, Jf(r,t). It is a vector because the charge flow is associated with a direction. The components of the current density vector can be measured by counting the rate of charge 14 z Area ∆Ax oriented with its normal along x and centered at r. qi y x Let <∆Q> be the amount of charge which passes through the small area ∆Ax in a small time interval ∆t. Then <∆Q> Jf)x = ∆t ∆A Ampères/meter2. x It follows from this that one can also write Jf)x= ρfvx, where vx is the x-component of the velocity associated with the motion of the charge density distribution. Fig.(1.4) The current density due to a flowing charge distribution. 15 flow across a small area located at the position specified by r, and whose normal is oriented parallel with one of the co-ordinate axes; parallel with the x-axis, for example, ∆Ax, (see fig.(1.4).Now at time t measure the net amount of charge, <∆Q>, which has passed through ∆Ax in a small time interval, ∆t: positive charge which flows in the direction from +x to -x is counted as a negative contribution; negative charge wich flows from -x to +x also makes a negative contribution. The x-component of the current density is given by <∆Q> Jf(r,t)x = ∆t∆A x Amps/m2. (1.12) The other two components of Jf are defined in a similar manner. The time interval ∆t, and the dimensions of the elements of area, ∆A, are supposed to be chosen so that they are large compared with atomic times and atomic dimensions, but small compared with the time and length scales appropriate for a particular problem. Free charge density can be visualized as a kind of fluid flowing from place to place with a certain velocity. In terms of this velocity the free current density is given by Jf(r,t) = ρf(r,t) v(r,t). (1.13) In the process of charge flow electrical charge can neither be created nor destroyed. Because charge is conserved, it follows that the rate at which charge is carried into a volume must be related to the rate at which the net charge in the volume increases with time. The mathematical expression of this charge conservation law is 16 ∂ρf(r,t) = - divJf(r,t). ∂t (1.14) (1.3) Point Dipoles. In order to discuss the definitions of the two vector functions P(r,t) and M(r,t) it is first necessary to discuss the concepts of a point electric dipole and a point magnetic dipole. The Point Electric Dipole. Most atoms in a substance are electrically neutral, ie. the charge on the nucleus is compensated by the electrons moving around that nucleus. When examined from a distance which is long compared with atomic dimensions (~10-10m) the neutral atom produces no substantial electric or magnetic field. However, if, on average, the centroid of the negative charge distribution is displaced from the position of the nucleus the Coulomb field of the nucleus will no longer cancel the Coulomb field from the electrons. To fix ideas, think of a stationary hydrogen atom consisting of a proton and an electron. The electron moves so fast that on a human time scale its charge appears to be located in a spherical cloud which is tightly distributed around the nucleus (see fig.(1.5)). In the absence of an external electric field the centroid of the electronic charge distribution will coincide with the position of the nucleus. Under these circumstances the time-averaged Coulomb fields of the nucleus and the electron cancel each other when observed from distances that 17 Nuclear Charge q = + 1.6x10-19 Coulombs Time-averaged electron. A sperically symmetric ball of negative charge e = - 1.6x10-19 Coulombs. Radius~ 5x10-11 meters. Fig.(1.5a) A hydrogen atom in zero external electric field. Center of the negative charge distribution. Nuclear Charge E0 External Electric Field Fig.(1.5b) A hydrogen atom in a non-zero external electric field. The displacement of the electron cloud has been exagerated for purposes of illustration. 18 are large compared with 10-10m. If the atom is subjected to an external electric field the nucleus is pulled one way and the centroid of the electron cloud is pulled the other way (eqn.(1.1)): there is an effective charge separation (see fig.(1.5(b))). The Coulomb fields due to the nucleus and the electron no longer exactly cancel. Let us use the law of superposition to calculate the field which arises when two point charges no longer coincide; refer to fig.