Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Elementary particle wikipedia , lookup
Symmetry in quantum mechanics wikipedia , lookup
Atomic theory wikipedia , lookup
Classical mechanics wikipedia , lookup
Equations of motion wikipedia , lookup
Fictitious force wikipedia , lookup
Seismometer wikipedia , lookup
Centrifugal force wikipedia , lookup
Quaternions and spatial rotation wikipedia , lookup
Relativistic mechanics wikipedia , lookup
Newton's theorem of revolving orbits wikipedia , lookup
Modified Newtonian dynamics wikipedia , lookup
Classical central-force problem wikipedia , lookup
Center of mass wikipedia , lookup
Work (physics) wikipedia , lookup
Centripetal force wikipedia , lookup
Rotational spectroscopy wikipedia , lookup
Newton's laws of motion wikipedia , lookup
Rigid body dynamics wikipedia , lookup
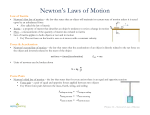
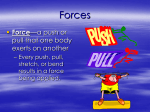
Rotational Motion Torque Moment of Inertia Lana Sheridan De Anza College Feb 29, 2015 Last time • rotation and kinematics • relating rotational and translational quantities • torque Overview • torque • moments of inertia Torque Torque is a measure of force-causing-rotation. It is not a force, but it is related. It depends on a force vector and its point of application relative to an axis of rotation. Torque is given by: τ=r×F That is: the cross product between • a vector r, the displacement of the point of application of the force from the axis of rotation, and • an the force vector F 10.4 Torqu The component F sin f tends to rotate the wrench about an axis through O. Torque F sin f S F r f O S d Figure 10.7 r F cos f f Line of action S The force F has a greater rotating tendency about an axis through O as F increases τ=r× F= rF sin φ and n̂ as the moment arm d increases. In our study of tra we studied the cau What is the cause Imagine trying ular to the door s hinges. You will ac force near the doo When a force is to rotate about th axis is measured b but we will consid Chapter 11. Consider the wr perpendicular to t where φ is the angle between r and F, and n̂ is the unit vector perpendicular to r and F, as determined by the right-hand rule. rom F1, which has a moment arm S F2 is negative and equal to 2F 2d 2. 1 to rotate the object counterclockwise about an axis through O, and S F 2 tends to rotate it clockwise. Example 10.3 - Net Torque on a Cylinder A one-piece cylinder is shaped as shown, with a core section protruding the larger drum. The cylinder is free to rotate es can cause a changefrom in translaw. Forcesabout can alsothe cause a change central z axis shown in the drawing. A rope wrapped e forces in causing this change around the drum, which has radius R1 , exerts a force T1 to the d the moment arms of the forces, right the cylinder. A rope wrapped around the core, which has ts of force timeson length—newton ed in these units.RDo confuse radius exerts a force T2 downward on the cylinder. 2 , not 2 F 2d 2 re very different concepts. What is the net torque acting on the cylinder about the rotation axis)? stubborn screw from a piece of axis (which is the the z d a screwdriver for which trying to loosen a stubborn il, should you find a wrench for y S T1 R1 inder 0.9, with a core section protrudrotate about the central z axis he drum, which has radius R 1, ope wrapped around the core, n the cylinder. R2 O x z S T2 Figure 10.9 (Example 10.3) A ed in these units. Do not confuse re very different concepts. Example 10.3 - Net Torque on a Cylinder stubborn screw from a piece of d a screwdriver for which the trying to loosen a stubborn il, should you find a wrench for y S T1 R1 inder R2 0.9, with a core section protrudrotate about the central z axis he drum, which has radius R 1, ope wrapped around the core, n the cylinder. bout the rotation axis (which is O x z S T2 Figure 10.9 (Example 10.3) A solid cylinder pivoted about the z axis S through O. The moment arm of T1 is S R 1, and the moment arm of T2 is R 2 . First: Find an expression for the net torque acting on the cylinder about the continued rotation axis. Second: Let T1 = 5.0 N, R1 = 1.0 m, T2 = 15 N, and R2 = 0.50 m. What is the net torque? Which way is the rotation? Rotational Version of Newton’s Second Law Tangential components of forces give rise to torques. They also cause tangential accelerations. Consider the tangential component of the net force, Fnet,t : Fnet,t = m at from Newton’s second law. τnet = r × Fnet = r Fnet,t n̂ Now let’s specifically consider the case of a single particle, mass m, at a fixed radius r . The tangential force on the 10.5 Analysis M in a torque onSecond the Rotational Versionparticle of results Newton’s Law particle about an axis through A single particle, massthem, at of a the fixed radius r . center circle. S ! Ft m S ! Fr r Figure 10.10 A particle rotating tangential net force g Ft . A radial S net force g Fr also must be present τ =circular rFnet,t n̂ net to maintain the motion. a circle of a For such a particle, in Fnet,t =under matthe influence S = r m at n̂ In Chapter 5, we learned t object and that the acceler basis of the particle unde is Newton’s second law. In second law: the angular ac proportional to the net to complex case of rigid-obje case of a particle moving i ence of an external force. Consider a particle of m of a tangential net force g The radial net force cause etal acceleration. The tang The magnitude of the net dicular to the page throug = r m (αr ) = (mr 2 ) α Because the tangential ac the relationship