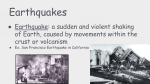
Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Casualties of the 2010 Haiti earthquake wikipedia , lookup
Kashiwazaki-Kariwa Nuclear Power Plant wikipedia , lookup
1908 Messina earthquake wikipedia , lookup
Seismic retrofit wikipedia , lookup
2011 Christchurch earthquake wikipedia , lookup
2010 Canterbury earthquake wikipedia , lookup
2008 Sichuan earthquake wikipedia , lookup
Earthquake engineering wikipedia , lookup
1992 Cape Mendocino earthquakes wikipedia , lookup
1880 Luzon earthquakes wikipedia , lookup
April 2015 Nepal earthquake wikipedia , lookup
2009–18 Oklahoma earthquake swarms wikipedia , lookup
1906 San Francisco earthquake wikipedia , lookup
Earthquake prediction wikipedia , lookup
Bulletinofthe SeismologicalSocietyofAmerica,Vol.70,No. 1, pp. 323-347,February1980
A SEMI-MARKOV MODEL FOR CHARACTERIZING RECURRENCE OF
GREAT EARTHQUAKES
BY ASHOK S. PATWARDHAN,RAM B. KULKARNI,AND DON TOCHER*
ABSTRACT
A semi-Markov model estimating the waiting times and magnitudes of large
earthquakes is proposed. The model defines a discrete-time, discrete-state
process in which successive state occupancies are governed by the transition
probabilities of the Markov process. The stay in any state is described by an
integer-valued random variable that depends on the presently occupied state
and the state to which the next transition is made. Basic parameters of the
model are the transition probabilities for successive states, the holding time
distribution, and the initial conditions (the magnitude of the most recent earthquake and the time elapsed since then).
The model was tested by examining compatibility with historical seismicity
data for large earthquakes in the circum-Pacific belt. The examination showed
reasonable agreement between the calculated and actual waiting times and
earthquake magnitudes. The proposed procedure provides a more consistent
model of the physical process of gradual accumulation of strain and its intermittent, nonuniform release through large earthquakes and can be applied in the
evaluation of seismic risk.
INTRODUCTION
The object of this paper is to describe an analytical mode] for characterizing the
recurrence of great earthquakes (defined as earthquakes of magnitude M = 7.8)
consistent with the general physical processes contributing to their occurrence.
Available historical seismicity data suggest that great earthquakes exhibit patterns
of nonrandomness in location, size, and time of occurrence (Mogi, 1968; Sykes, 1971;
Kelleher et al., 1974).
From a physical standpoint, the occurrence of great earthquakes can be represented by a continuous, gradual process of strain accumulation interrupted intermittently by episodes of sudden release. Several factors are believed to influence the
size of great earthquakes in a given area; for example, accumulated strain, shearing
resistance, slip rates, tectonic stress, and displacement over the interface area.
Recurrence characterization includes estimation of sizes of and holding times between successive great earthquakes at a given location. Because of the uncertainties
associated with the underlying physical processes, the characterization is probabilistic in nature.
Several statistical models have been proposed to represent the process of earthquake occurrence. The most common model is the Poisson model, which assumes
spatial and temporal independence of all earthquakes including great earthquakes;
i.e., the occurrence of one earthquake does not affect the likelihood of a similar
earthquake at the same location in the next unit of time. Other models such as
those proposed by Shlien and Toksoz {1970) and Esteva {1976) consider the
clustering of earthquakes in time. A few other probabilistic models have been used
to represent earthquake sequences as strain energy release mechanisms. Hagiwara
(1975) has proposed a Markov model to describe an earthquake mechanism simulated by a belt-conveyor model. A Weibull distribution is assumed by Rikitake
* Deceased, July 6, 1979. See "Memorial",p. 400, this issue.
323
39,4
ASHOK S. PATWARDHAN, RAM B. KULKARNI, AND DON TOCHER
(1975) for the ultimate strain of the Earth's crust to estimate the probability of
earthquake occurrences. Earthquake magnitudes, however, are not represented in
this model. Knopoff and Kagan {1977) have used a stochastic branching process
that considers a stationary rate of occurrence of main shocks and a distribution
function for the space-time location of foreshocks and aftershocks. These models
are useful in the broad context of predicting earthquake sequences over large
tectonic regions.
However, these models are not adequate to characterize the location-specific
occurrences of great earthquakes. While a Poisson process does provide estimates of
the probability of occurrence of great earthquakes of any size or the formation of a
seismic gap which may be characteristic of a whole region, the estimates are
independent of the size and time elapsed since the last great earthquake, invariant
in time, and insensitive to location. The physical model outlined above would
suggest, on the contrary, a dependence on at least two initial conditions--the size of
and the time elapsed since the last great earthquake. Since both of these conditions
will vary from location to location, the probability of occurrence of a great earthquake or continuation of a seismic gap can be expected to vary from location to
location even within the same seismic region.
A need exists, therefore, for establishing an analytical model that is more consistent with the underlying physical processes and that can characterize the recurrence
of great earthquakes on a more location-specific basis.
FORM OF THE SELECTED MODEL
In this paper, a semi-Markov process has been utilized, which can model the
spatial and temporal dependencies of great, main-sequence earthquakes. A semiMarkovian representation of earthquake sequences is consistent with the above
generalized hnderstanding of earthquake generation consisting of gradual, uniform
accumulation and periodic release of significant amounts of strain energy in the
Earth's crust. Since the buildup of strain energy sufficient to generate another great
earthquake would take some time, the occurrence of a great earthquake at the same
location is less likely within short periods of time following an earthquake of similar
size than within an area which has not experienced a similar earthquake for a long
time. As the time elapsed without the occurrence of another great earthquak~
increases, so does the probability of its occurrence. It is reasonable to assume that
both the size and waiting time to the next earthquake is influenced by the amount
of strain energy released in the previous earthquake (related to the magnitude of
that earthquake) and the length of time over which strain has been accumulating.
For instance, in the simple case of a uniform strain rate, the strain buildup required
to generate a magnitude 8.6 earthquake will take longer than the strain buildup to
generate a magnitude 7.8 earthquake. These considerations are well modeled by a
semi-Markovian representation of earthquake sequences.
A semi-Markov process has the basic Markovian property of one-step memory
(i.e., the probability that the next earthquake is of a given magnitude depends on
the magnitude of the previous earthquake). However, an additional feature of a
semi-Markov process is that it provides for the distribution of a holding time
between successive earthquakes, which depends on the magnitudes of the previous
and the next earthquake. Consideration of the holding time in effect provides a
multi-step memory for the semi-Markov process.
The following sections describe the development and application of the semiMarkov model.
A SEMI-MARKOV MODEL FOR RECURRENCE
OF GREAT EARTHQUAKES
325
D E V E L O P M E N T OF THE M O D E L
The theoretical development of a semi-Markov process is discussed in the literature (Howard, 1971). The model is described by two parameters, state, i, and holding
time, v. A state is defined by the magnitude of a great earthquake. The continuous
magnitude scale can be divided into appropriate intervals to specify discrete states
of the system. Figure 1 is a schematic representation of the semi-Markov process. It
shows the present conditions at a given location given by the magnitude of the last
great earthquake, Mo, and the time elapsed since its occurrence, to. In the next unit
of time, the system may either experience no great earthquake or make a transition
to any of the other discrete states, M~, M2, or 2143.The representation of earthquake
Q
G
Present
2
Time Units
Fro. 1. Schematic representation of the trajectory of a semi-Markov process.
occurrences by a semi-Markov process implies that the likelihood of the next great
earthquake being of a particular magnitude (i.e., transition to state j), depends on
the magnitude of the previous great earthquake {present state i). The holding time,
r, represents the time period for which the system holds in a given state, i. As
discussed by Howard (1971), the successive state occupancies (earthquake magnitude} will be governed by the transition probabilities of a Markov process, but the
stay in any state (holding time) will be described by an integer-valued random
variable that depends on the state presently occupied and on the state to which the
next transition will be made.
