Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Casimir effect wikipedia , lookup
Four-vector wikipedia , lookup
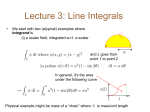
Feynman diagram wikipedia , lookup
Renormalization wikipedia , lookup
Field (physics) wikipedia , lookup
Introduction to gauge theory wikipedia , lookup
Density of states wikipedia , lookup
Conservation of energy wikipedia , lookup
Gibbs free energy wikipedia , lookup
Internal energy wikipedia , lookup
Nuclear structure wikipedia , lookup
Lorentz force wikipedia , lookup
Centripetal force wikipedia , lookup
Noether's theorem wikipedia , lookup
Aharonov–Bohm effect wikipedia , lookup
Electric charge wikipedia , lookup
Potential energy wikipedia , lookup
Work (physics) wikipedia , lookup
The potential (or voltage) will be introduced through the concept of a gradient. The gradient is another sort of 3-dimensional derivative involving the vector del except we don’t take the dot product as we did with the divergence. Here del operates on a scalar function – the potential– and returns a three component vector proportional to the derivative of V in each direction. We will use the gradient definition of the potential to prove the work-energy theorem where the potential is related to the kinetic energy carried by a charge and use this theorem to compute the potential that describes and electric field. Finally we will discuss the work required to assemble a collection of charges and use this work argument to derive this expression for the energy stored in an electric field. 1 A key concept of the potential is the curl which is yet a gain a third vector derivative. The curl is based on the cross product which as you recall “multiplies” two vectors to produce a third vector. In this case one of the vectors is del which multiplies another vector E and returns the curl vector. A standard definition of a cross product is in terms of determinant. The first row of the determinant are three unit vectors. For the curl the second row is the del operator and the third row is the E-field. Lets say that we can find a potential such that the three components electric field are given by the derivatives of a potential. Then inserting these derivatives into the curl determinant gives double derivatives of the potential. Interestingly enough each component of the result is the difference between two derivatives taken in different order. So the x-component involves first taking the derivative of V with respect to z and then with respect to y. We take this term and subtract the derivative of V with respect to y and then with respect to z. But for an analytic function such as V the order of differentiation doesn’t matter in a double derivative. Hence – if we can define a potential – the curl of the E-field must be zero. It turns out that in electrostatics the curl vanishes but in electrodynamics it won’t and we will need to revise our potential definition. We used the electric field and potential as our example but, of course, the curl of a divergence is always zero. We have introduced the curl in Cartesian coordinates but there are expressions for the curl in spherical and cylindrical coordinates inside the covers of Griffiths. 2 One of the important aspects of the potential V is connected with its role as a potential energy. It is remarkably simple to show (next page) that if no other forces but electrostatic forces are present T + qV is conserved where T is the kinetic energy of a particle and V is our voltage function. We can use to show how to construct potentials for a given E-field although it is clearly important in its own right. We begin by writing an expression for the change in T. The kinetic energy T only depends on the three components of a particle’s velocity v_x, v_y, and v_z. A change in T (called dT) can be due to a change in any of these three quantities and for infinitesimal changes in the velocity we can write this change due to v_x ,for example, as (partial T/partial v_x) dv_x. I will some times call this a Taylor expansion. In this context the partial of T with respect to v_x means hold all other variables that T depends on as constant. If we “divide” dT by the time interval dt we have the rate of change of kinetic energy. The partial of T wrt v_x is a simple derivative equal to m v_x etc. This is multiplied by the rate of change of the x velocity which is the x acceleration. The product of the mass times acceleration is the force. We thus have the very compact expression, that the rate of change of kinetic energy (or power) is the force dotted into the velocity. Interestingly enough, we will show in Physics 436 that this also works relativistically as well– although the KE expression needs to be modified. We can replay basically the same argument to get the rate of change of the voltage V. Here V is a function of the position x,y, and z. We get the rate of change of V is the gradient of V dotted into the particle velocity. 