Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Hydrogen atom wikipedia , lookup
Perturbation theory (quantum mechanics) wikipedia , lookup
Coherent states wikipedia , lookup
Asymptotic safety in quantum gravity wikipedia , lookup
Interpretations of quantum mechanics wikipedia , lookup
Density matrix wikipedia , lookup
Quantum electrodynamics wikipedia , lookup
Dirac equation wikipedia , lookup
Self-adjoint operator wikipedia , lookup
Quantum chromodynamics wikipedia , lookup
Orchestrated objective reduction wikipedia , lookup
Bell's theorem wikipedia , lookup
EPR paradox wikipedia , lookup
Quantum field theory wikipedia , lookup
Bra–ket notation wikipedia , lookup
Quantum group wikipedia , lookup
BRST quantization wikipedia , lookup
Renormalization wikipedia , lookup
Quantum state wikipedia , lookup
Yang–Mills theory wikipedia , lookup
Renormalization group wikipedia , lookup
Hidden variable theory wikipedia , lookup
Path integral formulation wikipedia , lookup
Molecular Hamiltonian wikipedia , lookup
Relativistic quantum mechanics wikipedia , lookup
History of quantum field theory wikipedia , lookup
Topological quantum field theory wikipedia , lookup
Dirac bracket wikipedia , lookup
Symmetry in quantum mechanics wikipedia , lookup
Scalar field theory wikipedia , lookup
Imperial College London
Blackett Laboratory
Department of Theoretical Physics
MSc in Quantum Fields and Fundamental Forces
Dissertation
Loop Quantum Gravity
and Its Consistency
Author:
Jonathan En Ze Lee
CID:00748701
Supervisor:
Professor Joao Magueijo
September 16, 2016
Submitted in partial fulfilment of the requirements for the degree of
Master of Science of Imperial College London
Abstract
In this dissertation, the Hamiltonian formulation of Loop Quantum Gravity is discussed and its consistency examined. Beginning with General Relativity, the Hamiltonian approach to General Relativity is reproduced and
scrutinized, and then quantised. This quantisation gives us Loop Quantum Gravity. Its implementation and structure are then studied without
matter content. Coupling of matter to the theory is later briefly examined. Finally, certain aspects of the consistency of the theory are examined
in detail. The analysis starts off by looking at certain problems with the
Hamiltonian constraint, and then proceeds to examine the familiar problem
of fermion doubling.
i
Acknowledgements
I would like to thank my supervisor Professor Joao Magueijo for taking the
time to mentor me despite his schedule. I am very grateful for all answers
to the numerous questions I have had, as well as for the general guidance
during these few months
ii
“In general we look for a new law by the following process. First we
guess it. Then we compute the consequences of the guess to see what would
be implied if this law that we guessed is right. Then we compare the result
of the computation to nature, with experiment or experience, compare it
directly with observation, to see if it works. If it disagrees with experiment
it is wrong. In that simple statement is the key to science. It does not make
any difference how beautiful your guess is. It does not make any difference
how smart you are, who made the guess, or what his name is – if it disagrees
with experiment it is wrong. That is all there is to it.”
-Richard Feynman,
‘The Character of Physical Law’, Chapter 7: Seeking New Laws
iii
Contents
1 Introduction
1
2 Recasting of General Relativity
4
2.1 ADM Formulation of the EH Action . . . . . . . . . . . . . .
4
2.2 Hamiltonian General Relativity . . . . . . . . . . . . . . . . .
6
2.3 Connections and the Asktekar Variables . . . . . . . . . . . .
9
2.3.1 The Barbero-Immirzi Variable and the New Connection 11
3 Loop Quantum Gravity
3.1 Quantisation . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2 The Kinematic Hilbert Space . . . . . . . . . . . . . . . . .
3.3 Applying the Gauge and Diffeomorhpism Constraints . . . .
3.3.1 SU (2) Gauge Invariance and the Spin Network Basis
3.3.2 The Spatial Diffeomorphism Constraint . . . . . . .
3.4 The Area and Volume Operators . . . . . . . . . . . . . . .
3.4.1 The Area Operator . . . . . . . . . . . . . . . . . . .
3.4.2 The Volume Operator . . . . . . . . . . . . . . . . .
3.5 The Physical Significance of Spin Networks and Knot States
3.6 The Hamiltonian Constraint . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
13
13
16
19
19
23
25
27
29
31
32
4 Matter Coupling in Loop Quantum
4.1 Yang-Mills Theory . . . . . . . . .
4.2 Fermions Coupling . . . . . . . . .
4.3 Scalar Coupling . . . . . . . . . . .
4.4 States in Matter Coupling . . . . .
.
.
.
.
38
38
39
39
40
5 The
5.1
5.2
5.3
Gravity
. . . . . .
. . . . . .
. . . . . .
. . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Hamiltonian and its Problems
42
Locality and the Hamiltonian . . . . . . . . . . . . . . . . . . 43
Closure of the Quantum Algebra . . . . . . . . . . . . . . . . 44
An Alternative: The Master Constraint . . . . . . . . . . . . 46
6 Fermion Doubling in LQG
6.1 In Lattice Gauge Theory . . . . . . . . .
6.1.1 Scalar Field Theory on a Lattice
6.1.2 Fermions on a Lattice . . . . . .
6.1.3 Fermion Doubling . . . . . . . .
6.2 In Loop Quantum Gravity . . . . . . . .
6.3 Possible Resolutions . . . . . . . . . . .
7 Conclusion
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
49
49
49
51
53
54
59
61
iv
1
Introduction
Many of the advances in physics since the early 20th century have been propelled by two theories: General Relativity and Quantum Mechanics. From
their inception, both these branches of physics revolutionised scientific thinking and brought about radical (at that time) new moves away from classical
physics.
Newtonian mechanics clearly defines space and time as two different independent and immutable entities against which measurements about matter
in a system under consideration are made. As such, the universe, as defined
by classical (Newtonian) mechanics, is fully deterministic. That is to say, if
we knew the initial conditions for the universe we could predict what would
happen at a given time.
With the introduction of Special Relativity, we have had to abandon the
idea that space and time are separate. Instead a single entity ‘spacetime’ is
considered and there is no preferred variable for time. Depending on one’s
frame of reference, the passage of time can be different, and there is no
general notion of simultaneity. General Relativity then took this further
by saying that spacetime is not some background upon which everything
else lives. Rather, spacetime is actually nothing more than the gravitational
field and we must treat it dynamically. Background independence enters
once we realise that the matter fields no longer live on Minkowski spacetime
but rather the matter and gravitational fields live on one another! It also
means we can no longer consider time as being ‘external’ to the dynamical
fields as with special relativity, and a time t which is globally observable
does not appear in General Relativity.
Quantum Mechanics starts off by describing all matter as being both
particles and waves. It then goes on to describe systems as wavefunctions
in a superposition of physical states, which collapses into a single state
under observation. Over the past few decades, Quantum mechanics has
been combined with Special Relativity to give us quantum field theory, and
thus the standard model which has worked extraordinarily well. Quantum
field theory has given us many predictions which have been observed, making
it an extremely successful theory. However, it is still background dependent
since it is a pertubation theory that uses the Minkowski spacetime as the
background.
