Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Euler equations (fluid dynamics) wikipedia , lookup
Path integral formulation wikipedia , lookup
Classical mechanics wikipedia , lookup
Introduction to gauge theory wikipedia , lookup
Partial differential equation wikipedia , lookup
Lagrangian mechanics wikipedia , lookup
Navier–Stokes equations wikipedia , lookup
Magnetic field wikipedia , lookup
Work (physics) wikipedia , lookup
Neutron magnetic moment wikipedia , lookup
Field (physics) wikipedia , lookup
Superconductivity wikipedia , lookup
Maxwell's equations wikipedia , lookup
Electromagnetism wikipedia , lookup
Magnetic monopole wikipedia , lookup
Electromagnet wikipedia , lookup
Theoretical and experimental justification for the Schrödinger equation wikipedia , lookup
Relativistic quantum mechanics wikipedia , lookup
Aharonov–Bohm effect wikipedia , lookup
Lorentz force wikipedia , lookup
1
DRAFT
Particle motion in strong magnetic fields
Felix I. Parra
Rudolf Peierls Centre for Theoretical Physics, University of Oxford, Oxford OX1 3NP, UK
(This version is of 16 January 2017)
1. Introduction
This is the first lecture on magnetized plasmas. The behavior of plasmas in the presence
of strong magnetic fields is interesting because there are a great number of situations in
which the plasma is either confined by external magnetic fields (magnetic confinement
fusion, plasma thrusters...) or it generates its own strong magnetic field (plasma dynamos,
galaxy cluster plasmas...).
To understand the behavior of plasmas imbedded in strong magnetic fields, we first
study the motion of charged particles in strong magnetic fields. We start by solving the
simple problem of a particle in constant and uniform electromagnetic fields. We then use
what we learn from this simple problem to solve the more general problem in a useful
limit.
2. Constant and uniform E and B fields
We first solve the motion of a charged particle under the action of E and B fields that
do not depend on time and do not vary spatially. The equations of motion are
dr
=v
dt
(2.1)
and
dv
Ze
=
(E + v × B),
(2.2)
dt
m
where r and v are the position and velocity of the particle, Ze and m are the charge and
mass of the particle, and e is the proton charge.
The velocity v appears by itself in equation (2.2). Thus, we can use this equation to
solve for v(t) and then use (2.1) to find r(t). There are many different ways to solve
(2.2). We choose to solve it by using the unit vector in the direction of the magnetic
field, b̂ = B/B, to split the velocity into the component parallel to the magnetic field,
vk = v · b̂, and the components perpendicular to the magnetic field, v⊥ = v − vk b̂. The
component of (2.2) parallel to the magnetic field is
dvk
Ze
=
Ek ,
dt
m
(2.3)
where Ek = E · b̂. This equation can be directly integrated in time to give
vk (t) = vk0 +
Ze
Ek t,
m
(2.4)
where vk0 is the constant of integration.
The components of (2.2) perpendicular to the magnetic field are
dv⊥
Ze
− Ωv⊥ × b̂ =
E⊥ ,
dt
m
(2.5)
2
Felix I. Parra
b̂
ê02
'
ê2
'
ê01
ê1
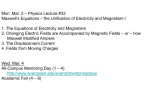
Figure 1. Local orthonormal basis {ê1 , ê2 , b̂} for the velocity. Note that the vectors ê1 and ê2
are defined up to a rotation. In the sketch we give two different possible basis, {ê1 , ê2 , b̂} and
{ê01 , ê02 , b̂}, rotated an angle ∆ϕ with respect to each other.
where Ω = ZeB/m is the gyrofrequency, and E⊥ = E − Ek b̂. This is an inhomogeneous
linear system of equations with constant coefficients that one can solve using the usual,
well-known techniques. With the relative velocity
w = v − vE ,
(2.6)
where
1
E × b̂
B
is known as E × B drift, we rewrite equation (2.5) as
vE =
dw⊥
− Ωw⊥ × b̂ = 0.
dt
This system of equations is linear and homogeneous. Its final solution is
(2.7)
(2.8)
w⊥ (t) = w⊥ [cos(Ωt + α) ê1 − sin(Ωt + α) ê2 ],
(2.9)
v⊥ (t) = vE + w⊥ [cos(Ωt + α) ê1 − sin(Ωt + α) ê2 ],
(2.10)
leading to
where w⊥ and α are constants of integration, and ê1 and ê2 are two unit vectors perpendicular to each other and perpendicular to b̂ that satisfy ê1 × ê2 = b̂ (see figure 1).
Combining (2.4) and (2.10), we obtain
Ze
v(t) = vk0 +
Ek t b̂ + vE + w⊥ [cos(Ωt + α) ê1 − sin(Ωt + α) ê2 ].
(2.11)
m
Integrating this equation in time once, we obtain the position,
Ze
r(t) = r0 + vk0 t +
Ek t2 b̂ + vE t + ρ[sin(Ωt + α) ê1 + cos(Ωt + α) ê2 ],
2m
(2.12)
where r0 is a constant of integration, and
ρ=
w⊥
Ω
(2.13)
is the gyroradius or Larmor radius.
The motion described by equations (2.11) and (2.12) is known as Larmor motion. The
particle can move freely along the magnetic field (it can be accelerated or decelerated
3
Particle motion in strong magnetic fields
B
Positiveion:
diamagnetic =current opposesB
Electron:
diamagnetic =current opposesB
vE
vE
E?