3 We define the total energy as the sum of the kinetic energy plus the charge times the voltage or Energy = T + qV. We couple together our rate of change expression for kinetic energy and voltage to show the rate of change of Energy is zero. Assuming that all we have acting on the particle is the electrostatic force, we write F as qE which is –q del V. We then insert this into our power expression to get the rate of change of T in terms of the gradient of the potential. We then add the rate of change of KE to the rate of change of the voltage expression and they cancel. Hence the rate of change of total energy is zero. This means the total energy is conserved. If a particle moves from r1 to r2 the total energy is at position r1 is the same as the total energy at position r2. A related concept is work. Recall from mechanics that the work that we do on a particle in moving it from position r1 to position r2 is the final KE which is T(r2) minus the initial KE which is T(r1). Since the total energy is conserved, this change in KE is related to the change in PE which is q times the voltage difference. We can prove the work-voltage connection directly from the rate of change of voltage expression we obtained on the previous slide by writing the vector velocity as d vec-path/dt. This leads to a way of computing the work by integrating the force dotted by the distance with a line integral from r1 to r2. We thus have an expression for the voltage difference in terms of the charge times the E-field line integral. The critical observation is that V is a function of position and hence a voltage difference only depends on the location of the initial and final points and not the path taken to go from r1 to r2. Since the voltage difference is given by the line integral of the field over the path taken, this means all possible paths have the same field line integral. 4 The essence of our result that the line integral or path integral along a path between two points is independent of the path chosen is the Stokes’ Theorem which relates the surface integral over the curl to the “round trip” path integral around a complete path. Since it is always possible to define a potential in electrostatics, this means the curl must vanish and hence the path integral around a complete path is always zero. This also ties into the work energy theorem which relates the line integral over E on a path between two points is the voltage difference between the two points. If we take a “round trip” path from one point all the way back to the point itself we will get the voltage difference between the voltage at a point to the voltage at the same point which is, of course, zero. The complete “round-trip” path integral is denoted with the circle through the integral sign. This is a second example of the fundamental theorem of calculus discussed in Griffiths Chp. 1 which related the integral of a derivative to the value of the function at the boundaries. Lets go through the analogies. The one dimensional integral in the fundamental theorem becomes a two dimensional surface integral. The one dimensional derivative becomes a curl derivative. The one dimensional limits become a line integral over the boundary of the surface. Again an N-dimensional integral over a derivative is equated to an N-1 dimensional integral over a boundary. In this case a two dimensional integral over a curl derivative is equated to a one dimensional line integral over the path that bounds the surface. Since the curl produces a vector, we must dot it into an area vector to produce the scalar E dot dL. The area vector is normal to the area as is the case in Gauss’s law but for this case we have a planar curve and there is no “outward” direction. Rather – for Stoke’s law – we assign the normal direction according to the right-hand rule. The area vector is the thumb direction when the fingers curl in the direction of dL line integral. This will play a crucial role in the convention used in Faraday’s Law which is our last chapter. Interestingly enough, although we often use a planar area, we can actually use any surface – concave or convex that connects with the contour. In all Stoke’s Law cases we use the RHR rather than the “outward” normal used for the divergence theorem area vector. 5 The proof of Stokes’ Thm is fairly instructive and fairly simple. We first consider an “infinitesimal” rectangular loop and will generalize to large loops later. Right now we stick to the x-y plane. Our path is counter clockwise. This means our area vector will be along the z-hat direction. We are going to compute the line integral around this indicated path and will show that it equals the z curl component. We will label the path segments by left , right, top, and bottom. Our notation is that E-vector and its derivatives are taken at the center of the rectangle. These partials are for both the x and y E-field components and are related to the right-left and top-bottom field differences. We begin by writing down the line integral in a counter clockwise path around our path starting at the point marked “start”. The contribution from each segment is the “directed” width of the segment times the component of the electric field in the direction of the segment. We end up with an expression involving the difference in the y component of the field from the left to the right side and the difference between the x component of the fields between the top and bottom. These differences are essentially the x and y derivatives of the field. The result is that the line integral is proportional to the area element DeltaX times DeltaY multiplied by same derivative difference that appears in the z-component of the curl of E. As you can see, the area vector given by the right-hand rule also lies in the z-direction. 