(1.6). The electric field at the point of observation, P, due to the positive charge is given by E+ = q r . 4π ε0 r3 The electric field at P due to the negative charge is given by E- = - q r+d . 4π ε0 (|r+d|3) Referring to fig.(1.6) one has r = xux + yuy + zuz , and r = x2 + y2 + z2 √ . For d oriented along the z-axis as shown in fig.(1.6), (r + d) = xux + yuy + (z+d)uz, 19 z P(x,y,z) r (r + d) +q y d -q x r = xû x + yû y + zû z d = dû z ûx,ûy,ûz are unit vectors along the co-ordinate axes. Fig.(1.6) Two charges equal in magnitude but opposite in sign are separated by the distance d. By definition the dipole moment of this pair of charges is p= qd where d is the vector distance from the negative to the positive charge. 20 so that or |r + d| = [x2 + y2 + (z+d)2]1/2 |r + d| = [x2 + y2 + z2 + 2zd + d2]1/2. Upon dividing out r2 this gives 2zd+d2 1/2 |r + d| = r [1 + ( )] . r2 From this expression one has 1 1 (2zd+d2) -3/2 = [1 + ] . |r+d|3 r3 r2 This is so far exact. Now make use of the fact that (d/r) is very small and use the binomial theorem to expand the radical; it is sufficient to keep only terms linear in (d/r). The result is 1 1 3zd ~ = 3 - 5 . 3 |r+d| r r (1.15) Use eqn.(1.15) to calculate the total electric field at the point of observation, P, correct to terms of order (d/r). The terms proportional to (1/r2) cancel leaving the field Ed = E+ + E- = 1 (3zqd)r qd - 3 . 5 4π ε0 r r (1.16) 21 By definition the dipole moment of the pair of charges is given by p=qd. Moreover, zqd= r·p, ie. the scalar product of the dipole moment and the position vector r. Finally, the expression for the electric field generated by a stationary point dipole can be written Ed = 1 3(p·r)r p - 3 . 5 4π ε0 r r (1.17) Although this expression has been obtained for the particular case in which p is oriented along z, the result eqn.(1.17) is perfectly general and is valid for any orientation of p. Expression (1.17) is so fundamental that, like Coulomb's law, it should be committed to memory. The field distribution around a point dipole is shown in fig.(1.7). The magnetic field generated by a stationary point dipole is, of course, zero. It is usefull to write the dipole field in terms of its components in a spherical polar co-ordinate system in which the dipole is oriented along the z-axis, see fig.(1.8): Er = 1 2pCosθ , 4π ε0 r3 (1.18a) Eθ = 1 pSinθ . 4π ε0 r3 (1.18b) 22 2E0 R P E0 E0 2E 2E00 E0 = 1 |P| 4π ε0 R3 Fig.(1.7) The electric field distribution around a point dipole. The electric field distribution has rotational symmetry around the dipole axis 23 z Er r Eθ θ Dipole P Er = 1 2pCosθ 4π ε0 r3 Eθ = 1 pSinθ . 4π ε0 r3 xy Plane These components are independent of the angle φ. Fig.(1.8) The electric field of a dipole oriented along the z-axis, written in spherical polar co-ordinates. 24 The Point Magnetic Dipole. Consider a spinless charge q revolving in a circular orbit of radius a with a speed v such that (v/c)<<1. One can use eqn.(1.6) to calculate the electric and magnetic fields at a distance from the center of the current loop which is very large compared with the orbit radius a, see fig.(1.9). Using the binomial expansion and keeping only the lowest order terms, it can be shown that the time averaged electric field is given by Coulomb's law: E = q r . 4π ε0 r3 The lowest order correction term upon taking the time average is proportional to (a/r)2, see problem (1.8). The magnetic field can be calculated using eqn.(1.6b). The velocity of the particle is proportional to the orbit radius, and therefore when the time averages are worked out the lowest order non-vanishing term is proportional to (a/r)2; see problem (1.8). The time-averaged magnetic field turns out to be given by µ 3(m·r)r m Bd = 4π0 - 3 , 5 r r (1.19) Notice that this expression has exactly the same form as eqn.(1.17) for the electric field distribution around an electric dipole moment p. Here the vector m is called the orbital magnetic dipole moment associated with the current loop, and 25 z P r y q x a a = aCosφ ûx + aSinφ ûy dφ v = a dt (-Sinφ Therefore, and m = ûx + Cosφ ûy) dφ axv = a2 dt ûz q(axv) qa2 dφ = 2 2 dt ûz Fig.(1.9) A charged particle following a circular orbit of radius a, and travelling with the speed v, generates a magnetic qav dipole moment |m|= 2 Ampère-meters2. 