The formal model. Let pij be the probability that a semi-Markov process which
326
ASHOK S. P A T W A R D H A N , RAM B. K U L K A R N I , AND DON TOCHER
entered state i on its last transition will enter state j on its next transition. The
transition probabilities must satisfy the following properties
pij>=0
i=1,2,-..,N;
j=I,
2,...,N
(1)
and
N
j=l
P~i = i
(2)
where N is the total number of states in the system.
Whenever the process enters a state i, the likelihood t h a t it will go to state j at
some future time is determined by the transition probability Pii. However, after j
has been selected, but before making the transition from state i to state j , the
process "holds" for a time T~j in state i. The holding times ~ii are positive, integervalued random variables each governed by a probability mass function h~j (m) called
the holding time mass function for a transition from state i to state j. Thus,
P(~"ij = m) = hij(m)
m=
1, 2, 3 , . . .
i = 1,2, . . . , N
j=I,
2,...,N.
(3)
We assume t h a t a system entering a state i at time 0 will not make another transition
at time 0; i.e.,
hq(0) = 0.
(4)
After holding in state i for Tij, the process makes the transition to state j and then
immediately selects a new destination state k using the transition probabilities pj 1,
pj2, . . . , pjN. It next chooses a holding time Tjk in state j according to the probability
function hjh (m) and makes its transition at time ¢/k after entering statej. The process
continues developing its trajectory in this way indefinitely. A possible trajectory of
such a process is shown in Figure 1.
The time a semi-Markov process spends in state i given t h a t it enters i at time 0
without knowing the destination state is called the waiting time Ti in state i. Let
Wi(. ) be the probability mass function of ~i; i.e.,
N
Wi(m) = P(¢i = m) = Y~ Pij(m).
(5)
j=l
The cumulative distribution function (CDF) and complementary CDF of rij are
denoted by <-_hij(. ) and >hi j ( . ), respectively. The same functions of vi are denoted
by _-_Wi (.) and > Wi (.), respectively.
If the system has already spent some time (say, to) in a particular state (say, i), its
first transition out of state i will not be governed by the functions pij and hij (.).
These functions apply for a system which has just entered state i; t h e y do not apply
for a system which is observed in state i at the present time. Let the transition and
holding time probability functions for the first transition out of state i given t h a t it
A S E M I - M A R K O V MODEL FOR R E C U R R E N C E OF GREAT E A R T H Q U A K E S
327
has stayed in state i for the previous to time periods b epij1 and h ij1 (.), respectively.
By using Bayes' theorem, the following expression is found forp~i
p~j = P(transitions to j[i, to)
P(holding time at least to[i, j ) P { t r a n s i t i o n t o j I i)
iF, P(holding time at least to [ i, j ) P ( t r a n s i t i o n to j[ i)
-- >h~i (to)p~
(6)
j~ >hii(to)pij
An expression for h~j(. ) can be derived as follows
h}i(m) = P(holding time in i is m[ holding time in i
is at least to and the next transition is to j)
= P(z~j = m + to) = hij{m + to)
P(¢ij > to)
>hij(to).
(7)
A superscript I is used to distinguish the probability functions for the first transition
from those for the subsequent transitions; e.g., <h~j (.) is the CDF of holding time
for the first transition.
When to is equal to zero (i.e., the system has just entered state i), p~j and h}i (.)
become pij and hii(. ), respectively, as t h e y should.
The transition probabilities, the holding time probability distributions, and the
initial conditions {i.e., the most recent state of the system and time elapsed since
then) are the basic parameters of a semi-Markov process. These parameters can be
assessed from historical seismicity and geological data as well as experience and
judgments of experts.
The next step in the development of a semi-Markov process of earthquake
occurrences is to evaluate the probability distribution of the number of times the
process enters different states (different magnitude earthquakes) in a specified time
period.
Let wi (K1, K2, . . - , KN [n) be the probability t h a t a system which has just entered
state i will make K1 transitions to state 1, K2 transitions to state 2, • •., gN transitions
to state N in n time periods. We term this the joint probability distribution of state
occupancies. For a system which has been in state i for to time periods, the joint
probability distribution of state occupancies is d e n o t e d by a~il(K1, K2, . . . , KN[ n).
Expressions for ~i(. ) and ~i~(. ) are obtained below.
J o i n t probability distribution of state occupancies. To evaluate ~i(. ) and ~0i~(.),
we note t h a t the two sequences of events which lead to K~ transitions to state 1, K2
transitions to state 2, . . . , and KN transitions to state N through time n are: (a) the
first transition out of state i to a state j at time m and then K~ transitions to state
1, . . . , Kj - 1 transitions to state j, . . . , and KN transitions to state N in the
remaining time n - m, and (b) when K~ = K2 . . . . KN = 0, the first transition out
of state i after time n.
By summing the probabilities of these sequences of events over appropriate
destination states j and time periods m, we obtain
328
ASHOK S. PATWARDHAN, RAM B. KULKARNI, AND DON TOCHER
o~i(Kl, K2, "" ", KN I n)
N
n
= Y~ y~ p~ihij(m)o~j(K~,K2, . . . , K i - 1 ,
j=l
...,KNIn-m)
m=l
(8)
+ 6(Kz, K2, . . . , KN) > Wi(lt)
wil(K1, K2,
. ' . , KNI n)
N
= ~
j=l
n
1
1
¢.x)
~ pij(m)hij(m) ,j(K1, K2, . . . , K j -
1, . . . K i l n - m )
m=l
+ (~(K1,K2, . . . , KN) > Wil(n)
(9)
i=1,2,-.-,N
]=1,2,...,N
K1, K 2 , . . . , K N = 0 , 1 , 2 , . . . , n
n=0,1,2,
...
where: 6(K1, K2, .. -, KN) = 1, if K1 = K2 . . . . .
KN = 0, = 0 otherwise. Equations
(8) and (9) provide convenient recursive relationships for computing joint probabilities of state occupancies.
APPLICATION OF THE MODEL
The model described above can be applied to any area subject to great earthquakes. In this paper, the model was applied to extensive areas of the circum-Pacific
belt (see Figure 2) in which the primary process of occurrence of great earthquakes
is one of subduction and which have a fairly complete record of great earthquakes
dating back approximately 80 yr (in some areas such as Japan, it is longer). The
areas are extensive in length, within which differences exist in the characteristics of
relative place motions--rates and direction, size of interface areas, stress conditions,
size of rupture surfaces in individual events, etc.--that probably influence the
transition probabilities and holding times at different locations. To account for these
differences, the areas were subdivided into a number of subareas designated as A
through G in Figure 2. Each subarea was next subdivided into several smaller zones
in which a sequence of historical great earthquakes could be identified.
Great earthquakes are generally associated with rupture surfaces extending over
areas in the order of one thousand to tens of thousands of square kilometers
(Benioff, 1951; Tocher, 1958; Mogi, 1968; Kelleher et al., 1974; Patwardhan et al.,
1975). The size (length) of these rupture surfaces varies with earthquake magnitude,
but for a given magnitude they exhibit considerable scatter. It has been observed
that in many cases the rupture surfaces associated with historical great earthquakes
in the same general area show little overlap, and the rupture surfaces of subsequent
great earthquakes tend to fill the "gaps" or available spaces between previous great
earthquakes. In some other cases, the boundaries of the rupture surfaces coincide
with transverse geological structures. These observations provide a reasonable basis
for delineation of zones or spaces for the occurrence of the next set of great
earthquakes within a given area. It is not necessary to assume that these spaces are
"permanent" and that earthquakes of only up to the maximum historical size could
A SEMI-MARKOV
MODEL
FOR RECURRENCE
OF GREAT
329
EARTHQUAKES
recur in the future. It is possible that the rupture surface associated with the next
great earthquake will include the rupture surfaces of more than one previous great
earthquake. The probability of such an occurrence is not excluded in the model.
The rupture surfaces of the largest magnitude among the recent great earthquakes
were utilized to delineate each of the areas shown in Figure 2 into zones for which
calculation of transition probabilities and holding times are desired for a limited
period of interest (5 to 80 yr). The available history of rupture in each zone is
reviewed and used as part of the input data.
The delineation of zones was based on the locations and magnitudes of earthquakes given by USGS Hypocenter Data File {1977) and summarized in Table 1.