Small gyrationradius due
toenergy losttoE
Large gyration
radiusdue to
energy gained
fromE
Small gyrationradius due
toenergy losttoE
Large gyrationradius dueto
energy gained fromE
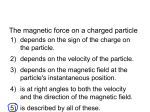
Figure 2. Sketch of the Larmor motion in the plane perpendicular to B. The magnetic field B
is pointing to the reader. The motion is diamagnetic because it produces a current that tends
to oppose the background magnetic field B. The E × B drift is the result of the particle gaining
kinetic energy in the region where ZeE · v > 0 and losing kinetic energy in the region where
ZeE·v < 0. The part of the orbit where the kinetic energy is high has a larger radius of gyration
than the part of the orbit with less kinetic energy.
by the parallel electric field), but its motion in the plane perpendicular to the magnetic
field is the composition of a constant drift, vE , and a circular motion. See Figure 2 for a
sketch of the motion in the perpendicular plane and a simple physical picture to explain
the E × B drift.
3. Magnetized particles in general electromagnetic fields
The Larmor motion is analytically solvable because E and B are assumed constant in
time and uniform in space. This solution can be extended to more general electromagnetic
fields that are approximately constant and uniform in the time and length scales of the
Larmor motion, Ω−1 and ρ. For a system of size L with a characteristic frequency
vt
(3.1)
ω∼ ,
L
where vt is the thermal speed of the particles, if the magnetic field is sufficiently strong,
then
ρ
mvt
ω
mω
ρ∗ = =
1,
=
∼ ρ∗ 1.
(3.2)
L
ZeBL
Ω
ZeB
Note that we have defined the useful small parameter ρ∗ 1. In the limit described by
(3.2), the particles must follow trajectories similar to the ones in equations (2.11) and
(2.12) because the particle does not see appreciable changes in the electromagnetic fields
in the characteristic time scales of its motion. We proceed to calculate the differences
between the Larmor motion in (2.11) and (2.12) and the motion of a particle satisfying
(3.2) in a general electromagnetic field.
Before starting the calculation, we need to order the electric field with respect to the
magnetic field. The electric field along the magnetic field must be such that it balances
the inertia of the particles in the plasma, that is, ZeEk ∼ mωvt ∼ mvt2 /L. This estimate
4
Felix I. Parra
gives
mvt2
.
(3.3)
ZeL
Conversely, the perpendicular magnetic field must be able to compete with the magnetic
force, giving
Ek ∼
1 mvt2
Ek .
(3.4)
ρ∗ ZeL
The perpendicular electric field can be much larger than the parallel electric field because in the directions perpendicular to the magnetic field, the strong magnetic field can
balance large forces. However, we must consider equation (3.4) as an upper limit for the
perpendicular electric field. In many applications, the perpendicular electric field is of
the order of Ek . Regarding the characteristic times and lengths of the electromagnetic
fields, we assume
E ⊥ ∼ vt B ∼
∇E ∼
E
,
L
∇B ∼
B
,
L
∂E
∼ ωE,
∂t
∂B
∼ ωB.
∂t
(3.5)
The equations that we need to solve are
dr
=v
dt
(3.6)
and
dv
Ze
=
[E(r, t) + v × B(r, t)] .
(3.7)
dt
m
Note that in these equations, unlike in (2.1) and (2.2), E and B depend on time and
space.
To solve equations (3.6) and (3.7) under the assumptions (3.2), (3.3), (3.4) and (3.5),
we first propose a set of coordinates to separate the two time scales of the problem, Ω−1
and ω −1 ∼ L/vt , to lowest order in ρ∗ . We then give the evolution equation for these new
coordinates, and we integrate them to lowest order in ρ∗ . This is the procedure developed
in (Parra & Catto 2008). There are other approaches to organize the calculation that
reach the same results (see, for example, Hazeltine & Meiss 2003; Goldston & Rutherford
1995; Cary & Brizard 2009).
3.1. New phase space coordinates
We use the Larmor motion in (2.11) and (2.12) to propose a new set of convenient phase
space coordinates.
The time evolution of the position of the particle is mostly dominated by the slow
time scale. Recalling that Ek and E⊥ are ordered as in (3.3) and (3.4), equation (2.12)
becomes
!
Ze
2
r(t) = r0 + vk0 t +
Ek t b̂ + vE t + ρ[sin(Ωt + α) ê1 + cos(Ωt + α)ê2 ] . (3.8)
|{z}
|{z} |
{z
}
|{z} |2m{z }
∼L
∼vt t
∼vt2 t2 /L
∼vt t
∼ρ∗ LL
These estimates show that only a small piece of order ρ∗ L L changes appreciably in
the fast time scale Ω−1 L/vt , and that it takes a time t ∼ L/vt for the particle to move
a distance L. Thus, we assume that r(t) is mostly dominated by the slow time scale, and
we use r = (x, y, z) as the spatial coordinates for our equations.
5
Particle motion in strong magnetic fields
For the velocity, equation (2.11) gives
!
Ze
Ek t b̂ + vE + w⊥ [cos(Ωt + α) ê1 − sin(Ωt + α) ê2 ] .
v(t) = vk0 +
|{z} |
{z
}
|{z} |m{z }
∼vt
∼vt
∼vt2 t/L
(3.9)
∼vt
The velocity has two different time scales. On the one hand, we have the fast gyration
with a characteristic time scale Ω−1 (see the cosine and sine terms). On the other hand,
it takes a time of the order of L/vt Ω−1 for the parallel velocity to change by an
amount of order vt . The fast time scale appears inside cosines and sines. For this reason
it is convenient to describe it using a phase ϕ(t) ∼ Ωt that we call gyrophase. In (2.11),
we will replace
Ωt + α → ϕ(t).
