Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Time in physics wikipedia , lookup
Electrostatics wikipedia , lookup
Electromagnetism wikipedia , lookup
Magnetic field wikipedia , lookup
Lorentz force wikipedia , lookup
Neutron magnetic moment wikipedia , lookup
Maxwell's equations wikipedia , lookup
Aharonov–Bohm effect wikipedia , lookup
Magnetic monopole wikipedia , lookup
Condensed matter physics wikipedia , lookup
UIUC Physics 435 EM Fields & Sources I
Fall Semester, 2007
Lecture Notes 19
Prof. Steven Errede
LECTURE NOTES 19
MAGNETIC FIELDS IN MATTER
THE MACROSCOPIC MAGNETIZATION, Μ
There exist many types of materials which, when placed in an external magnetic field
Bext ( r ) become magnetized — i.e. at the microscopic level ∃ internal atomic/molecular magnetic
dipole moments matom or mmolecular , which, in the presence of the external aligning magnetic field
Bext ( r ) produce magnetic torques τ ( r ) = m ( r ) × Bext ( r ) which act on the individual
atomic/molecular dipole moments, thereby causing a net alignment of the atomic/molecular
magnetic dipole moments matom mmolecular which in turn results in a net, macroscopic magnetic
polarization, also known as the magnetization, Μ ( r ) . This is analogous to the situation
associated with dielectric materials where electrostatic torques τ ( r ) = p ( r ) × Eext ( r ) act on
individual atomic/molecular electric dipole moments patom pmolecular in an external electric
field Eext ( r ) resulting in a net, macroscopic electric polarization, Ρ ( r ) .
In the absence of an external applied magnetic field (i.e. Bext ( r ) = 0 ) the macroscopic
alignment of the atomic/molecular magnetic dipole moments matom mmolecular (in many, but not all
magnetic materials) is random, due to fluctuations in the internal thermal energy of the material
at finite temperature (e.g. room temperature). Thus, no net macroscopic magnetization
M ( r ) exists in many such materials for Bext ( r ) = 0 at finite (absolute) temperature, T.
We define the macroscopic magnetic polarization (a.k.a. magnetization) M ( r ) of a magnetic
material in complete analogy to that associated with the macroscopic electric polarization
P ( r ) of a dielectric material:
Macroscopic Electric Polarization P ( r ) :
⎛ electric dipole moment ⎞
P (r ) = ⎜
SI Units of P : Coulombs/m2
⎟ at point r
unit volume
⎝
⎠
N
N
p (r )
Q d (r )
P ( r ) = nmol pmol ( r ) ≡ ∑ moli i
=∑ i i i
Volume,
Volume, V
V
i =1
i =1
nmol =
# atoms/molecules
unit volume
Macroscopic Magnetic Polarization/Magnetization M ( r ) :
⎛ magnetic dipole moment ⎞
SI Units of M : Amperes/meter
M (r ) = ⎜
⎟ at point r
unit volume
⎝
⎠
N
N
m (r )
I a (r )
M ( r ) = nmol mmol ( r ) ≡ ∑ moli i
=∑ i i i
Volume,
Volume, V
V
i =1
i =1
© Professor Steven Errede, Department of Physics, University of Illinois at Urbana-Champaign, Illinois
2005-2008. All Rights Reserved.
1
UIUC Physics 435 EM Fields & Sources I
Fall Semester, 2007
Lecture Notes 19
Prof. Steven Errede
Note that the magnetization Μ ( r ) has SI units the same as that for a surface current density,
K ( r ) (Amperes/meter), whereas the electric polarization P ( r ) has SI units the same as that for a
surface charge density, σ ( r ) (Coulombs/m2).
There are (at least) four kinds of magnetism:
Μ dia ( r )
Bext ( r )
1.) DIAMAGNETISM:
The induced macroscopic magnetization Μ dia ( r ) is antiparallel to Bext ( r ) . Due to the physics
origin of diamagnetism at the microscopic scale – i.e. at the atomic/molecular scale, ALL
substances are diamagnetic! However, diamagnetism is very a weak phenomenon – other kinds
of magnetism (see below) can “over-ride”/mask out the diamagnetic behavior of a material.
Diamagnetism results from changes induced in the orbits of electrons in the atoms/molecules
of a substance, due to the applied/external magnetic field. The direction of the change in orbital
motion of the electrons is such that it to opposes the change in applied magnetic flux (this is
nothing more than Lenz’s Law acting at the microscopic/atomic/molecular scale!).
Superconductors are examples of strong diamagnets – they are in fact perfect diamagnets,
completely* screening out the applied external magnetic field Bext ( r ) (* if no flux-pinning
defects are present in the superconducting material). Note that Μ dia ( r ) vanishes when
Bext ( r ) = 0 .
Μ para ( r )
Bext ( r )
2.) PARAMAGNETISM:
The induced macroscopic magnetization, Μ para ( r ) is parallel to Bext ( r ) . Atoms or molecules
that have a net orbital and/or intrinsic spin magnetic dipole moment m (e.g. atoms/molecules
with unpaired electrons – such as A , Ba, Ca, Na, Sr , U ,… and also metals – due to the
magnetic dipole moments m associated with intrinsic spins of the conduction electrons) are
paramagnetic materials. The external applied magnetic field Bext ( r ) exerts a torque on these
atomic/molecular magnetic dipole moments m which tends to (partially) align them, giving rise
to a net Μ para ( r ) which is parallel to Bext ( r ) . The energy of alignment U M ( r ) = − m ( r )i Bext ( r )
is a minimum when m is parallel to Bext ( r ) . This is analogous to the net induced electric
polarization Ρ ( r ) which is parallel to Eext ( r ) in dielectric materials, the energy of alignment
U E ( r ) = − p ( r )i Eext ( r ) when p is parallel to Eext ( r ) . Note that Μ para ( r ) also vanishes
when Bext ( r ) = 0 .
2
© Professor Steven Errede, Department of Physics, University of Illinois at Urbana-Champaign, Illinois
2005-2008. All Rights Reserved.
UIUC Physics 435 EM Fields & Sources I
Fall Semester, 2007
Lecture Notes 19
Prof. Steven Errede
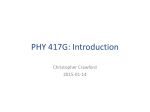
3.) FERROMAGNETISM: The macroscopic magnetization, Μ ferro ( r ) depends on the (entire)
past history of exposure to Bext ( r ) !! There exists a non-linear hysteresis-type relation between
Μ ferro ( r ) and Bext ( r ) . Iron and other ferromagnetic materials have a “macroscopic” crystalline
domain structure (a typical scale length involves many thousands of atoms), within a domain
(nearly) all of the atomic/molecular magnetic dipole moments m are aligned parallel to each
other ⇒ Μ domain ( r ) can be very large. However, the orientation of Μ domain over many domains is
≈ random, unless Bext ( r ) ≠ 0 . However, ferromagnetic materials have a critical temperature
(known as the Curie Temperature TC ) below which the domains can spontaneously align − a
phase transition occurs in the material at this temperature! In the presence of an external applied
magnetic field Bext the alignment of ferromagnetic domains tends to be parallel to Bext , but it is in
fact (more) complicated than this, because it it history dependent!!! The alignment arises from
quantum mechanics – intrinsic spin and the Pauli exclusion principle. Thus, Μ ferro ( r ) does not
vanish when Bext ( r ) = 0 !!!
History-Dependence / Hysteresis Relation Between Μ ferro and Bext for Ferromagnetic Materials
for T < TC (= Curie Temperature):
Ferromagnetic behavior vanishes for T > TC The material then becomes paramagnetic.
The arrows indicate the path taken for Μ ferro : Bext starts at Bext = 0 , then goes to Bmax , then
through 0, going to Bmin , then through 0 again and then going to Bmax , etc….