Where available, rupture lengths associated with individual great earthquakes were
identified based on aftershock zones. Only independent great earthquakes were
included, and clearly identifiable aftershocks were excluded. Where the rupture
-30
-6O
J
30
60
90
120
150
180
[
i
-150
l
l
J
-120
1
J
-90
i
i#~J
-60
i
J
I
-30
1
i
EXPLANATION
@
Tonga, Kermadec
@
Kurile, Kamchatka,
NE Honshu, Marianas
New Hebridies-New Guinea
@
Ryukyu, Philippines
( •South) America
(~
Alaska-Aleutians
(F~ Central America
FIG. 2. Areas of circum-Pacificbelt includedin the study.
surface dimensions could not be determined, average dimensions based on magnitude-length relationships based on aftershock zones were utilized to estimate the
size of a zone.
The data from the USGS Hypocenter Data File gives locations and magnitudes
of earthquakes. The magnitudes are given in different scales such as Richter
magnitudes, surface-wave magnitude, and body-wave magnitude. It is sometimes
difficult to assess the correctness of the magnitude and location of an individual
earthquake epicenter. Both parameters can influence the delineation of zones and
calculation of holding times. For some of the older great earthquakes, the threshold
of detection of small magnitudes may not have been low enough to permit a
delineation of the aftershock zones, and some great earthquakes do not appear to
have had identifiable aftershock zones. In such cases, it is difficult to establish the
extent of the rupture surface associated with that earthquake.
330
ASHOKS. PATWARDHAN, RAM B. KULKARNI, AND DON TOCI-IER
Since the primary object of this paper is to demonstrate the feasibility of applying
the semi-Markov model to the recurrence of great earthquakes and not to establish
specific parameters for a given area, possible inaccuracies in the delineation of zones
and calculation of holding times are not significant. When recurrence parameters
are to be established for a given area, appropriate data should be evaluated carefully
before the model is applied. The evaluation should be supplemented by a parametric
analysis to assess the significance of uncertainties in the data.
Considerable scatter exists in the estimated lengths of aftershock zones of earthquakes of a given magnitude (by a factor of 3 to 7; Patwardhan et al., 1975; Kelleher
and McCann, 1976). These differences may stem from a variety of reasons, including
the differences in (a) the width of the zone, (b), the effective stress drop, (c) the
average displacement, or (d) the effective shear modules. Some authors also suggest
that these differences are regional in nature (Kelleher and McCann, 1976) and an
upper limit to the length of the zone of faulting may exist for each area. Such
differences influence the delineation of boundaries of zones and the assessment of
holding times. The significance of the variable magnitude-rupture length relationships to the holding times and results of the semi-Markov model are discussed in
greater detail below.
TABLE 1
H I S T O R I C A L E A R T H Q U A K E S U S E D IN A N A L Y S E S
Area C
Area A
Serial No.
Date
Lat__2
_.
8erlal NO.
Long.
Da~e
Lat__u.
Lon~.
I
9-14-1959
28.678
177.71W
7.8
I
8-16-191[
7.00N
137.00E
8, t
2
5-i-1917
29.008
177.00W
8.6
2
9-I-1925
35.25N
139.50E
8.3
3
9-8-1948
21.008
174.00W
7.9
3
11-25-1953
33.90N
141.50E
8.3
4
2-9-1902
20. OOS
174.00W
7.8
4
3-13-1909
31.50N
142.50E
8.3
5
6-26-1917
15,50S
173.00W
8.7
5
7-5-1905
39,50N
142.50E
7.9
6
4-30-1919
19.008
172.50W
8.4
6
3-4-1952
42.50N
143.008
8,6
Area B
?
5-16-1968
40.84N
143.228
7.9
8
8-9-1901
40.00N
144.00E
7.9
9
8-9-1901
&O.00N
144.00E
8.3
10
3-2-1933
39.25N
144.50E
8,9
II
8-22-1902
18.00N
146.00E
8.1
1
11-2-1950
6.50S
129.508
8.1
12
12-25-19Q0
43.00N
146.008
7.8
2
2-1-1938
5.258
130.808
8.6
13
4-5-1901
45.00N
148.00E
7.9
3
1-15-1916
3.00S
135.50E
8.1
14
11-6-1958
44,38N
148.588
8.7
4
5-26-1914
2.008
137.008
7.9
15
11-8-1918
44.50N
151.50E
7.9
8
10-26-1926
3.258
138.50E
7.9
]6
9-7-1918
45.50N
151.50E
B.3
8
10-7-1900
4.005
140. OOE
7.8
17
5-I-1915
47.00N
155,008
8.1
7
9-20-1935
3.80S
141.75E
7.9
~8
6-25-1904
52.00N
159.008
8.3
8
9-14-1906
7.008
149.00E
8,4
19
6-25-1904
52.00N
159.008
8.1
9
1-24-1902
8.008
150.008
7.8
20
6-27-1904
52.00N
159.008
7.9
10
12-28-1945
6.008
150.008
7.8
2l
8-4-1959
82.50N
159.508
8,0
8.4
II
7-14-71
5.47S
153.898
7.g
22
11-4-1952
32.75N
159.508
12
5-6-1919
5.008
154.00E
8.1
23
2-3-1923
54.00N
161.00E
8.4
13
i-I-1916
4°008
154.008
7.9
24
1-30-1917
56.50N
163.008
8.1
14
1-30-1939
6.808
155.508
7.8
25
8-2-1907
52.0ON
173.00E
7.8
15
4-30-1939
10.505
158.508
8.1
26
7-14-1940
51.75N
177.508
7.8
27
8-17-1906
51,00N
179.008
8.3
16
10-3-1931
10,50S
161.75E
8.1
17
7-29-1900
lO.OOS
165.00~
8.1
18
11-9-1910
15.008
166.00E
7.9
19
7-18-1934
II.758
166.508
8.1
8.3
20
9-20-1920
20.OOS
168.00E
21
5-13-1903
17.0OS
168.00E
7.9
22
6-16-1910
19.008
169.50E
8.6
23
8-9-1901
22.009
170.00E
8.4
A SEMI-MARKOV MODEL FOR R E C U R R E N C E OF GREAT EARTHQUAKES
331
TABLE 1--Continued
Area D
Serial No.
Area F
Date
Lat__~.
Long.
~
Serial No.
Date
Lat~
Lon8 .