Each theory, taken individually, falls short in its own way since one does
not incorporate the other. It is hoped that, by combining the two into a
single theory of quantum gravity, we might be able to resolve many of the
numerous problems which are currently outstanding. It is possible to split
the approaches to quantum gravity into two main branches: pertubative and
non-pertubative. The most prominent of the theories is string theory, which
is pertubative. String theory proposes that particles are not points but onedimensional extended objects and with pertubation being performed on a
1
Minkowski spacetime background. For non-pertubative theories, the key is
that background independence is an immutable fact, and so it is the starting
point. Such theories include Causal Dynamical Triangualation, Causal Set
Theory and Non-Commutative Geometry, among others. The focus of this
dissertation, however, will be on Loop Quantum Gravity.
The main idea behind Loop Quantum Gravity is to quantise General
Relativity. We begin by separating general spacetime manifolds in a 3 × 1
manner so that d4 x → dtd3 x. This requires the Einstein-Hilbert action to
be rewritten so that it is expressed as a product manifold. Once this is
done, the next step is to move on to a Hamiltonian formulation for General
Relativity from the Langrangian formalism. Upon doing so, we end up
with constraints, and find that Hamiltonian General Relativity is a fully
constrained system. The configuration variable of this system is the spatial
part of the metric. This system gives us two constraints which generate
spatial diffeomorphism and time translations when we take their poisson
bracket with the phase space variables. The variables of the hypersurface
metric and its conjugate momenta, however, are not ideal for quantisation,
and the connection of the theory was found to be better for such a task.
By using the connection instead as the configuration variable of the system,
General Relativity can now be re-expressed as a gauge theory much like
in the fashion of field theories. This re-expression also gives us a third
constraint, the Gauss constraint since the connection has more degrees of
freedom than the spatial metric.
In order now to quantise this theory, the variables are promoted to operators that act on wavefunctions and the poisson brackets become commutation relations between these operators. Unfortunately, if you simply
promote the connection and its conjugate momentum to operators in that
fashion, they take a wavefunction out of the kinematic state space. Therefore, the holonomy (parallel propagator) of the connection along curves is
preferred as it keeps the wavefunction it acts on within the Hilbert space.
Its conjugate momentum is then defined as the ‘Electric flux’ integrated
across a surface, so that when taking the commutator of the holonomy and
its conjugate, you get a non-distributional result. The usage of holonomy as
the basic variable of the theory is where the name Loop Quantum Gravity
was derived. The Gaussian constraint and spatial diffeomorphism constraint
are applied in order to find the space of states that are SU (2) and spatially
diffeomorphism invariant.
It is then possible to construct area and volume operators for the theory from the classical expressions but they must be regulated appropriately.
Upon examination of these operators, they are found to have the spin networks (states of LQG) as eigenvectors and give a discrete spectrum of eigenvalues! Area and volume of space have been derived to be quantised in,
Loop Quantum Gravity, instead of assumed.
The remaining constraint, the generator of time translation, is often
2
called the Hamiltonian Constraint as it determines the dynamics of the
system. In order to quantise it, this constraint must be regularised much
like the area and volume operators. There is much ambiguity in the quantum
form of the Hamiltonian Constraint due to the way it is defined. As such,
its action is not always straightforward to state, although a ‘naive’ version
of its action will be presented later.
Having outlined the theory, it must be consistent with already established physics. Any theory of quantum gravity cannot violate the theories
that have preceded it when the previous theories have already been backed
up by volumes of experimental evidence.
One of the problems encountered involves the commutators of the constraints in the quantum theory. In the classical theory, spacetime covariance
is recovered via the algebra of the constraints when scrutinising their poisson
brackets. When moving to the quantum theory, examining the constraint
algebra is not as simple due to a few obstacles. It is then necessary to
say that the algebra closes in a ‘weaker’ fashion than usual. This weaker
notion of closure then brings into question the recovery of full spacetime
diffeomorphism group.
Another problem that is encountered is fermion doubling. It was a problem that was first encountered in Lattice Gauge Theory and extends to
Loop Quantum Gravity. The mathematical origin of the problem is that,
when looking at the propagator of the free Dirac theory, the introduction of
lattice momentum doubles the number of fermions in the theory (for each
dimension that is put on the lattice). This is noted by the fact that the
lattice propagator has an inappropriate number of singularities (and thus
particles). Since this is not seen in reality, it can be considered to be inconsistent. Potential solutions can be pulled from those that have been in use
by Lattice Gauge Theory although there may be alternative formulations of
Loop Quantum Gravity that avoid this problem altogether.
There exist other concerns about the consistency of Loop Quantum
Gravity with known physics besides these two main areas that will be covered
here. Problems with consistency are an important area to pursue. Hopefully
research in this area will either eventually allow Loop Quantum Gravity to
be considered a viable theory for quantum gravity with observations to be
proven by experiment, or to be shown as inconsistent and therefore allowing
researchers to look into more fruitful theories.
3
2
2.1
Recasting of General Relativity
ADM Formulation of the EH Action
In desiring to quantise Einstein’s general relativity in a Hamiltonian manner,
the action must first be cast in a form that allows us to reach a canonical
formulation. The first step in this direction has beeen done by Richard
Arnowitt, Stanley Deser and Charles W. Misner, and the resulting action
was called the ADM action [1]. In moving to this formalism, we need to
assume the manifold M as being globally hyperbolic,1 which allows for a
foliation of the manifold into a one-parameter family of hypersurfaces. This
means that the manifold can be thought of as the product manifold (R × Σ),
where Σ is a generic 3-dimensional manifold, and we take the real line to be
our ‘time direction’. By doing this, one might worry that general covariance
is broken by the separation time and space in this manner, and that some of
the content of general relativity is lost. However, we later see that general
covariance is in fact still present in the classical theory within this new
Hamiltonian formulation.2
The starting point is the Einstein-Hilbert action (1), which needs to be
altered to reflect this decomposition so that we can move to the Hamiltonian
formulation(κ = 16πG and set c = 1). This action is equivalent (by variation
of the metric) to the vacuum Einstein equations and, if you desire to add
matter content, you could add relevant terms to the action. A temporary
distinction will be made between the Ricci scalar for the full manifold R(M)
and the Ricci scalar of the surface Σ which is R(Σ) . [2]
Z
p
1
S=
d4 x |det(g)|R(M)
(1)
κ M
The decomposition of the full manifold means that it can be foliated into
a family of hypersurfaces Σt labelled by the value t along the real line. We
can then define the embedding of these surfaces as3 xµt = xµt (y a ) := xµ (t, y a ),
where xµ are the coordinates of M, y a are the coordinates of Σt , and the t
labels of xµt differentiate the embedding for different surfaces. The foliation
is defined to be arbitary as we see that this freedom in foliation is equivalent
to the diffeomorphism group Dif f (M), since the action is not changed by
the foliation.[2] We can represent an arbitrary foliation of the manifold by
defining the deformation vector field as shown below.
