Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Voltage optimisation wikipedia , lookup
Current source wikipedia , lookup
Buck converter wikipedia , lookup
Stray voltage wikipedia , lookup
Mains electricity wikipedia , lookup
Opto-isolator wikipedia , lookup
Phone connector (audio) wikipedia , lookup
Alternating current wikipedia , lookup
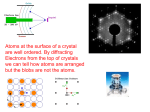
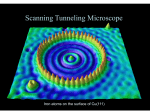
Analytical Techniques Used in production and R&D Crude view: High magnification microscope and high sensitivity titration (composition analysis) Basic Principles, capabilities, limitations Recent advances 2 23-May-17 Index Microscopy Scanning Probe Microscopy (SPM) e.g. STM, AFM and their variations Secondary Electron Microscopy (SEM) Analytical XPS(ESCA), AES, AAS, FTIR, SIMS,ICP-MS ... Others Thickness measurements Ellipsometry, Interferometry, Four point Probe FIB 3 23-May-17 SPM Scanning Probe Microscopy Atomic Force Microscopy (more commonly used now) Scanning Tunneling Microscopy (First) A 3 dimensional picture, at the best with atomic resolution DVD 10 um x 10 um image (color by software) ©Photometrics 23-May-17 Graphite X and Y scales 30 A, each bump is an atom Images for STM are from ©Leiden Univ, Netherlands 4 STM: Principle Basics Quantum Physics Probability of locating an electron in any region can be calculated Note The probability of finding an electron at a particular ‘point’ is zero To find the probability in a small region DxDyDz integrate the PDF The probability to find it rapidly decreases, as one moves from the ‘center’ point Prob Location 5 23-May-17 STM: Principle Basics If two conductors are brought close together close means 1 nm (approx 3 atomic distances) and a DC bias is applied prob of finding an electron on the ‘other’ side is non-zero Some of the electron ‘tunnels’ through the barrier Not the same as AC voltage ac current can pass through, because of the varying field Classical physics sufficient for AC voltage Not the same as breakdown (arcing) in DC If the field is strong, electrons overcome the barrier, not tunneling 6 23-May-17 STM: Principle Metal with electrons in conduction band. Electrons are at Ef and need work function F to escape from the metal 23-May-17 When probe and tip are brought together, they still need F to ‘jump’ above the barrier If the distance is small and a voltage is applied, electron can ‘tunnel’ through the barrier ©Leiden Univ, Netherlands 7 STM: Principle Tunneling depends very strongly (exponential) on the distance 3 A distance corresponds to 1000 times change in current Directly proportional to voltage (approx) Work function etc remain constant for a material 23-May-17 ©Leiden Univ, Netherlands 8 Scanning Tunneling Microscopy History In IBM, Binnig & Rohrer invented STM and were awarded Nobel Prize Design/Working Similar to Record player Sharp tip (probe) not touching the sample Applied voltage (few mV to few V) Piezo element for precise movement of tip (up/down) Precision galvanometer 23-May-17 ©Leiden Univ, Netherlands 9 Scanning Tunneling Microscopy If tip touches the sample (conducting sample), there will be (significant) current If tip is far away from sample, zero current At very small (1 nm or less) distances, tunneling current pico amp or nano amp Very strong dependence on distance e.g. If the distance increases by about 3 Angstroms, the current decreases by 1000 times! Feed back loop with piezo electric element Apply voltage to piezo electric element to change the length (and hence the distance between the probe and the sample) 23-May-17 10 STM: Operation Operation: Apply a voltage and bring the tip down, until a certain amount of current is measured (eg 1nA) Move the tip in X direction (horizontal) (actually the sample is moving in horizontal plane) using piezo electric material for very precise movement z If the sample is closer y tunneling current increases a pre-amplifier shows increasing current x converts it to a voltage A circuit checks it with a reference voltage (corresponding to some preset current, for example 1 nA) Difference in voltage is amplified , recorded and supplied to piezo tube 11 tip is pulled back 23-May-17 STM: Operation Electronics Also uses filters, PID controls in the circuits 23-May-17 ©Leiden Univ, Netherlands 12 STM : Operation Another piezo tube moves the sample in the x direction the operation is repeated moving the sample is better than moving the whole assembly of tip+piezo and electronic however, moving sample, in a precise manner is not very easy x and y resolutions are not as good as z resolution normal sample size is about an inch At the end of one x scan, the tip is brought back to the beginning, stepped a bit in y direction (again using piezo) and another ‘line scan’ begins The voltage applied to each piezo element (for x, y and z) are recorded used to create the final map 13 23-May-17 STM: Miscellaneous Graphite in atomic resolution What is meant by atomic resolution? Electronic Fermi level map Works for conductors Practically, for non conductors, can coat a thin film of gold one will not get atomic level resolution of original surface, but still very good resolution Easier to use in air/vacuum, more difficult in liquid medium 14 23-May-17 STM: Summary Atomic level resolution nm level resolution achieved repeatedly Better suited for conductors Instrumentation requirements Capability to detect very small current precisely Capability to move the tip in a very controlled and precise manner ( 0.1 A is the current advertised capability) Robust feed back electronics Sharp tip need not be exactly conical High aspect ratios are preferred