4.) ANTI-FERROMAGNETISM (a.k.a. FERRIMAGNETISM)
In some magnetically-ordered materials ∃ an anti-parallel alignment of intrinsic spins, due to
two (or more) inter-penetrating crystalline structures, such that no spontaneous magnetization in
the bulk material occurs. Ferrimagnetism/antiferromagnetism occurs for temperatures T < TNe ' el .
Materials exhibiting antiferromagnetic properties are relatively uncommon – e.g. URu2Si2.
© Professor Steven Errede, Department of Physics, University of Illinois at Urbana-Champaign, Illinois
2005-2008. All Rights Reserved.
3
UIUC Physics 435 EM Fields & Sources I
Fall Semester, 2007
Lecture Notes 19
Prof. Steven Errede
FORCES & TORQUES ON MAGNETIC DIPOLES
When a magnetic dipole with magnetic dipole moment m is placed in an external magnetic
field Bext a torque on the magnetic dipole τ M = m × Bext will occur, just as we saw for the case of
an electric dipole with electric dipole moment p when it is placed in an external electric field
Eext giving rise to a torque on the electric dipole τ E = p × Eext .
As we also learned for the case of an electric dipole in a uniform external electric field,
similarly, for a magnetic dipole placed in a uniform external magnetic field, there is no net force
acting on the magnetic dipole.
For a magnetic dipole with magnetic dipole moment m (e.g. arising from a current loop)
placed in an uniform external magnetic field Bext the net force on the is zero:
Fmnet = I ∫ d ′ ( r ′ ) × Bext ( r ′ ) = I
C′
(∫
C′
)
d ′ ( r ′ ) × Bext ( r ′ ) = 0
≡0
cf w/ that for an electric dipole placed in a uniform external electric field Eext :
(
)
Fpnet = F+ ( r+ ) + F− ( r− ) = qEext ( r+ ) − qEext ( r− ) = q Eext ( r+ ) − Eext ( r− ) = 0
The nature of the magnetic (electric) torque τ M = m × Bext (τ E = p × Eext ) is such that it tends
to align m ( p ) with (i.e. parallel to) the applied/external Bext
( E ) respectively.
ext
⇒ The effect(s) of magnetic torque explains paramagnetism, with Μ para Bext . One might be
tempted to believe that paramagnetism should be a universal phenomenon, common to all
materials. However, paramagnetism is connected to the intrinsic magnetic dipole moment of an
unpaired electron and/or its orbital magnetic dipole moment. Because of the Pauli exclusion
principle (identical fermions, here, electrons) cannot be in the exact same quantum state, hence
pairs of electrons can only be in the same quantum state with one of them spin-up, and the other
spin down. Thus, torques on paired magnetic dipole moments (or more correctly, the B -fields
associated with the paired electron magnetic dipole moments me ) cancel.
⇒ Paramagnetism only arises in atoms/molecules with an odd number of electrons – the
outermost electron is unpaired ⇒ hence it (alone) is subject to magnetic torque(s).
As we saw in the case for an electric dipole with electric dipole moment p in a non-uniform
external electric field Eext , a non-zero force acts on the electric dipole. Similarly, for a magnetic
dipole, with magnetic dipole moment m in a non-uniform external magnetic
field Bext experiences a non-zero force:
(
( r ) = ∇ ( p ( r )i E
) (
)
( r ) ) = ( p ( r )i∇ ) E
Fm ( r ) = ∇ m ( r )i Bext ( r ) = m ( r )i∇ Bext ( r ) {last step valid iff m ( r ) = constant vector}
Fp
4
ext
ext
(r )
{last step valid iff p ( r ) = constant vector}
© Professor Steven Errede, Department of Physics, University of Illinois at Urbana-Champaign, Illinois
2005-2008. All Rights Reserved.
UIUC Physics 435 EM Fields & Sources I
Fall Semester, 2007
Lecture Notes 19
Prof. Steven Errede
Similarly, work (= potential energy) of a magnetic (electric) dipole moment in an external
magnetic (electric) field, Bext ( Eext ) are (respectively) given by:
Wm = P.E.m = − mi Bext vs. W p = P.E. p = − p i Eext
The Physics of Diamagnetism
Atomic electrons orbit/revolve around the nucleus of the atom at some mean / average /
characteristic radius, R. Atomic electrons bound to the nucleus of an atom no longer behave like
point-like particles, but as quantum-mechanical matter waves. However, an orbiting atomic
electron “wave” still constitutes a circulating current:
I QM ~
Conventional
Current, I
eve
λe
=
eve
C
eve
2π R Gnd State
=
Gnd State
λe
C = 2π R for ground state
ẑ
Bext = Bo zˆ
R
e−
ve = veϕˆ
me = −me zˆ
Classically, a circulating point electric charge has:
I Class =
e
τ orbit
with τ orbit = C v = 2π R v
e
e
⇒ I Class =
eve
= I QM
2π R
⎛ eve ⎞
1
2
Then: m = Ia = − ⎜
⎟ π R zˆ = − ( eve R ) zˆ
2
⎝ 2π R ⎠
−
due to e charge
With no external magnetic field applied Bext = 0, thus the forces acting on the atomic electron are:
Felectrostatic = Fcentripetal
−
ve2
1 Ze 2
ve2
Ze 2
ˆ
ˆ
ˆ
r
m
rˆ
=
r
m
a
m
r
=
−
=
−
⇒
Equation
A:
e
e centipetal
e
4πε o R 2
R
4πε o R 2
R
1
me = mass of electron
Z = nuclear electric charge # {+Ze = nuclear charge}
© Professor Steven Errede, Department of Physics, University of Illinois at Urbana-Champaign, Illinois
2005-2008. All Rights Reserved.
5
UIUC Physics 435 EM Fields & Sources I
Fall Semester, 2007
Lecture Notes 19
Prof. Steven Errede
With an external magnetic field present Bext ≠ 0, thus the forces acting on the atomic electron are:
net
′
FEM
= Felectrostatic + FB = Fcentripetal
net
FEM
= Felectrostatic + FB = −
Ze 2
rˆ − e ve × Bext
4πε o R 2
1
(
)
Suppose Bext = B0 zˆ and ve = veϕˆ (as shown in above pix)
Then: ϕˆ × zˆ = ϕˆ × cos θ rˆ − sin θθˆ
θ = 90
(
)
= −ϕˆ × θˆ = − ( − r̂ ) = + r̂
rˆ × θˆ = ϕˆ
θˆ × ϕˆ = rˆ
θˆ × rˆ = −ϕˆ
ϕˆ × rˆ = θˆ
rˆ × ϕˆ = −θˆ
Then: F
net
EM
sin θ = sin 90 = 1
cos θ = cos 90 = 0
ϕˆ × θˆ = − rˆ
ve′ 2
Ze 2
′
=−
− eve′ Bo rˆ = Fcentripetal
= − me
rˆ
4πε o R 2
R
1
ve′2
Ze 2
′
+
=
ev
B
m
e o
e
4πε o R 2
R
Note that since we have an additional term on LHS of Equation B, then we see that:
ve′ Bext ≠ 0 ≠ ve Bext = 0 .
Then for Bext ≠ 0 we have Equation B:
(
)
(
1
)
Subtract Equation A from Equation B:
m
eve′ B0 = e ( ve′ 2 − ve 2 ) ⇒ ve′ > ve for Bext = + B0 zˆ ve′ < ve for Bext = − B0 zˆ
R
>0
(
)
>0
If the change in ve , Δve ≡ ( ve′ − ve ) is small, then: ve′2 − ve 2 = ( ve′ − ve )( ve′ + ve ) = Δve ( ve′ + ve )
But:
ve′ = ve + Δve (since Δve ≡ ( ve′ − ve ) )
∴ ve′2 − ve 2 = Δve ( ( ve + Δve ) + ve ) = Δve ( ve + Δve + ve ) = Δve ( 2ve + Δve )
= 2ve Δve + Δve 2
2ve Δve
neglect
∴ eve′ B0 = e ( ve + Δve ) B0
e ve B0
or: Δve
6
2 ve me
R
eBo R
2me
me
( 2ve Δve )
R
Δve
© Professor Steven Errede, Department of Physics, University of Illinois at Urbana-Champaign, Illinois
2005-2008. All Rights Reserved.