1
The assumption that we have a globally hyperbolic manifold works while we are still
considering the classical theory. However the assumption is not true for the quantum
theory as topology changes are possible, but this is not a hindrance to the construction
of the theory. For more details on this specific topic, see T.Thiemann’s book [2] and the
relevant references it gives.
2
In general you would need to add boundary terms to (1) but for simplicity this is not
done here, [2] has more information.
3
a, b, c, ... = 1, 2, 3 are the spatial indices and µ, ν... = 0, 1, 2, 3 are the spacetime indices.
4
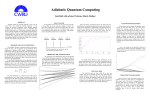
Figure 1: The foliation of spacetime and the deformation field. Source: [2]
µ
T (x) :=
∂xµ (t, y)
∂t
= N (x)nµ (x) + N µ (x)
(2)
|x=x(t,y)
nµ is the normal to the hypersurface, the shift N µ lies tangent to the
surface and the lapse N is the constant of proportionality of the normal.
Figure (1) displays the situation described by these vectors. nµ therefore is
determined by the requirements that gµν nµ nν = 0 and gµν nµ xν,a . We start
with the first and second fundamental form of Σt , which are qµν and Kµν
respectively. The first fundamental form helps to define the metric on the
surface while the second fundamental form is the extrinsic curvature of the
surface.
qµν (x) := gµν + nµ nν
(3)
Kµν (x) := qµρ qνσ 5ρ nσ
(4)
R(M) = R(Σ) + [K µν Kµν − K 2 ] − 2 5µ (nν 5ν nµ − nµ 5ν nν )
(5)
These are used to express R(M) in terms of R(Σ) in what is called the
Codazzi equation (5).[2] We then pull back these quantities onto the hypersurface. The pull back of the volume form Ω(x) gives us the equation (8).
We define the extrinsic curvature Kab of Σ in equation (7) and the pullback
of the metric on Σ in equation (6). To do the full calculation of then taking
5
the Einstein Hilbert action and putting it in the terms of Σ is relatively long
and can be found in [2], where the preceding equations are derived. After
the calculation, one arrives at the ADM action shown below (9).
qab (t, y) := xµ,a xν,b qµν (x(t, y)) = gµν (x(t, y))xµ,a (t, y)xν,b (t, y)
Kab (t, y) := xµ,a xν,b Kµν (x(t, y)) = xµ,a xν,b 5µ nν (t, y)
Ω(x) :=
1
S=
κ
2.2
p
p
|det(g)|d4 x → | − N 2 det(q)|dtd3 y
Z
Z
d3 y
dt
R
p
N 2 det(q)(RΣ + [K ab Kab − (Kaa )2 ])
(6)
(7)
(8)
(9)
Σ
Hamiltonian General Relativity
We now want to find a canonical pair for general relativity, so that we can
cast it in a Hamiltonian manner. The configuration variables are given as
qab (t, y), N (t, y) and N a (t, y), and we now seek their conjugate momenta.
In doing so we see that, since the action lacks the time derivation of the
latter two, we have only one conjugate momentum and two constraints. Let
Π and Πa be the momenta of N and N a while C and Ca are the treatment
of these momenta as constraints.
P ab (t, y) :=
δS
1p
= sign(N )
det(q)[K ab − q ab (Kcc )]
δ qab
˙ (t, y)
κ
C(t, y) := Π =
Ca (t, y) := Πa =
(10)
δS
=0
δ Ṅ (t, y)
(11)
δS
=0
a
˙
δ N (t, y)
(12)
In accordance with Dirac’s treatment of constrained systems [3], these
constraints are known as primary constraints and they are first class. The
Lagrange multipliers λ and λa and introduced for these primary constraints.
We then cast the action in to the form in (13) via a Legendre transform.
ab
a
~
˙
S=
dt d y qab
˙ (P, q, N, N )P + Ṅ Π + N Πa − qab
˙ P ab + λC + λa Ca
R
Σ
1p 2
~)
−
N det(q)(Rσ + [K ab Kab − (Kaa )2 ])(P, q, N, N
(13)
κ
Z
Z
3
6
a
a
a
˙
S=
dt d y qab
˙ P + Ṅ Π + N Πa − λC + λ Ca + N Ha + |N |H
ZR ZΣ
3
ab
a
˙
:=
dt d y qab
˙ P + Ṅ Π + N Πa − κH
(14)
Z
Z
R
3
ab
Σ
The term H is what would normally be called the Hamiltonian, and is
composed by the primary constraints plus two extra terms, Ha and H. The
~
smearing Rof these terms can be defined
R 3 fora arbitrary functions f and f as
3
~ f~) :=
C(f ) := Σ d y f C and C(
Σ d y f Ca . We then want to take the
~ f~), H} and {C(f ), H} to ensure that they are equal to
poisson brackets {C(
zero. This is not a given (as per Dirac) and the constraints are applied only
after the brackets have been taken. It is indeed the case that they are not
equal to zero, but give the equations (15).
~ f~), H} = H(
~ f~)
{C(
N
{C(f ), H} = H
f
|N |
(15)
The terms Ha and H are then called the secondary constraints, since
for any f and f~ the equations (15) must be equal to zero. They are still
~ f~) the spatial diffeomorphism
considered first class
We call H(
constraints.
N
constraint while H |N
| f is called the Hamiltonian constraint. Once again,
it is necessary to check the poisson brackets of the secondary constraints.
They give the poisson bracket (16) and can be cast as the constraint algebra
in the form of a Dirac algebra.(17)
~ f~)} = H(L
~ ~ f~) − H(L ~|N |)
{H, H(
N
f
~ N
~ (|N |, f, q)
{H, H(f )} = H(LN~ f ) + H(
(16)
~ f~)), H(~
~ g )} = −κH(L
~ ~~g )
{H(
f
~ f~), H(f )} = −κH(L ~f )
{H(
f
~ N
~ (f, g, q))
{H(f ), H(g)} = −κH(
(17)
~ do not contribute to the equations
Noting that the constraints4 C and C
of motion, we arrive at what is called the canonical ADM action (18).[2]
4
Examining the equations of motion for the shift and Lapse from (14), we find Ṅ a = λa
and Ṅ = λ. It follows that ,“Since λa , λ are arbitrary, unspecified functions we see that
also the trajectory of lapse and shift is completely arbitrary.” [2]
7
The naive Hamiltonian H is once again the term in the square brackets and
consists of only the linear combination of secondary constraints.
Z
Z
1
(18)
dt d3 y{q̇ab P ab − [N a Ha + |N |H]}
S=
κ R
Σ
~ N
~ ), qab } = κ(L ~ q)ab
{H(
N
{H(|N |), qab } = κ(LN n q)ab
(19)
~ N
~ ), P ab } = κ(L ~ P )ab
{H(
N
µν N H
p
q
(M)
{H(|N |), P µν } =
− N det(q)[q µρ q νσ − q µν q ρσ ]Rρσ
+ (LN n P )µν
2
(20)
To show that these generate spatial diffeomorphism and time translations, first take their Poisson bracket with the pulled-back metric qab . Fol~ leads to
lowing source [2], we get the results (19) which indeed show that H
spatial diffeomorphisms, while H gives diffeomorphisms orthogonal to the
spatial surface. (L~a [ ] is the Lie derivative of [ ] with respect to ~a) If we
attempt this for the conjugate momentum, we arrive at the same conclusion
~ However for H, we see that it can only be interpreted as the genfor H.
erator in the direction orthogonal to the hypersurfaces once we apply the
constraints where the vacuum equations motion are true.5 Thus for any tensor tab built from these canonical variables qab and P ab , if the equations of
motion hold, Ha generates a flow along the spatial direction that preserves
the foliation of M while H generates a flow in the direction orthogonal to
the hypersurfaces.
