Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Path integral formulation wikipedia , lookup
Derivations of the Lorentz transformations wikipedia , lookup
Specific impulse wikipedia , lookup
Photon polarization wikipedia , lookup
Hunting oscillation wikipedia , lookup
Modified Newtonian dynamics wikipedia , lookup
Fictitious force wikipedia , lookup
Laplace–Runge–Lenz vector wikipedia , lookup
Analytical mechanics wikipedia , lookup
Lagrangian mechanics wikipedia , lookup
Relativistic quantum mechanics wikipedia , lookup
Newton's theorem of revolving orbits wikipedia , lookup
Jerk (physics) wikipedia , lookup
Seismometer wikipedia , lookup
N-body problem wikipedia , lookup
Theoretical and experimental justification for the Schrödinger equation wikipedia , lookup
Newton's laws of motion wikipedia , lookup
Computational electromagnetics wikipedia , lookup
Mass versus weight wikipedia , lookup
Center of mass wikipedia , lookup
Relativistic angular momentum wikipedia , lookup
Routhian mechanics wikipedia , lookup
Rigid body dynamics wikipedia , lookup
Relativistic mechanics wikipedia , lookup
Equations of motion wikipedia , lookup
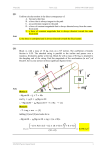
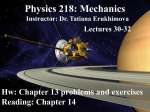
Physics H7A, Fall 2011 Homework 4 Solutions 1. (K&K Problem 2.11) A mass m is connected to a vertical revolving axle by two strings of length l, each making an angle of 45◦ with the axle, as shown. Both the axle and mass are revolving with angular velocity ω. Gravity is directed downward. (a) Draw a clear force diagram for m. (b) Find the tension in the upper string, Tup , and the lower string, Tlow . √ √ Ans. clue. If lω 2 = 2g, Tup = 2mg. (a) (Insert figure here.) (b) From the figure, we have X √ √ √ Fx = −Tup / 2 − Tlow / 2 = max = −mω 2 l/ 2, X √ √ Fy = Tup / 2 − Tlow / 2 − mg = may = 0. Solving these equations gives √ Tup = m(ω 2 l/2 + g/ 2), √ Tlow = m(ω 2 l/2 − g/ 2). 2. (K&K Problem 2.13) Masses M1 and M2 are connected to a system of strings and pulleys as shown. The strings are massless and inextensible, and the pulleys are massless and frictionless. Find the acceleration of M1 . Ans. clue. If M1 = M2 , ẍ1 = g/5. 1 After drawing free body diagrams for M1 , M2 , and the lower pulley, we obtain the equations T1 − M1 g = M1 a1 , T2 − M2 g = M2 a2 , T1 − 2T2 = 0. This provides three equations for four unknowns; the remaining equation comes from relating the accelerations of the two masses: a2 = 2apulley = −2a1 . Solving the four equations gives 2M2 − M1 a1 = g. M1 + 4M2 3. *(K&K Problem 2.34) A mass m whirls around on a string which passes through a ring, as shown. Neglect gravity. Initially the mass is distance r0 from the center and is revolving at angular velocity ω0 . The string is pulled with constant velocity V starting at t = 0 so that the radial distance to the mass decreases. Draw a force diagram and obtain a differential equation for ω. This equation is quite simple and can be solved either by inspection or by formal integration. Find (a) ω(t). Ans. clue. For V t = r0 /2, ω = 4ω0 (b) The force needed to pull the string. Hint: It might be convenient to use the expression for the acceleration vector a in polar coordinates, as on page 36 of K&K. In this context, ω(t) = θ̇(t). 2 The string is pulled downward with constant velocity V , so the radius of the mass must likewise decrease steadily at the rate ṙ = −V . Since r(0) = r0 , we have r(t) = r0 − V t. Since the only force acting on the mass is from the tension in the string (remember we’re neglecting gravity), we have F = −Tr̂ (the −r̂ is our way of saying that the force acts radially inward). Recalling the expression for the acceleration vector in polar coordinates, a = (r̈ − rθ̇2 )r̂ + (rθ̈ + 2ṙθ̇)θ̂, we see that F = ma implies the two equations −T = m(r̈ − rθ̇2 ), rθ̈ + 2ṙθ̇ = 0. The first equations tells us that the applied force must be T = rω 2 , while the second gives us a differential equation for ω: (r0 − V t) dω = 2V ω. dt This is a separable