6 The top half of this slide shows how the line integral of the 7 loops adds up to the overall line integral on the outside shown by the red path. The basic idea is that the interior portion of each of the inner loops cancel leaving just the paths along the overall circumference. Hence the sum of the interior line integral equals the circumferential line integral which we are interested in calculating. Adding the line integral of the seven loops together is equivalent to integrating the curl dotted into the area element -- this the z-component of the curl integrated over the area. The integral is over the area covered by the seven loops. This essentially proves Stokes’ Thm for a path in the x-y plane. As the cube illustrates, the Stokes’ Thm is not limited to a planar surface. Here we combine the area from two loops on different faces of the cube. Again the dashed interior segments cancel meaning the sum of the line integrals on the two faces gives the circumferential line integral for the path on the two faces. Undoubtedly much more elegant arguments can be used to make an iron-clad proof but I hope this makes the Stokes’ Thm plausible. 7 Our last step is to make the connection between Stokes’ Thm and the path independence of the work per unit charge which is related to the voltage difference. We can write the path integral of E around a complete “round trip” path as the difference between the blue and red path between r1 and r2. If the E-field has zero curl, the round trip path will vanish according to the Stokes’ Thm. Hence the voltage difference between any two points r1 and r2 can be evaluating using the work required to get from r1 and r2 by any path. This allows us to pick the most convenient path. 8 Here is an example of finding the potential for an unfamiliar E-field. This field has zero divergence and thus can exist in a charge free region of space. The first step is to see if it is even possible to define a potential by seeing if the curl of the E-field vanishes. Since we are in Cartesian coordinates we can do this using the determinant representation. The reference point can be chosen arbitrarily – although most of the time we use infinity as the reference or zero point. For this choice to work, however, the E-field must vanish at infinity, and must vanish faster than 1/r so the integral to infinity is finite. This is clearly not the case here since the E-field becomes infinite. Another choice might be the origin since the field is well defined there. We can take any convenient path to get from our reference (at the origin) to the point x,y,z. A straight line path will work. To avoid confusing a point on the path with the endpoint we will use X,Y,Z for the endpoint in this example. A point on the path to get from 0,0,0 to X,Y,Z can be parameterized as x=tX, y=tY,z=tZ where the start of the path is at t=0 and the end of the path is at t=1. The actual scale of t is arbitrary. We could multiply our parameterize path by any constant and then change the t value corresponding to the endpoint accordingly but this is perhaps the simplest choice. We next write the integrand which is E dot dL. The dL vector is the same as the dr vector which is differential in our path parameter t so dL = (X,Y,Z) dt. We next insert our parameterized (x,y,z) into our E-vector (x,y,z) and then form the E dot dL integrand. The integral can be written in terms of t and the limits of integration are from t=0 (start of path) and t=1 (end of path). It is important to remember that X,Y, and Z are just constants that help to parameterize the path. We are left with a very simple integral to compute the potential difference which is the negative of the work on a unit (q=1) test charge to get from the origin to the point X,Y,Z. We have computed the difference between the potential at X,Y,Z and the origin and the potential at the origin can be arbitrarily defined. Hence we only know V to within a constant. Once we have our V(X,Y,Z) expression, we can revert to the more conventional (lower case) V(x,y,z) notation since the capitalization notation has outlived its usefulness. 9 As simple as our previous path choice was, there are even simpler paths to evaluate from the origin to the point (x,y,z). Here we take a three step path shown in the figure. Work is accumulated only on the third leg of the path since while in the x-y plane only the Ex and Ey will contribute and both are proportional to z and thus vanish in the z=0 plane. The third leg turns into the integral of Ez (which is constant along the path) with respect to dz’ from z’ = 0 to z’=z. This time we use z’ to avoid confusion between the integral and the endpoint. The beautiful part of “finding the potential” problems is one can easily check the answer by taking the negative gradient of the “found” potential and showing you get the original E-field. This is easy since it is generally straightforward to take derivatives. The potential often tells us how to “engineer” a desired electric field. Our beta (yz x-hat + xz yhat + xy z-hat) electrical field has zero divergence which by Gauss’s law means there is no charge density. We can only get static electric fields using charges so evidently we create the field using charges that lie outside of the region where we want this field. But where should we place all of these charges? Recall from Physics 212, the conducting surfaces forms a equipotentials. For this field, we found that potential is of the form V propto x y z. For a given fixed z > 0 this means the equipotentials are hyperbolic surfaces. If we surround the region with hyperbolic conducting shells set to the indicated voltages (perhaps with batteries), the charges on inner conductor surface will naturally arrange themselves to create the desired electric field. In the next chapter on Laplace’s equation, we will prove that the electric field within a charge free region is uniquely determined by specifying the potentials on the surface which bounds the region. 