26 m = qa2 dφ 2 2 (dt) uz Coulomb-m /sec. (1.20) Note that |m|= IA where I= qv/2πa is the current in the loop, and A= πa2 is the area of the loop. Since the speed of the particle is given by v=a(dφ/dt), the magnitude of the magnetic moment can also be written in terms of the angular momentum of the circulating charge: |m| = qav q 2 = 2mp mpav , where the mass of the charged particle is mp and its angular momentum is L= mpav. Thus the magnetic moment m is related to the particle angular momentum L by the relation q m = (2m ) L . p (1.21) For an electron q= -1.60x10-19 C= -|e| so that the magnetic moment and the angular momentum are oppositely directed. The angular momentum is quantized in units of /h, therefore the magnetic moment of a particle is also quantized. The quantum of magnetization for an orbiting electron is called the Bohr magneton, µB. It has the value e/h µB = 2m = 9.27x10-24 Coulomb-m2/sec. e (The units of µB can also be expressed as Ampères-m2 or as Joules/Tesla). (1.21) 27 In addition to their orbital angular momentum, charged particles possess intrinsic or spin angular momentum, S. There is also a magnetic moment associated with the spin. The magnetic moment due to spin is usually written q ms = (g 2m ) S. p (1.22) For an electron q=-|e|, and g=2.00. The spin of an electron has the magnitude |S|= /h/2; consequently, the intrinsic magnetic moment carried by an electron due to its spin is just 1 Bohr magneton, µB. The total magnetic moment generated by an orbiting particle which carries a spin moment is given by the vector sum of its orbital and spin magnetic moments. The total magnetic moment associated with an atom is the vector sum of the orbital and spin moments carried by all of its constituent particles, including the nucleus. The magnetic field generated by a stationary atom at distances large compared with the atomic radius is given by eqn.(1.19) with m equal to the total atomic magnetic dipole moment. (1.4) The Electric and Magnetic Dipole Densities. Let us now turn to the definitions of the electric dipole moment density, P, and the magnetic dipole density, M, which occur in Maxwell's equations (1.9). The Definition of the Electric Dipole Density, P. Think of an idealized model of matter in which all of the atoms are fixed in position. In the presence of an electric field each 28 atom will develop an electric dipole moment; the dipole moment induced on each atom will depend upon the atomic species. Some atomic configurations also carry a permanent electric dipole moment by virtue of their geometric arrangement: the water molecule, for example carries a permanent dipole moment of 6.17x10-30 Coulomb-meters (see problem (1.12). Let the dipole moment on atom i be pi Coulomb-meters. Select a volume element ∆V located at some position r in the matter. At some instant of time, t, measure the dipole moment on each atom contained in ∆V and calculate their vector sum, Σpi. This moment will fluctuate with time, so it is necessary to perform a time average over an interval which is long compared with atomic fluctuations but short compared with times of experimental interest; let this time average be <Σpi>. Then the electric dipole density is given by P(r,t) = <Σpi> ∆V Coulombs/m2 . (1.23) The shape and size of ∆V are unimportant: the volume of ∆V should be large compared with an atom, but small compared with the distance over which P varies in space. In a real material the atoms are not generally fixed in position. In a solid they jiggle about more or less fixed sites. In liquids and gasses they may, in addition, take part in mass flow as matter flows from one place to another. This atomic motion considerably complicates the calculation of the electric dipole density because the effective electric dipole moment on an atom moving with respect to the observer includes a small 29 contribution from its magnetic dipole moment. The correction terms are of order (v/c) times the magnetic dipole moment and may be ignored for our purposes. The Definition of The Magnetic Dipole Density, M. This vector quantity is defined by M(r,t) = <Σmi> ∆V Amps/m, (1.24) where <Σmi> is a suitable time average over the atomic magnetic moments contained in a small volume element, ∆V, at time t and centered at the position specified by r. It is assumed that the atoms are stationary. If they are not, the magnetization density contains contributions which are proportional to (vi/c) times the various atomic electric dipole moments; the velocity vi is the velocity of atom species i with respect to the observer. We shall not be concerned with this correction which is, in most cases, very small. As above, the volume element ∆V is supposed to be large compared with an atomic dimension but small compared with the length scale over which M varies in space. 