(3.10)
We expect the parallel velocity vk (t) and the perpendicular velocity w⊥ (t) to change in
the slow time scale L/vt . In (2.12), we will replace
vk0 +
Ze
Ek t → vk (t)
m
(3.11)
and
w⊥ → w⊥ (t).
(3.12)
v(t) = vk (t)b̂(r(t), t) + vE (r(t), t) + w⊥ (t) ê⊥ (r(t), ϕ(t), t),
{z
}
|
{z
} | {z } |
(3.13)
Using the substitutions (3.10), (3.11) and (3.12) in (2.11), we find the desired form for
v(t),
∼vt
∼vt
∼vt
where we have made it explicit that many terms depend on the particle position because
E and B are not uniform in space. We have also defined the useful function
ê⊥ (r, ϕ, t) = cos ϕ ê1 (r, t) − sin ϕ ê2 (r, t).
(3.14)
The vectors ê1 (r, t) and ê2 (r, t) are defined as for the Larmor motion, that is, they form
a local, right-handed, orthonormal basis with b̂(r, t) at every position r and every time t
(see figure 1). The plane formed by the vectors ê1 and ê2 is well defined (it is the plane
perpendicular to b̂), but the vectors themselves are only defined up to a rotation within
this plane, as shown in figure 1. Obviously, this arbitrary rotation of the basis that we
choose to describe the motion will not affect the motion of the particle, as we will see to
lowest order in ρ∗ 1.
Since we want to determine the functions vk (t), w⊥ (t) and ϕ(t), it will be convenient
to write them as functions of v and r, quantities for which we know the time evolution
equations (see (3.6) and (3.7)). Using the relative velocity w in (2.6), we can invert
relation (3.13) to find
vk = w · b̂(r, t),
q
w⊥ = w2 − [w · b̂(r, t)]2 ,
w · ê2 (r, t)
ϕ = − arctan
.
w · ê1 (r, t)
(3.15)
(3.16)
(3.17)
Note that the end result is that we have changed from the phase space coordinates
X = (X1 , X2 , X3 , X4 , X5 , X6 ) = (r, v)
(3.18)
6
Felix I. Parra
to the new phase space coordinates
Q = (Q1 , Q2 , Q3 , Q4 , Q5 , Q6 ) = (r, vk , w⊥ , ϕ).
(3.19)
3.2. Evolution equations for {r, vk , w⊥ , ϕ}
We proceed to calculate the evolution equations
dQ
= Q̇(Q, t).
dt
(3.20)
Note the distinction between
dQ
=
dt
dr dvk dw⊥ dϕ
,
,
,
dt dt dt dt
,
(3.21)
and
Q̇ = (ṙ, v̇k , ẇ⊥ , ϕ̇) :
(3.22)
the set of differential equations (3.20) can be written as dQ/dt = f (Q), where dQ/dt is
the time derivative of the vector Q, and Q̇ is the function f (Q).
To find the time derivative of any of the new phase space coordinates, we use the
transformations Qi (r, v, t) for i = 1, 2, 3, 4, 5, 6, given by (3.15), (3.16) and (3.17). Differentiating with respect to time and using the chain rule, we find
dQi
∂Qi
dr
dv
=
+
· ∇Qi +
· ∇v Qi .
dt
∂t
dt
dt
(3.23)
Using (3.6) and (3.7), this equation becomes
Q̇i =
∂Qi
Ze
(E + v × B) · ∇v Qi .
+ v · ∇Qi +
| {z } |m
∂t
|{z}
{z
}
∼Qi vt /L
∼Qi vt /L
(3.24)
∼Qi Ω∼Qi ρ−1
∗ vt /L
This expression gives Q̇i as a function of X = (r, v). With the expression v(vk , w⊥ , ϕ)
in (3.13), we get Q̇i as a function of Q = (r, vk , w⊥ , ϕ).
The relations Qi (r, v, t) in (3.15), (3.16) and (3.17) are more easily written using the
relative velocity w in (2.6). As an intermediate step to calculate Q̇i for i = 1, 2, 3, 4, 5, 6,
we first rewrite equation (3.24) using w instead of v. The partial time derivative in (3.24)
is taken holding r and v fixed. Thus, using the chain rule
∂Qi ∂Qi ∂w ∂Qi ∂vE
=
+
· ∇w Qi |r,t =
−
· ∇w Qi |r,t .
(3.25)
∂t r,v
∂t r,w
∂t r,v
∂t r,w
∂t
Similarly,
∇Qi |v,t = ∇Qi |w,t + ∇w|v,t · ∇w Qi |r,t = ∇Qi |w,t − ∇vE · ∇w Qi |r,t
(3.26)
and
∇v Qi |r,t = ∇v w|r,t · ∇w Qi |r,t = ∇w Qi |r,t .
(3.27)
Substituting equations (3.25), (3.26) and (3.27) into (3.24), and realizing that
E + vE × B = Ek b̂,
(3.28)
Particle motion in strong magnetic fields
7
we obtain
∂Qi
+ (w + vE ) · ∇Qi
Q̇i = Ω(w × b̂) · ∇w Qi +
|
|
{z
}
{z
}
∂t
|{z}
−1
∼Q v /L
∼Qi ρ∗ vt /L
+
i t
∼Qi vt /L
Ze
∂vE
Ek b̂ −
− (w + vE ) · ∇vE · ∇w Qi .
m
∂t
|
{z
}
(3.29)
∼Qi vt /L
Applying (3.29) to {r, vk , w⊥ , ϕ}, and after several vector manipulations (see Appendix A), we obtain
ṙ = vk b̂ + vE + w⊥ ê⊥ = O(vt ),
(3.30)
!