10 It is instructive to consider the mischief one gets into when attempting to find the potential for an illegal E-field (i.e. a field with a non-vanishing curl). We show a red path and a blue path that takes us from the origin to our point x,y. Only the horizontal leg of the red path (marked #4) contributes work and only the vertical leg of the blue path (marked #2) contributes work. But the net work is different. Along #1 - #2 path the negative of the work or potential difference is – y^2 x while along the #3 - #4 path the potential difference is x y^2. Neither path produces a potential whose negative gradient reproduces our input E-field. And of course this is because the curl of the gradient of either potential will vanish and the curl of our input E-field does not. Interestingly enough, we always get zero curl for any E-field due to static charges as we show shortly. If we allow time varying charges, we can get fields with non-zero curl as we show later. 11 Since the Coulomb field is spherically symmetric about an electric charge, it is convenient to express the curl in spherical coordinates. Here is a reminder of the form of the position vector in spherical coordinates and the Cartesian components of the theta, phi and r unit vectors. 12 Although less tedious approaches exist for writing the curl in spherical coordinates, the three step method which we used for the divergence based on transforming the derivative using the chain rule will work for the curl as well. We get forms that resemble the determinant form for Cartesian coordinates but with extra complicating factors due to the fact that the direction of the spherical unit vectors at a given point depends on the position of the point. For a central force such as Coulomb’s law with the charge at the origin, only the radial component of E exists and this radial component only depends r and not theta or phi. From our expression for the curl, we see this means the curl of E must vanish. In electrostatics , the only source of electrical fields is charges. Hence E-fields can always be written as superposition integral over a charge density. Lets apply the curl to this integral expressions. Since the curl only involves derivatives over the “observer” coordinate, the curl sails through the charge density piece and only operates on the “Coulomb” piece of the expression which involves the observer coordinate. This curl vanishes since the Coulomb force is a central force. We thus quickly reach the very powerful conclusion that the curl of an electrostatic E-field always vanishes. This means a path independent potential can always be defined in electrostatics. Once the sharp theoretical tools are developed, the proof is like slicing through butter. 13 An important theme in Physics 435 and 436 will be the stored energy in electromagnetic fields. As our first example we will use the work-potential theorem to calculate the amount of work required to assemble a collection of charges which are brought in from infinity. For this purpose and most purposes, it is convenient to define the zero of potential at infinity (but as you know the reference point for a potential is arbitrary). We use the work-energy theorem to compute the potential for the single-charge Coulomb field. We get the hopefully familiar result that you all remember from Physics 212 which is potential is Coulomb’s constant time the charge divided by the distance to the charge. We can easily check this result by taking the gradient of our potential. We know that the negative of the gradient must equal the electrical field. In spherical coordinates the r-component of the gradient is just the derivative of the potential with respect to r. Indeed we recover the Coulomb field using our expression for Coulomb potential. I typically always travel radially outward when computing the potential for cylindrically symmetric or radially symmetric charge distribution to avoid the following confusing point. Imagine that to save some time you decide to have your test charge travel from infinity to the desired radius to get V(r) (ie V(r) – V(infinity) = V(r)) directly rather than –V(r) or V(infinity) – V(r)). A seemingly logical approach is to invert the limits since we now start from infinity and arrive at r as well as the dL vector which would become -r-hat dr since we are now traveling radially inward. But if we invert the potential expression, the limits, and dL we have three minus signs which negates our Coulomb potential. We can clearly see the negated expression is wrong since we no longer get the E-field from the negative gradient of our potential but what went wrong?? I think the problem is connected with the meaning of the dr piece of the integral expression and how it relates to the limits of integration. Basically in the integration process dr is positive and is tied to the coordinate system and thus dL is still r-hat dr. The direction of travel is communicated by the order of the limits. We “double count” if we invert both the limits and the dL direction. 