The question that is still open is whether or not we recovered the group
Dif f (M). It is apparent that we still at least have diffeomorphism invariance for the hypersurface Σ, thanks to the spatial diffeomorphism constraint.
What we need is for the constraint algebra to be a Lie algebra that returns
Dif f (M) to us. Unfortunately this would not seem to be the case. While
the first two poisson brackets of (17) between the constraints are closed
without involving the phase space, the poisson bracket of the Hamiltonian
constraint instead returns with what is called a structure function instead of
a structure constant since it involves the metric q. Therefore, the constraint
algebra is not a Lie algebra! Instead it is what is known as a Dirac algebra.
How then is covariance recovered for this situation? Papers by Bergmann
and Komar have analysed such groups.6 Let such groups be D(M). We see
that if we restrict ourselves to the solutions (equations of motion), D(M) =
Dif f (M). Only when we go ‘off-shell’ do these two groups differ, but in
the classical general relativity this does not come into play. The inherent
5
6
M
The vacuum equations of motion: Rµν
− 21 RM gµν = 0
See [2] for more details.
8
presence of this difference is because the Dif f (M) group is related to the
kinematical symmetry and does not care about the Lagrangian, while D(M)
is related to the dynamical symmetry and therefore would be sensitive to
the Lagrangian’s form. This is therefore the reason that the two match
under the equations of motion, and thus we confirm that general covariance
is still present within the canonical formulation of classical general relativity.
([4],[2])
The answer however, is not so easy once we get into the quantisation of
Hamiltonian general relativity, as the question of closure of the constraint
algebra is called into question. It is represents one of the outstanding open
problems within Loop Quantum Gravity and will be revisited in Chapter 5.
2.3
Connections and the Asktekar Variables
At this point, while we have general relativity in a canonical form, the variables that appear in the previous section did not allow for much progress in
quantisation to be made. The main problem in using such variables lie with
quantising the Hamiltonian constraint as it eludes a ‘simple’ interpretation,
unlike the diffeomorphism constraint.7 Quantisation of the Hamiltonian
constraint needs to be done directly and such a task was not completed in
a general sense. The inability to define an inner product and observables
for the quantum theory meant that this line of research had reached a dead
end.[5] 8
In 1986 A. Ashtekar introduced new canonical variables that allowed for
quantisation of the theory, and it is these variables that will be covered in this
section. While the new variables were introduced in a spinorial formulation,
this section will introduce the new variables using the triads instead in order
to simplify things. ([6],[2])
Z
G(Λ) :=
qab := eja ekb δjk
(21)
j j
Gab := K[a
eb] = 0
(22)
d3 xΛjk Kaj Eka ;
Gj = jkl Kak Ela
(23)
σ
We first move to the local frame fields in 3-dimensions, so that the noncoordinate basis is defined using co-dreibeins eia as in (21). (Let the indices
i,j...=1,2,3) These new indices carry the representation of so(3) and the
7
Application of the diffeomorphism constraint can be simplified as just a requirement
that wavefunctions are invariant under spatial diffeomorphisms.
8
A slightly clearer explanation of the difficulties encountered can be found in [2] and
[5] although it is a focus of neither book.
9
metric is by definition invariant under such transformations. As the CartanKilling metric for this group is just the identity matrix, up/down placing of
the (i,j,k) indices does not matter. Using the dreibeins, we can define the
i ei , and can define the
extrinsic curvature using the new indices as Kab = K(a
b)
new constraint (22) as simply the fact that Kab , by definition, is symmetric.
We can also rewrite it using the densitised Triad Eia = det(q)eai
and
a
a
replacing ei with Ei .
In fact using these, we can define an extended phase space (Kai , Eia ). By
using the constraint (22), we get back ADM phase space. The proof involves
the rotational constraint (23) where Λjk is an antisymmetric matrix and it
is a scalar that takes values in so(3). ((22) can equally be expressed as (23))
Writing qab and P ab as functions of Eia and Kai , we then can check that
their poission brackets are reduced to the correct results after applying the
constraints. [2]
Da vj = ∂a vj + Γajk v k
(24)
Da ejb = ∂a ejb − Γcab ejc + Γajk ekb = 0
(25)
Γajk = −ebk [∂a ejb − Γcab ejc ]
(26)
Examining the action of the (metric compatible) covariant derivative on
the tensors, it can be found that it’s action on a tensor with so(3) indices can
be defined as (24), where Γajk is the spin connection and can be defined from
the Levi-Civita connection as (26) . Also note that the covariant derivative
acting on the triad gives zero (25). This also applies for the densitised triad.
Gjk = (∂a E a + [Aa , E a ])jk
(27)
Gj = jkl Kak Ela
a
Ej
= Da
+ jkl Kak Ela
γ
a
h
i Ea
Ej
l := (γ) a(γ)
+ jkl Γka + γKak
Da Ej
= ∂a
γ
γ
(28)
:= Γja + γKaj
Aj(γ)
a
(30)
Da(γ) vj := ∂a vl + jkl Aak(γ) vl ;
Da(γ) ub := Da ub
(29)
(31)
In order to express the rotation constraint as the Gauss constraint of a
gauge theory, we want to have (27) for some potential field A. Before this is
10
done however, observe that a canonical rescaling of the pair (Kai , Eia ) can be
Ea
i(γ)
a(γ)
done as (γKai , γi ) := (Ka , Ei ). Using the (28) expression of the rotational constraint combined with (25), and the recognizing Levi-Civita tensor
as the generator of SO(3), we get (29). Therefore it is possible to identify
the potential field A as the combination of the Levi-Civita connection and
the extrinsic curvature (30). The free parameter γ is called the ImmirziBarbero variable. The full name of this new connection A can be given
as the Sen-Ashtekar-Immirzi-Barbero connection. This connection defines
a new covariant derivative which acts as (31) on tensors with so(3) indices,
and tensors with spatial indices respectively.
j(γ)
Fab
j
= Rab
+ 2γD[a Kb]j + γ 2 jkl Kak Kbl
(32)
k vl ,
Introducing the field strength tensor Fabjl v l = [Da , Db ]vj = jkl Fab
which is the the curvature given the connection A, and using Rabjl v l =
k v l we can express the field strength as (32).