I
2-27-1903
8.00S
106.00E
8.1
1
12-12-1902
29.OON
II4.OOW
7.8
2
7-23-1943
9,50S
IIO,00E
8.1
2
I-'20-1900
20.OON
I05.00W
8.3
3
2-14-1934
17.50N
II9.00E
7.9
3
6-3-1932
19.50N
104.25W
8.1
4
5-19-1938
1.005
12.00E
7.9
4
6-7-1911
17.50N
I02.50W
7.9
5
4-8-1942
13.50N
121.OOE
7.8
5
4-15-1907
17. OON
IO0. OOW
8.3
6
1-24-1948
IO.50N
122.00E
8.3
6
7-28-1957
17.07N
99.15W
7.9
7
12-14-1901
14, OON
122.00E
2, 8
7
1-14-1903
15, OON
98.00W
8.3
8
6-5-1920
23.50N
122,80E
8,3
8
6-17-1928
16.25N
98.00W
7.9
9
1-22-1905
I.OON
123.00E
8,4
9
1-15-1931
16,08N
96.75W
7.9
i0
8-15-]918
5.50N
123.0QE
8,3
i0
9-23-1902
16.00N
93.00W
8.4
II
5-14-1932
O. 50N
126.00E
8.3
II
4-19-1902
14. O0N
91.O0W
S. 3
12
7-12-1911
9, OON
126.00E
7.8
12
8-6-1942
14. DON
91.00W
8.3
13
9-14-1913
4.5ON
126.50E
8.3
13
9-7-1915
14.08N
89.00W
7.9
14
4-14-1924
6.50N
126.50E
8.5
14
12-20~1904
8.50N
89.0OW
8.3
15
12-28-1903
7.00N
127.00E
7.8
15
1-31-1906
I. 0ON
81.50W
8.9
16
3-19-1952
9.50N
127.25E
7.9
16
6-21-1900
20.00N
80.00W
7.9
17
3-I-1948
3.008
127.50E
7.9
17
1-19-1958
1.37N
79.34W
7.8
18
8-30-1917
7.50S
128.00E
7.8
18
1-20-1904
7.00N
79.00W
7.9
19
5-25-1943
7.50N
128.00E
7.9
20
6-24-]901
27.00N
130.00E
7.9
21
8-24-1904
30. DON
13O*OOE
7.9
22
11-18-1941
32.00N
132.00E
7.9
23
24
6-2-1905
12-20-1946
34.00N
32.50N
132.00E
134.50E
7.9
8.4
25
3-7-1927
35.75N
134.75E
7.9
26
12-7-1944
33,75N
136,00E
8.3
Area E
Area G
I
I-7-1901
2.008
82.00W
7.8
2
5-14-1942
0.75S
81.50W
8.3
3
1-31-1906
1.00N
81.50W
8.9
4
!2-12-1953
3.40S
80.60W
7.8
5
1-19-1958
1.37N
79.34W
7.8
6
1-20-1904
7.00N
79.00W
7.9
7
5-24-1940
I0.50S
77.00W
8.4
8
8-24-1942
15,005
76.00W
8.8
|
2-14-I~05
53.00N
178.00W
7.9
9
5-22-1960
39.508
74.50W
8.5
2
12-31-1901
52.00N
177.00W
7.8
I0
8-6-1913
17.008
74.0~
7-9
3
3-9-1957
51.30N
175.80W
8.3
11
1-25-1939
36.25S
72.25W
8.3
4
3-7-1929
51.OON
170. OOW
8.6
12
12-I-1928
35. 009
79.00W
8.3
5
I-i-1902
55.00N
165.0OW
7.8
18
8-17-1906
33.008
72.00W
8.6
6
11-10-1938
55.5ON
158.00W
8.7
14
4-6-1943
30.758
72.00W
8.3
7
6-2-1903
57.00N
156.00W
8.3
15
5-20-1918
28.509
71.50W
7.9
8
8-27-1904
84.00N
151.00W
8.3
16
12-17-1949
54.00S
7~.OOW
7.8
9
3-28-1964
61.04N
147.73W
8.9
17
12-4-1918
26. O08
71. O0W
7,8
9-4-1899
60. OON
142,00W
8.3
18
8-2-1956
26.505
70.50W
7.9
II
10-9-1900
60. DON
142.00W
8.3
19
11-11-1922
28.308
70.00W
8.4
12
9-10-1899
60, DON
140.OOW
8.6
20
12-9-1950
~3.50S
67.50W
8.3
13
7-10-1958
58.6ON
137.10W
7.9
14
8-22-1949
53.75N
133.25W
:8.1
15
9-2-1907
52.08N
173.00E
7.8
16
7-14-1940
51.75N
177.50E
7.8
1O
The procedure of calculating probabilities of different magnitude earthquakes in
a given zone within a specific period of interest Y using a semi-Markov process
consists of the following steps
1. Define states and unit time for the semi-Markov process.
2. Define the initial seismicity condition of the zone in terms of the magnitude of
the last great earthquake (greater than 7.8) in the zone and the time elapsed
since then.
3. Assess the model parameters consisting of the transition probabilities pij and
probability distribution of holding times hii (.) on the basis of available historical seismicity and geological data and subjective assessments.
332
ASHOK
S. P A T W A R D H A N ,
RAM
B. KULKARNI,
AND
DON
TOCHER
4. Use equations (8) and (9) recursively to calculate the probabilities of K
earthquakes (K = 0, 1, 2, . . . ) of different magnitudes (M ~ 7.8) during the
time period Y.
T h e following paragraphs describe the procedure in each of the above steps.
Step 1--Defining states and unit time
T h r e e discrete states were defined for the occurrence of great earthquakes (M ->__
7.8)
State Index
Magnitude
1
2
3
8+0.2
8.4 ± 0.2
8.75 ± 0.15
A unit time for a semi-Markov process should be small enough so t h a t the probability
of two or more transitions (great earthquakes) is very low and large enough so t h a t
only a limited n u m b e r of transitions need to be studied during the selected period
of interest. Based on these considerations, a unit time of 5 yr was selected. Historical
TABLE
2
SUMMARY OF TRANSITION STATES USED IN ANALYSIS
Prior Fractiles (Mag}
Initial State M,
8 -t- 0.2
8.4 ___0.2
8.75 + 0.15
Posterior Fractiles (Mag)
SampLe Data (Mag)
8.7, 7.8, 8, 7.9, 8.4, 7.8, 8.3, 7.9, 7.9,
7.9, 7.9, 7.9, 8.3, 8.3, 7.9, 8.3, 7.9,
8.1, 8.3, 8.9, 8.1, 8.4, 7.8, 8.9, 7.8,
8.4, 7.9, 7.8
7.9, 8.3, 8.3, 8.3, 7.8, 7.9, 8.1, 8.6, 8.6,
7.9, 8,9, 8.9, 7.9, 8.3, 7.8, 8.4, 8, 7.8,
8.6, 7.9, 8.3, 8.3
8.4, 7.8, 8.3, 8.2, 8.3, 8.7, 8.6, 8.9, 8.3,
8.4
0.25
0,50
0.75
1,0
0.25
0.50
0.75
1.0
7.9
8
8.4
8.8
7.8
8
8.5
8.8
7.9
8
8.4
8.8
7.9
8
8.6
8.8
7.9
8
8.4
8.8
7.9
8.1
8.7
8.8
seismicity data suggest that this unit time is reasonable although shorter unit times
might be used in a few cases.
Step 2--Defining initial conditions of the system
T w o initial conditions need to be defined for each zone, the size of the last great
earthquake (Mo) and the time elapsed since its occurrence {to). B o t h conditions can
be established relatively easily for zones which have had at least one great earthquake in historical times, In such cases, known great earthquakes are arranged in a
chronological sequence, and the last e a r t h q u a k e in the sequence is identified as Mo.
Similarly, the time elapsed since the last great e a r t h q u a k e (to) is estimated from the
sequence. Values of Mo and to for all areas (excluding area B of Figure 2) are shown
in Tables 2 and 3, respectively. Area B exhibits p r e p o n d e r a n t recurrence of a specific
state (M = 8 ± 0.2). Therefore, sample data for Mo and to for area B were tabulated
separately in Tables 4 and 5. If a zone has not had any great earthquake during
historical times, it is not included in the present analysis. Zones t h a t have had only
one great e a r t h q u a k e in historical times are given in the last column of Tables 3 and
5 and, in general, include some of the longest seismic gaps.
A SEMI-MARKOV
,MODEL
FOR RECURRENCE
~ t "~
OF GREAT
~1
Z
<
z
N
<
~u
+I
~oc~
+I +I +I
~
+1
c~ c5 c5 c~ ,~
~-I +I ~-I ~ +I
~
•
+1
Q6
+1
o6
o6
EARTHQUAKES
333
334
ASHOK
S. P A T W A R D H A N ,
RAM
B. KULKARNI,
AND
DON
TOCHER
Step 3--Assessment of model parameters
Since the upper range of holding times between great earthquakes may be up to
a couple of hundred years, the historical seismicity data alone of about 80 yr are not
sufficient to provide reliable estimates of the parameters of a semi-Markov process,
namely, transition and holding time probability distributions. Therefore, a Bayesian
procedure which utilizes both historical seismicity data as well as subjective inputs
based on judgment in a formal statistical format was used. A schematic representation of the Bayesian procedure is shown in Figure 3. The main steps involved are:
(a) calculation of sample likelihood for historical seismicity data, (b) assessment of
prior distribution based on subjective inputs, and (c) calculation of posterior distribution by combining information from both sources.
