Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Specific impulse wikipedia , lookup
Theoretical and experimental justification for the Schrödinger equation wikipedia , lookup
Old quantum theory wikipedia , lookup
Fictitious force wikipedia , lookup
Jerk (physics) wikipedia , lookup
Center of mass wikipedia , lookup
Classical mechanics wikipedia , lookup
Hooke's law wikipedia , lookup
Optical heterodyne detection wikipedia , lookup
Brownian motion wikipedia , lookup
Mass versus weight wikipedia , lookup
Matter wave wikipedia , lookup
Newton's theorem of revolving orbits wikipedia , lookup
Relativistic mechanics wikipedia , lookup
Rigid body dynamics wikipedia , lookup
Hunting oscillation wikipedia , lookup
Equations of motion wikipedia , lookup
Newton's laws of motion wikipedia , lookup
Centripetal force wikipedia , lookup
Classical central-force problem wikipedia , lookup
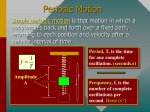
Simple Harmonic Motion (SHM) Harmonic motion is a type of motion in which an object moves along a repeating path over and over again. Examples: pendulum motion of a child on a swing; the motion of the Earth around the Sun. Force and energy are common to all forms of harmonic motion. The figure shows a person hanging from a spring acting like a bungee cord. The spring is the dominant force acting on the person; gravity also acts on the person. The figure below shows snapshots of the person as he oscillates up and down due to the force of the spring. The position of the person on the spring can be measured as a location on the vertical y-axis. The figure below shows a plot of y as a function of time where each point on the y-axis matches the physical location of the person on the spring. The person’s position varies in a repeating manner as he moves up and down. This is oscillatory motion. In the absence of friction and air resistance, the repeating motion would continue forever. Period T is the repeat time for the oscillatory motion; the time it takes for the man on the spring to travel through one complete cycle of the motion. Period can be measured from equilibrium point (1) to equilibrium point (5). Period can be measured from highest point (2) to highest point (6). Period can be measured between any two equal points on the y vs. t curve. Frequency f is the number of oscillations that occur in one unit of time. Frequency f is the number of cycles completed in one second. Since period is the number of seconds to perform one cycle, frequency and period are reciprocals of one another: 1 1 f and T T f Units: frequency f is in cycles/second, otherwise known as a hertz (Hz). Simple Harmonic Motion The key property of an oscillator is that its motion is periodic or repeating. Oscillatory motion is described as a sine wave: y = A·sin(2·π·f·t) For the man on the spring, y is the location along the vertical axis and the equation y = A·sin(2·π·f·t) tells us how y changes with time. Systems that oscillate in a sinusoidal manner are called simple harmonic oscillators. The frequency f tells us the rate at which the oscillator repeats its motion. The range of the oscillating motion depends on the quantity A, the amplitude of the motion. The man on the spring moves back and forth between the maximum and minimum values of y = ±A. The velocity of the man on the spring also changes with time and oscillates between positive and negative values with the same frequency f as the position y. The maximum values of the velocity do not happen when y has its maximum values: the largest values of v occur when y =0; The velocity v = 0 when y = ±A For the figure: One cycle (a period) is from (1) to (5) or from (2) to (6). The maximum positive value of y (maximum amplitude) occurs at (2) and (6); the minimum value of y (also the maximum amplitude) occurs at (4). The velocity v = 0 at these points. The maximum velocity v occurs at (1) and (3) and (5). The value of y = 0 at these points. Connection Between SHM and Circular Motion A CD spinning at a constant rate is an example of periodic motion. There is a close relationship between uniform circular motion and SHM if you follow a point on the edge of the CD. A particle at the edge of the CD moves at a constant speed vc as it moves around a circle of radius A. The particle’s position is marked by a reference line drawn on the CD. If is the angle between the reference line and the xaxis, then increases with time according to = ω·t, where ω is the angular velocity of the rotational motion. As the particle completes one full trip around the circle, varies from 0 rad to 2·π rad; this is one full period for the harmonic motion. 