[Da , Db ]vj = jkl Rab
Ha0 = Ha + faj Gj
H 0 = H + f j Gj
(33)
a(γ)
Gj = Da(γ) Ej
j(γ)
b(γ)
Ha = Fab Ej
j(γ)
H = [Fab
1
S=
κ
Z
Z
dt
R
Σ
jkl E a E b
− (γ 2 + 1)jmn Kam Kbn ] p k l
|det(q)|
a(γ)
d3 y{Ȧi(γ)
a Ei
− [Λj Gj + N a Ha + |N |H]}
(34)
(35)
Turning now to the Gauss, Diffeomorphism and Hamiltonian constraints,
it can be found that the expression of the Hamiltonian and Diffeomorphism
constraints contain pieces which are proportional to the Gauss constraint in
the manner shown in (33). Considering that moving from the old variables
i(γ)
a(γ)
(Kai , Eia ) to the new ones (Aa , Ei ) is a canonical transformation, and
following the reasoning in [2] we see that it is equivalent to work with the
constraints redefined as (34). H and Ha no longer have pieces proportional
to Gj . Finally, using these constraints and the new canonical variables we
can finally write the Einstein Hilbert action as (35).
2.3.1
The Barbero-Immirzi Variable and the New Connection
Ashtekar originally chose to set γ = ±i keeping in mind that this would
greatly simplify the Hamiltonian Constraint by p
eliminating the second term
and thus making it polynomial after a factor of det(q) has been multiplied
11
out. Unfortunately, what then occurs is that it becomes necessary to enforce
reality conditions (36), as the theory only should have SU (2) gauge transformations, but allowing the connection to be complex without restriction
in turn allows for SL(2, C) transformations. Since these conditions are nonpolynomial it becomes difficult to implement them upon quantisation.[2]
E (β)
E (β)
=
;
β
β
A(β) − Γ
A(β) − Γ
=
β
β
(36)
It was found however, that T.Thiemann’s regularisation of the full Hamiltonian makes it unnecessary to simplify the Hamiltonian. In addition to this
J. Fernando Barbero G had shown that you can have Lorentzian General
Relativity with just the real connection.[7] There exist criticisms of Lorentz
Covariance in this connection [8], but it seems a connection to Lorentzian
General relativity can still be made (with certain caveats).[9] As a result,
much of the work that has been done in this field pertains to the real connection and dispenses with the need for the tricky reality conditions. The
real connection is often referred to as the Barbero connection, while setting
γ = ±i gives the Ashtekar connection.
12
3
Loop Quantum Gravity
3.1
Quantisation
In this section, the Sen-Ashtekar-Immirzi-Barbero connection is taken to be
real so that we will be dealing with the gauge group SU (2) instead of the
group SL(2, C). (γ = 1 will be used for convenience here unless explicitly
stated.) The reason underlying this is that the group SL(2, C) is non compact, which does not allow us to directly apply numerous techniques from
Yang-Mills theory. Furthermore, most of the progress that has been made
in Loop Quantum Gravity has been with the real connection. Specifically,
the Euclidean theory will be covered in this section as it is by far more approachable, and the action of its Hamiltonian is easier to describe.9 While
the full Lorentz theory will not be fully described by the results of the Euclidean theory, the quantisation is largely the same and very often we can
extend the results to the Lorentz theory. This section will follow the book
by Carlo Rovelli [10] with deviations to other sources. For an extremely
detailed account one could look at Thomas Thiemann’s book as well [2].
To quantise Hamiltonian general relativity, we first consider wave functions of the connection Φ[A] which are functionals on the configuration space
G (space of the 3-dimensional connections defined on Σ). The canonical
variables are promoted to operators that act on these wave functions (37)
and poisson brackets to commutation relations of the operators [10]. The
Hamiltonian constraint acting on a state HΦ = 0 gives us the WheelerDewitt equation and governs the dynamics of our system. The remaining
two constraints are the conditions that we must have gauge and diffeomorphism invariant states. What we want to find is the suitable Gelfund triple
S ⊂ H ⊂ S 0 where S is a suitable space of the functionals Φ[A] so that we
have a kinematic state space.
Âia (τ )Φ[A] = Aia (τ )Φ[A]
1
δ
Êia (τ )Φ[A] = −i~ i
Φ[A]
8πG
δAa (τ )
(37)
A few changes are still required to the canonical variables before we embark to find the rigged Hilbert space for quantisation. Since the Poisson
bracket between Aja and Eja turns out to be a distribution, we might first
think of smearing these variables with test functions faj , Fja as our first attempt (38). However, if we use the (smeared) Gauss constraint (which is the
generator of gauge transformation), and take its poisson bracket with the
9
This is because in the Hamiltonian constraint the term (β 2 + 1) becomes (β 2 − 1) for
the euclidean theory, which then means that for γ = 1 the term will cancel, simplifying the
constraint in an identical manner that Ashtekar originally did for the Lorentizan theory.
13
smeared connection we see that it transforms inhomogeneously as a gauge
potential rather than in the adjoint representation.
Z
E(f ) :=
Z
d3 xfaj Eja ;
F (A) :=
d3 xFja Aja
(38)
σ
σ
κ
{G(Λ), F (A)} = −β
2
Z
d3 xFja [∂a (Λj ) + jkl Aka Λl ]
(39)
How then do we construct something that does transform in the adjoint?
This problem has not only been considered by Loop Quantum Gravity, but
in fact it has been well studied in Lattice Gauge Theories. The solution that
has been found is the method of Wilson Loops.[11]
Let’s start by defining parallel transport from connections and then
holonomies. Say that we have a curve γ and parameter t defined below,
as well as a covariant derivative ∇a defined by a connection A. The requirement that a co-vector E b is parallel transported along γ is written as
γ̇ a ∇a E b = 0. Expanding this equation, we get to the partial differential
equation (41), and integrate it so that we get the following line.[12]
γ : [0, 1] → Σ;
s → xµ (s);
γ(0) = I
(40)
γ̇ a (s)∂a E b (s) = −ig γ̇ d (s)Ad (s)E b (s)
Z s
b
b
E (s) = E (0) − ig
dtγ̇ a (t)Aa (t)E b (t)
(41)
0
We want to eliminate of the term E b (t) from the right-hand side of the
equation (41). To do this we iterate the equation by inserting the equation
into itself to arrive at the expression (42) which is now a sum to infinity
with E b (0). We can also define the path ordering operator P which pushes
operators with larger t to the left. Using the formula (43), we can then
express this as the path ordered exponential( 44) and gives the parallel
propagator hγ (A).
b
E (s) =
∞ X
n=0
n
Z
(−ig)
a1
an
ds1 ...dsn γ̇ (s1 )Aa1 (s1 )...γ̇ (sn )Aan (sn ) E b (0)
s1 ≥...≥sn ≥0
(42)
Z
1
dt1 ...dtn γ̇ (t1 )Aa1 (t1 )...γ̇ (tn )Aan (tn ) = P
n!
t1 ≥...≥tn ≥0
a1
an
Z
s
n
γ̇ (t)Aa (t)dt
a
0
(43)
14
Z
E (t) = P exp −ig
b
s
a
γ̇ (t)Aa (t)dt
E b (0) = hγ (A)E b (0)
(44)
0
When the starting and ending point of the curve are the same point,
the parallel propagator is instead known as the holonomy10 U (A, γ). The
holonomy can be defined as a linear transformation at a point p and can be
interpreted as the failure of the parallel transport around a loop to ‘preserve’
the tensor. The holonomy can be said to be a group element determined by
the connection A and path γ.