UIUC Physics 435 EM Fields & Sources I
Fall Semester, 2007
eve
ev′
and I ′ = e and ve′ > ve
2π R
2π R
e ( ve′ − ve ) eΔve
Then: ΔI = I ′ − I =
=
but: Δve
2π R
2π R
Lecture Notes 19
Prof. Steven Errede
But if: I =
∴
Then:
ΔI =
e 2 Bo R
e2 Bo
=
4π me R 4π me
ΔI =
e2 B0
4π me
eBo R
2me
m = Ia = I π R 2 and m′ = I ′a = I ′π R 2 ( a = π R 2 )
Thus: Δm = m′ − m = ( I ′ − I ) a = ΔIa = ΔI π R 2
∴
⎛ e 2 Bo ⎞
e 2 Bo R 2
2
Δm = Δ I π R 2 = ⎜
π
R
=
⎟
4me
⎝ 4 π me ⎠
But recall that m = − mzˆ
i.e. m points down.
e2 Bo R 2
Therefore: Δm = −
zˆ, Bext = Bo zˆ
4me
Or:
⎛ e2 R 2 ⎞
Δm = − ⎜
⎟ Bext
⎝ 4me ⎠
The point is, that for diamagnetic materials, the change in the magnetic dipole moment m , Δm
is opposite to the direction of Bext - i.e. if Bext = Bo zˆ increases, then m also increases, but in the
opposite direction to try to cancel/buck the external/applied magnetic field, Bext . This is a
simply a manifestation of Lenz’s Law at the atomic scale!!!
This is what phenomenon of diamagnetism is due to, at least from a ≈ semi-classical perspective.
The induced dipole moments in diamagnetic materials (essentially every material) point in the
direction opposite to the applied magnetic field. The macroscopic magnetization Μ resulting
from diamagnetism is relatively speaking very small. Diamagnetism (except in superconductors)
is extremely weak.
© Professor Steven Errede, Department of Physics, University of Illinois at Urbana-Champaign, Illinois
2005-2008. All Rights Reserved.
7
UIUC Physics 435 EM Fields & Sources I
Fall Semester, 2007
Lecture Notes 19
Prof. Steven Errede
THE MAGNETIC VECTOR POTENTIAL A ( r ) , THE MAGNETIC FIELD B ( r ) = ∇ × A ( r )
OF A MAGNETIZED OBJECT WITH MAGNETIZATION Μ ( r )
Recall that the magnetic vector potential A ( r ) of a magnetic dipole with magnetic dipole
moment m ( Amp-m 2 ) is:
⎛ μ ⎞ m × rˆ
Adipole ( r ) = ⎜ o ⎟ 2
⎝ 4π ⎠ r
{SI Units: Tesla-meters = Newtons/Ampere = F/I !!!}
Thus, in a magnetized object with macroscopic magnetization
(magnetic dipole moment per unit volume) Μ ( r ′ ) , each volume
element dτ ′ within the volume v′ has a magnetic dipole moment
associated with it of: m ( r ′ ) = Μ ( r ′ ) dτ ′ .
Thus, the infinitesimal contribution to the magnetic vector
potential A ( r ) due to the magnetic dipole moment m ( r ′ )
associated with the macroscopic magnetization Μ ( r ′ ) in the
infinitesimal volume element dτ ′ is:
⎛μ
dA ( r ) = ⎜ o
⎝ 4π
⎞ m ( r ′ ) × rˆ ⎛ μo
=⎜
⎟
r2
⎠
⎝ 4π
⎞ Μ ( r ′ ) dτ ′ × rˆ
with r = r − r ′
⎟
r2
⎠
Then the total magnetic vector potential A ( r ) is obtained by integrating this expression over the
entire volume v′ of the magnetized material:
⎛ μ ⎞ Μ ( r ′ ) dτ ′ × rˆ
A ( r ) = ∫ dA ( r ) = ⎜ o ⎟ ∫
v′
r2
⎝ 4π ⎠ v′
1
rˆ
⎛1⎞
= 2
Now again: ∇′ ⎜ ⎟ = ∇′
r − r′ r
⎝r⎠
⎛μ ⎞ ⎡
⎛ 1 ⎞⎤
Thus: A ( r ) = ⎜ o ⎟ ∫ ⎢Μ ( r ′ ) × ⎜ ∇′ ⎟ ⎥ dτ ′
⎝ r ⎠⎦
⎝ 4π ⎠ v′ ⎣
( )
(
)
( )
Integrating by parts, and using ∇ × fA = f ∇ × A − A × ∇f :
⎛μ
Then: A ( r ) = ⎜ o
⎝ 4π
Then using:
⎡ Μ ( r ′ ) ⎤ ⎫⎪
⎞ ⎧⎪ 1 ⎡
⎟ ⎨ ∫v′ r ⎣∇′ × Μ ( r ′ ) ⎤⎦ dτ ′ − ∫v′ ∇′ × ⎢ r ⎥ dτ ′⎬
⎠ ⎩⎪
⎣
⎦ ⎭⎪
∫ ∇ × V ( r ) dτ = − ∫ V ( r ) × da (V ( r ) = Arbitrary Vector Point Function )
v
S
(See Griffiths Problem 1.60 (b), page 56)
8
© Professor Steven Errede, Department of Physics, University of Illinois at Urbana-Champaign, Illinois
2005-2008. All Rights Reserved.
UIUC Physics 435 EM Fields & Sources I
Fall Semester, 2007
⎛ μ ⎞⎧ 1
Thus: A ( r ) = ⎜ o ⎟ ⎨ ∫ ⎡⎣∇′ × Μ ( r ′ ) ⎤⎦ dτ ′ +
⎝ 4π ⎠ ⎩ v′ r
But:
ˆ ′
da′ = nda
Then:
A(r ) =
Or:
ABound ( r ) =
μo
4π
∫
μ
1
⎡⎣∇′ × Μ ( r ′ ) ⎤⎦ dτ ′ + o
v′ r
4π
≡ J Bound ( r ′ )
∫
J Bound ( r ′ )
μ
dτ ′ + o
v′
4π
r
μo
4π
∫
Lecture Notes 19
Prof. Steven Errede
1
⎡Μ ( r ′ ) × da′⎤⎦ ⎬⎫
s′ r ⎣
⎭
∫
∫
1
⎡Μ ( r ′ ) × nˆ ⎤⎦ da′ = ABound ( r )
S′ r ⎣
≡ K Bound ( r ′ )
K Bound ( r ′ )
da′ with r = r − r ′
S′
r
Compare this result to that which we obtained for the magnetic vector potential A ( r ) associated
with a free volume current density J free ( r ′ ) and a free surface/sheet current density K free ( r ′ )
(see P435 Lecture Notes 16, page 6):
Afree ( r ) =
μo
4π
∫
v′
J free ( r ′ )
r
dτ ′ +
μo
4π
∫
K free ( r ′ )
S′
r
da′ with r = r − r ′
Thus for a magnetized material with macroscopic magnetization (magnetic dipole moment per
unit volume) Μ ( r ′ ) contained within in the enclosing source volume v′ bounded by the surface
S ′ , the magnetic vector potential at the field/observation point A ( r ) arising from the sum total of
the macroscopic magnetization Μ ( r ′ ) present in the material can be equivalently represented by
contributions from an equivalent bound volume current density J Bound ( r ′ ) ≡ ∇′ × Μ ( r ′ ) and an
equivalent bound surface current density K Bound ( r ′ ) ≡ Μ ( r ′ ) × nˆ surface where n̂ = outward unit
normal at the surface of the magnetized material.