30 (1.5) Return to Maxwell's Equations. Now let us return to Maxwell's equations (1.9). A vector field is completely specified, apart from a constant field, by its curl and its divergence. Therefore, the two vector fields E and B are specified (ie. can be calculated) given the four source terms ρf(r,t), Jf(r,t), P(r,t), and M(r,t). Maxwell's equations should be committed to memory, along with the prescriptions necessary for calculating the divergence and curl of a vector field in the three major systems of co-ordinates: (1) cartesian co-ordinates (x,y,z); (2) cylindrical polar co-ordinates (r,θ,z); and (3) spherical polar co-ordinates, (r,θ,φ); see fig.(1.10). Vector derivatives are reviewed by M.R.Spiegel, Mathematical Handbook of Formulas and Tables, Schaum's Outline Series, McGraw-Hill, N.Y., 1968: Chapter 22. It is also worth reading the discussion contained in The Feynman Lectures on Physics, by R.P.Feynman, R.B.Leighton, and M.Sands, Addison-Wesley, Reading, Mass.,1964; Volume II, Chapters 2 and 3. Four very important vector theorems are listed in Appendix(1A). These theorems should be memorized because they will be used time after time. (1.6) Force Density in Matter. Having calculated the electric and magnetic field distributions in a piece of material one would like to use them to obtain the force density acting at each point. The force density is given by the sum of three terms. 31 (a) Cartesian System. z r = xû x +yû y +zû z P(x,y,z) y x (b) Cylindrical Polar System. z r = rû r + zû z P(r,θ,z) x = rCosθ r y = rSinθ y θ û θ r û r x (c) Spherical Polar System. z û r r = rû r P P(r,θ,φ) x = rSinθCosφ θ y = rSinθSinφ û φ r û θ y z = rCosθ φ x Fig.(1.10) The three major co-ordinate systems in common use. 32 (1) A term which is the direct analogue of the force exerted on a single charged particle moving with a velocity v, ie. f =q[E + (vxB)]. If this force is added together for all of the charges contained in a small volume ∆V, averaged over time, and divided by the volume element ∆V in order to obtain a force density, the result is Fq = ρfE + (Jf x B) Newtons/m3. (1.25) (2) If the electric field varies from place to place in space there is a contribution to the force density which is proportional to the electric dipole density. The origin of this force can be understood by examining the forces exerted on a model point dipole by an electric field, fig.(1.11). In fig.(1.11) the calculation has been explicitly written out for a dipole oriented along the x-axis. If a similar calculation is carried through for the dipole components oriented along y and z, and the resulting force components are added to obtain the total force on a dipole in an inhomogeneous electric field, the result is ∂E ∂E ∂E Fx = px( ∂xx) + py( ∂yx) + pz( ∂zx) = p· Ex (1.26a) ∂E ∂E ∂E Fy = px( ∂xy) + py( ∂yy) + pz( ∂zy) = p· Ey (1.26b) ∂E ∂E ∂E Fz = px( ∂xz) + py( ∂yz) + pz( ∂zz) = p· Ez . (1.26c) 33 x0 x0+d x -q +q At x0: the electric field components are Ex,Ey,Ez ∂E At (x0+d): the electric field components are Ex + ( ∂xx)d ∂E Ey + ( ∂xy)d ∂E Ez + ( ∂xz)d The force components on the negative charge are Fx = -q Ex Fy = -q Ey Fz = -q Ez The force components on the positive charge are ∂E Fx = qEx + qd( ∂xx) ∂E Fy = qEy + qd( ∂xy) ∂E Fz = qEz + qd( ∂xz) The net force components are: ∂E ∂E Fx = qd ( ∂xx) = px ( ∂xx) ∂E ∂E Fy = qd ( ∂xy) = px ( ∂xy) ∂E ∂E Fz = qd ( ∂xz) = px ( ∂xz) Fig.