Going back to the Asktekar connection Aa , let us write it as the oneform A = Aia τi dxa where τi = − 2i σi is the su(2) Lie algebra basis, and σi
are the Pauli matrices. We can do this as we know that A transforms as a
gauge potential in the adjoint representation, and the Lie algebra of SO(3)
and SU (2) are isomorphic to one another. If we then examine the gauge
transformation of the holonomy, we find that it transforms nicely in the
adjoint representation of SU (2) and the connection gets smeared along one
dimension. Just like the wavefunctions, the holonomy (given a curve γ) is a
functional on the configuration space G.
For completeness, how then do we smear the conjugate operator Eja ?
For reasons to be discussed later, the form of E that we are using will be Ei
which is the functional derivative smeared across a two dimensional surface
S.
Moving along, Φ[A] can now be expressed using the holonomies as a basis.
Say that there is a collection Γ of smooth oriented paths {γi : i = 1, ..., l}
which are embedded in the hypersurface Σ. Let this collection be ordered.
We also have a smooth function of group elements f (U1 , ..., Ul ) known as
a cylindrical function. A brief definition of the cylindrical function is that
it is a function of classical configuration space (see source [5] for a better
description and [2] for a more rigorous one). We are then able write a
functional of the connection Φ[A] as (45), where (Γ, f ) defines the functional.
We can then define S as the space of these functionals for all Γ and f . A
scalar product for S is defined in (46) for two wavefunctions defined by the
same ordered oriented graph Γ, but different functions f and g. dU is the
Haar measure on SU (2).
ΦΓ,f [A] = f (U (A, γ1 ), ..., U (A, γl ))
(45)
Z
hΦΓ,f |ΦΓ,g i ≡
dU1 dUl f (U1 , ..., Ul )g (U1 , ..., Ul )
(46)
This product can be simply extended if the two wavefunctions differ in
their graphs merely by ordering or orientation.
10
Unfortunately, the terms holonomy are and parallel propagator are often used interchangably in the literature, so little distinction is made here.
15
However, what happens if the functionals ΦΓ0 ,f 0 and ΦΓ00 ,g00 are defined
for different Γ? In this case, we start off by considering the union of the l0
and l00 curves of the two graphs (Γ = Γ0 ∪ Γ00 ), and define the new functions
in the manner g 00 (U1 , ..., Ul00 ) = g(U1 , ..., Ul0 , Ul0 +1 , ..., Ul0 +l00 ). We can now
define the scalar product of these two different Φ as (47).
hΦΓ0 ,f 0 |ΦΓ00 ,g00 i ≡ hΦΓ,f |ΦΓ,g i
(47)
Aside: Initally, Loop Quantum Gravity was constructed as a theory of
loop states provided by the case of Γ being a single closed curve α and the
function f was the trace of the holonomy (tr). This state is written as
|αi = Φα . To express this in terms of the connection A, we have (48).
Φα,tr [A] = hA|αi = trU (A, α)
2
Z
|Φα | =
dU |trU |2 = 1
Φ{α} [A] = Φα1 [A]...Φαn [A]
Z
Φ[α] = hΦα |Φi =
H dµ0 [A]tr P e αA Φ[A]
(48)
(49)
(50)
(51)
The norm is then given by the scalar product we defined earlier and gives
us (49). We can have a multiloop state which is a finite collection {α} of
loops defined in (50). A functional in loop space is given by (51) , where
we can see that it looks like a sort of Fourier transform from the space of
connections to the space of loops. The reason that this representation fell
out of favour is that the loops here form an over complete basis and result in
complicated non-linear relations between the different elements of the basis.
3.2
The Kinematic Hilbert Space
Now that a general idea of how to construct basic wavefunctions Φ[A] has
been covered, let us examine the kinematic Hilbert space in detail. The
space S is the space of linear finite combinations of the states Φ[A]. Then
the kinematic Hilbert space Hkin is defined as the space of all linear superpositions of these wavefunctions with a finite norm.[13] Mathematically, we
can say that it is“the space of the Cauchy sequences Φn , where ||Φm − Φn ||
converges to zero”.[10] The dual of S is S 0 , and is defined as“the space of
sequences Φn such that hΦn |Φi converges for all Φ in S”.[10] This gives us
the full definition of the rigged Hilbert space that we mentioned earlier. We
use this definition, as the scalar product defined earlier is diffeomorphism
16
and locally gauge invariant. It gives real classical observables as self-adjoint
operators. The strict conditions that the scalar product satisfies are necessary so that we have a consistent theory that gives correct classical limit.
Furthermore we have that the loop states Φα can be normalized. One of the
criticisms that might be raised is that the Hkin is non-separable and stems
from the spatial hypersurface Σ which is a continuum.[13] However, we see
that as we go to the physical Hilbert space H, the non-separability of the
original space was just gauge freedom and the physical Hilbert space itself
is separable. [10]
For a given collection of paths Γ, the cylindrical functions with support
e Γ ⊂ Hkin which is finite dimensional. This is
on Γ make up the space H
kin
the space of square integrable functions of SU (2)L where L is the number of
paths in Γ. Consequently if we have a another graph Γ0 ∈ Γ then the space
e Γ0 is proper subspace of H
e Γ . This structure gives a projective family of
H
kin
kin
kinetic Hilbert spaces, where Hkin is known as the projective limit of this.
Using the Peter-Weyl theorem, we can find a basis for Hkin . The theorem
states that: “A basis on the Hilbert space of L2 functions on SU (2) is given
by the matrix elements of the irreducible representations of the group.”[10]
Following [10], such representations are labelled by their spin j and the
Hilbert spaces on which they are defined are labelled Hj and their modules
are v α . Therefore we have matrices labelled by the representation they are
in and which group element they correspond to in (52). In this case we are
using the holonomies as the group elements of SU (2), and the indices α and
β label the matrix elements.
R(j)α β (U ) = hU |j, α, βi
(52)
Consider again a graph that is a collection of paths Γ = {γi ; i = 1, ..., L}.
Putting the previous information together we can obtain a basis for the
e Γ . By picking an ordering and orientation for Γ, we can then
subspace H
kin
e Γ as the
define a basis as (53). We can also represent this basis for H
kin
tensor product of the matrix elements defined earlier (54). In order that the
vectors are an orthonormal basis in Hkin we only take the states where j
only takes the values ( 21 , 1, 32 , ...), and not the singlet representation (j = 0).
To see the reason for this, consider two graphs Γ0 ⊂ Γ. The same vector
Γ0
appears in both the Hilbert spaces for Γ0 and Γ. However any vector of Hkin
belongs to the singlet representation of the loops that are in Γ but not Γ0 .