On the interior of the magnetized material:
J Bound ( r ′ ) ≡ ∇′ × Μ ( r ′ ) = equivalent bound volume current density, SI units = Amps/m2
Amps / m 2
1/ m
Amps / m
On the surface(s) of the magnetized material:
K Bound ( r ′ ) ≡ Μ ( r ′ ) × nˆ = equivalent bound surface current density, SI units = Amps/m
Amps / m
Then: ABound ( r ) =
Amps / m
μo
4π
J Bound ( r ′ )
μ
∫v′ r dτ ′ + 4πo
K Bound ( r ′ )
∫ S ′ r da′ with r = r − r ′
© Professor Steven Errede, Department of Physics, University of Illinois at Urbana-Champaign, Illinois
2005-2008. All Rights Reserved.
9
UIUC Physics 435 EM Fields & Sources I
Fall Semester, 2007
Lecture Notes 19
Prof. Steven Errede
MAGNETIC MATERIALS
J Bound ( r ′ ) ≡ ∇ × Μ ( r ′ )
⇔
DIELECTRIC MATERIALS
ρ Bound ( r ′ ) = −∇iΡ ( r ′ )
K Bound ( r ′ ) ≡ Μ ( r ′ ) × nˆ
⇔
σ Bound ( r ′ ) = Ρ ( r ′ )inˆ
surface
surface
So again, instead of integrating over the macroscopic magnetization Μ ( r ′ ) (or polarization
Ρ ( r ′ ) ) arising from the direct contributions from the infinitesimal magnetic (and/or electric)
dipoles m ( r ′ ) (and/or p ( r ′ ) ), we replace these by macroscopic bound volume and surface
current distributions J Bound ( r ′ ) and K Bound ( r ′ ) (and/or ρ Bound ( r ′ ) and σ Bound ( r ′ ) ); we can then
obtain A ( r ) (and/or V ( r ) ). Once A ( r ) (and/or V ( r ) ) is known, we can then obtain B ( r ) from
B ( r ) = ∇ × A ( r ) (and/or E ( r ) from E ( r ) = −∇V ( r ) ) !
Note that for a magnetized material with macroscopic magnetization Μ ( r ′ ) we can also
obtain the equivalent bound current, I Bound from:
I Bound = ∫ J Bound ( r ′ ) da⊥′ + ∫
S⊥′
C⊥′ surface
K Bound ( r ′ ) d ′⊥
surface
Consider the equivalent bound surface current K Bound associated with a thin slab of
magnetized material that has been placed in uniform magnetic field Bext = Bo zˆ , in turn producing
a uniform macroscopic magnetization (magnetic dipole per unit volume) Μ = Μ o zˆ . At the
microscopic level, atoms and/or molecules will tend to have their induced and/or permanent
magnetic dipole moments lined up parallel/anti-parallel to Bext for paramagnetic / diamagnetic
materials, respectively. Suppose that the material is paramagnetic, as shown in the figure below:
m = Ia = Iazˆ
Bext = Bo zˆ produces
uniform magnetization
Μ = Μ o zˆ
It can be seen from the above figure that on the interior of the uniformly magnetized material
the atomic/molecular microscopic currents will cancel each other (for uniform magnetization,
Μ = Μ o zˆ ) except on the periphery (i.e. the surface) of the magnetic material.
For uniformly magnetized material(s), e.g. Μ = Μ o zˆ : J Bound ( r ) ≡ ∇ × Μ ( r ) = ∇ × ( Μ o zˆ ) = 0 .
10
© Professor Steven Errede, Department of Physics, University of Illinois at Urbana-Champaign, Illinois
2005-2008. All Rights Reserved.
UIUC Physics 435 EM Fields & Sources I
Then: I Bound = ∫
C⊥′ surface
K Bound ( r ′ ) d ′⊥
Fall Semester, 2007
surface
Lecture Notes 19
Prof. Steven Errede
for uniform magnetization, e.g. Μ = Μ o zˆ .
Example: Consider a cylindrical rod of radius a and length of magnetized material immersed
in a uniform Bext = Bo zˆ as shown in the figure below. Then the magnetization is uniform, e.g.
Μ = Μ o zˆ . Thus, no equivalent bound volume current density J Bound ( r ) exists, because
J Bound ( r ) = ∇ × Μ ( r ) = ∇ × ( Μ o zˆ ) = 0 for uniform magnetization, Μ = Μ o zˆ .
Uniform Μ = Μ o zˆ
ẑ
Bext = Bo zˆ produces uniform Μ = Μ o zˆ
Μ = nmol mmol
= Μ o zˆ
a
Μ = mTot Volume
I Bound =
K bound
Μ = mTot π a 2
mTot = total dipole moment
K Bound ( r ′ ) d ′⊥
= K bound ϕˆ
ϕ̂
K Bound = Μ × nˆ
∴
of magnetized
C⊥′ surface
ŷ
ρ̂
x̂
∫
surface
surface
with nˆsurface = ρˆ
= Μ o ( zˆ × ρˆ ) = Μ oϕˆ = K oϕˆ
I Bound = K bound ϕˆ = Μ o ϕˆ ,
i.e. K Bound = Μ oϕˆ = K oϕˆ
cylinder
If Bext ≠ uniform magnetic field, will result in a non-uniform magnetization, i.e. Μ ≠ uniform,
which in turn also implies that the equivalent bound volume current density J Bound = ∇ × Μ ≠ 0 .
This means that at microscopic level the atomic/molecular current loops no longer cancel each
other (completely) in the interior region of the magnetized material. Hence for Μ ≠ uniform:
Volume
J Bound ( r ′ ) = ∇ × Μ ( r ′ ) ≠ 0 ⇒ I Bound
= ∫ J Bound ( r ′ ) da⊥
S⊥′
Similarly, we also expect for non-uniform Μ that K Bound ( r ′ ) = Μ ( r ′ ) × nˆ surface ≠ 0 and thus we
will also have an equivalent bound surface current:
Surface
K Bound ( r ′ ) d ′⊥ surface (for magnetized cylinder in above figure: d ′⊥ = dz )
=∫
then I Bound
′
C⊥ surface
Then using the principle of linear superposition:
Tot
Volume
Surface
I Bound
= I Bound
+ I Bound
= ∫ J Bound ( r ′ ) da⊥ + ∫
S⊥′
C⊥′ surface
K Bound ( r ′ ) d ′⊥
surface
Note that these equivalent bound currents are flowing in different places in/on the magnetized
material – one is flowing inside the material, the other is flowing on the surface of the material.
© Professor Steven Errede, Department of Physics, University of Illinois at Urbana-Champaign, Illinois
2005-2008. All Rights Reserved.
11
UIUC Physics 435 EM Fields & Sources I
Fall Semester, 2007
(
Lecture Notes 19
Prof. Steven Errede
)
Note also that: ∇i J Bound ( r ) = ∇ × ∇ × Μ ( r ) = 0 always in magnetostatics, because ∇i J Bound ( r )
is the LHS of the Continuity Equation for equivalent bound currents (i.e. conservation of bound
charge):
∂ρ
(r ,t ) = 0
∇i J Bound ( r , t ) = − Bound
if ρ Bound ( r , t ) ≠ fcn(t).
