Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Genetic code wikipedia , lookup
History of genetic engineering wikipedia , lookup
Behavioural genetics wikipedia , lookup
Genetic drift wikipedia , lookup
Heritability of IQ wikipedia , lookup
Public health genomics wikipedia , lookup
Human genetic variation wikipedia , lookup
Genetic engineering wikipedia , lookup
Gene expression programming wikipedia , lookup
Microevolution wikipedia , lookup
Genome (book) wikipedia , lookup
Population genetics wikipedia , lookup
Genetic testing wikipedia , lookup
Genetic engineering in science fiction wikipedia , lookup
Epigenetics of neurodegenerative diseases wikipedia , lookup
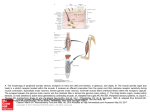
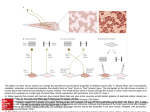
VIII INTERNATIONAL SYMPOSIUM ON COMPUTER SIMULATIONS IN BIOMECHANICS Motor Units Based Hierarchical Genetic Algorithm for Prediction of Muscle Force Activation Patterns Hristo Aladjov Rositsa Raikova July 2001 Centre of Biomedical Engineering, Bulgarian Academy of Sciences e-mail: [email protected], [email protected] The Problem How does the nervous system control muscles in order to perform movements. Muscles can only contract. More than one muscle is needed to control the position for single degree of freedom. Muscles consist of muscle fibers with various physiological properties. Motor Unit (MU) twitch is highly nonlinear function of time. Muscle force is a sum of all MUs twitches and depends on large amount of parameters: MUs firing rate, muscle length, contraction speed, fatigue, etc. The problem Page 1 Mathematical Model For one degree of freedom model there exists only one (joint moment) equation: One equation d1 F1 d 2 F2 ... d n Fn M external and set of constrains: i 0 Fi Fmax , i 1..n. Constrains Many unknowns for determining unknown muscle forces. Mathematical Model Page 2 Optimization Methods Why to use Optimization is suitable way for solving optimization indeterminate equations. The philosophy of optimization approaches is close to the natural process of adaptation and learning. What do we need For the purposes of the optimization multiple formal criteria must be defined. It is preferable if they have clear physiological interpretation. Precise model of muscle is needed in order to determine muscle force in a similar to the natural way. Optimization Methods Page 3 Muscle models Single force Muscle is presented as a single force. Phenomenological Phenomenological models - emphasizes on mechanical properties of the muscles, by considering them as a system of passive and contractive elements. Motor Unit Based Motor units based muscle model is presented in the current paper Changing Fmax, Tc, Thr, Ttw we model different types motor units. Muscle Models Page 4 Genetic Algorithms Purpose Advantages In the present work genetic algorithms are used as an multiobjective optimization tool for motor control investigation. Genetic algorithms does not restrict the internal representation of the model. They just control the process of decision searching. Each solution can be achieved by means of genetic operations with clear physiological interpretation. Like in human nervous system it is possible to define independent control mechanisms on different hierarchical levels reflecting one and the same controlled property. Multiple different solutions are investigated simultaneously. Advantages Page 5 Genetic Algorithms Drawbacks Genetic algorithms are not deterministic. They produce different solutions after consecutive executions. Generally they are slower then classical numerical approaches. In the sense of classical definition genetic algorithms are not able to solve time dependent problems, but here is presented approach that is able to overcome this disadvantage. Drawbacks Page 6 Genetic Algorithm Problem encoding MU1,1 MU2,1 MU3,1 MUp,1 MU1,2 MU2,2 MU3,2 