Zs e
∂ b̂
2
+ (vk b̂ + vE ) · ∇b̂ · ê⊥ + w⊥
ê⊥ · ∇b̂ · ê⊥ +
Ek
∂t
ms
2
∂vE
vt
+ (vk b̂ + vE ) · ∇vE · b̂ − w⊥ ê⊥ · ∇vE · b̂ = O
−
,
∂t
L
∂
+ (vk b̂ + vE ) · ∇ (vk b̂ + vE ) · ê⊥
ẇ⊥ = −
∂t
2
vt
− w⊥ ê⊥ · ∇(vk b̂ + vE ) · ê⊥ = O
,
L
∂ê1
+ (vk b̂ + vE ) · ∇ê1 · ê2 + w⊥ ê⊥ · ∇ê1 · ê2
ϕ̇ = Ω +
∂t
1
∂
+ (vk b̂ + vE ) · ∇ (vk b̂ + vE ) · (b̂ × ê⊥ )
+
w⊥
∂t
v t
+ ê⊥ · ∇(vk b̂ + vE ) · (b̂ × ê⊥ ) = Ω + O
.
L
v̇k = w⊥
(3.31)
(3.32)
(3.33)
The particular form of ṙ, v̇k , ẇ⊥ and ϕ̇ is not relevant to understand the expansion in
ρ∗ . There are two important points to emphasize:
• To lowest order, our choice of phase space coordinates has separated the slow and
fast time scales. The coordinate ϕ is the only coordinate with a very large time derivative,
of order Ω. Hence it is the only coordinate that changes an amount of order unity in the
fast time scale Ω−1 .
• However, the time scale separation is not completely successful. The gyrophase ϕ
appears in sines and cosines inside the function ê⊥ (r, ϕ, t). This is a crucial observation
because it means that even though the gyrophase ϕ is the only coordinate that changes
by order unity in the fast time scale, the other coordinates, r, vk and w⊥ , have small
oscillations with frequency Ω due to the sines and cosines of ϕ appearing in (3.30), (3.31)
and (3.32). It is desirable to separate those oscillations. We do so to lowest order in ρ∗
in the next subsection.
3.3. Integrating the motion to lowest order in ρ∗
We need to integrate equations (3.20),
Z t
Qi (t) =
Q̇i (Q(t0 ), t0 ) dt0 .
(3.34)
8
Felix I. Parra
To perform this integral to lowest order in ρ∗ , we define the gyroaverage of a function f ,
Z 2π
1
hf iϕ =
f (r, vk , w⊥ , ϕ, t) dϕ,
(3.35)
2π 0
as the average over a period of ϕ holding r, vk , w⊥ and t fixed. With this average, we split
the function Q̇i into a gyrophase independent piece, hQ̇i iϕ , and a gyrophase dependent
piece,
ė = Q̇ − hQ̇ i .
Q
(3.36)
i
i
i ϕ
With this separation, equation (3.34) becomes
Z t
ei .
Qi (t) =
hQ̇i iϕ (r(t0 ), vk (t0 ), w⊥ (t0 ), t0 ) dt0 + Q
(3.37)
where
Z
e i (t) =
Q
t
ė (r(t0 ), v (t0 ), w (t0 ), ϕ(t0 ), t0 ) dt0 .
Q
⊥
k
i
(3.38)
e i (t) can be taken to lowest order using the fact that its time derivative
The integral Q
can be written as
ei
e
e
e
ei
e
∂Q
dQ
e i + v̇k ∂ Qi + ẇ⊥ ∂ Qi + ϕ̇ ∂ Qi = Ω ∂ Qi + O vt Q
ei .
=
+ ṙ · ∇Q
(3.39)
dt
∂t
∂vk
∂w⊥
∂ϕ
∂ϕ
L
Then, equation (3.38) becomes
ei
ei
∂Q
ė (r, v , w , ϕ, t) = dQ
Q
'Ω
,
⊥
k
i
dt
∂ϕ
(3.40)
giving
e i (t) '
Q
1
Ω(r(t), t)
Z
ϕ(t)
ė (r(t), v (t), w (t), ϕ0 , t) dϕ0 = O(ρ Q ) Q .
Q
⊥
∗ i
i
k
i
(3.41)
ė averages to almost
e i . The highly oscillatory time derivative Q
Note the small size of Q
i
zero, giving a small contribution to Qi (t). As an example we calculate the small correction
to the position r̃. Equation (3.41) for r gives
Z
Z
Z
1 ϕ ė 0
1 ϕ
1 ϕ
r̃ '
r(ϕ ) dϕ0 =
w⊥ ê⊥ (ϕ0 ) dϕ0 =
w⊥ (cos ϕ0 ê1 − sin ϕ0 ê2 ) dϕ0
Ω
Ω
Ω
w⊥
w⊥
(sin ϕ ê1 + cos ϕ ê2 ) =
b̂ × ê⊥ = O(ρ∗ L).
(3.42)
=
Ω
Ω
The integral r̃ represents the Larmor gyration. To see this, compare this term to the
term proportional to ρ in (2.12).
Using the estimate in (3.41), equation (3.37) becomes to lowest order
Z t
Qi (t) =
hQ̇i iϕ (r(t0 ), vk (t0 ), w⊥ (t0 ), t0 ) dt0 + O(ρ∗ Qi ).
(3.43)
Ignoring the corrections small in ρ∗ , it is tempting to write equation (3.43) as
dQi
' hQ̇i iϕ .