∂t
(
)
(
)
(
)
Note also that (here): ∇ × ∇ × Μ ( r ) = ∇ ∇iΜ ( r ) − ∇ 2Μ ( r ) = 0 i.e.: ∇ ∇iΜ ( r ) = ∇ 2Μ ( r )
{We will come back to this relation in the near future…}
Griffiths Example 6.1:
Determine the magnetic field B ( r ) associated with a uniformly magnetized sphere of radius R
with uniform magnetization Μ = Μ o zˆ as show in the figure below. Choose the local origin ϑ
to be at the center of the magnetized sphere:
ẑ
ϕ̂
Μ = Μ o zˆ
r̂
P ( r ) Field/Observation Point
θ
θˆ ŷ
ϑ
ϕ
ϕ̂
x̂
Since the magnetization of the sphere is uniform, then: J Bound ( r ) = ∇ × Μ ( r ) = ∇ × ( Μ o zˆ ) = 0 .
However: K Bound ( r ) = Μ ( r ) × nˆ surface = Μ o ( zˆ × rˆ ) = Μ o sin θ ϕˆ where: nˆsurface = rˆ
(
)
(
)
Note: zˆ × rˆ = cos θ rˆ − sin θθˆ × rˆ = 0 − sin θ θˆ × rˆ = + sin θ ϕˆ since: rˆ × rˆ = 0, θˆ × rˆ = −ϕˆ
Now recall that we learned in Griffiths Example 5.11 (p. 236-7)/P435 Lecture Note 16 p. 18-19
(the charged spinning hollow sphere) that: K free = σ v = σω × r ′ = σω R sin ϕ ϕˆ
Uniformly Magnetized Sphere:
K Bound = Μ o sin θ ϕˆ
2
2
μo Μ o zˆ = μo Μ
3
3
⎛μ ⎞m
Boutside ( r > R ) = ⎜ o ⎟ 3 2 cos θ rˆ + sin θθˆ
⎝ 4π ⎠ r
4
4
m = π R 3Μ = π R 3Μ o zˆ
3
3
vs.
Binside ( r < R ) =
(
12
2
μo (σω R ) zˆ
3
⎛μ ⎞m
⇐ Boutside ( r > R ) = ⎜ o ⎟ 3 2 cos θ rˆ + sin θθˆ
⎝ 4π ⎠ r
4
4
m = π R 3 (σω R ) zˆ = π R 4σω zˆ
vs.
3
3
⇐
)
Charged Spinning Hollow Sphere:
K free = σω R sin θ ϕˆ ⇒ Μ o = σω R
Binside ( r < R ) =
(
© Professor Steven Errede, Department of Physics, University of Illinois at Urbana-Champaign, Illinois
2005-2008. All Rights Reserved.
)
UIUC Physics 435 EM Fields & Sources I
Fall Semester, 2007
Lecture Notes 19
Prof. Steven Errede
For magnetic media, we have obtained the following relations:
∂ρ
(r ,t )
Bound current continuity equation: ∇i J Bound ( r , t ) = − Bound
∂t
Equivalent bound volume current density J Bound ( r ) = ∇ × Μ ( r ) , where Μ ( r ) = magnetization (a.k.a.
magnetic dipole moment per unit volume) Μ ( r ) = nmo mmol ( r ) = mTot ( r ) volume and the
equivalent bound surface current density K Bound ( r ) = Μ ( r ) × nˆ surface ≠ 0 with corresponding relations
Volume
Surface
I Bound
= ∫ J Bound ( r ) da⊥ and I Bound
=∫
S⊥
C⊥ surface
K Bound ( r ) d
⊥ surface
Using the principle of linear superposition: total current density = free current + bound current
density:
J tot ( r ) = J free ( r ) + J Bound ( r )
K tot ( r ) = K free ( r ) + K Bound ( r )
Ampere’s Circuital Law becomes (in differential form) for the magnetic field B ( r ) :
∇ × B ( r ) = μo J Tot ( r ) = μo J free ( r ) + μo J Bound ( r )
Note that this is the analog of Gauss’ Law (in differential form) for the electric field E ( r ) :
∇i E ( r ) =
1
εo
ρTot ( r ) =
1
εo
(ρ (r ) + ρ
free
Bound
( r ))
(
Now: J Bound ( r ) ≡ ∇ × Μ ( r ) ∴ ∇ × B ( r ) = μo J free ( r ) + μo ∇ × Μ ( r )
(
)
)
or: ∇ × B ( r ) − μo ∇ × Μ ( r ) = μo J free ( r )
or:
1
μo
∇ × B ( r ) − ∇ × Μ ( r ) = J free ( r )
⎧1
⎫
or: ∇ × ⎨ B ( r ) − Μ ( r ) ⎬ = J free ( r )
⎩ μo
⎭
We now define the auxiliary field: H ( r ) ≡
1
μo
B (r ) − Μ (r )
SI Units of H = Amperes/meter
– the same as that for Μ !!!
We could call H ( r ) the magnetic displacement, in analogy to the electric displacement:
D (r ) = εoE (r ) + Ρ (r )
But usually we just call H “the H -field”.
© Professor Steven Errede, Department of Physics, University of Illinois at Urbana-Champaign, Illinois
2005-2008. All Rights Reserved.
13
UIUC Physics 435 EM Fields & Sources I
Fall Semester, 2007
Lecture Notes 19
Prof. Steven Errede
Ampere’s Law for the H -field (in differential form) then becomes:
1
∇ × H ( r ) = J free ( r ) where:
H (r ) ≡
B (r ) − Μ (r )
μo
Ampere’s Law for the H -field is the analog of Gauss’ Law for the D -field, in differential form:
∇i D ( r ) = ρ free ( r )
D (r ) ≡ εoE (r ) + Ρ (r )
where:
n.b. both H ( r ) and D ( r ) are auxiliary fields, B ( r ) and E ( r ) are fundamental fields.
In integral form, these relations become:
∫
C
1
H ( r )id = I enclosed
free
∫ D ( r )ida = Q
S
∫ B ( r )i d
μ0
C
enclosed
enclosed
= ITot
= I enclosed
+ I Bound
free
enclosed
enclosed
ε o ∫ E ( r )ida = QToT
= Q enclosed
+ QBound
free
enclosed
free
S
We also have the relations:
J Bound ( r ′ ) = ∇ × Μ ( r ′ )
K Bound ( r ′ ) = Μ ( r ′ ) × nˆ
ρ Bound ( r ′ ) = −∇iΡ ( r ′ )
surface
Volume
= ∫ J Bound ( r ′ ) da⊥′
I Bound
S⊥
I
surface
Bound
= ∫ K Bound ( r ′ ) d ′⊥
C⊥
= ∫ J free ( r ′ ) da⊥′
I Volume
free
S⊥
I
Surface
free
= ∫ K free ( r ′ ) d ′⊥
C⊥
σ Bound ( r ′ ) = Ρ ( r ′ )inˆ
surface
Volume
= ∫ ρ Bound ( r ′ ) dτ ′
QBound
v′
Surface
Bound
Q
= ∫ σ Bound ( r ′ ) da′
S′
= ∫ ρ free ( r ′ ) dτ ′
QVolume
free
v′
Q
Surface
free
= ∫ σ free ( r ′ ) da′
S′
And the-time dependent Continuity Equations – separate conservation of bound and free charge:
∇i J free ( r , t ) = −
∂ρ free ( r , t )
∇i J Bound ( r , t ) = −
∂t
∂ρ Bound ( r , t )
∂t
⇐
⇐
Free charge is conserved.
Bound charge is conserved.
n.b. There are actually two
separate bound charge continuity
equations here, because we have
bound charges in dielectric media
and effective bound currents in
magnetic media!
Then using the principle of linear superposition:
J Tot ( r , t ) = J free ( r , t ) + J Bound ( r , t )
⇒ ∇i J Tot ( r , t ) = ∇i J free ( r , t ) + ∇i J Bound ( r , t ) = −
⇒ ∇i J Tot ( r , t ) = −
14
∂ρTot ( r , t )
∂t
⇐
∂ρ free ( r , t )
∂t
−
∂ρ Bound ( r , t )
∂ρ ( r , t )
= − Tot
∂t
∂t
Total charge is conserved.