MUp,2 MU1,n MU2,m MU3,k MUp,l Implementation Muscle1 Muscle2 Muscle3 Motor Center1 t1 t2 t3 t1 Motor Unit 1 t2 t3 t1 tn Motor Unit 2 Musclep Motor Center2 t2 Motor Unit K Motor Center3 Muscle 1 Genetic operations Parents 3.5 33 89 140 210 15 46 120 180 Offspring Crossover 3.5 33 120 180 15 46 89 140 210 3.5 33 Parent 140 210 Offspring Mutation 3.5 33 89 Crossover moment Implementation 210 89 Page 7 Genetic Algorithm GA for motor Choose the initial solution, by setting up the moments of neural stimulation of all MUs. control Use individual MUs twitches to calculate muscle forces, joint moments, reactions. Estimate solutions with respect to fitness function. Fitness function is weighted or pareto optimal combination of different criteria. Choose ( better ) solutions and modify them by means of genetic operations. Repeat the last three steps until given error threshold is reached. GA for motor control Page 8 Genetic Algorithm Idea Flowchart START Select MU or muscles for genetic operations Initialize MUs activation 1 Yes Continue evolution ? 3 Apply genetic operations over selected objects 2 4 No STOP Estimate population and select surviving individuals 5 Idea Page 9 Genetic Algorithm Performance Caching calculated muscle forces. boosting Techniques for reducing the number of estimation points Variable precision. Estimation point oscillations. Estimation with moving time frame. Synchronous mutation operation. Performance boosting Page 10 Results Elbow flexion y TRI BIC BRA BRD ANC O x l G Fitness Performance improvement 2 1.5 Method HGA w ithout Cache Pure HGA w ith Cache 1 HGA w ith Moving Frame 0.5 Time [h:m:s] 0 2:24:00 2:09:36 1:55:12 1:40:48 1:26:24 1:12:00 0:57:36 0:43:12 0:28:48 0:14:24 0:00:00 Results HGA Cache Variable precision Moving frames Oscillate estimation points Synchronous mutation Comp. time 02:07:13 01:19:11 00:25:37 00:23:27 00:24:20 00:39:02 Page 11 Fitness 0.07156 0.07156 0.06875 0.06155 0.06875 0.03636 Results Elbow flexion y TRI BIC BRA BRD ANC O x l G Fitness Performance improvement 2 1.5 Method HGA w ithout Cache Pure HGA w ith Cache 1 HGA w ith Moving Frame 0.5 Time [h:m:s] 0 2:24:00 2:09:36 1:55:12 1:40:48 1:26:24 1:12:00 0:57:36 0:43:12 0:28:48 0:14:24 0:00:00 Results HGA Cache Variable precision Moving frames Oscillate estimation points Synchronous mutation Comp. time 02:07:13 01:19:11 00:25:37 00:23:27 00:24:20 00:39:02 Page 12 Fitness 0.07156 0.07156 0.06875 0.06155 0.06875 0.03636 Results Elbow flexion y TRI BIC BRA BRD ANC O x l G Fitness Performance improvement 2 1.5 Method HGA w ithout Cache Pure HGA w ith Cache 1 HGA w ith Moving Frame 0.5 Time [h:m:s] 0 2:24:00 2:09:36 1:55:12 1:40:48 1:26:24 1:12:00 0:57:36 0:43:12 0:28:48 0:14:24 0:00:00 Results HGA Cache Variable precision Moving frames Oscillate estimation points Synchronous mutation Comp. time 02:07:13 01:19:11 00:25:37 00:23:27 00:24:20 00:39:02 Page 13 Fitness 0.07156 0.07156 0.06875 0.06155 0.06875 0.03636 Conclusions Current HGA realization is able to produce principally similar results during different runs, despite its non deterministic nature. Numerical experiments with 1 DOF elbow model showed that experimental observations as triphasic-behavior and antagonist cocontraction can be predicted. Introduced acceleration techniques show good improvement in speed without loss of precision. HGA can be used for detailed investigation of motor control mechanisms. Observed trends about the significance and role of separate criterion can be easily implemented in real time control algorithms Conclusions Page 14 Future plans Use HGA for modeling muscle activation patterns for more than one degree of freedom. Use HGA for investigating point to point movements. Obtain the initial solution as a result of experience and modify it on the basis of abstract goals. Investigate EMG-force relationship. Future plans Page 15