(3.44)
dt
This expression is correct in the sense that once integrated in time, it gives the value
of Qi up to a correction small in ρ∗ . However, it is obvious that (3.44) is different to
Particle motion in strong magnetic fields
9
the lowest order expression dQi /dt = Q̇i . The reason for this difference is that the small
e i , of order ρ∗ (see (3.41)), has a large time derivative that competes with the
correction Q
slow time derivative of the largest piece of Qi . For example, the oscillation in position
given in (3.42) has instantaneous velocities of order vt , but its average velocity is almost
zero, contributing a very small piece to the total displacement r. We will use (3.44) even
if it is not correct for time scales of order Ω−1 . For times of order L/vt , the integral of
(3.44) will give the correct values.
Using (3.30), (3.31) and (3.32), ∇·B = 0 and Faraday’s induction law ∇×E = −∂B/∂t
(see Appendix B), equation (3.44) gives
dr
' hṙiϕ = vk b̂ + vE ,
dt
!
dvk
w2
Ze
1
db̂
· E − ⊥ b̂ · ∇B,
' hv̇k iϕ =
b̂ + b̂ ×
dt
m
Ω
dt
2B
dw⊥
w⊥ dB
' hẇ⊥ iϕ =
,
dt
2B dt
(3.45)
(3.46)
(3.47)
where
db̂
∂ b̂ dr
∂ b̂
=
+
· ∇b̂ '
+ (vk b̂ + vE ) · ∇b̂
dt
∂t
dt
∂t
(3.48)
and
dB
∂B
dr
∂B
=
+
· ∇B '
+ (vk b̂ + vE ) · ∇B.
(3.49)
dt
∂t
dt
∂t
We do not need to consider dϕ/dt because it does not appear in equations (3.45), (3.46)
and (3.47).
4. Summary: guiding center equations
The set of differential equations (3.45), (3.46) and (3.47) determines the average position of the particle, its average parallel velocity and its average perpendicular velocity.
These equations ignore the fast oscillations that happen at time scales of order Ω−1 . The
position r is in fact the guiding center position and not the particle position. Keeping
the correction (3.42),
Z t
w⊥ (t)
b̂(r(t), t)×ê⊥ (r(t), ϕ(t), t), (4.1)
r(t) '
[vk (t0 )b̂(r(t0 ), t0 )+vE (r(t0 ), t0 )]dt0 +
Ω(r(t), t)
we see that equation (3.45) gives the motion of the center around which the particle gyrates. Similarly, vk and w⊥ are the average values around which we have small oscillations
of order ρ∗ .
The gyrophase ϕ(t) does not enter in the guiding center motion. Once r(t), vk (t) and
w⊥ (t) are known, we can calculate the gyrophase using
dϕ
= Ω(r(t), t) + O(vt /L).
dt
(4.2)
To find ϕ accurately, we need the terms of ϕ̇ of order vt /L in (3.33). These corrections
of order vt /L give a change in the gyrophase of order unity in a time of order L/vt .
Equations (3.45), (3.46) and (3.47) give the position of the guiding center accurately for
times of order L/vt . These equations are missing terms small by a factor of ρ∗ 1. The
ė ⊥ only average to zero to lowest order. They contribute to the
oscillatory rates ė
r, ė
v k and w
10
Felix I. Parra
B
Positiveion
Inductive E due
to increasing B
Figure 3. Inductive electric field due to dB/dt > 0 that accelerates the gyration of a positive
ion and increases w⊥ . In this sketch, B is pointing to the the reader. Electrons are accelerated
by dB/dt > 0 as well.
particle motion a non-zero correction of order ρ∗ . These missing terms will lead to order
unity corrections after times of order ρ−1
∗ L/vt . These corrections can be obtained from
very tedious calculations. To minimize the number of such calculations in this course, we
will talk about these terms in the next lecture, when we will need them to describe the
statistics of magnetized plasmas.
There are other forms of the guiding center equations that prove useful. In particular,
it is common to replace w⊥ by another convenient variable. According to (3.47), the
velocity of the gyration changes in time when B changes. The reason for this is the
inductive electric field created by the time varying magnetic field (see figure 3). The
effect of this inductive electric field is to keep constant the magnetic moment
µ=
2
w⊥
.
2B(r, t)
(4.3)
Using (3.47), we find that its time derivative is
dµ
w⊥ dw⊥
w2 dB
=
− ⊥2
' 0.
dt
B dt
2B dt
(4.4)
The magnetic moment µ is then approximately constant in time. Physically, the magnetic
moment is proportional to the magnetic flux through the gyromotion. The area of the
2
2
circle enclosed by the gyromotion is Ag = πρ2 = πw⊥
/Ω2 = (πm2 /Z 2 e2 )(w⊥
/B 2 ).
Thus, the total magnetic flux through the area enclosed by the gyromotion is Ag B =
(2πm2 /Z 2 e2 )µ. Note that the magnetic moment is not a constant of the motion, but
an adiabatic invariant (see, for example, Landau & Lifshitz 1976, for a discussion of
adiabatic invariants). One of the consequences of µ being an adiabatic invariant is that
dµ/dt = 0 to all orders in ρ∗ . The time derivative dµ/dt is not exactly zero, but it is
exponentially small
v3
dµ
∼ t exp(−ρ−1
∗ ).
dt
BL
This is basically zero in most cases (ρ∗ = 0.1 gives a change in µ small by 10−5 ).
(4.5)
11
Particle motion in strong magnetic fields
Using the magnetic moment, the equations for the guiding center motion become
dr
' vk b̂ + vE ,
dt
!
dvk
Ze
1
db̂
· E − µb̂ · ∇B.