(a) Calculation of sample likelihood. The sample likelihood is obtained from the
historical seismicity data assuming an appropriate probability distribution. For the
present model, two types of variables are involved: (1) the holding time, ~o, between
earthquakes of magnitudes corresponding to states i and j; and (2) the magnitude
of the earthquake, M,, following the earthquake of a magnitude corresponding to
state i. Since three discrete states of earthquake magnitudes have been defined, a
total of nine rij variables and three Mi variables are required in the analysis. A
lognormal probability distribution is assumed for ~ij and (M~ - 7.8). (Note that 7.8
is the smallest earthquake magnitude considered in the model.) The lognormal
TABLE 4
SUMMARY OF TRANSITION STATES FOR AREA B
Prior Fractiles (Mag)
Initial State M~
8 +_0.2
8.4 _ 0.2
8.75 +_.0.15
Posterior Fractiles (Mag)
Sample Data (Mag)
0.25
0.50
0.75
1.0
0.25
0.50
0.75
1.0
8.1, 7.9, 8.1, 8.1, 7.9, 8.1,
7.9
8
8.1
8.4
7.9
8
8.1
8.4
7.8, 7.9, 8.1, 7.9, 7.9,8.1
8.3
7.8
7.9
7.9
8
8
8.1
8.1
8.4
8.4
8
7.9
8
8
8.2
8.1
8.4
8.4
distribution has a range of 0 to oo and is skewed to the right. Both these properties
are reasonable for the variables under consideration.
The transition magnitudes and holding times obtained from analysis of the great
earthquakes in all areas shown in Figure 2 except area B are summarized as sample
data in Tables 2 and 3, respectively. All holding times were calculated to present
(1978).
(b) Assessment of prior distribution. For combining the data with the subjective
inputs in an analytically convenient manner, a conjugate prior distribution is often
assumed (Raiffa and Schlaifer, 1960). If the data are assumed normally distributed,
the appropriate conjugate prior distribution for the model parameters is the studentt. In order to calculate the prior parameters, the probability distribution function of
the corresponding variable (holding time, Tij, or earthquake magnitude, Mi) was
assessed using the fractile method discussed by Raiffa (1968).
The subjective assessments used as prior fractiles were developed based on the
trends indicated by the general physical model of earthquake generation. For all
initial states, the likelihood of the following state being M1 = 8 _ 0.2 was assumed
to be higher than the other two states, Mj = 8.4 +__0.2 or 8.75 _ 0.15. The transition
probabilities for different states decrease with increasing magnitude. The probability
of transition to state 1 (M = 8 ± 0.2) is relatively insensitive to the initial state, but
the distribution of transition probabilities is considered to be somewhat sensitive to
A SEMI-MARKOV
MODEL
FOR
RECURRENCE
OF GREAT
~D
c~
O
[.<
z
O
O
+1
÷1 ÷1 +1 +1 +1 ÷l +l ÷l
o6
+1
06
+1
06
0606
+1
06
EARTHQUAKES
335
336
ASHOK S. PATWARDHAN, RAM B. KULKARNI, AND DON TOCHER
the initial state (see Table 2). The holding times were considered to increase with
increasing magnitude but were also considered to be relatively less sensitive to the
initial state (see Table 3). The distributions of holding times for all areas were
assumed to be the same in all cases (Tables 3 and 5). However, in the case of area
B, the transition probabilities were considered to be high for state I and significantly
smaller for other states (see Table 4).
"SUBJECTIVE"INFORMATION
"OBJECTIVE"INFORMATION
Prior Information:
experience,judgement,
theoretical models
Data
I
Quantify information
~-~ and arrangein suitable
I statisticalformat.
I Analyzedata to obtain I
sample likelihood,
i<
COMBINEDSTATEOF KNOWLEDGE
r
]
I
I-I I
Combine information
from both sources
using Bayes'theorem.
I
I
Informationfrom
continuing research
I-I
I
J
FEEDBACKAND UPDATING
l
L,r
Iql -- "
ii
I
7
Information from
additional data
I
Obtain posterior
~timates.
FIG. 3. Schematic representation of Bayesian procedure.
(c) Calculation of posterior distribution. If the observations on a variable Y are
drawn from a normal distribution and a conjugate prior distribution is assessed for
the model parameters, the equations given in Raiffa and Schlaifer {1960) can be
used to obtain parameters of the posterior distribution.
Fractile values for posterior distributions of the state transitions and holding
times are given in Tables 2 and 3, respectively. Tables 4 and 5 give the prior and
posterior fractile values for transitions and holding times for area B, respectively.
Figure 4 depicts an example of the prior and prior distributions for holding times in
transition from state 1 (M = 8 ± 0.2) to state 2 (M = 8.4 ± 0.2) and state 3 (M = 8.75
± 0.15), respectively. For purposes of analysis, the continuous probability functions
on rij and Mi were discretized to obtain the model parameters.
A SEMI-MARKOV MODEL FOR RECURRENCE OF GREAT EARTHQUAKES
337
While establishing prior distributions, it is important to ensure that they are
based on independent sources of information and not intuitively based on recorded
data. To minimize the possibility of significant influence of data, the assessments
leading to the prior distributions utilize a considerably broader data base including
physical processes of earthquakes generation, plate tectonics, geological data, and
interpretations of slip and deformation rates on various earthquake sources.
CALCULATION OF RESULTS
The primary result obtained from the model is the set of probabilities of occurrences of different magnitude earthquakes in a given zone during a specified period
of interest. Equations 8 and 9 are used recursively to calculate the probability of K1
earthquakes of magnitude 8 (+0.2), K2 earthquakes of magnitude 8.4 (+0.2), and K~
earthquakes of magnitude 8.75 (+0.15). The probabilities are location and time
Mj ~ 8 ± 0.2
Mj = 8.75 ± 0.15
M i = 8.4 ± 0.2
D
1.0
~
~ll
V O.S
"/' •
o~=°~
-~
1.(
OJ
'
~llll
-
~
o.,
I
0.4
-
~w.
/
-
1.0
-
0.8
0.6--
I
0,4
!
o.,
i//
r~ /
iI
i
~0.2
O.
0
I
0
0.2
/'
20
40
60
Time t (yearsJ
80
C
20
40
80
Time t (years)
80
20
40
60
80
Time t (years)
100
120
M i = 8 ±0.2
.......
Prior distribution
Posterior distribution
FIG. 4. Example of prior and posterior probability distributions for holding times used in analysis.
specific; i.e., they are dependent on the initial conditions of the zone and are
applicable for the duration of real time. For example, if a period of interest of 40 yr
is specified, the probabilities apply to the next 40 yr, rather than to any 40-yr period.
Table 6 shows an example of the results for a zone with initial conditions of M0
= 8 and to = 5 yr. The probabilities of occurrences of different combinations of
earthquake magnitudes during the next 40 yr are shown. For example, the probability
that no great earthquake (Ms >=7.8) will occur in the next 40 yr is 0.19, while the
probability of occurrence of exactly one 8.4 (+_0.2) magnitude earthquake is 0.056.
The holding time and transition probabilities used in obtaining these results are
based on the assumption of a constant magnitude-rupture length relationship for all
the areas included in the analysis (data shown in Tables 2 through 5).
The basic output of the semi-Markov model (i.e., the probabilities such as those
shown in Table 6) provide one of the inputs necessary for seismic risk calculation at
a given location.
UTILIZATION OF RESULTS
The set of probabilities of different magnitudes of great earthquakes within a
given time period yielded by this model can be readily applied for a number of
purposes. The model is particularly helpful in characterization of a N ( M ) relationship, in the magnitude range where the Poisson model has difficulty due to lack of
338
ASHOK S. PATWARDHAN, RAM B. KULKARNI, AND DON TOCHER
s u f f i c i e n t d a t a , i.e., n e a r t h e t a i l o f a d i s t r i b u t i o n . I t c a n a l s o b e u t i l i z e d t o a s s e s s t h e
p r o b a b i l i t y o f l a c k o f e a r t h q u a k e s ; i.e., t h e p r o b a b i l i t y o f c o n t i n u a t i o n o f a " s e i s m i c
gap." Both determinations
can be location-specific and on a "real-time" basis.
D i s c u s s e d b e l o w is t h e m e t h o d o l o g y f o r e v a l u a t i o n o f " s e i s m i c g a p s " a n d c h a r a c t e r ization of tails of magnitude distributions.
