Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Mathematics of radio engineering wikipedia , lookup
Stray voltage wikipedia , lookup
Fault tolerance wikipedia , lookup
Alternating current wikipedia , lookup
Switched-mode power supply wikipedia , lookup
Mains electricity wikipedia , lookup
Electrical substation wikipedia , lookup
Resistive opto-isolator wikipedia , lookup
Flexible electronics wikipedia , lookup
Current source wikipedia , lookup
Buck converter wikipedia , lookup
Earthing system wikipedia , lookup
Regenerative circuit wikipedia , lookup
Signal-flow graph wikipedia , lookup
Integrated circuit wikipedia , lookup
Rectiverter wikipedia , lookup
Opto-isolator wikipedia , lookup
Circuit breaker wikipedia , lookup
Two-port network wikipedia , lookup
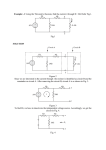
1 Second-order dynamic circuits Dynamic circuits containing two capacitors or two inductors or one inductor and one capacitor are called second-order circuits. In this section we learn how to formulate the equation governing such circuits. Linear circuits Two–capacitor configuration Let us consider a circuit containing linear resistors, linear controlled sources, independent sources and two capacitors. We extract both capacitors from the circuit creating a linear resistive two-port LRTP as shown in Fig. 1. i1 i2 iC2 iC1 C1 vC1 LRTP v1 C2 v2 vC2 Fig. 1 We choose capacitor voltages vC1 v1 and vC2 v 2 as state variables and write a system of two first-order differential equations C1 C2 dvC1 dt dv C 2 dt iC1 i1 , (1) iC 2 i 2 , where i1 and i2 are the port currents. Since the port currents are not state variables, we express them in terms of vC1 v1 and vC2 v 2 . For this purpose we terminate the two-port by voltage sources v1 and v2 (see Fig. 2) and solve the circuit for the port currents i1 and i2. i2 i1 v1 LRTP Fig. 2 v2 2 To find i1 and i2 we apply the superposition theorem. First we consider the circuit driven by the voltage source v1 acting alone. Thus, we set to zero the voltage source v2 and all the independent sources inside the LRTP. As a result we obtain the circuit shown in Fig. 3. ~ i2 ~ i1 LRTP without independent sources v1 Fig. 3 ~ ~ In this circuit the currents i1 and i2 are given by the equations ~ i1 g11v1 , ~ i2 g 21v1 , (2) where g11 and g21 are constants. Next we consider the circuit driven by the voltage source v2 acting alone (see Fig.4) and solve ~ ~ ~ ~ it for i1 and i2 ~ ~ i2 ~ ~ i1 LRTP without independent sources v2 Fig. 4 As a result we find ~ ~ i1 g12 v 2 , ~ ~ i2 g 22 v2 , (3) where g12 and g22 are constants. Finely we set to zero v1 and v2 and consider the circuit driven by the independent sources inside the LRTP (see Fig. 5). We solve this circuit for the port currents iS1 and iS2 . 3 i S2 i S1 LRTP Fig. 5 According to the superposition theorem we write ~ ~ ~ i1 i1 i1 i S1 g11v1 g12 v 2 iS1 , ~ ~ ~ i2 i2 i2 iS2 g 21v1 g 22 v 2 iS2 . (4) Substituting equations of the set (1) in place of i1 and i2 and replacing v1 and v2 by vC1 and v C2 we obtain, after simple rearrangement, the state equations describing the circuit shown in Fig. 1 dvC1 dt 1 1 1 g11vC1 g12 vC2 iS1 , C1 C1 C1 (5) dv C 2 1 1 1 g 21vC1 g 22 vC2 iS , dt C2 C2 C2 2 where i S1 and i S2 are generally time-varying currents. The system of equations (5) can be presented in matrix form dvC AvC bt , dt (6) where 1 dvC1 C iS1 vC1 dv d t 1 C , A , bt vC , d v 1 d t vC 2 C2 C iS 2 dt 2 To illustrate the described approach we consider a simple example. Example 1 Given the second-order circuit shown in Fig. 6 g11 C1 g 21 C2 g12 C1 . g 22 C2 4 R1 i1 R2 C1 v1 vC1 i2 v2 C2 R3 vC2 Fig. 6 To formulate the state equations describing this circuit we consider the linear resistive oneport consisting of resistors R1, R2, and R3, terminated