By eliminating the vectors which have (j = 0) for any j we eliminate this
redundancy.
|Γ, jl , αl , βl i ≡ |Γ, j1 , ..., jL , α1 , ..., αL , β1 , ..., β1 , ..., βl i
(53)
hA|Γ, jl , αl , βl i = R(j1 )α1 β1 (U (A, c1 ))...R(jL )αL βL (U (A, cL ))
(54)
17
Γ , where HΓ
We can then define the proper graph subspace Hkin
kin is
Γ
e
spanned by the basis states of Hkin with the extra condition jl > 0. All
the proper subspaces are orthogonal, and span the full kinematic Hilbert
space which we can now define in terms of the proper subspaces as in (55),
for all possible graphs Γ (including the Γ = graph). Without detail, Hkin is
the space of square integrable functions on the extended configuation space
discussed earlier, with the Ashtekar-Lewandoski measure.[10]
Hkin ∼
M
Γ
Hkin
(55)
Γ
One of the last questions that we can pose, before leaving the topic of
kinematic state space behind, is the invariance of the scalar product. The
transformations of the connection Aia mean that the kinematical state space
Skin carries a natural representation for local SU (2) and spatial diffeomorphisms Dif f (Σ). Furthermore, because of the way that the scalar product
was defined (46), we find that it is invariant under transforms of these groups,
and thus Hkin carries a unitary representation of these groups.[10]
As discussed earlier, Aia transforms as a gauge potential while the parallel
propagator U [A, γ] transforms homogenously as (56). We then define the
cylindrical functions under gauge transformations as fλ in (57), and then
the transformation of the quantum state therefore as (58). Given these
definitions, we can see that the scalar product is indeed invariant under
local gauge transformations. The basis states |Γ, jl , αj , βl i transform as (59),
where il and fl represent the points a path l begin and end respectively.
U [A, γ] → U [Aλ , γ] = λ(xγf )U [A, γ]λ−1 (xγi )
(56)
fλ (U1 , ..., UL ) = f (λ(xγf1 )U [A, γ1 ]λ−1 (xγi 1 ), ..., λ(xγfL )U [A, cL ]λ−1 (xγi L )
(57)
ΦΓ,f (A) → [Uλ ΦΓ,f ](A) = ΦΓ,f (Aλ−1 ) = ΦΓ,fλ−1 (A)
(58)
Uλ |Γ, jl , αl , βl i =
0
0
R(j1 )α1 α01 (λ−1 (xf1 ))R(j1 )β1 β1 (λ(xi1 ))...R(jL )αL α0L (λ−1 (xfL ))R(jL )βL βL (λ(xiL )|Γ, jl , αl , βl i
(59)
What about under diffeomorphisms? Let’s consider a slightly larger
group called extended diffeomorphisms Dif f ∗ , the reasons behind this will
be mentioned in section (3.3.2) Extended diffeomorphisms are invertible
maps φ : Σ → Σ so that the map and its inverse “are continuous and are
infinitely differentiable everywhere except at a finite number of points”.[14]
18
The connection Aia transforms as a one-form as expected, and Skin has the
representation Uφ of Dif f ∗ defined by (60). The holonomy transforms as
(61), which is the statement that shifting the connection by φ is the same
as dragging the curve γ. The cylindrical function defined by the pair (Γ, f )
is shifted to a new function defined by (φΓ, f ). Turning back to the inner
product, we see that it depends only on the functions f and g and not the
graph. It is therefore invariant under the extended diffeomorphism.
3.3
Uφ Φ(A) = Φ((φ∗ )−1 A)
(60)
U [A, γ] → U [φ∗ A, γ] = U [A, φ−1 γ]
(61)
Applying the Gauge and Diffeomorhpism Constraints
In the previous section, the kinematic Hilbert space was described as the
space of arbitrary functionals of the connection. To reach the physical
Hilbert space Hphys , we must apply the constraints in (34) one by one
to the quantum theory. This Hilbert space will therefore be the space of
functionals that are solutions to the Wheeler-DeWitt equations (also called
the Hamiltonian constraint) and are invariant under diffeomorphisms and
SU (2) gauge transformations. The constraints will be applied in the order
as shown by (62), where H0 is the space of states invariant under local gauge
transformations and Hdif f is the space of states invariant under extended
diffeomorphisms and local gauge transformations.
Hkin → H0 → Hdif f → Hphys
(62)
These two constraints are approached separately from the Hamiltonian
constraint as the application to the theory is not difficult. We are able
to construct their corresponding quantum operators and find the Hilbert
spaces H0 and Hdif f without difficulty. The quantisation and application
of the Hamiltonian constraint is a bit more tricky and will be approached
in a separate subsection. Furthermore, there are problems that still exist
with the Hamiltonian constraint and such problems will be discussed in a
separate section.
3.3.1
SU (2) Gauge Invariance and the Spin Network Basis
On the one hand, we could formally apply the diffeomorphism constraint
via quantisation to find the space H0 . However, we can also observe that
with the multiloop states that were discussed earlier, we already had a basis
that spans H0 .11 The multiloop states were the basis of choice in the earlier
11
The full mathematical derivation and treatment of H0 can be found in source [2].
19
days of LQG, but overcompleteness of the basis together with the non-linear
relation between the basis states made it difficult and complex to use.
Instead, the idea of spin networks as a basis was introducted by Rovelli
and Smolin [15] in 1995, and form an orthonormal basis.12 As will be demonstrated later, they are finite linear combination of the multiloop states. Let
an ordered collection of oriented curves be denoted as the graph Γ, and let
the end points of the curves be called nodes. Assume that if the curves
γ ∈ Γ overlap, it is only at the nodes. Lets call the curves links, and associate an irreducible representation j of the gauge group with a link l so we
have jl (non-trivial representations). The number of links beginning(ending)
at a node is called its outgoing(ingoing) multiplicity mout (min ). The total
multiplicity is defined as m = mout + min . We associate what is called an
intertwiner in to each node n, which map from one representation to another effectively ‘connecting’ the representations of different links. Consider
a graph with L links and N nodes. We can then define a spin network state
with the triplet S = (Γ, jn , in ), where Γ is the graph, jl is the choice of spin
representation for each of the L links, and in is the choice of intertwiner for
each of the N nodes. The choice of jl and in is called a colouring of the
links and nodes.
Given a general spin network state S = (Γ, jn , in ), we want to relate it
to the basis states |Γ, jl , αl , βl i that appeared in the earlier section. This
basis has L number of αl (up) and L number of βl (down) indices. We find
that the set of intertwiners in is in precisely the dual of the representation.
Consequently, we can write the spin network state as the contraction of
the two as per (63). The contraction between the indicies occur between
representation and intertwiners when a link (representation) ends (βl ) or
starts (αl ) at a node (intertwiner). The choice of intertwiner is limited by
the representations that end and start from it but this limitation does not
mean that the choice is necessarily unique. The local SU (2) invariance of |Si
is evident from the observation of the transformation of the basis |Γ, jl , αl , βl i
and the invariance of the intertwiners. We can write the spin network state
as a functional of the connection Aia as in (64). Each representation R(jl )
lives in the tensor product space of Hj∗l ⊗ Hjl and so the first bracket of the
RHS (64) lives in the space ⊗l Hj∗l ⊗ Hjl while the second bracket lives in
the dual of this space.