14 Lets use the “Coulomb” potential to compute the work required to pull three charges from infinity and place them on the corners of an equilibrium triangle of side a. We are able to place the first charge at one corner for free since no forces act on it and thus no work is required. The next charge requires work since it is repelled from the first charge. By the work-potential theorem this work is the charge times the potential difference from infinity to the position a which is just Q time Q/(4 pi epsilon_0 a). Positive work is required since we are essentially sliding the second charge up the potential hill created by the first charge. Two down and one to go. The beauty of the potential energy concept and superposition is to get the potential of the third charge one simply adds the potential due to the first two charges. By the work-potential theorem, the work required to move the third charge in position is just Q times its final potential (relative to infinity). Hence the total work required to assemble the equilateral triangle is the sum of the work required for the second charge plus the work required for the third charge or 3Q^2/(4 pi epsilon_0 a). We can think of this work as the stored energy in the three charge system or U since indeed if we released the three charges by breaking the legs of the triangle, U would be converted to kinetic energy as the three charges exploded apart. 15 We can generalize from this example. Rather than computing the work to assemble each charge one at a time, we can think in terms of the potential of each corner charge due to the other two charges. Each charge experiences a potential of 2Q/(4 pi epsilon_0 a) due to the other two charges. We might be tempted to write the stored energy as 3 times the charge times this potential but in this case we would get 6Q^2/(4 pi epsilon_0 a) and our previous answer was 3Q^2/(4 pi epsilon_0 a) . Evidently our naïve expression double counted the energy of each charge pair by assigning the Q^2/(4 pi epsilon_0 a) to both charges in the pair even though it is due to their mutual interaction. A clean way of dealing with the double counting this is to use summation notation. We write the stored energy as double sum over the potential times the charge where the second sum over charge j is for charges are numbered “higher” than the given charge which is numbered as i. Rather than inflicting the order that j > i we can use either j > i or j < i (as long as i ne j) and compensate by dividing by two. The big advantage of this approach is that the sum over j not equal to i is just the potential “on” charge i due to all other charges in the system. This form naturally leads to a continuum expression where the charge is replaced by rho d tau where rho is the volume charge density and d tau is an infinitesimal volume. In the integral expression, the index i is replaced by the position vector r that points to the charge. V_i or the potential on charge i becomes the V(r) or the potential at position r. There is a slight subtlety here. In our original summation convention it is clear that the potential is due to all other charges. This is imposed by the condition that j ne i . In our integral expression, it is much more convenient to think of V(r) as the potential due to all charges in the system which isn’t quite the same. But as long as rho is finite, the piece of the potential due to each infinitesimal charge contribution rho (r) d tau is infinitesimal itself and hence our simple expression is correct to within an infinitesimal which is fine. We are thus left with the boxed expression (our Master Equation) for the energy stored in a continuous charge distribution rho(r). We will obtain an even more elegant expression using an integration by parts expression on the next slide. 16 Recall the integration by parts trick you learned in calculus. One starts with the differentiation of a product rule –in this case we are taking the derivative of a function u(x) times v(x). We then integrate both sides with respect to x. The left most term is the integral of a derivative which is the function itself or u(x) v(x). With some simple re-arrangement, we can use this to “transfer” a derivative from one term (such as dv/dx) to another term (such as du/dx). We compensate for this transfer by adding a “parts-part” which in this case is the product of u(x) v(x). The same trick can be used for vector calculus inspired product derivatives. For example, using the product rule you can easily show that the divergence of a scalar function times a vector function can be written as scalar times the divergence of the vector plus the vector times the gradient of the scalar function. We can integrate both sides over a volume. We can write the “parts-part” as a surface integral using the divergence theorem. This neat but easy to prove theorem can be applied to our potential energy expression in a particularly elegant way. We can use the differential form of Gauss’s law to replace the charge density with the divergence of the electrical field. We have effectively “abstracted” out the charge density entirely and now have a stored energy expression that only involves the E field type quantities – ie the field itself and the potential whose gradient is the field. If we can use our “divergence” version of the integration by parts, we can transfer the del from the E field to the potential V and the gradient of the potential is the E field. We thus have a stored energy that involves an integral over the square of the electric field. Of course we still need to include the pesky “parts-part” which is a surface integral of the potential times the E-field. 