at 5 ra (E Rotational Version of Newton’s Second Law (mr 2 ) is just some constant for this particle and this axis of rotation. Let this constant be (scalar) I = mr 2 . Rotational Version of Newton’s Second Law (mr 2 ) is just some constant for this particle and this axis of rotation. Let this constant be (scalar) I = mr 2 . Scalar I is not impulse! This is just an unfortunate notation coincidence. Rotational Version of Newton’s Second Law (mr 2 ) is just some constant for this particle and this axis of rotation. Let this constant be (scalar) I = mr 2 . Scalar I is not impulse! This is just an unfortunate notation coincidence. I is called the moment of inertia of this system, for this particular axis of rotation. Rotational Version of Newton’s Second Law (mr 2 ) is just some constant for this particle and this axis of rotation. Let this constant be (scalar) I = mr 2 . Scalar I is not impulse! This is just an unfortunate notation coincidence. I is called the moment of inertia of this system, for this particular axis of rotation. Replacing the constant quantity in our expression for τnet : τnet = Iα Rotational Version of Newton’s Second Law Compare! τnet = Iα Fnet = ma Now the moment of inertia, I, stands in for the inertial mass, m. Rotational Version of Newton’s Second Law Compare! τnet = Iα Fnet = ma Now the moment of inertia, I, stands in for the inertial mass, m. The moment of inertia measures the rotational inertia of an object, just as mass is a measure of inertia. Moment of Inertia We just found that for a single particle, mass m, radius r , I = mr 2 However, this will not be the moment of inertia for an extended object with mass distributed over varying distances from the rotational axis. For that case, the torque on each individual mass mi will be: τi = mi ri2 α And we sum over these torques to get the net torque. So, for a collection of particles, masses mi at radiuses ri : X I= mi ri2 i Moment of Inertia And we sum over these torques to get the net torque. So, for a collection of particles, masses mi at radiuses ri : I= X mi ri2 i For a continuous distribution of mass, we must integrate over each small mass ∆m: Z I = r 2 dm Moment of Inertia For a continuous distribution of mass, we must integrate over each small mass ∆m: Z I = r 2 dm For an object of density ρ: Z I = ρ r 2 dV If ρ varies with position, it must stay inside the integral. Moment of Inertia Important caveat: Moment of inertia depends on the object’s mass, shape, and the axis of rotation. A single object will have different moments of inertia for different axes of rotation. Moment of Inertia Important caveat: Moment of inertia depends on the object’s mass, shape, and the axis of rotation. A single object will have different moments of inertia for different axes of rotation. Also notice that these integrals and sums are similar to the expression for the center-of-mass, but for I we have r 2 and we do not divide by the total mass. Units: kg m2 Moment of Inertia For a collection of particles, masses mi at radiuses ri : X I= mi ri2 i For a continuous distribution of mass, we must integrate over each small mass ∆m: Z I = r 2 dm And for an object of density ρ: Z I = ρ r 2 dV If ρ varies with position, it must stay inside the integral. Example: Calculating Moment of Inertia Calculate the moment of inertia of two equal point-like masses connected by a light rod, length `, rotating about the center of mass. m m l Example: Calculating Moment of Inertia Calculate the moment of inertia of two equal point-like masses connected by a light rod, length `, rotating about the center of mass. m m l Let the CM the origin. It will be in the center of the rod. Example: Calculating Moment of Inertia m m l Moment of inertia: I = X mi xi2 i 2 2 ` ` = m − +m 2 2 Example: Calculating Moment of Inertia m m l Moment of inertia: I = X mi xi2 i 2 2 ` ` = m − +m 2 2 = m`2 2 n. r5 m/V sometimes is referred to as Calculating Moment ofvolumetric Inertiamass ofdensity a Uniform Rod ass per unit volume. Often we use other ways of express10.7) , when (Example dealing with a sheet of uniform thickness t, we can ity s 5 rt, which represents mass per unit area. Finally, when Moment inertia of a uniform rod of length L and mass M a rod of uniformofcross-sectional area A, thin we sometimes use 0 axis) and passing about an axis perpendicular to the rod (the y /L 5 rA, which is the mass per unit length. through its center of mass. ngth L and mass M (Fig. and passing through its y y! dx! ure 10.15 (Example 10.7) niform rigid rod of length L. moment of inertia about the xis is less than that about the y . The latter axis is examined in mple 10.9. x! O x! L the definition of moment of inertia in Equation 10.20. As Calculating Moment of Inertia of a Uniform Rod Rod is uniform: let λ = M L be the mass per unit length (density). Z Iy 0 = r 2 dm Calculating Moment of Inertia of a Uniform Rod Rod is uniform: let λ = M L be the mass per unit length (density). Z Iy 0 = r 2 dm Z L/2 = −L/2 (x 0 )2 λ dx 0 Calculating Moment of Inertia of a Uniform Rod Rod is uniform: let λ = M L be the mass per unit length (density). Z Iy 0 = r 2 dm Z L/2 = (x 0 )2 λ dx 0 −L/2 L/2 (x 0 )3 = λ 3 −L/2 M L3 L3 = + L 24 24 = 1 ML2 12 Summary • applying kinematics • torque • moment of inertia Next test Friday, Mar 4. (Uncollected) Homework Serway & Jewett, • Read ahead in Chapter 10. • PREV: Ch 10, onward from page 288. Probs: 3, 7, 11, 15, 17, 19, 21, 25 • Ch 10, onward from page 288. Probs: 27, 29, 35, 39, 43