by voltage sources v1 and v2 as shown in Fig. 7. We solve this circuit for i1 and i2 using the superposition theorem. R1 R2 i2 i1 v1 R3 v2 Fig. 7 First we set v2 = 0 and analyse the circuit shown in Fig. 8. ~ i1 R1 R2 v1 ~ 2 R3 Fig. 8 As a result we obtain ~ i1 v1 , R2 R3 R1 R2 R3 ~ ~ i2 i1 R3 R3 v1 . R2 R3 R1 R2 R1 R3 R2 R3 Thus we have ~ i1 g11 v1 , g 11 1 , R 2 R3 R1 R2 R3 (7) 5 ~ i2 g 21v1 , g 21 R3 . R1 R2 R1 R3 R2 R3 (8) Next we set v1 = 0 and analyse the circuit shown in Fig. 9. ~ ~ i1 R1 R2 ~ ~ i2 R3 v2 Fig. 9 As a result we obtain ~ ~ i2 v2 , RR R2 1 3 R1 R3 ~ ~ ~ ~ i1 i2 R3 R3 v2 . R1 R3 R2 R1 R2 R3 R1 R3 Hence, we have ~ ~ i1 g12 v 2 , g12 ~ ~ i2 g 22 v 2 , R3 , R2 R1 R2 R3 R1 R3 g 22 1 . R1 R3 R2 R1 R3 (9) (10) According to the superposition theorem we write i1 g11v1 g12 v 2 , i2 g 21v1 g 22 v 2 . Since dvC1 dv1 C1 , dt dt dvC 2 dv i2 C 2 2 C 2 , dt dt i1 C1 and v1 vC1 , v 2 vC2 , we obtain after simple rearrangements the state equations (11) 6 dvC1 dt g11 g vC1 12 v C2 , C1 C1 (12) dv C 2 g g 21 vC1 22 vC2 , dt C2 C2 where g11, g21, g12, g22 are given by (7)-(10). Two–inductor configuration Let us consider a circuit containing linear resistors, linear controlled sources, independent sources and two inductors. We extract both inductors from the circuit creating a linear resistive two-port (LRTP) as shown in Fig. 10. i2 i1 vL1 L1 LRTP v1 v2 iL1 L2 vL2 L2 Fig.10 We choose inductor currents i L1 i1 and i L2 i2 as state variables and write a system of two first-order differential equations L1 L2 di L1 dt di L2 dt v L1 v1 , (13) v L2 v 2 , where v1 and v2 are the port voltages. Since v1 and v2 are not state variables, we express them in terms of i L1 and i L2 . For this purpose we terminate the two-port by current sources i1 and i2 (see Fig. 11) and solve the circuit for the port voltages v1 and v2. i1 v1 LRTP Fig. 11 v2 i2 7 To find v1 and v2 we apply the superposition theorem. First we consider the circuit driven by the current source i1 acting alone. Thus, we set to zero the current source i2 and all the independent sources inside the LRTP. As a result we obtain the circuit shown in Fig. 12. i1 ~ v1 v LRTP without independent sources ~ v2 Fig. 12 In this circuit the voltages v~1 and ~ v2 are given by the equations v~1 r11i1 , v~ r i , 2 (14) 21 1 where r11 and r22 are constants. Next we consider the circuit driven by the current source i2 acting alone (see Fig. 13) and ~ ~ solve it for v~1 and v~2 . ~ v~1 LRTP without independent sources ~ ~ v2 i2 Fig. 13 As a result we find ~ v~1 r12 i2 , ~ v~2 r22 i2 , where r12 , r22 are constants. Finally we set to zero i1 and i2 and consider the circuit driven by the independent sources inside the LRTP (see Fig. 14). We solve this circuit for the port voltages v S1 and v S2 . 8 vS1 LRTP vS 2 v Fig. 14 According to the superposition theorem we write v1 v~1 v~2 v S1 r11i1 r12 i2 v S1 , ~ v2 ~ v2 v~2 v S2 r21i1 r22 i2 v S2 . (15) Substituting the equations (13) in place of v1 and v2 and replacing i1 and i2 by i L1 and i L2 we obtain, after simple rearrangement, the state equations describing the circuit shown in Fig. 10. di L1 dt r11 r 1 i L1 12 iL2 v S1 , L1 L1 L1 di L2 (16) r r 1 21 i L1 22 iL2 v S2 , dt L2 L2 L2 where v S1 and v S2 are generally time varying voltages. The system of equations (16) can be presented in matrix form di L Ai L b( t ) , dt where diL1 iL1 diL dt , bt iL , i d i d t L2 L2 dt 1 r r11 vS1 12 L1 L L1 , A 1 . 