Blunt tip will ‘convolute’ the image 15 23-May-17 AFM: Principle When a probe attached to a very fine spring is brought near a surface if the probe is far, there is not much force when the probe comes near, there is an attractive force when the probe comes very near, there is repulsion If one can monitor the force and keep it constant... Similar to keeping the ‘tunneling current’ constant Force Repulsion in STM... And record the voltage Distance applied to piezo, then one can get the topography Attraction 16 23-May-17 AFM: Construction Detail A very flexible spring puts very little load on the tip AFM spring constant is 0.1 N/m achieved used cantilever If spring constant is low, it is flexible If spring constant is high, then the tip will not ‘respond’ quickly if it is dragged over a surface with topography Hence tip with high spring constant will slow down the data acquisition (if one wants to do it correctly) Tip with low spring constant and mass is preferred corresponds to high resonant frequency 23-May-17 © US Navy Res Lab 17 AFM: Construction Detail © US Navy Res Lab Sample Tip images Normal SEM images of tips ‘super’ tip ‘ultra’ lever (home made) The end radius (~ 30 nm for normal & super tips and 10 nm for ultra) Limits the resolution (similar to wavelength in optics) 23-May-17 18 AFM: Construction Detail AFM: Tip structure Cantilever Note: STM had a ‘rigid’ probe structure Measurement of force optical lever ©Leiden Univ, Netherlands ©Muller Institute, Swiss 23-May-17 © US Navy Res Lab 19 AFM: Construction Detail Position Sensitive Detector (usually segmented detector) 4 or 2 segments Detector Schematic Intensity (i.e. Detected current) must be equal in all the four segments Laser, cantilever and detector are put together in a rigid mount If cantilever position moves, reflected beam will move Four segment (quadrant) can be used to detect lateral forces (measure torsion) also Lateral Force Microscopy (LFM) 20 23-May-17 AFM: Construction Detail Piezo construction Original construction with 3 orthogonal bars Newer construction with a tube Inner cylinder is one electrode, outer cylinder is segmented (typically 4) Constant potential between inner and outer cylinders will move the piezo in z direction (compression or tension) Potential difference between outer plates will move the piezo in (mainly) x or y direction ©Leiden Univ, Netherlands 21 23-May-17 AFM: Operation Sample is moved in x and y direction Cantilever moves up or down, depending on sample topography Lever movement is detected by segmented photo detector signal is amplified and compared with ‘reference’ or ‘pre-set’ value difference is amplified and fed back to the piezo cantilever (tip) is pulled back (for example) © US Navy Res Lab *PID controls included, filters to prevent ‘oscillation’ *When the tip is first brought close to the sample, one can see the tip getting pulled towards the sample (using a microscope) (attractive force) before repulsion 22 23-May-17 AFM: Operation Modes 1. Constant Force Mode: (with feed back control). a.k.a. Height mode (a) Contact Mode: The probe is in ‘contact’ with the sample working in repulsion regime better (more accurate) reproduction of surface topography tip wears off quickly, (tip is dragged over suface and lateral forces are significant) soft surface may get damaged (b) Non contact mode probe is bit farther from the sample (attraction regime?) resolution is worse than that in contact mode sample not damaged and tip life is longer (soft samples) however, tip may ‘jump’ to contact mode (e.g.water on the surface etc) 23-May-17 23 AFM: Operation Modes 1. Constant Force Mode: (with feed back control). a.k.a. Height mode (c) Tapping mode (®Digital Instruments) Probe oscillates at a particular frequency AC signal at the detector (in each segment) detected probe is probably in both the regimes (attractive and repulsion) better resolution than non contact mode, but longer tip life etc... 2. Constant Height Mode:(with out feed back control). a.k.a. Deflection mode Works for surface with out too much topography Tip is brought close to the sample and once a preset force is reached, tip is stopped sample scanned (line by line) and tip position is recorded (from the laser position). Tip is not moved up or down Tip can crash if the sample is rough! Relatively lower resolution Faster image acquisition (since tip need not move in z direction) 23-May-17 24 AFM: Tip Effects Compression effect If the sample is soft, it may get compressed when the tip comes close (compare the elasticity of probe vs surface). Probe has low spring constant Can actually be used (with slight modification) to measure surface hardness Note: The force is low , in nano Newton However, pressure can be MPa! Image broadening Due to large tip (Tip convolution) © US Navy Res Lab 23-May-17 © Univ. Bristol 25 AFM: Tip Effects Interaction Forces If other forces come into play e.g. Chemical , magnetic, etc If one is aware of it, more information can be obtained If not, image obtained is incorrectly interpreted! Aspect Ratio If sample has vertical features At the best, features with ‘probe aspect ratio’ can be measured accurately sharper features will still show ‘probe aspect ratio’ © Univ. Bristol 26 23-May-17 AFM: Miscellaneous STM not used regularly in the fab; more in R&D AFM applicable for insulators and conductors; used in fab and R&D labs Used after dep and CMP to measure ‘roughness’ RMS of the height Or any other feature (e.g. Poly after etch), to find side-wall slope aspect ratio issue can be overcome on one side by tilting the sample Tips are easy to change and are ‘reasonably’ expensive 27 23-May-17