© Professor Steven Errede, Department of Physics, University of Illinois at Urbana-Champaign, Illinois
2005-2008. All Rights Reserved.
UIUC Physics 435 EM Fields & Sources I
Fall Semester, 2007
Lecture Notes 19
Prof. Steven Errede
Griffiths Example 6.2: A long copper rod of radius R carries a steady, uniformly-distributed
free current I free = I free zˆ with J free = J o free zˆ as shown in the figure below. Determine H ( ρ )
inside and outside the copper rod. Note that copper is weakly diamagnetic, so at the microscopic
level the magnetic dipoles of the copper atoms will align opposite/antiparallel to the magnetic
Volume
field B ~ ϕˆ , resulting in a bound volume current I Bound
running antiparallel to the free current
I Volume
. All currents are longitudinal ( i.e. in the ± zˆ direction ) .
free
2
ρ
J o free = I free π R 2 with I enclosed
( ρ ≤ R ) = I free ⎛⎜ ⎞⎟ where ρ = x 2 + y 2 (in cylindrical coords.)
free
⎝R⎠
zˆ, I free , J free
Use Ampere’s Circuital Law for the H -field:
∫
C
H ( r )id = I enclosed
free
R
1 ρ
I freeϕˆ
2π R 2
1
H outside ( ρ ≥ R ) =
I freeϕˆ
2πρ
H inside ( ρ ≤ R ) =
H (r )
ϑ
ϕ
μo
= I free 2π R
~1 ρ
ρ
ŷ
ϕ̂
ρ̂
x̂
1
~ρ
ρ=R
Note that:
H inside ( ρ = R ) = H outside ( ρ = R )
Now: H ( r ) ≡
H max ( ρ = R )
B ( r ) − Μ ( r ) thus: B ( r ) = μo H ( r ) + Μ ( r )
Then: B outside ( ρ > R ) = μo H outside ( ρ > R ) =
μo
I freeϕˆ
2πρ
( Because Μ
outside
( ρ > R ) ≡ 0)
= same as B outside for non-magnetized wire!
What is B inside ( ρ ≤ R ) ?
(
B inside ( ρ ≤ R ) = μ0 H inside ( ρ ≤ R ) + μ0 Μ ( ρ ≤ R ) = μ0 H inside ( ρ ≤ R ) + Μ ( ρ ≤ R )
)
We don’t (yet) have the “tools” in hand to know/determine Μ ( ρ ≤ R ) - but we will, shortly….
when we have these, we can then determine B inside ( ρ ≤ R ) .
© Professor Steven Errede, Department of Physics, University of Illinois at Urbana-Champaign, Illinois
2005-2008. All Rights Reserved.
15
UIUC Physics 435 EM Fields & Sources I
Fall Semester, 2007
Note that from Ampere’s Circuital Law for the H -field:
Lecture Notes 19
∫
C
Prof. Steven Errede
H ( r )id = I enclosed
free
then we can compute H . This makes H more
This relation says that if we measure I enclosed
free
useful e.g. than D (the electric displacement).
In the “old” days (e.g. 1800’s), it was easier to reliably measure a free current I ( in Amps) than
voltage V ( in Volts). Reliably measuring a current required the use of galvanometer (an early
type of ammeter – which is a very low input impedance device – ideally zero Ohms), whereas
reliably measuring the voltage V (with respect to a local ground) required the use of a voltmeter
with a very high input impedance (ideally infinite Ohms), which was very difficult to achieve
back then! In the “old” days, a good galvanometer was easy to make a good ammeter, but a good
voltmeter was very difficult to make. These days, garden-variety/“vanilla” digital voltmeters
typically have input impedances of ~ 10 Meg-Ohms.
Measuring a current thus enabled the monitoring of the H -field, e.g. for an electro-magnet
(big fields ⇒ big magnet coils ⇒ lots of current!)
The Magnetic Permeability μ and Magnetic Susceptibility χ m of Linear Magnetic Materials
Recall that for linear dielectric materials in electrostatics, that:
D = ε o E + Ρ = ε E where ε is the electric permittivity of the material and ε = ε o (1 + χ e ) .
= ε o (1 + χ e ) E where χ e is the electric susceptibility of the dielectric material.
= ε o E + ε o χe E ⇒ Ρ = ε o χe E .
It would seem reasonable/logical/rational for linear magnetic materials in magnetostatics, that
we could define a magnetic permeability μ and related magnetic susceptibility χ m in a manner
similar to that for how ε and χ e were defined for linear dielectric materials in electrostatics, i.e.:
1
1
H≡
B − Μ = B with μ =μo (1 + χ m ) .
μo
μ
However, the 1 μ factor really messes things up!!! For if H = B μ and we want to have
1
μ =μo (1 + χ m ) then H =
B and mathematically there is no rigorous way to separate
μo (1 + χ m )
the RHS of this relation into two separate pieces that would enable us to relate the magnetization
Μ directly to the magnetic field B , analogous to obtaining the relation Ρ = ε o χ e E for linear
dielectric media.
If χ m
1 then:
1
1
1
1
1
≈ 1 − χ m and then: H ≈
(1 − χ m ) B = B − χ m B = B − Μ
1 + χm
μo
μo
μo
μo
Thus, we see that for χ m
16
1 , that Μ
1
μo
χ m B in analogy to Ρ = ε o χ e E .
© Professor Steven Errede, Department of Physics, University of Illinois at Urbana-Champaign, Illinois
2005-2008. All Rights Reserved.
UIUC Physics 435 EM Fields & Sources I
Fall Semester, 2007
Lecture Notes 19
Prof. Steven Errede
However, there are many linear magnetic materials where μ μo = (1 + χ m )
1 i.e. χ m
1 so
therefore we cannot use this approximation!!! We must do “something” else!!!
We could e.g. re-define the magnetic permeability of free space, μo = 4π ×10−7 Henrys/meter
1
1
=
× 107 meters/Henry (= A2/N),
(=N/A2) in terms of its inverse, e.g. define: ξ o ≡
μo 4π
Then H ≡
1
μo
B − Μ ⇒ H ≡ ξ o B − Μ = ξ B , where ξ is a “new” inverse magnetic permeability
defined such that ξ =ξ o (1 − χ m* ) with “new” magnetic susceptibility χ m* such that
H ≡ ξ o B − Μ = ξ B = ξ o (1 − χ m* ) B = ξ o B − ξ o χ m* B and thus Μ = ξ o χ m* B in analogy to Ρ = ε o χ e E
for linear dielectrics. But note that since ξ ~ 1/ μ , then as (old) μ increases, the
(new) ξ decreases (and vice-versa)! So this approach has some troubles also… see Appendix at
end of this lecture note for a bit more info on this….
However, we shouldn’t get too hung-up on this, because e.g. we have already seen that there
is a vast difference between the nature of the electric field E vs. the nature of the magnetic field
B in terms of how they are specified by their respective divergences and curls, and thus we have
absolutely every reason to believe that there is also a vast difference between the nature of the
two auxiliary fields D and H in terms of how they are specified by their respective divergences
and curls. Hence insisting on (or wanting) “symmetry” between relations associated with E vs.
those for B is illusory. In fact, only the macroscopic matter fields Ρ (the electric polarization /
electric dipole moment per unit volume) and Μ ( the magnetic polarization/magnetic dipole
moment per unit volume) are analogous/similar fields (by deliberate construction on our part)!