2 t T Solving for T: T 2 Harmonic motion can be described in terms of angular velocity ω or a frequency f: f 2 The frequency f is the number of cycles a system completes in 1 second. For a rotating object, the system completes an angular displacement of ω each second, so ω is called the angular frequency. SHM: Position as a Function of Time Let’s examine the circular motion and SHM in terms of the particles coordinates in the x-y plane. The y-component of the particle’s position is y = A·sin Since = ω·t: y A sin A sin t Using ω = 2·π· f: y A sin 2 f t The x-component of the particle: x A cos A cos t x A cos 2 f t Both equations describe SHM with the same period T 1 f The only difference between the two functions is a “shift” along the time axis. The sine function begins at y = 0 when t = 0. The cosine function begins at y = +A when t = 0. SHM: Velocity as a Function of Time While vc is constant, the y-component of the velocity vy is not constant. v y vc cos vc cos t v y vc cos 2 f t The particle travels once around the circle a distance of 2·π·A in a time period equal to one period, so: 2 A vc 2 f A T Substituting this into the vy equation: vy 2 f A cos 2 f t Vy is the velocity of the simple harmonic oscillator and is just called v. The position and velocity of a simple harmonic oscillator is: y A sin 2 f t v 2 f A cos 2 f t We can also use the x-component: x A cos 2 f t vc 2 f A v x vc sin v x 2 f A sin 2 f t The only difference between the x and y components of the simple harmonic oscillator is in how the oscillator is initially set into motion. Conditions for SHM Any system for which the acceleration varies with the negative of the displacement will exhibit SHM (College Board loves this!). The coefficient between a and x defines the square of the angular frequency 𝜔 2. a( x) x 2 x(t ) xm cos( t ) Descriptive features of SHM Although the causes of SHM will vary from one system to another, the sinusoidal variation is a common element. All solutions are directly characterized by three features: xm : maximum displacement amplitude (or amplitude) : angular frequency : phase constant (or phase angle) ϕ and ω can alternately be specified by either of the following: f : frequency, f = /2 measured in Hertz (1 Hz = 1 s-1) T : period, T = 1/f = 2/ Example of SHM: Mass on a Spring A mass m is attached to a spring with the opposite end of the spring attached to the wall; the block is free to move horizontally on a frictionless surface. Apply Newton’s second law to the mass. In the vertical direction, the forces acting on the block are gravity and the normal force exerted by the table. These two forces are equal in magnitude and opposite in direction and cancel (and are not shown in the figure). When stressed, there is a horizontal force exerted by the spring given by Hooke’s law: Fspring = k·x where x is the amount the spring is stretched or compressed from its relaxed (equilibrium) position. The spring constant k is a measure of the spring’s strength. The equilibrium position of the mass in the figure is at x = 0; when the mass is at that position, the spring is in its relaxed state and the force exerted by the spring on the mass is zero. When the mass is displaced to the right so that x > 0, the force exerted by the spring on the mass will be in the negative direction. If the mass is displaced to the left so x < 0, the spring force will be to the right. Fspring is called the restoring force because it always opposes the displacement away from the equilibrium position. Whenever there is a restoring force described by Fspring = k·x, the system will exhibit simple harmonic motion. College Board definition of SHM. Applying F = m·a, where F is the total force in the horizontal direction parallel to x: F = Fspring = k·x = m·a The frequency f for the mass1 k spring system is: f 2 m The frequency f increases as the spring constant k is increased and gets smaller as the mass m is increased. Frequency f does not depend on the amplitude A. Linear Restoring Forces and SHM Summary A linear restoring force tends to push a system back toward a point of stable equilibrium, with a magnitude that varies linearly with the displacement away from equilibrium. An example is Hooke’s law for an ideal spring F kx Applying Newton’s second law gives a second-order ordinary differential equation 2 d x k a x 2 dt m the solution of which is a sinusoidal variation of position in time x(t ) xm cos( t ) k ( ) m Any system with displacement following this form is said to be undergoing simple harmonic motion (SHM). x(t ) A cos( t ) 3 k 2 m T v = dx/dt v=0 at x = A |v| = max at x = 0 a = dv/dt |a| = max at x = A a =0 at x = 0 SHM Example: Mass on a Vertical Spring For the person suspended vertically from the spring in the figure, two forces