'
b̂ + b̂ ×
dt
m
Ω
dt
(4.6)
(4.7)
We finish by giving some examples of guiding center motion.
4.1. Motion with small E⊥ : low flow regime
So far, we have considered that the perpendicular electric field E⊥ is as large as we have
ordered it in (3.4), making the E × B drift of order the thermal speed vt . This is known
as the high flow regime. There are cases in which the perpendicular electric field is much
smaller, of order
mvt2
E⊥ ∼
.
(4.8)
ZeL
In this regime, the E×B drift is of order ρ∗ vti . This is the low flow regime or drift ordering.
When vE ∼ ρ∗ vti , the guiding center equations (4.6) and (4.7) become to lowest order
dr
' vk b̂,
dt
dvk
Ze
'
Ek − µb̂ · ∇B.
dt
m
(4.9)
(4.10)
Thus, the particle only moves along the magnetic field line (note that it does not separate
from it even if the magnetic field lines curve). The parallel velocity can be accelerated
or decelerated by the parallel electric field and unexpectedly by the magnetic field. The
magnetic field does not exert a force parallel to itself, but the direction of the magnetic
field changes slightly with the position of the particle in its gyration around the guiding
center, and the direction of the magnetic field at the particle position is different from
the direction of the magnetic field at the guiding center. When b̂ · ∇B 6= 0, the magnetic
field lines have to converge or diverge due to ∇ · B = 0. This divergence or convergence
causes the parallel acceleration −µb̂ · ∇B of the guiding center, as shown in figure 4.
This parallel acceleration causes what is known as magnetic bottling.
To explain magnetic bottling, we consider a steady state plasma. In steady state,
the electric field is well described by an electrostatic potential φ, E = −∇φ. With an
electrostatic magnetic field, the total energy
E=
1
mv 2 + mµB(r) + Zeφ(r)
2 k
(4.11)
is conserved. Indeed, using E = −∇φ, (4.9) and (4.10), we find
dvk
dE
dr
dr
= mvk
+ mµ · ∇B + Ze · ∇φ ' 0.
dt
dt
dt
dt
(4.12)
Equation (4.9) implies that the motion is along the magnetic field line. Then, limiting
ourselves to a magnetic field line, and using the length along the line l as a coordinate,
we obtain the equation of motion
r
dl
2
= vk = ±
[E − mµB(l) − Zeφ(l)],
(4.13)
dt
m
where we have used equation (4.11) to solve for vk as a function of the constants E and µ.
12
Felix I. Parra
b̂ · rB > 0
F = Zew? ⇥ B
w?
Magnetic
field lines
Netparallel
force
F = Zew? ⇥ B
w?
Positiveion
gyromotion seen
fromthe side
Figure 4. Net parallel force due to the magnetic force Zew⊥ × B due to a converging
magnetic field.
B
l
Figure 5. Sketch of B along a magnetic field line. Particles with E/mµ smaller than the
maximum in B(l) will have a bounce point.
The particle motion is controlled by the effective potential mµB(l)+Zeφ(l). If E and µ are
such that E > mµB(l) + Zeφ(l) for all l, the particle moves uninterruptedly in the same
direction it started. Conversely, if there is a location l0 in which E = mµB(l0 ) + Zeφ(l0 ),
the particle will stop and bounce at l0 . In figure 5, we consider a situation in which
φ(l) = 0 and the magnetic field magnitude has a shape that leads to bounces for certain
particles. Since φ(l) = 0, the bounce points are determined by B(l0 ) = E/mµ.
4.2. Motion with large E⊥ : high flow regime
In the high flow regime, we have to use equations (4.6) and (4.7). Particles move off
magnetic field lines due to the large E × B drifts. The parallel velocity is not only
affected by the magnetic bottling force and the parallel electric field. There is an extra
term,
!
db̂
Ze
b̂ ×
· E.
(4.14)
mΩ
dt
Particle motion in strong magnetic fields
13
z
✓
r
E = Ez ẑ
ˆ
B = B✓ ✓
Figure 6. Cylindrical configuration with azimuthal magnetic field Bθ and axial electric field
Ez .
This force came from the parallel component of the time derivative of the E × B drift,
!
Ze
db̂
dvE
b̂ ×
·E=−
· b̂
(4.15)
mΩ
dt
dt
The acceleration that results from a change of direction of the E × B is a consequence of
a combination of electromagnetic forces and a change in the momentum of the particle
in the direction parallel to the magnetic field. This term represents the change in parallel
momentum.
To show the importance of the term in (4.14), we study the simple cylindrical configuration in figure 6. The system is azimuthally symmetric. There is an azimuthal magnetic
field B = Bθ θ̂ and an axial electric field E = Ez ẑ. In the cylindrical coordinates {r, θ, z},
equation (4.6) becomes
dr
Ez
=− ,
dt
Bθ
vk
dθ
= ,
dt
r
dz
= 0,
dt
(4.16)
(4.17)
(4.18)
that is, guiding centers rotate azimuthally due to their parallel velocity, and move radially
inwards due to the E × B drift. Equation (4.7) gives
i
dvk
Ez vk h
Ze
dr
=
b̂ ×
· ∇b̂ · E =
θ̂ × (θ̂ · ∇θ̂) · ẑ.