Characterization of seismic gaps. T h e r e is n o w e l l - a c c e p t e d d e f i n i t i o n o f a
"seismic gap." The term "gap" has been applied both in a spatial and/or temporal
TABLE 6
EARTHQUAKE PROBABILITIES FOR THE NEXT 40 YEARS
CACULATED FROM THE MODEL (M0 -- 8 + 0.2; to = 5 yr)
Probability
0.1933
0.1691
0.9840 × 10 ~
0.9539 x 10-~
0.5852 × 10-~
0.5627 x 10-~
0.5593 × 10 ~
0.4684 × 10-1
0.3966 x 10-~
0.2371 × 10-~
0.1981 × 10-~
0.1849 x 10-~
0.1770 x 10-~
0.1724 x 10 ~
0.9683 x 10-2
0.8271 x 10-z
0.7256 x 10-2
0.7229 x 10-2
0.6807 x 10-2
0.5505 x 10-2
0.2764 x 10-2
0.2490 x 10-2
0.2451 x 10-2
0.1828 × 10-2
0.1081 x 10-2
0.1067 x 10-z
0.7314 x 10-~
0.6698 x 10-z
0.3025 x 10-3
0.2575 x 10-3
0.1035 x 10-3
0.5808 × 10-4
Number of Great Earthquakes of
Each Magnitude
8 -+ 0.2
8.4 ± 0.2
&75 +_0.15
0
1
2
0
1
0
1
3
2
2
3
4
0
1
1
2
3
2
0
0
1
1
0
0
1
1
2
0
0
0
0
0
0
0
0
o
1
1
0
0
1
0
1
0
1
1
2
1
0
2
2
0
2
0
2
1
1
3
0
3
2
3
0
1
0
0
0
1
0
0
1
0
0
1
0
0
1
1
0
1
1
0
0
2
1
2
1
2
2
0
2
0
2
1
3
3
sense. When used only in a spatial sense, it refers to a zone in which no great
earthquake has occurred for sometime since the last great earthquake {usually for
m o r e t h a n 2 0 t o 30 y r ) , w h i l e t h e a d j a c e n t z o n e s h a v e e x p e r i e n c e d g r e a t e a r t h q u a k e s
within the same time period. When used in a spatial-temporal sense, it refers to the
nonoccurrence of a great earthquake in a given zone or part of it for a period of time
s i n c e t h e l a s t g r e a t e a r t h q u a k e . I n t h i s p a p e r , t h e t e r m is u s e d i n t h e l a t t e r s e n s e
(i.e., s p a t i a l - t e m p o r a l s e n s e ) . T h e m i n i m u m t i m e p e r i o d f o r t h e i d e n t i f i c a t i o n o f a
g a p is t a k e n a s o n e u n i t t i m e , i.e., 5 y r . T h e m o d e l c a n b e u t i l i z e d t o e s t i m a t e t h e
A SEMI-MARKOV
MODEL
FOR
RECURRENCE
OF
GREAT
EARTHQUAKES
339
probabilities that there will be no earthquake within a period of interest (say, 40 yr)
for different initial conditions.
Figure 5a shows an example in which the relationship between the probability of
continuation of a gap for the next 40 yr is plotted against the number of years for
which there have been no earthquakes following earthquakes of M = 8 +_ 0.2 and M
= 8.75 _ 0.15. Figure 5b shows similar relationships for area B. The relationships in
Figure 5a indicate that the probability that a gap will be formed following a
0.5
r
..
I
(a) For all areas except Area 8
t
0.4
1
Mo= 8.75 +- 0.15 - -
- -
==
o
.~
0.3
Mo = magnitude of last
great earthquake
•~
\
0.2
o
0.1
0
0
0.3
==
20
40
60
80
100
I
(b) For Area B
£9
E =
._~ ~ 0.2
.~-z 0.1
~.~
Mo= 8.78 ± 0.15
o
0
0
20
40
60
80
100
Number of Years Since the Last Great Earthquake, t o
FIG. 5. Probabilityof continuationof a seismic gap for differentinitial conditions.
magnitude 8 _ 0.2 earthquake is approximately 20 per cent in the first 5 yr. If no
great earthquake occurs for 20 yr, the probability of continuation of the gap for
another 40 yr decreases to approximately 10 per cent; this result differs from a
Poisson model, which indicates a constant probability of formation or continuation
of a gap.
Figure 5a would seem to indicate that for a previous earthquake of magnitude
8.75 _ 0.15, the probability of continuation of the gap would show little change for
elapsed times of up to 60 yr. This result is primarily due to relatively large estimated
holding times for earthquakes following an 8.75 +_ 0.15 magnitude earthquake used
in present analysis. It can be expected that for larger elapsed times (>100 yr) the
probability of continuation of the gap would decrease, thus conforming to the
340
ASHOK
S. P A T W A R D H A N ,
RAM
B. K U L K A R N I ~
AND
DON
TOCHER
generally non-Poissonian character. A similar trend can also be observed for area B
(Figure 5b) which has relatively shorter holding times.
In a different seismic e n v i r o n m e n t such as area B, the corresponding probabilities
for M = 8 + 0.2 for the continuation of a gap for periods of 5 and 20 yr are 10 and
4 per cent, respectively; i.e., considerably smaller t h a n the probabilities for the
continuation of gaps in other areas. In other words, gaps in area B h a v e a greater
likelihood to be filled t h a n the gaps in other areas. T h e relationships in Figure 5a
also indicate t h a t the probability of continuation of a gap after the lapse of any
given t i m e period increases with the m a g n i t u d e of the last earthquake; this result is
to be anticipated. T h e trends for higher m a g n i t u d e s show s o m e interesting differences especially w h e n the elapsed t i m e is greater t h a n a p p r o x i m a t e l y 50 yr. As seen
TABLE
7
COMPARISON OF RELATIVE FREQUENCY OF GAP FROM HISTORICAL SEISMICITY DATA WITH
PROBABILITIES CALCULATED FROM MODEL (M0 -- 8 - 0.2)
M~)
t~, yr
Period of
Interest,
tyr
8 +- 0.2
8 _+0.2
8 +_0.2
8 +_-0.2
5
5
30
5
5
20
20
40
Number of Events
Number of Events
with at Least One
with No Earthquake
Earthquake in Time
in Time t
t
5
12
2
18
Relative Frequency
of Gap from Data
Probability of Gap
from Model
0.81
0.50
0.60
0.18
0.74
0.42
0.42
0.19
22
12
3
4
TABLE 8
COMPARISON OF RELATIVE FREQUENCY OF GAP FROM HISTORICAL SEISMICITY DATA WITH
PROBABILITIESCALCULATEDFROMMODEL(Mo =
M(~
t~, yr
Period of
Interest,
tyr
8.4 +- 0.2
8.4 + 0.2
8.4 +--0.2
8.4 -+ 0.2
8.4 +- 0.2
8.4 -+ 0.2
5
5
30
5
30
30
5
20
20
40
40
5
Number of Events
Number of Events
with at Least One
with No Earthquake
Earthquake in Time
in Time t
t
4
10
2
16
2
1
24
16
3
4
2
6
8 + 0.2)
Relative Frequency
of Gap from Date
Probability of Gap
from Model
0.86
0.62
0.60
0.20
0.50
0.86
0.77
0.40
0.58
0.24
0.31
0.88
f r o m the posterior probability distribution for zij > 40 yr, the probability of having
a m a g n i t u d e 8 +__0.2 or 8.4 +__0.2 e a r t h q u a k e s is very small, and the probability of
continuation of a gap is primarily the probability of having no e a r t h q u a k e s of
m a g n i t u d e 8.75 +_ 0.15. T h i s result is discussed further in the next p a r a g r a p h .