17 It is often desirable to eliminate the parts part and just have a volume integral over the squared Efield. We can usually do this by exploiting the freedom we have in choosing the integration volume V. If we are interested in the energy stored in the charges density rho(r) we must choose V big enough to enclose all of the charge in our original expression where U = (1/2) integral rho(r) times V(r). But once we enclose all of the charge we can make the integration volume as large as we like. For example if we use an infinite integration volume both V and E will generally disappear faster than the surface area and thus the “parts part”, or voltage times E-field surface integral will disappear. Hence usually if we take the volume to infinity we are just left with an integral over the squared E-field. In this case it is tempting to think of the energy as residing in the field itself and epsilon E^2/2 is the volumetric energy density. This is a fine way of viewing the energy or we can stick to our original view as U is the work required to assemble the charge configuration from infinity. There is no unique “correct” way of viewing U – it’s a fairly arbitrary choice as to whether one views the energy as stored in the field or the charge but it seems cooler to me to thing of the energy as a field energy. As a quick illustration of the idea an technique lets consider the energy stored in a spherical shell of charge of radius R. A very simple way of calculating this energy is to use our original formula as half of the volume integral of the charge density times the potential. Since all of the charge resides on the area of the spherical shell we could cast this as half of the surface integral of the charge times the voltage or since the voltage is constant we can factor it out and write the stored energy as half of the charge times the voltage. This is probably the simplest way of computing the energy, but alternatively we could integrate the field energy density over all space. The volume element is 4 pi r^2 dr and we start the integral from r = R since there is no field within the sphere according to Gauss’s law. Nearly as quickly , we get the same energy storage as before. 18 Just for fun, lets compute the stored energy using our expression for the stored energy in terms of our integration by parts expression where we still have a partspart or surface integral since we consider a finite volume. Rather than integrating the radius to infinity we will integrate out to a radius d where d > R so that we still contain all of the charge. The field part picks up a piece proportional to (1/R – 1/d). The surface term also has a 1/d piece which cancels the 1/d from the field piece leaving the same answer as before. If we were to put d at R we would have no contribution from the field piece and the full contribution would be from the surface integral. If we had incorrectly tried to use d < R we would have zero from the field piece since E vanishes inside the shell and of course the surface piece would also be zero since it is proportional to E as well. We would have concluded that it takes no work to assemble the spherical shell of charge by improperly choosing a volume that fails to contain all of the charge – in this case we are choosing a volume that contains none of the charge and hence get zero stored energy. 19 The spherical shell is a simple way of illustrating another important point. For this we consider a two shell system with an inner radius (R1) with –Q and an outer radius (R2) with +Q. From Gauss’s law we know that the only non-zero E field exists from R1 < r < R2. We can thus take our integration volume to infinity to avoid the surface contribution, but only the region between the two spheres will contribute. We again get a very simple form for the stored energy that depends on (1/R1 – 1/R2). Usually energies just add as scalars. Do the stored energies of the two charges add? Evidently not since the stored energy of the +Q charge acting alone is U+ = Q^2 / ( 8 pi epsilon_0 R2) and the stored energy of the –Q charge acting alone is U- = Q^2 / ( 8 pi epsilon_0 R1) and hence the sum of the two energies is proportional to (1/R1 + 1/R2) and not (1/R1 – 1/R2). The flaw in the idea that one can just add the stored energies of pieces of a charge distribution to get the total stored energy is due to interference of the two electric fields which is due to the “cross term” proportional to 2 E+ dot E-. I call this the interference term since the same sort of term is responsible for the interference fringes in a double slit interference experiment. This interference term is very easy to compute as we show on the next slide. 20 The interference term involves an integral over the region where both E+ and E- are non-zero. This is the region where r > R2 since E+ turns on once r > R2. Again the interference integral is fairly simple to compute. If we add it to U+ + U- we go from an incorrect expression proportional to (1/R1 + 1/R2) to the correct expression proportional to 1/R1 – 1/R2. Presumably if we used two spheres with the same charge rather than opposite charges, the interference term would change sign while U+ and U- would not (since U+/- is proportional to the square of the charge). We can thus write down the correct expression for the same charge case very simply. We can check the same charge case by computing the stored energy of a shell with 2Q and adding it to the work in moving a unit test charge from R2 to R1 in the electrical field due to a shell with charge Q. 21