(4.19)
dt
mΩ
dt
Bθ
Since θ̂ · ∇θ̂ = −r̂/r, we finally obtain
dvk
Ez vk
vk dr
=
=−
,
dt
rBθ
r dt
(4.20)
where we have used (4.16). Using equation (4.20), we can show that the azimuthal angular
momentum rvk is conserved,
dvk
d
dr
(rvk ) = r
+ vk
= 0.
dt
dt
dt
(4.21)
14
Felix I. Parra
Thus, as particles move radially inwards due to the E × B drift, their parallel velocity
accelerates because vk ∝ 1/r.
REFERENCES
Cary, J.R. & Brizard, A.J. 2009 Hamiltonian theory of guiding-center motion. Rev. Mod.
Phys. 81, 693.
Goldston, R.J. & Rutherford, P.H. 1995 Introduction to Plasma Physics. CRC Press.
Hazeltine, R.D. & Meiss, J.D. 2003 Plasma Confinement. Dover Publications.
Landau, L.D. & Lifshitz, E.M. 1976 Mechanics. Course of Theoretical Physics. Volume 1 .
Butterworth-Heinemann.
Parra, F.I. & Catto, P.J. 2008 Limitations of gyrokinetics on transport time scales. Plasma
Phys. Control. Fusion 50, 065014.
15
Particle motion in strong magnetic fields
Appendix A. Derivation of ṙ, v̇k , ẇ⊥ and ϕ̇
In this appendix we show how to derive equations (3.30), (3.31), (3.32) and (3.33).
Applying the operator in (3.29) to r, we obtain
ṙ = w + vE
(A 1)
Using (3.13), we rewrite this equation in the coordinates Q = (r, vk , w⊥ , ϕ), obtaining
(3.30).
Applying the operator in (3.29) to vk , we find
"
∂vk Ze
+ (w + vE ) · ∇vk |w,t + Ω(w × b̂) +
Ek b̂
v̇k =
∂t r,w
m
#
∂vE
−
− (w + vE ) · ∇vE · ∇w vk |r,t .
(A 2)
∂t
To derive (3.31) from (A 2), we obtain the partial derivatives of vk from its definition in
(3.15),
∂vk ∂ b̂
∂ b̂
=
· w = w⊥
· ê⊥ ,
(A 3)
∂t r,w
∂t
∂t
∇vk |w,t = ∇b̂ · w = w⊥ ∇b̂ · ê⊥ ,
(A 4)
∇w vk |r,t = b̂.
(A 5)
and
To obtain the final expressions for ∂vk /∂t and ∇vk we have differentiated b̂ · b̂ = 1 with
respect to time and space to find (∂ b̂/∂t) · b̂ = 0 = ∇b̂ · b̂. Substituting (A 3), (A 4) and
(A 5) into (A 2), we obtain (3.31).
Applying the operator in (3.29) to w⊥ , we obtain
"
∂w⊥ Ze
ẇ⊥ =
Ek b̂
+ (w + vE ) · ∇w⊥ |w,t + Ω(w × b̂) +
∂t r,w
m
#
∂vE
−
− (w + vE ) · ∇vE · ∇w w⊥ |r,t .
(A 6)
∂t
To derive (3.32) from (A 6), we calculate the partial derivatives of w⊥ from its definition
in (3.16),
vk ∂ b̂
∂ b̂
∂w⊥ =−
· w = −vk
· ê⊥ ,
(A 7)
∂t r,w
w⊥ ∂t
∂t
∇w⊥ |w,t = −
and
vk
∇b̂ · w = −vk ∇b̂ · ê⊥ ,
w⊥
(A 8)
w⊥
= ê⊥ .
w⊥
(A 9)
∇w w⊥ |r,t =
Substituting (A 7), (A 8) and (A 9) into (A 6), we obtain (3.32).
16
Felix I. Parra
Applying the operator in (3.29) to ϕ, we find
"
Zs e
∂ϕ + (w + vE ) · ∇ϕ|w,t + Ωs (w × b̂) +
Ek b̂
ϕ̇ =
∂t r,w
ms
#
∂vE
−
− (w + vE ) · ∇vE · ∇w ϕ|r,t .
∂t
(A 10)
Finally, to obtain (3.33) from (A 10), we need the partial derivatives of ϕ. We start with
the derivative with respect to time,
1
∂ê2
∂ê1
∂ϕ =−
(w · ê1 )
· w − (w · ê2 )
· w . (A 11)
∂t r,w
(w · ê1 )2 + (w · ê2 )2
∂t
∂t
We then use the relation between the coordinates w and the coordinates {wk , µ, ϕ}, given
in (3.13), to write
∂ê2
∂ê1
∂ϕ 2
2
=
−
cos
ϕ
·
ê
−
sin
ϕ
·
ê
1
2
∂t r,w
∂t
∂t
∂ê2
∂ê1
+ sin ϕ cos ϕ
· ê2 −
· ê1
∂t
∂t
vk
∂ê1
∂ê2
· b̂ + sin ϕ
· b̂ .
(A 12)
−
cos ϕ
w⊥
∂t
∂t
Differentiating the expressions ê1 · ê1 = 1 = ê2 · ê2 and ê1 · ê2 = 0 = ê1 · b̂ = ê2 · b̂ with
respect to time, we obtain (∂ê1 /∂t)·ê1 = 0 = (∂ê2 /∂t)·ê2 , (∂ê2 /∂t)·ê1 = −(∂ê1 /∂t)·ê2 ,
(∂ê1 /∂t) · b̂ = −(∂ b̂/∂t) · ê1 and (∂ê2 /∂t) · b̂ = −(∂ b̂/∂t) · ê2 . Using these identities in
(A 12), we obtain
vk ∂ b̂
∂ê1
∂ϕ =
· ê2 +
· (sin ϕ ê1 + cos ϕ ê2 ) .