T h e probabilities of continuation of a gap for different initial conditions (M0, to)
a n d different t i m e periods of interest (t) are shown in T a b l e s 7 and 8 for all areas
except area B. T a b l e 7 gives values of probabilities (M0 = 8 +_ 0.2) e s t i m a t e d f r o m
the m o d e l and corresponding relative frequency values e s t i m a t e d by directly using
the sample d a t a and d a t a on the events with no e a r t h q u a k e s for a n u m b e r of years
following M / s h o w n in T a b l e 3. As seen from the table, the values calculated f r o m
the m o d e l show very good a g r e e m e n t with the data. F o r example, to e s t i m a t e the
probabilities f r o m the d a t a in T a b l e 3 for M0 = 8, to --- 5, and t -- 5, the sample d a t a
and the d a t a on n u m b e r of years for different events with no e a r t h q u a k e following
Mi = 8 ± 0.2 were examined to count the n u m b e r of events with at least one
e a r t h q u a k e in 5 yr (5 events) and the n u m b e r of events with no e a r t h q u a k e s between
5 a n d 10 yr (22 events), which yield a relative frequency of 22/27 -- 0.81 for the
A
SEMI-MARKOV
MODEL
FOR
RECURRENCE
OF
GREAT
EARTHQUAKES
341
continuation of a gap. This value compares favorably with the probability of 0.74
estimated from the model. Similar estimates for other initial conditions show good
agreement with the model except where the data are too scanty (e.g., Mo = 8 + 0.2,
to = 30 yr, t = 20 yr).
Table 8 shows a similar comparison for Mo = 8.4 + 0.2. As in the previous case,
the agreement between estimates of probability of continuation of gaps from the
data and the probabilities estimated from the model is reasonable. This agreement
between the probabilities of formation of gaps also suggests that the prior distributions based on subjective assessment are reasonable.
1.2
m
t
s
D; Semi-Markov Model
Mo = 8 -+ 0.2, t o = 80 years
1.0
.E
s A ;
0.8
~
~
" ' , ~ ' ~
A
2,
Poisson Model, b = 1.0
0.6
C; Semi-Markov Model
~1o = 8 -+ 0.2, to = 30 years
" \ . \,~
2
0.4
Mo ~ 8 -+ 0.2, t o = 5 years ~
*~.~.
0.2
0
7.8
I
I
I
8.0
8.2
8.4
I .
8.6
8.8
Earthquake Magnitude. M
Mo, t o initial conditions of semi-Markov model
Mo = magnitude of last great earthquake
t o = waiting time since last great earthquake
Fro. 6. Comparisonof magnitudedistributionrelationshipsderivedfromthe modelfor differentinitial
conditionswith relationshipsbased on the Poissonmodel.
Characterization of tails of earthquake magnitude distribution. A Poisson model
of earthquake occurrences based on a typical N ( M ) curve {i.e., a and b values)
generally does not give reasonable estimates of probabilities of great earthquakes
(e.g., Ms >- 7.8). We believe that the semi-Markov model developed in this study
provides a better characterization of the tails of the probability distribution of
earthquake magnitudes since the model takes into account the interaction between
the length of holding time and the magnitude of the next great earthquake, and the
influence of recent energy releases on the magnitude and time of the next great
earthquake.
Figure 6 shows the probability of at least one earthquake of magnitude M or
greater in the next 40 yr for different initial conditions. For comparison, the
probabilities calculated from a Poisson model using an average number of 2.44
earthquakes = 7.8 in 40 yr have a b value of 1.0. These values approximately
342
ASHOKS. PATWARDHAN, RAM B. KULKARNI, AND DON TOCHER
represent the level of seismic activity for great earthquakes in zone 4 of the AlaskaAleutian area. It is seen that the results of a Poisson model are close to those of the
semi-Markov model with initial conditions Mo = 8 and to = 5 yr; i.e., the case in
which a magnitude 8 + 0.2 earthquake occurred 5 yr ago. For areas where a great
earthquake has not occurred for a relatively long period of time (e.g., 11//o= 8, to =
8 yr), the probability of occurrence of another great earthquake in, say, 40 yr is
significantly higher than that estimated by a Poisson~model.
The Poisson model seems to give higher probabilities for the occurrences of
multiple earthquakes (n => 3) in 40 yr than the semi-Markov model for the initial
conditions of Mo --- 8 and to in 5 yr. For the latter model, the probabilities of
occurrences of a given number of earthquakes are influenced by the initial conditions
(recent releases of strain energy); these probabilities provide inputs to a seismic risk
model that are more consistent with the postulated earthquake mechanism of strain
accumulation and release. For example, the results would indicate that to achieve
the same level of risk, a facility in a zone with a seismic "gap" of, say, 50 yr after the
occurrence of a magnitude 8 earthquake should be designed for a higher seismic
loading than a facility in a zone where a magnitude 8 earthquake occurred, say, 5 yr
ago; this inference appears to be reasonable.
Figure 7a indicates that the probability of a continuation of a seismic gap in the
next 40 yr increases for elapsed times greater than approximately 50 yr. This result
would appear to stem from the fact that for the number of years elapsed since the
last earthquake exceeds a certain value, an earthquake of magnitude 8 + 0.2 is less
likely to occur than an earthquake of a higher magnitude. In other words, under the
given circumstances, the system is likely to wait a little longer and produce a larger
magnitude earthquake. As the elapsed time continues to grow, the probability of a
higher magnitude earthquake would increase further and, consequently, the probability of continuation of a seismic gap would decrease. Additional data and interpretations are necessary to examine the trends for larger earthquake magnitudes and
longer elapsed times.
PARAMETRIC ANALYSES
To assess the effect of variation in input parameters on the results provided by
the model, two analyses were made. In one, the holding times in the prior distributions were increased by factors of 1.5 and 6. The probabilities of continuation of a
seismic gap for the next 40 yr for both cases of increased holding time for Mo = 8
+ 0.2 and 8.75 + 0.15 and different time periods (to) after the previous great
earthquakes are shown in Figure 7. When the holding times are increased by a factor
1.5, the probability of continuation of a seismic gap followinu a magnitude Mo = 8
+ 0.2 earthquake increases by a factor of 2 to 3; while for an increase by a factor 6,
the corresponding probability increases by a factor 10. In the case of higher
magnitudes (Mo = 8.75 _+ 0.15), a different trend is observed. If the holding time is
increased by a factor 1.5, the probability of continuation of a gap for 40 yr increases
by a factor 7. If the holding time is increased by a factor 6, the probability of a gap
increases by a factor 14. This is so because, as the average holding times increase,
the probability of having earthquakes of magnitudes 8 +_. 0.2 or greater are not
insignificant even after 40 yr and the probability of continuation of a gap is not
small. The historical seismicity data indicate a similar trend.
The second parametric analysis of the zones was defined, based on variable
rupture lengths. Considerable uncertainty exists in the rupture lengths appropriate
for different areas. Kelleher and McCann (1976) give estimates of maximum rupture
A SEMI-MARKOV MODEL FOR RECURRENCE OF GREAT EARTHQUAKES
0.9
I
343
T
(a) For all areas except Area B
(holding times increased by
a factor 6)
0.8
~
E =~
~
]
/
Mo = 8.75 ± 0.15
0.7
r~Q
. = z 0.6
~._=
o
.Q
~
Mo = 8 ± 0.2
J
0.5
4
J
0,4
0.5
20
40
I
I
60
80
100
(b) For all areas except Area B
(holding times increased by
a factor 1.5)
0.4
M o = magnitude of last
great earthquake
E ~
.~
~ 0.3
o~
.~z
~=._=
0.2
t~
0.1
0
0
0.3
20
40
60
80
100
I
(c) For Area B
(holding times increased by
a factor 1.5)
~~
o.~
=
.
+
.
. ~ z 0.1
0
0
20
40
60
80
100
Number of Years Since the Last Great Earthquake, t o
Fro. 7. Probability of continuation of a seismic gap for different initial conditions (holding t ~ e
increased approximately by a factor 1.5 and 6).
