
Sensor Networks
... Intelligence have to Sensor Networks? Problem: Randomly distributed sensor network, low power nodes, remote monitoring in a large scale environment Power efficiency Maximize Sensory function ...
... Intelligence have to Sensor Networks? Problem: Randomly distributed sensor network, low power nodes, remote monitoring in a large scale environment Power efficiency Maximize Sensory function ...

Data Communication Network
... identified by an IP address, and all hosts are physical network nodes. However, some datalink layer devices such as switches, bridges and WLAN access points do not have an IP host address (except sometimes for administrative purposes), and are not considered to be Internet nodes or hosts, but as phy ...
... identified by an IP address, and all hosts are physical network nodes. However, some datalink layer devices such as switches, bridges and WLAN access points do not have an IP host address (except sometimes for administrative purposes), and are not considered to be Internet nodes or hosts, but as phy ...

Ethernet LANs - University of Calgary
... Coaxial bus: Broadcast LAN all transmitted frames travel to and are processed by all adapters connected to bus. Hub-based star network: Also broadcast LAN – hosts are directly connected to a hub with twistedpair copper wire. Hub sends a copy out on all of its other ...
... Coaxial bus: Broadcast LAN all transmitted frames travel to and are processed by all adapters connected to bus. Hub-based star network: Also broadcast LAN – hosts are directly connected to a hub with twistedpair copper wire. Hub sends a copy out on all of its other ...

Layer One Networking
... Application layer Presentation layer Session layer Transport layer Network layer Data link layer Physical layer ...
... Application layer Presentation layer Session layer Transport layer Network layer Data link layer Physical layer ...
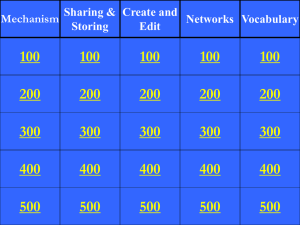
Question 1
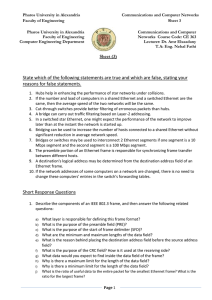
... 4. A bridge can carry out traffic filtering based on Layer-2 addressing. 5. In a switched star Ethernet, one might expect the performance of the network to improve later than at the instant the network is started up. 6. Bridging can be used to increase the number of hosts connected to a shared Ether ...
... 4. A bridge can carry out traffic filtering based on Layer-2 addressing. 5. In a switched star Ethernet, one might expect the performance of the network to improve later than at the instant the network is started up. 6. Bridging can be used to increase the number of hosts connected to a shared Ether ...

Computer Networks
... • Need to be able to able to detect errors that may occur on the imperfect transmission line ...
... • Need to be able to able to detect errors that may occur on the imperfect transmission line ...

Lecture 3 - Network hardware, Ethernet
... • Implemented on coaxial cable of up to 500 meters in length • Hosts connect by “tapping” into it. – Taps at least 2.5 meters apart ...
... • Implemented on coaxial cable of up to 500 meters in length • Hosts connect by “tapping” into it. – Taps at least 2.5 meters apart ...


Week 9
... Hub: physical layer repeaters repeat received bits on one interface to all other interfaces; no buffering Transmission by one node may collide with any node residing at any segment connected to the same hub twisted pair ...
... Hub: physical layer repeaters repeat received bits on one interface to all other interfaces; no buffering Transmission by one node may collide with any node residing at any segment connected to the same hub twisted pair ...

Data Modeling - Computer Science at Hiram College
... – Physical connection to the physical link (termination if needed) – Antenna for wireless – Processor chip(s) that implements protocols – Memory chip(s) for buffering ...
... – Physical connection to the physical link (termination if needed) – Antenna for wireless – Processor chip(s) that implements protocols – Memory chip(s) for buffering ...

Industrial communications first test
... signaling on pair of wires – small voltage detection thresholds, common mode rejection – improves performance over longer distances (1200m, any rate below 9600 baud); uses driver enable/disable – multidrop (up to 32 driver/receiver pairs can share a net). A RS485 bus behaves like a transm. line, the ...
... signaling on pair of wires – small voltage detection thresholds, common mode rejection – improves performance over longer distances (1200m, any rate below 9600 baud); uses driver enable/disable – multidrop (up to 32 driver/receiver pairs can share a net). A RS485 bus behaves like a transm. line, the ...


The Data Link Layer
... – No connection required but each frame is individually acknowledged – Useful for unreliable channel, such as wireless systems. – Transport layer may do message recovery but is more expensive than frame recovery at data link layer ...
... – No connection required but each frame is individually acknowledged – Useful for unreliable channel, such as wireless systems. – Transport layer may do message recovery but is more expensive than frame recovery at data link layer ...

Chapter 2 - William Stallings, Data and Computer
... data exchange can involve complex procedures. better if task broken into subtasks implemented separately in layers in stack each layer provides functions needed to perform functions for layers above using functions provided by layers below layers communicate using a set of rules known as a proto ...
... data exchange can involve complex procedures. better if task broken into subtasks implemented separately in layers in stack each layer provides functions needed to perform functions for layers above using functions provided by layers below layers communicate using a set of rules known as a proto ...

Slides
... Distributed systems consisting of interconnected nodes able to self-organize into network topologies with the purpose of sharing resources such as content, CPU cycles, storage and bandwidth, capable of adapting to failures and accommodating transient populations of nodes while maintaining acceptable ...
... Distributed systems consisting of interconnected nodes able to self-organize into network topologies with the purpose of sharing resources such as content, CPU cycles, storage and bandwidth, capable of adapting to failures and accommodating transient populations of nodes while maintaining acceptable ...

OSI Data Link Layer
... • Framing, Flow control, Error control (detection/correction), Access Methods • Makes use of physical address because with in the same network ...
... • Framing, Flow control, Error control (detection/correction), Access Methods • Makes use of physical address because with in the same network ...

Media Oriented Systems Transport
... - The working temperature is limited (below 85 °C) so it can not be used in the engine room ...
... - The working temperature is limited (below 85 °C) so it can not be used in the engine room ...
No Slide Title
... All devices are connected to one another in the shape of a closed loop, so that each device is connected directly to two other devices, one on either side of it. ...
... All devices are connected to one another in the shape of a closed loop, so that each device is connected directly to two other devices, one on either side of it. ...

MAC Protocols
... we learned how to do this already seldom used on low bit error link (fiber, some twisted pair) wireless links: high error rates • Q: why both link-level and end-end reliability? Network Layer ...
... we learned how to do this already seldom used on low bit error link (fiber, some twisted pair) wireless links: high error rates • Q: why both link-level and end-end reliability? Network Layer ...

MAC Protocols
... we learned how to do this already seldom used on low bit error link (fiber, some twisted pair) wireless links: high error rates • Q: why both link-level and end-end reliability? Network Layer ...
... we learned how to do this already seldom used on low bit error link (fiber, some twisted pair) wireless links: high error rates • Q: why both link-level and end-end reliability? Network Layer ...


Chapter 11: Approaches to Networking
... Signals must be propagated to all nodes used in transit in order to free up resources ...
... Signals must be propagated to all nodes used in transit in order to free up resources ...