differential equation, which we can solve directly in just a few steps: dω 2V dt = ω r0 − V t Z ω(t) Z t dω 2V = dt ω 0 r0 − V t ω0 ω(t) r0 − V t ln = −2 ln ω0 r0 2 ω0 r0 ω(t) = (r0 − V t)2 The force pulling on the string must therefore be F (t) = mω(t)2 r(t) = mω02 r0 . (r0 − V t)3 As an aside, note that the equation rω̇ + 2ṙω = 0 is equivalent to d (ωr2 ) = 0. dt 3 Thus, it is satisfied if and only if ωr2 is constant, i.e. ω(t) ∝ r(t)−2 . This is a special case of the law of conservation of angular momentum: in the absence of tangential forces acting on an point mass (torques), the angular momentum L = mωr2 is conserved. 4. (K&K Problem 4.5) Mass m whirls on a frictionless table, held to circular motion by a string which passes through a hole in the table. The string is slowly pulled through the hole so that the radius of the circle changes from l1 to l2 . Show that the work done in pulling the string equals the increase in kinetic energy of the mass. Note: The previous problem should tell you that ω ∝ r−2 . This also follows directly from angular momentum conservation, which we will discuss later in the course. Since ω ∝ r−2 , we can say without loss of generality that ω = ω0 r02 r−2 for some values of ω0 and r0 . Since the speed of a rotating object is v = ωr = ω0 r02 r−1 , the change in kinetic energy of the mass is 1 1 K2 − K1 = m(v22 − v12 ) = mω02 r04 (l2−2 − l12 ). 2 2 From the previous problem, the force needed to pull the string at constant velocity is F = mω 2 r = mω02 r04 r−3 . The work done is therefore Z 2 Z l1 F · dr = W21 = 1 l2 1 mω02 r04 r−3 dr = mω02 r04 (l2−2 − l1−2 ) = K2 − K1 . 2 Notice that I swapped the integration limits in going from the second to the third expression above. Understanding the reason for this will prevent a lot of minus sign errors, R 2 and save you a lot of headaches. From a physicist’s perspective, the line integral W = 1 F·dr represents the following: we take our path from 1 to 2, break it up into a connected series of path elements dr, compute the dot product F · dr for each element, and sum the results. In this picture, it’s clear that if F · dr is positive for each path element, then W is obviously positive as well, since we just added up a bunch of positive numbers. However, R b for ordinary R a1-D integrals, mathematicians like to define things in such a way that a f (x)dx = − b f (x)dx, so that if a > b the integral of a positive function f (x) will come out negative. So to correct for this effect, when I express my line integral as an ordinary 1-D integral, I manually swap the integration limits so that my answer comes out positive. (An alternative and more robust approach is to use the formal procedure for evaluating line integrals, as explained in K&K pp. 167-168. This will always get you the right answer, but may take more lines of work.) 5. (K&K Problem 4.6) A small block slides from rest from the top of a frictionless sphere of radius R. How far below the top x does it lose contact with the sphere? The sphere does not move. Ans. R/3 4 Let θ represent the angular position of the block with respect to the vertical when it separates from the globe. From the figure, x = R(1 − cos θ). Since the block starts from rest (or very close to it), the kinetic energy it picks up is equal to the change in potential energy: 21 mv 2 = mgx = mgR(1 − cos θ). With a free body diagram, we see that the forces acting on the block in the radial direction are the normal force N (outward), and the a component mg cos θ of the gravitational force (inward). So long as the block is sliding along the surface of the sphere, the radial component of the acceleration must be v 2 /R inward (it will obviously have tangential acceleration, since it’s speeding up, but ar = −v / R still holds). Thus N − mg cos θ = −mv 2 /R = −2mg(1 − cos θ). At the point where the block separates from the sphere, the normal force vanishes (N = 0), which gives 2 −mg cos θ = −2mg(1 − cos θ) =⇒ cos θ = . 3 Hence x = R/3. 5