1 r22 r21 vS L L L2 2 2 2 Example 2 Let us consider the second-order circuit shown in Fig. 15 (17) 9 R1 i1 vL1 R2 L1 v1 R3 i2 vL2 v2 L2 iL2 iL1 Fig. 15 To formulate state equations describing this circuit we consider the linear resistive one-port consisting of the resistors R1, R2, and R3, terminated by current sources i1 and i2 as shown in Fig. 16. We solve this circuit for v1 and v2 using the superposition theorem. R1 i1 R2 R3 v1 i2 v2 Fig. 16 First we set i2 = 0 and analyse the circuit shown in Fig. 16. R1 R2 ~ i2 0 i1 v~1 R3 ~ v2 Fig. 17 As a result we obtain v~1 R1 R3 i1 , v~2 R3i1 . Thus, we have v~1 r11i1 , v~2 r21i1 , r11 R1 R3 , (18) r21 R3 . (19) Next we set i1 = 0 and analyse the circuit shown in Fig. 18. 10 ~ ~ i1 0 R1 R2 ~ ~ v1 R3 ~ ~ v2 i2 Fig. 18 As a result we obtain ~ v~1 R3i2 , ~ v~2 R2 R3 i2 . Thus, we have ~ v~1 r12 i2 , ~ v~2 r22 i2 , r12 R3 , (20) r22 R2 R3 . (21) According to the superposition theorem we write v1 r11i1 r12 i2 , v2 r21i1 r22 i2 . Since di L di1 L1 1 , dt dt di L di v2 L2 2 L2 2 , dt dt v1 L1 and i1 i L1 , i2 i L2 , we obtain after simple rearrangements the state equations diL1 dt r11 r i L1 12 i2 , L1 L1 diL2 (22) r r 21 iL1 22 i2 , dt L2 L2 where r11, r21, r12, r22 are given by (18) – (21). Capacitor–inductor configuration Circuits containing one capacitor, one inductor, linear resistors, linear controlled sources and independent sources can be presented in the form shown in Fig. 19. 11 i1 i2 iC1 vC1 C1 LRTP v1 L2 v2 vL2 L2 Fig. 19 We choose the capacitor voltage vC1 v1 and the inductor current iL2 i2 as state variables and write a system of two first-order differential equations C1 L2 dvC1 dt diL2 dt iC1 i1 , (23) v L2 v 2 , where i1 is the port current and v2 is the port voltage. To express i1 and v2 in terms of the state variables vC1 v1 and iL2 i2 we terminate the LRTP by voltage source v1 and current source i2 (see Fig. 20) and solve the circuit for i1 and v2. i1 v1 LRTP v2 i2 Fig. 20 To find i1 and v2 we apply the superposition theorem. First we consider the circuit driven by the voltage source v1 acting alone as shown in Fig. 21. ~ ~ i1 i2 0 v1 LRTP without independent sources Fig. 21 ~ In this circuit the current i1 and the voltage v~2 are given by the equations v~2 12 ~ i1 f11v1 , v~ f v , 2 (24) 21 1 where f11 and f21 are constants. Next we consider the circuit driven by the current source i2 acting alone (see Fig. 22) and ~ ~ ~ solve it for i and ~ v . 1 2 ~ ~ i1 LRTP without independent sources ~ ~ v2 i2 Fig. 22 As a result we find ~ ~ i1 f12 i2 , ~ v~ f i , 2 (25) 22 2 where f12, f22 are constants. Finally we set to zero v1 and i2 and consider the circuit driven by the independent sources inside the LRTP (see Fig. 23). We solve this circuit for iS1 and v S2 . iS1 LRTP vS 2 Fig. 23 According to the superposition theorem we write ~ ~ ~ i1 i~1 i1 iS1 f11v1 f12 i2 iS1 , ~ v2 v~2 ~ v2 v S2 f 21v1 f 22 i2 v S2 . Substituting the equations (23) in place of i1 and v2 yields (26) 13 dvC1 dt f11 f 1 vC1 12 iL2 iS1 , C1 C1 C1 (27) diL2 f f 1 21 vC1 22 i L2 v S2 , dt L2 L2 L2 where iS1 and v S2 are generally time-varying signals. Example 3 Consider the second-order circuit shown in Fig. 24. R1 i1 vC1 R2 C1 v1 i2 R3 vL2 v2 L2 L2 Fig. 24 To formulate state equations describing this circuit we take into account the linear resistive two-port consisting of R1, R2, R3 terminated by voltage source v1 and current source i2 as shown in Fig. 25 R1 R2 i1 v1 R3 i2 v2 Fig. 25 We solve this circuit for i1 and v2 using the superposition theorem. First we set i2 = 0 and analyse the circuit shown in Fig. 26. ~ i1 R1 R2 v1 ~ i2 0 v~2 R3 Fig. 26 As a result we obtain ~ i1 v1 f11v1 , R1 R3 ~ v~2 i1 R3 R3 v1 f 21v1 , R1 R3 f11 1 , R1 R3 f 21 R3 . R1 R3 (28) (29) 14 Next we set v1 = 0 and analyse the circuit shown in Fig. 27 ~ R1 i1 R2 ~ ~ v2 R3 i2 Fig. 27 In this circuit we find ~ ~ i1 i2 R3 f12 i2 , R3 R1 ~ RR v~2 i2 R2 1 3 f 22 i2 , R1 R3 f12 R3 , R3 R1 f 22 R2 R1 R3 . R1 R3 (30) (31) To write the state equations we substitute into (27) of f11, f21, f12, f22 given by the formulas (28)-(31) and iS1 0 , vS 2 0 .