act on the mass: The force from the spring; The force of gravity. The vertical oscillation frequency f is the same as the horizontal oscillation frequency: 1 k f 2 m SHM Example: The Pendulum Pendulums come in many forms: a kid on a playground swing; a mass tied to the end of a string; the pendulum in an old clock. The pendulum mass is also called the “bob”. Applying Newton’s 2nd law, the two forces acting on the mass are the upward tension in the string and the downward force of gravity. Air resistance is ignored. It is convenient to measure the bob’s displacement in terms of y, the displacement along the circular arc. When the pendulum is displaced from its equilibrium position, the resultant force Fparallel is parallel to the circular arc and is responsible for the simple harmonic motion. Fparallel is the restoring force in the pendulum. The bottom point on the trajectory (y = 0) is the equilibrium point of the pendulum; Fparallel = 0 at this point. If the bob is placed at this point and given no initial velocity, it will remain there motionless. As the pendulum oscillates, the bob moves back and forth past the equilibrium point and the magnitude and direction of Fparallel changes with time. When the bob is to the right where y > 0, Fparallel is directed to the left (in the negative direction). When the bob is to the left where y < 0, Fparallel is directed to the right (in the positive direction). Fparallel always opposes the bob’s displacement away from the equilibrium position (the restoring force). The restoring force is due to the component of the gravitational force directed along the bob’s path. For a pendulum of length L, with a mass m, the restoring force is: Frestoring Fparallel m g sin If the angle is small, the function sin is approximately equal to when the angle is measured in radians; sin = . The angle is also related to the displacement by y L For a small angle displacement (generally less than 15º): Frestoring Fparallel Applying Newton’s 2nd m g y m g L law: Fparallel m g y m a L To determine the frequency f, we can use the massspring equation by replacing the spring constant k with: m g L 1 k f 2 m 1 m g f 2 m L replacing k 1 g f 2 L The frequency of the pendulum is independent of the mass of the bob. You might have expected that a heavier bob would move more slowly and have a lower frequency than a lighter bob. The restoring force is due to gravity and is proportional to the bob’s mass; m·g·sin = m·a; the mass cancels; g·sin = a. The frequency is also independent of the amplitude of the motion. You might have expected the frequency to depend on the amplitude since if the amplitude is increased (by starting the pendulum farther from y = 0), the pendulum bob must travel over a greater distance. If the amplitude A is increased, the bob’s velocity at all points along the path is increased by the same amount because A enters into the results for y (displacement) and v (velocity) in the same way. Features Common to All Simple Harmonic Oscillators The motion of a simple harmonic oscillator exhibits a sinusoidal time dependence for position or velocity. y A sin 2 f t v 2 f A cos 2 f t x A cos 2 f t v x 2 f A sin 2 f t All simple harmonic oscillators involve a restoring force. For a horizontal mass on a spring, F is the force exerted by the spring on the mass. For a pendulum, f is the component of the gravitational force along the path of the pendulum bob. Both displacement and restoring force vary sinusoidally with time, and F always has a sign opposite that of the displacement. The magnitude of the restoring force is proportional to the displacement. The frequency of a simple harmonic oscillator is independent of the amplitude A and depends on either the length of a pendulum string or the mass and spring constant of the oscillating system. The amplitude is determined entirely by how the oscillator is set into motion. Harmonic Motion and Energy • For the mass-spring system, the mechanical energy of the system is the sum of the kinetic energy K (½·m·v²) and elastic potential energy Ue (½·k·x²). • For figure A and C: mass is at x = 0, so Ue = 0 because the spring is relaxed; the speed is maximum, so K is equal to the total energy. • For figure B and D: when x = ±A, the speed = 0, so K = 0; the mass has its maximum displacement, so Ue is equal to the total energy. • Energy oscillates between elastic potential and kinetic energy. • The energy oscillates back and forth between kinetic potential energies as shown. • An ideal oscillator has no friction so the total mechanical energy is conserved. • The sum of the kinetic and potential energy is constant; the maximum kinetic energy is equal to the maximum potential energy. 