(A 13)
∂t r,w
∂t
w⊥ ∂t
Using the function ê⊥ in (3.14), we can rewrite this expression as
vk ∂ b̂
∂ϕ ∂ê1
=
· ê2 +
· (b̂ × ê⊥ ).
∂t r,w
∂t
w⊥ ∂t
Treating ∇ϕ in the same way as ∂ϕ/∂t, we obtain
vk
∇ϕ|w,t = ∇ê1 · ê2 +
∇b̂ · (b̂ × ê⊥ ).
w⊥
(A 14)
(A 15)
Finally, the derivative with respect to w of ϕ gives
∇w ϕ|r,t = −
(w · ê1
)2
1
1
[(w · ê1 )ê2 − (w · ê2 )ê1 ] =
(ê⊥ × b̂).
2
+ (w · ê2 )
w⊥
(A 16)
Substituting (A 14), (A 15) and (A 16) into (A 10), we obtain (3.33).
Appendix B. Derivation of dr/dt, dvk /dt and dw⊥ /dt
In this appendix, we derive equations (3.45), (3.46) and (3.47).
From equation (3.30), it is obvious that
hṙiϕ = vk b̂ + vE
(B 1)
17
Particle motion in strong magnetic fields
because ê⊥ , defined in (3.14), satisfies hê⊥ iϕ = 0.
From equation (3.31), we find
∂vE
Zs e
2
Ek −
+ (vk b̂ + vE ) · ∇vE · b̂.
hv̇k iϕ = w⊥
hê⊥ ê⊥ iϕ : ∇b̂ +
ms
∂t
(B 2)
In Einstein’s index notation, the double contraction of any two matrices M and N is
M : N = Mij Nji .
(B 3)
We need the average hê⊥ ê⊥ iϕ . Using (3.14), we find
ê⊥ ê⊥ = cos2 ϕ ê1 ê1 − sin ϕ cos ϕ(ê1 ê2 + ê2 ê1 ) + sin2 ϕ ê2 ê2 .
In the orthonormal basis {ê1 , ê2 , b̂}, this tensor becomes the
cos2 ϕ
− sin ϕ cos ϕ
ê⊥ ê⊥ =
− sin ϕ cos ϕ
sin2 ϕ
0
0
matrix
0
0 .
0
(B 4)
(B 5)
Taking the gyroaverage, we obtain
1
1
1
hê⊥ ê⊥ iϕ = (ê1 ê1 + ê2 ê2 ) = 0
2
2
0
0
1
0
0
0 .
0
(B 6)
Since the unit matrix I can be written as I = ê1 ê1 + ê2 ê2 + b̂b̂, we finally get
hê⊥ ê⊥ iϕ =
1
(I − b̂b̂).
2
Using (B 7) and employing I : ∇b̂ = ∇ · b̂, equation (B 2) becomes
w2
Zs e
∂vE
hv̇k iϕ = ⊥ ∇ · b̂ +
+ (vk b̂ + vE ) · ∇vE · b̂.
Ek −
2
ms
∂t
(B 7)
(B 8)
We can simplify this equation further by using ∇ · B = 0 to write
B∇ · b̂ = −b̂ · ∇B.
We can also integrate by parts the last term in (B 8) and use vE · b̂ = 0 to find
"
!#
∂ b̂
1
∂vE
+ (vk b̂ + vE ) · ∇vE · b̂ =
b̂ ×
+ (vk b̂ + vE ) · ∇b̂
· E.
−
∂t
B
∂t
Using (B 9) and (B 10) in (B 8), we obtain
"
!#
Zs e
1
∂ b̂
w2
hv̇k iϕ =
b̂ +
b̂ ×
+ (vk b̂ + vE ) · ∇b̂
· E − ⊥ b̂ · ∇B.
ms
Ωs
∂t
2B
(B 9)
(B 10)
(B 11)
Finally, from (3.32), we obtain
hẇ⊥ iϕ = −vk w⊥ hê⊥ ê⊥ iϕ : ∇b̂ − w⊥ hê⊥ ê⊥ iϕ : ∇vE .
(B 12)
Using (B 7), I : ∇b̂ = ∇ · b̂ and I : ∇vE = ∇ · vE , equation (B 12) becomes
vk w ⊥
w⊥
hẇ⊥ iϕ = −
∇ · b̂ −
(∇ · vE − b̂ · ∇vE · b̂).
(B 13)
2
2
To simplify this equation, we use the fact that the orderings (3.3) and (3.4) imply
E + vE × B = Ek b̂ ' 0.
(B 14)
18
Felix I. Parra
Taking the curl of this equation, we obtain
∇ × E + ∇ × (vE × B) ' 0.
(B 15)
Using Faraday’s induction law ∇ × E = −∂B/∂t, and
∇ × (vE × B) = B · ∇vE − (∇ · vE )B − vE · ∇B,
(B 16)
equation (B 15) becomes
B · ∇vE − (∇ · vE )B '
∂B
+ vE · ∇B.
∂t
(B 17)
Projecting this equation on b̂, and using (∂B/∂t) · b̂ = ∂B/∂t and ∇B · b̂ = ∇B, we
finally get
1 ∂B
+ vE · ∇B .
(B 18)
b̂ · ∇vE · b̂ − ∇ · vE '
B ∂t
Using this expression and (B 9) in (B 13), we obtain
w⊥ ∂B
(B 19)
+ (vk b̂ + vE ) · ∇B .
hẇ⊥ iϕ =
2
∂t
Equations (B 1), (B 11) and (B 19) give equations (3.45), (3.46) and (3.47).