What people (Maxwell, et al.) actually did was to start with the auxiliary relation: H ≡
(
Multiply both sides by μo : μo H = B − μo Μ , then rearrange: B = μo H + Μ
)
1
μo
B−Μ
n.b. This latter relation erroneously causes people to (wrongly) think that the H -field is the
fundamental field and therefore that the B -field is the auxiliary field. ⇒ WRONG !!! ⇐
For linear magnetic materials, the magnetic permeability μ can then be defined such that μ
connects H to B via the relation H = B μ (the magnetic analog of D = ε E ).
The magnetic susceptibility can then be defined as: μ ≡ μo (1 + χ m ) paralleling that done for
linear dielectrics: ε ≡ ε o (1 + χ e )
(
)
Then we see that: B = μ H = μo (1 + χ m ) H = μo H + μo χ m H but: B = μo H + Μ = μo H + μo Μ
Then “viola”: Μ = χ m H , which is not analogous to: Ρ = ε o χ e E because we don’t have a direct
relationship between Μ and (the fundamental field) B .
© Professor Steven Errede, Department of Physics, University of Illinois at Urbana-Champaign, Illinois
2005-2008. All Rights Reserved.
17
UIUC Physics 435 EM Fields & Sources I
Fall Semester, 2007
Lecture Notes 19
Prof. Steven Errede
However, since H = B μ then Μ = χ m H = χ m B μ = ⎡⎣ χ m (1 + χ m ) ⎤⎦ B μo .
Now if χ m
1 , then the factor ⎡⎣ χ m (1 + χ m ) ⎤⎦ ≈ χ m , and μ = μo (1 + χ m ) ≈ μo .
Thus: Μ = χ m H ≈ χ m B μ o for χ m
1.
The following table lists the magnetic susceptibilities for a few typical types of diamagnetic and
paramagnetic materials. Note that systematically, χ m 1 for both types of magnetic materials
(except for gadolinium).
In this course, we want to “hang on to” the following:
E ( r ) and B ( r ) are fundamental fields.
D ( r ) and H ( r ) are auxiliary fields associated with the E & M properties of matter.
⎧D ( r ) = ε E ( r ) ⎫
⎪
⎪
For linear dielectrics and linear magnetic materials: ⎨
⎬
1
⎪ H ( r ) = μ B ( r )⎪
⎩
⎭
ε = electric permittivity of matter = K eε o
K e = ε rel ≡
ε
= (1 + χ e )
εo
dielectric “constant”
(a.k.a. relative electric permittivity)
μ = magnetic permeability of matter = K m μo
K m = μrel ≡
μ
= (1 + χ m )
μo
relative magnetic permeability
18
electric susceptibility
magnetic susceptibility
© Professor Steven Errede, Department of Physics, University of Illinois at Urbana-Champaign, Illinois
2005-2008. All Rights Reserved.
UIUC Physics 435 EM Fields & Sources I
Fall Semester, 2007
Lecture Notes 19
Prof. Steven Errede
For Diamagnetic Materials:
χ mdia < 0 ⇒ μ dia = μo (1+ χ mdia ) < μo , K mdia =
μ dia
= (1+ χ mdia ) < 1
μo
For Paramagnetic Materials:
χ μpara > 0 ⇒ μ para = μo (1+ χ mpara ) > μo , K mpara =
μ para
= (1+ χ mpara ) > 1
μo
For Ferromagnetic Materials:
χ mferro 0 but is in fact dependent on past magnetic history of material !!!
A non-linear hystesis-type relation exists between Μ vs. H (and/or Μ vs. B ) for ferromagnetic
materials.
Magnetic materials that obey the relation B = μ H = μo (1 + χ m ) H = μo H + μo Μ ⇒ Μ = χ m H
are known as linear magnetic materials, i.e. μ = the magnetic permeability of the magnetic
material and μ = constant of proportionality between B and H , whereas χ m = magnetic
susceptibility of the magnetic material and χ m = constant of proportionality between Μ and H .
If Bext becomes extremely large, then the relation between B and H , and Μ and H can/does
become non-linear, e.g. B = μ (1 + c2 μ + c3 μ 2 + …) H and Μ = χ m (1 + a2 χ m + a3 χ m2 + …) H
Note that various crystalline magnetic materials are anisotropic, hence: B = μ H and Μ = χ m H
⎛ μ xx μ xy μ xz ⎞
⎜
⎟
μ = ⎜ μ yx μ yy μ yz ⎟
⎜
⎟
⎝ μ zx μ zy μ zz ⎠
m
⎛ χ xxm χ xym χ xxz
⎞
⎜ m m m ⎟
χ m = ⎜ χ yx χ yy χ yz ⎟
⎜ m m m ⎟
⎜ χ zx χ zy χ zz ⎟
⎝
⎠
magnetic
permeability
tensor
magnetic
susceptibility
tensor
Note also that: μij = μ ji and μ xx + μ yy + μ zz = 0 and likewise: χ ijm = χ mji and χ xxm + χ yym + χ zzm = 0 .
© Professor Steven Errede, Department of Physics, University of Illinois at Urbana-Champaign, Illinois
2005-2008. All Rights Reserved.
19
UIUC Physics 435 EM Fields & Sources I
Fall Semester, 2007
Lecture Notes 19
Prof. Steven Errede
We have the Maxwell relation: ∇i B ( r ) = 0 (no magnetic charges/no magnetic monopoles)
and the constitutive relation: H ( r ) =
or:
1
μo
B ( r ) − Μ ( r ) . Then: ∇i H ( r ) =
1
μo
∇ i B ( r ) − ∇ iΜ ( r )
=0
∇i H ( r ) = −∇iΜ ( r ) ⇐ These divergences do not necessarily vanish!!! Often they don’t!
(especially on the surfaces of magnetized materials)
Only when ∇iΜ ( r ) = 0 , does ∇i H ( r ) = 0 (and not vice-versa!!!)
Consider a bar magnet (permanent magnet) with uniform Μ ( r ) ≠ 0 inside, thus B ( r ) ≠ 0 inside
or outside:
S
Μ
N
Consider Ampere’s Circuital Law for H :
∫
C
H ( r )id = I enclosed
free
But: ∃ no free current(s) in a bar magnet – does this mean that H inside ( r ) = H outside ( r ) = 0 !!!???
!!! NONSENSE !!!
Μ ( r ) = Μ o zˆ inside the bar magnet.
B ( r ) for a cylindrical bar magnet = B ( r ) for a short solenoid (w/ no pitch angle).
Lines of B :
B inside is in the same direction as Μ = Μ o zˆ
Outside: H out =
Lines of H :
1
μ0
B out
Inside: H in is in the opposite
direction to Μ !!!
Compare these pix to that for E , D and Ρ for the bar electret – see P435 Lecture Notes 10, p. 33.
20
© Professor Steven Errede, Department of Physics, University of Illinois at Urbana-Champaign, Illinois
2005-2008. All Rights Reserved.
UIUC Physics 435 EM Fields & Sources I
Fall Semester, 2007
Lecture Notes 19
Prof. Steven Errede
Note that since J Bound ( r ) = ∇ × Μ ( r ) and Μ ( r ) = χ m H ( r ) then: J Bound ( r ) = χ m∇ × H ( r ) ,
However: ∇ × H ( r ) = J free ( r ) ⇒ J Bound ( r ) = χ m J free ( r ) .
This relation says that unless a free current actually flows through a linear magnetic material of
susceptibility χ m , with free volume current density J free ( r ) , then (and only then) will there be /
arise a corresponding non-zero equivalent bound volume current density J Bound ( r ) which is
related to J free ( r ) via J Bound ( r ) = χ m J free ( r ) . This is analogous to the relationship that we found
⎛
1 ⎞
between ρ Bound ( r ) and ρ free ( r ) for linear dielectric materials: ρ Bound ( r ) = − ⎜1 −
⎟ ρ free ( r )
⎝ Ke ⎠
{See P435 Lecture Notes 10, page 21}. If J free ( r ) = 0 inside a magnetic material, then
J bound ( r ) = 0 inside the magnetic material, also. In this situation, any/all non-zero effective
bound currents can only exist on the surfaces of the magnetic material!!!