1 1 2 2 m vmax K max U max k A 2 2 Derivation of the Frequency for a Mass-Spring System Using Circular Motion Concepts X-components of the mass’s position and velocity: x A cos 2 f t vc 2 f A v x vc sin v x 2 f A sin 2 f t The centripetal acceleration of the particle is directed toward the center of the circle is: vc 2 ac A The simple harmonic motion is described by the particle’s position on the x-axis. The x-component of the acceleration is: vc 2 a ac cos cos A Substituting into the k·x = m·a equation: vc 2 k A cos m cos A m vc 2 k A A m 2 f A m vc k A A A 2 2 2 m 4 f A k A A 2 2 k 4 f m 2 Substituting vc = 2·π·f·A: 2 Solving for f: f 2 k 4 m 2 1 k f 2 m The frequency f increases as the spring constant k is increased and gets smaller as the mass m is increased. Frequency f does not depend on the amplitude A. For situations with two springs as shown: 1 2k f 2 m If there is no friction, an oscillator will oscillate forever. Most oscillators eventually come to rest as their vibrations decay with time. The friction in an oscillating system is referred to as damping. When a damped oscillator is given a nonzero displacement at t = 0 and released, it can exhibit three different types of behavior: (1) overdamped (2) critically damped (3) underdamped For a damped harmonic oscillator, such as a pendulum swinging in air, the displacement varies with time when the damping is weak due to a small amount of friction. The system still oscillates because the displacement alternates between positive and negative values, but the amplitude of the oscillation gradually decreases over time. After undergoing many oscillations, the damping eventually reduces the oscillations to zero. This is an example of an underdamped oscillation. An oscillator is said to be overdamped when friction is very large. The resulting displacement as a function of time is represented by curve 1 on the right. • Think of a pendulum mass swinging through a thick fluid rather than air; the mass swings very slowly back to the bottom. How to distinguish underdamped and overdamped oscillations? Underdamped – displaced mass always passes through zero at least once, usually many times, before the system comes to rest. Overdamped – displaced mass does not swing past the bottom, but moves to the equilibrium position without going beyond it. In critically damped oscillations, the displaced mass falls to zero as rapidly as possible without moving past the equilibrium position. Shock absorbers on cars: Essentially springs that support the car’s body and allow the tires to move up and down over bumps in the road without directly passing these vibrations to the car and passengers. When car hits a bump, shock absorber springs are compressed to the initial value of the displacement. Shocks are designed to be critically damped, which allows the body of the car to return to its original height as quickly as possible. Worn out (underdamped) shocks allow the car to oscillate up and down. • Overdamped shocks give the car a soft ride with poor steering and handling. A pendulum can be set into motion by pulling the pendulum bob to one side and letting go or by giving the pendulum bob an initial impulse. In many applications, an oscillator is given regular or continuous impulses. For example, pushing a kid on a swing. The oscillator is “driven” by the applied force. For example, the pendulum has an oscillation frequency of: f natural 1 g 2 L • If the driving force is not applied at the natural frequency, but with a period called Tdrive, we can define the driving frequency as: 1 f drive Tdrive • The amplitude of the oscillations depends on the driving frequency as shown. • If fdrive is not close to fnatural, the amplitude of the oscillation is small no matter how large a driving force is applied. • The amplitude is largest when the driving frequency is close to the natural frequency of the system, which is called resonance. • When the frequency of the driving force matches the natural frequency of an oscillator, the amplitude of the oscillation will be large. • Resonance curve is narrowest and tallest when damping is weakest. • Resonance curve is lower and wider as the damping is increased. • The peak of the resonance curve occurs at the resonant frequency. x a v m x = -A x=0 F m a k x x = +A k x a m Conservation of Energy: ½·m·vA2 + ½·k·xA 2 = ½·m·vB2 + ½·k·xB 2 1 2 mv k x k A 2 1 2 k v A2 x 2 m x A cos(2 f t ) 2 1 2 v0 2 k A m a 4 f x 2 2 v 2 f A sin(2 f t ) x a v m x = -A 1 f 2 x=0 a x 1 k f 2 m x = +A x T 2 a m T 2 k Condition for SHM Natural frequency [rad/s] Period Mass on a Spring Pendulum Small oscillations (spring obeys Hooke’s Law) Small angles (sinθ ≈ θ) k m m T 2 k g L T 2 L g