344
ASHOK S. P A T W A R D H A N ~
RAM B. K U L K A R N I ,
•- d r -
c~
~-
~
cq
c~
c~
¢~
cq
A N D D O N TOCI-IER
c~
z
C)
t~
c~
+1
c'q
+1 +~ +1
o~
+1
+1
~d
+~
A SEMI-MARKOV MODEL FOR R E C U R R E N C E OF GREAT EARTHQUAKES
345
T A B L E 10
SUMMARY OF TRANSITION STATES USED IN PARAMETRIC ANALYSIS
Prior Fractiles (Mag)
Initial State Mi
8 -+ 0.2
8.4 _ 0.2
8.75 ___0.15
Posterior Fractiles (Mag)
Sample Data (Mag)
8.4, 8, 8.7, 8.8, 7.9, 7.9, 7.9, 8.3,
7.8, 8.3, 8.8, 8.1, 8.4, 8.4, 8.4,
8.3, 7.9, 8.3, 7.9
7.9, 7.8, 8.1, 7.9, 7.9, 8.1, 7.8, 7.9,
8.4, 8, 7.9, 8.3, 8.3, 8.3, 8.6, 8.3,
8.2
7.8, 8.3
0.25
0.50
0.75
1.0
0.25
0.50
0,75
1.0
8.4,
7.8,
7.0
8
8.4
8.8
7.9
8.1
8.5
8.8
7.8,
8.6,
7.9
8
8.4
8.8
7.9
8
8.4
8.8
7.9
8
8.4
8.8
7.8
8
8.6
8.8
Note: Zones were defined by using variable magnitude-rupture length relationships (all areas except
area B, see Figure 2).
0.6
I
(a) For all areas except Area B
0.5
8.75 z 0.15
0.4
~>-
o.3
o~
'~._~
M o = magnitude of last
great earthquake
\
0.2
e
0.1
0
0
0.3
~
-+ 0.2
20
40
60
80
100
80
100
l
(b) For Area B
._
0.2
+- 0.15
. ~ z 0.1
~._~
e~
+
0
0
20
40
60
Number of Years Since the Last Great
Earthquake, t o
FIC. 8. Probability of continuation of a seismic gap for different initial conditions using variable
magnitude-rupture length relationships.
346
AS~.tOK S. PATWARDHAN, RAM B. KULKARNI, AND DON TOCHER
lengths but do not suggest magnitude-length relationships for different areas.
Assuming that these lengths are associated with the largest magnitude from historical data in a given area, the rupture lengths of lesser magnitudes were selected by
judgment. Thus, zones in the Alaska-Aleutian area are based on a rupture length of
800+_ km for M0 = 8 _+0.2, while those in the Honshu area are based on rupture
lengths of 150 to 200 kin. Table 9 shows the sample data, prior and posterior
estimates of holding times, and lengths of gaps in the various areas. Table 10 shows
the sample data and prior and posterior estimates of transition states. A comparison
of Table 9 with Table 3, and Table 10 with Table 2, is instructive. Use of variable
rupture lengths decreases the size of sample data, increases the number of gaps, and
suggests generally longer holding times. The probability of continuation of seismic
gaps for various initial conditions are expected to be higher, as the case in Figure 8
illustrates.
The parametric analyses provide a useful insight into the effect of rupture sizes
and holding times on the formation and continuation of gaps. Thus, in areas where
the rupture lengths are higher or holding times are longer, the probability of
formation and continuation of a gap is higher. The results illustrated in Figures 5
and 7 provide an approximate quantitative assessment of the degree of variation.
These results can be applied for differentiating between the characteristics of gaps
in different areas, e.g., between Alaska-Aleutians area and Japan, or between Central
America and New Guinea.
SUMMARY AND CONCLUSIONS
A semi-Markov model is developed to estimate the likelihoods of occurrences of
great earthquakes (magnitude >7.8) at a given location during a specified period of
interest. The model takes into account the influence of the length of time over which
strain energy is accumulating since the most recent great earthquake in a zone on
the magnitude and time of the next great earthquake in the zone.
The basic parameters of the model are (1) probability distribution of holding
times between earthquakes of magnitudes Mi and Mj, (2) transition probabilities
(i.e., the probabilities that the next earthquake will be of specified magnitudes
following an earthquake of magnitude Mi), and (3) initial seismicity conditions of a
zone (i.e., magnitude Mo of the most recent great earthquake and time to since that
earthquake). These parameters were obtained by combining historical seismicity
data and expert judgments through the use of a Bayesian procedure. This procedure
provided better reliability in the estimation of the parameters than using only the
limited historical seismicity data.
The values of probabilities of different magnitudes and holding times are influenced in part by the accuracy and completeness of the historical seismicity record
with respect to location and magnitude. Careful reevaluation of the data should be
made before applying the model to a specific area.
The model is based on a qualitative assessment of strain accumulation and
intermittent release. The possibility of making quantitative assessments in terms of
seismic moments should be explored.
The application of the model was discussed for high seismicity areas in the circumPacific belt in which the primary process of earthquake generation is that of
subduction. The basic output of the model is the set of probabilities of occurrence
of a different number of various magnitude earthquakes (~7.8) in a given zone
during selected periods of interest. This output can be used for a variety of purposes
in seismicity evaluation problems: (1) characterization of a seismic gap, (2) definition
A SEMI-MARKOV MODEL FOR RECURRENCE OF GREAT EARTHQUAKES
347
of real time inputs to the seismic risk model, (3) characterization of tails of
earthquake magnitude distributions.
The semi-Markov model provides several advantages over other models in that it
is location specific, can take into account initial conditions, and is flexible enough so
that its parameters can be adjusted to represent any regimen of great earthquake
occurrences such as predominance of certain magnitudes and variations in holding
times. The probabilities of earthquake occurrence (and gaps) estimated from the
model show reasonably good agreement with the values obtained from available
data.
ACKNOWLEDGMENTS
This work is part of an ongoing study supported by the Professional Development Program of
Woodward-Clyde Consultants. The authors gratefully acknowledge this support from WCC, especially
Dr. I. M. Idriss, Mr. Douglas C. Moorhouse, and Dr. Keshavan Nair. Dr. Chhote Saraf assisted in the
computer analyses, and Mr. Robert L. Nowack assisted in the compilation of earthquake data. Dr.
William U. Savage reviewed the manuscript and made several useful suggestions.
REFERENCES
Benioff, H. (1951). Global strain accumulation and release as revealed by great earthquakes, Bull. Geol.
Soc. Am. 62, 331-338.
Esteva, L (1976). Developments in geotechnical engineering ser.: 15, in Seismic Risk and Engineering
Decisions, Elsevier, New York.
Hagiwara, Y, (1975). A stochastic model of earthquake occurrence and the accompanying horizontal land
deformations, Tectonophysics 26, 91-101.
Howard, R. A. {1971). Dynamic Probabilistic Systems, vol. 2, John Wiley & Sons, New York.
Kelleher, J. and W. McCann (1976). Buoyant zones, great earthquakes, and unstable boundaries of
subduction, J. Geophys. Res. 81, 4885-4896.
Kelleher, J., J. Savino, H. Rowlett, and W. McCann (1974). Why and where great thrust earthquakes
occur along island arcs, J. Geophys. Res. 79, 4889-4899.
Knopoff, L. and Y. Kagan (1977). Analysis of the theory of extremes as applied to earthquake problems,
J. Geophys. Res. 82.
Mogi, K. (1968). Some features of recent seismic activity in and near Japan, Bull. Earthquake Res. Inst.,
(Tokyo Univ.) 46, 1225-1236.
Nair, K. and L. S. Cluff (1977). An approach to establishing design surface displacements for active faults,
Proc. World Conf. Earthquake Eng., 6th, New Delhi.
Patwardhan, A. S., D. Tocher, and E. D. Savage (1975). Relationship between earthquake magnitude
and length of rupture surface based on aftershock zones, Bull. Geol. Soc. Am. (Abstracts with
Programs), 7.
Raiffa, H. (1968). Decision Analysis, Addison-Wesley, Reading, Massachusetts.
Raiffa, H. and R. Schlaifer (1960). Applied Statistical Decision Theory, Harvard University, Cambridge.
Rikitake, T. (1975). Statistics of ultimate strain of the earth's crust and probability of earthquake
occurrence, Tectonophysics 26, 1-21.
Sykes, L. R. (1971). Aftershock zones of great earthquakes, seismicity gaps, and earthquake prediction
for Alaska and the Aleutians, J. Geophys. Res. 76, 8921-8041.
Tocher, D. (1958). Earthquake energy and ground breakage, Bull. Seism. Soc. Am. 48, 147-153.
U. S. Geological Survey (1977). National Oceanic and Atmospheric Administration Hypocenter Data
File.
WOODWARD-CLYDE
CONSULTANTS
3 EMBARCADEROCENTER
SAN FRANCISCO,CALIFORNIA94111
Manuscript received March 13, 1979