(1.11) The electric forces acting on a dipole oriented along the x-axis. 34 These force components can be summed over a small volume element and time-averaged in the usual way. When divided by the volume of the element ∆V to obtain force densities, the result is Fp = (P· Ex)ux + (P· Ey)uy + (P· Ez)uz N/m3. (1.27) Similar arguements can be used to show that the electric field exerts a torque density, Tp, on polarized material, where Tp = P x E Newtons/m2. (1.28) (3) It is not obvious at this stage of developement but magnetic forces are exerted on the magnetization density by a magnetic field gradient. The magnetic force density is given by an expression which is the exact analogue of that for the electric force density, eqn.(1.27): FM = (M· Bx)ux + (M· By)uy + (M· Bz)uz Newtons/m3. (1.29) The magnetic field also exerts a torque density on the magnetized matter, and this is given by the expression (analagous with eqn.(1.28)) TM = M x B Newtons/m2. (1.30) 35 (1.7) The Auxillary Fields D,H. It is sometimes useful to rewrite Maxwell's equations in terms of E, B, and two new vector fields D, and H. These new fields are defined by and D = ε0E + P (1.31) B = µ0(H + M). (1.32) Maxwell's equations when written using the derived field distributions become ∂B curlE = - ∂t (1.33a) divB = 0 (1.33b) ∂D curlH = Jf + ∂t (1.33c) divD = ρf (1.33d) Maxwell's equations have a simpler form when written this way, and may in consequence be easier to remember. Their physical content is, of course, unaltered by the introduction of the two auxillary fields. Maxwell's equations have been written in CGS units in Appendix(1B); this system of units is still used in much of the current literature on magnetism. The main virtue of the CGS system is that the fields E, D, B, and H all have the same units; this is 36 particularly usefull for the discussion of free space radiation problems. In the MKS system these four vectors all have different units. The main difficulty with the CGS system is that potentials and currents are not measured in practical units. 37 Appendix (1A) Four vector theorems which will be extensively used throughout this book are the following: (1) The curl of any gradient is zero. (2) The divergence of any curl is zero. (3) Gauss' Theorem; n̂ Volume V bounded by a A cosed surface S Element of area dS Consider a volume V bounded by a closed surface S. An element of area on the surface S can be specified by the vector dS= n̂dS where dS is the magnitude of the element of area and n̂ is a unit vector directed along the outward normal. Let A be any vector field. Then ∫S(A·n̂)dS = ∫VdivA where dτ is an element of volume. dτ 38 (4) Stokes' Theorem: n̂ Closed curve C A Element of dL area dS Consider any surface S which spans the closed curve C. Calculate the line integral of a vector A around the curve C; let the element of length along C be specified by dL. Then ∫A·dL = C ∫ScurlA·n̂ dS where the direction of the unit vector n̂ is related to the direction of traversal of curve C by the right hand rule. 39 Appendix (1B) In CGS units Maxwell's equations become 1 ∂B curlE = - c ∂t (B1) divB = 0 (B2) 4π ∂P 1 ∂E curlB = c Jf + c curlM + ∂t + c ∂t (B3) (ρ f (B4) divE = 4π - divP). In this system of units c= 2.998x1010 cm/sec. and E, and B have the same units (stat-Volts/cm). However, for historical reasons, the units of B are known as Gauss. 104 Gauss are equal to 1 Weber/m2: the unit 1 Weber/m2 is also called a Tesla. The electric field is measured in stat-Volts/cm where 1 stat-Volt is equal to 299.8 Volts; (yes, these are the same significant figures as occur in the speed of light!). An electric field of 1 stat-Volt/cm (sometimes stated as 1 esu/cm) is approximately equal to 30,000 Volts/m. If auxillary fields D, and H are introduced through the relations D = E + 4πP (B5) B = H + 4πM (B6) then in CGS units Maxwell's equations become 40 4π 1 ∂D curlH = c Jf + c ∂t (B7) divD = 4π ρf (B8) where the first two equations ( (B1) and (B2) ) remain the same. The vectors D, and H have the same units as E, and B although for historical reasons the units of H are Oersteds. The relation between charge density and current density in the MKS and the CGS systems can be deduced from the ratio of the proton charge as measured in both sets of units. This ratio is ep ep esu = 2.9979x109 . (1.5) MKS It follows from this ratio that 2998 esu/cm3 is equal to 1 Coulomb/m3. Similarly, a current density of 1 Ampère/m2 is equal to 2.998x105 esu/cm2. The conversion from MKS to CGS magnetic units is easy to remember since the earth's magnetic field is approximately 1 Oersted which is equal to 10-4 Tesla (Webers/m2).