MAGNETOSTATIC BOUNDARY CONDITIONS FOR MAGNETIC MEDIA
⊥ = normal (i.e. perpendicular) component
relative to plane of interface
= parallel component relative to plane of
interface (tangential component)
From ∇i B ( r ) = 0 (no magnetic charges/no monopoles) in integral form:
ˆ =0.
∫ B ( r )inda
S
Use a Gaussian pillbox for the enclosing surface S, vertically centered on the interface between
the two magnetic media. We then shrink the height of pillbox to infinitesimally above/below the
interface – then only the top/bottom portions of the surface integral will contribute anything.
We thus obtain a condition on the perpendicular components of B ( r ) above/below interface:
B2⊥above ( r )
surface
= B1⊥above ( r )
surface
We also have the constitutive relation: B ( r ) μo = H ( r ) + Μ ( r ) and thus ∇i B ( r ) = 0 ⇒
∇i H ( r ) = −∇iΜ ( r ) . In integral form this relation becomes:
∫
S
ˆ = − ∫ Μ ( r )inda
ˆ .
H ( r )inda
S
Using the same Gaussian pillbox, we obtain the following condition on the perpendicular
components of H ( r ) and Μ ( r ) above/below interface:
© Professor Steven Errede, Department of Physics, University of Illinois at Urbana-Champaign, Illinois
2005-2008. All Rights Reserved.
21
UIUC Physics 435 EM Fields & Sources I
Fall Semester, 2007
Lecture Notes 19
Prof. Steven Errede
⎡⎣ H 2⊥above ( r ) − H1⊥above ( r ) ⎤⎦
= − ⎡⎣Μ ⊥2 above ( r ) − Μ1⊥below ( r ) ⎤⎦
surface
surface
Ampere’s Law for B ( r ) is: ∇ × B ( r ) = μo J Tot ( r ) , with J Tot ( r ) = J free ( r ) + J Bound ( r ) which
in integral form becomes:
∫ B ( r )i d
C
enclosed
enclosed
enclosed
= μo ITot
= I enclosed
+ I Bound
, with ITot
. We can take
free
a (rectangular) contour vertically centered above/below the interface between the two magnetic
media; we then shrink the height of this contour to be infinitesimally above/below the interface,
thus only the tangential portions of the line integral above/below the interface will contribute.
We obtain the following condition on the tangential components of B ( r ) above / below the
interface, where KTot ( r ) = K free ( r ) + K Bound ( r ) and n̂ is shown in the figure above:
1 ⎡ above
B
( r ) − B1 below ( r ) ⎤⎦ surface = KTot ( r ) surface
μ ⎣ 2
o
We can write this more compactly/succinctly in vector form as:
1
⎡⎣ B2above ( r ) − B1below ( r ) ⎤⎦
= KTot ( r ) × nˆ
surface
surface
μo
Since B ( r ) = ∇ × A ( r ) , this relation can also be equivalently written as:
above
∂A1below ( r ) ⎤
1 ⎡ ∂A2 ( r )
−
= − KTot ( r )
⎢
⎥
surface
μo ⎢⎣
∂n
∂n
⎥⎦ surface
Similarly, Ampere’s Law for H ( r ) is: ∇ × H ( r ) = J free ( r ) which in integral form becomes:
∫
C
H ( r )id = I enclosed
. Again, we can take a (rectangular) contour vertically centered above /
free
below the interface between the two magnetic media; we then shrink the height of this contour to
be infinitesimally above/below the interface, thus only the tangential portions of the line integral
above/below the interface will contribute. We obtain the following condition on the tangential
= K free ( r )
components of H ( r ) above/below the interface: ⎡⎣ H 2above ( r ) − H1 below ( r ) ⎤⎦
surface
surface
which can also be written compactly/succinctly in vector form as:
⎡ H 2above ( r ) − H1below ( r ) ⎤
⎣
⎦ surface = K free ( r ) × nˆ surface
Since B ( r ) = μ H ( r ) or: H ( r ) = B ( r ) μ and B ( r ) = ∇ × A ( r ) , this relation can also be
equivalently written as:
⎡⎛ 1 ⎞ ∂A2above ( r ) ⎛ 1 ⎞ ∂A1below ( r ) ⎤
− ⎜ ⎟
= − K free ( r )
⎢⎜ ⎟
⎥
surface
∂n
∂n
⎝ μ1 ⎠
⎣⎢⎝ μ2 ⎠
⎦⎥ surface
22
© Professor Steven Errede, Department of Physics, University of Illinois at Urbana-Champaign, Illinois
2005-2008. All Rights Reserved.
UIUC Physics 435 EM Fields & Sources I
Fall Semester, 2007
Lecture Notes 19
Prof. Steven Errede
Appendix:
If we wanted to/needed to define the macroscopic magnetization Μ (auxiliary macroscopic
matter field) in terms of the fundamental field B , in analogy to Ρ ( r ) = ε o χ e E ( r ) . We have seen
(above) that given the constitutive relation H ( r ) = B ( r ) μo − Μ ( r ) we are unable to do so.
The problem here actually focuses squarely on μo , the magnetic permeability of free space:
Note that μo is actually derived/defined from: c 2 =
1
ε o μo
⇒ μo ≡
1
ε oc2
The electric permittivity of free space is ε o = 8.85 ×10−12 Farads/meter. The Farad is the SI unit
of capacitance, C (in electrostatics) – the ability of something (in this case, the vacuum) to store
energy in the electric field of that something. Note that ε o has the dimensions of capacitance/unit
length – Farads/meter.
The numerical value of the magnetic permittivity of free space μo is defined from the
experimental measurement of c = 3 × 108 m s (speed of light in free space) and the electric
permittivity of free space ε o = 8.85 ×10−12 Farads/meter, thus:
μo ≡ 4π × 10−7 Newtons/Ampere2 = (kg-meter/sec2)/Ampere2 = Henrys/meter
{1 Newton/ Ampere2 = 1 Henry = 1 Tesla-m2/Ampere = 1 Weber/Ampere}
The Henry is the SI unit of inductance, L (in magnetostatics) – the ability of something (in this
case, the vacuum) to store energy in the magnetic field of that something. Note that μo has the
dimensions of inductance/unit length – Henrys/meter.
107
2
1
However, if we alternatively define ξ o ≡
μo = 4π Amperes /Newton = meters/Henry,
Then ξ o = inverse magnetic permeability (magnetic “reluctance”??) of free space.
Then: c 2 =
ξo
εo
or: ξ o = c 2ε o
Then the magnetic constitutive relation becomes: H =
1
μo
B−M
⇒ H = ξ o B − M in analogy
to D = ε o E + Ρ and we also have (for linear materials) H = ξ B in analogy to D = ε E .
However, here we will define ξ ≡ ξ o (1 − χ m* ) in contrast to μ ≡ μo (1 + χ m ) .
Then: H ≡ ξ o B − Μ = ξ B = ξ o (1 − χ m* ) B = ξ o B − ξ o χ m* B and thus Μ = ξ o χ m* B in analogy to
Ρ = ε o χ e E for linear dielectrics.
Since: Μ = χ m H = χ m B μ = ⎡⎣ χ m (1 + χ m ) ⎤⎦ B μo we see that ξ o χ m* = χ m (1 + χ m ) μo
or:
χ m* = χ m (1 + χ m ) .
© Professor Steven Errede, Department of Physics, University of Illinois at Urbana-Champaign, Illinois
2005-2008. All Rights Reserved.
23