β ...βn1
|Si ≡ vi11
β(n
βn +1 ...βn2
)+1 ...βL
v 1
...viN N −1
α1 ...αn1 i2
αn1 +1 ...αn2
α(n
N −1 )+1
...αL
|Γ, jl , αl , βl i
(63)
12
The application of spin networks to quantum gravity is from [15] but the original idea
of spin networks can actually be though as starting with Penrose.[15]
20
!
!
ΦS [A] = hA|Si ≡
O
R(jl ) (U [A, γl ]) .
O
(64)
in
n
l
The basis of the spin networks is therefore labelled by the choice of Γ
and the colouring of the links and nodes in that graph. As a reminder,
the states for which j = 0 are not included to avoid redundacy. We know
from before, that the states |Γ, jl , αl , βl i form a basis in Hkin , and we then
used the intertwiners to form a set of basis states that were locally gauge
invariant. Technically the Γ labels in the spin network basis representents
any unordered and unorientated graph, but the colouring of the links and
nodes chooses the ordering and orientation for Γ.[10] The space S0 (of the
Gelfand triple for H0 ) is the space of any finite linear combination of the
spin network states |Si.
Aside: To look at how multiloops and spin network states are related,
let’s first look at the map , which is the map between a representation j
and its dual j ∗ . The object ab is actually the totally antisymmetric tensor,
and allows us to raise and lower indices. The second fact we approach is
that a representation with spin j can be written a tensor product of the
defining (jdef ining = 21 ) representation 2j times which is fully symmetrised
on its up and down indices (separately). The re-casting of R(j) (U ) is shown
in (65).
R(j)α1 ,...,α2j β1 ,...,B2j (U ) = U (α1 (β1 ...U α2j ) β2j )
ζ
ζ)
(65)
ζ
00
2j
1
vα1 ,..,α2j ,β1 ,...,β2j 0 ζ1,...,ζ2j 00 = α1 β1 ...αa βa δβa+1
...δβζb 0 δαb+1
a+1 ...δα2j
2j
(66)
The intertwiners then become simple combintations of δab and ab and a
general decomposition is demonstrated in (66).(with j = a+c, j 0 = a+b and
j 00 = b + c) If the parallel propagator of two curves (γ1 , γ2 ) are intertwined
by the delta δab as in (67), then the resultant object is the propagator of the
curve made by joining the two curves and is denoted as γ1 #γ2 = γ3 . On the
other hand, if we have the two curves joined by ab , then we use the fact that
ab U b c cd = (U −1 )d a to give the combination (γ1−1 #γ2 ). This decomposition
of the representations and the intertwiners gives us the decomposition of a
spin network state into a linear combination of multiloop states, and a better
mathematical treatment can be found in [10]. A graphical idea of this is to
replace a spin j link with 2j parallel links and then connect it each end to
one other (non-parallel)link that is at the same node as itself. The nonredundant permutations of this give us the decomposition into multiloop
states.
21
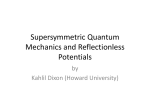
Figure 2: A specific example of a spin network’s decomposition to loop
states. Source: [10]
U [A, γ1 ]A B δ B C U [A, γ2 ]C D = U [A, γ1 #γ2 ]A D
(67)
DA U [A, γ1 ]A B BC U [A, γ2 ]C E = U [A, γ1−1 #γ2 ]D E
(68)
To demonstrate the spin network states, let’s consider a spin network
with two nodes (n1 , n2 ) and three links (γ1 , γ2 , γ3 ) connected to these two
nodes. Let the colouring jl of the links be j1 = 1, j2 = 12 , j3 = 12 , where γ1
carries indices in the adjoint representation of SU (2) (written as the indices
(i, j, ...)) while the other two carry indices in the defining representation
(written as (a, b, c...)).13 What about the intertwiners iiab ? This is known
to be given by (for this example) the Pauli matrices such that iiab = √13 σ iab
which has the required property (69), and it happens that this is the only
choice of colouring of the nodes in this case. The numerical factor √13 is
for normalization. In order to express this state in terms of the connection,
again we use that the holonomy (given the connection A and a curve γ)
gives us a group element and express the state as in (70). The indices are
fully contracted and is locally SU (2) invariant. The decomposition of this
spin network state can be shown [10] (without going into detail) as the
combination of multiloop states as shown in equation (71), and graphically
in figure (2).
R(1) (U )i j U a c U b d σ jcd = σ iab
1
ΦS [A] = σiAB R(1) (U [A, γ1 ])i j U [A, γ2 ]A C U [A, γ3 ]B D σ jCD
3
i
1h
ΦS [A] =
Φ(γ1 #γ −1 ,γ1 #γ −1 ) + Φ(γ1 #γ −1 #γ1 #γ −1 )
2
3
2
3
2
13
The indices apply to this example only.
22
(69)
(70)
(71)
3.3.2
The Spatial Diffeomorphism Constraint
The mathematical rigour of finding the quantum diffeomorphism constraint
operator from the classical version (34) can be found in source [2]. For
this dissertation, it suffices to say that such an operator exists (for finite
diffeomorhpism) and closes without anomaly. What we are looking for here
are the states that span Hdif f . In other words we want to find the (extended)
diffeomorphism-invariant states from the gauge invariant states.
Given a (unitary) representation Uφ of the diffeomorphism group, we
might expect to act on a spin network as Uφ |Γ, jl , in i = |φΓ, jl , in i, but
this is not generally the case. In fact, we could have a diffeomorphism that
leaves the Γ invariant but changes the spin network state. This is because a
diffeomorphism could change the orientation and order of the links, therefore
affecting the colouring of the graph.
To demonstrate this, lets take a graph Γ composed of two loops γ1 , γ2
(links that join to themselves) and a link α that joins the two loops . Let
the colouring of the loops be j = 21 while jα = 1. Choosing the normalised
intertwiner to be σiAB , we can express the spin network Φs [A] as (72), or
using representation theory for SU (2) we can also express it in the multiloop
state as the trace of the Holonomy (73). Consider now a diffeomorphism
φ that flips the orientation of γ2 but leaves the other links alone and gives
us φΓ = Γ. This diffeomorphism effectively flips the sign of (73) so that
Uφ ΦS [A] = −ΦS [A]. For an oriented and ordered Γ, there are a finite
number of diffeomorphism that change the orientation and order of Γ which
form a finite and discrete group GΓ . Calling the elements of this group gk ,
they act on HΓ .
ΦS [A] = U (A, γ1 )A B σi B A R(1) (U (A, α))i j σ jD C U (A, γ1 )C D
ΦS [A] = C
(72)
trU A, γ1 #α#γ2 #α−1 − trU A, γ1 #α#γ2−1 #α−1
(73)
If we consider the action of the diffeomorphism on the spin network
states, there is no state in H0 which is invariant under diffeomorphisms.14
Therefore there are no diffeomorphism invariant states in H0 ! Consider
0
instead the space S0 whose elements are linear functionals Ψ that act on
the elements Φ of S0 . The action of a diffeomorphism on Ψ is defined as
(74), and therefore the requirement of diffeomorphism invariance is (75).
0
The diffeomorphism invariant states are actually found in S0 and not H0 ,
0
so that Hdif f ⊂ S0 .
(Uφ Ψ) [Φ] ≡ Ψ Uφ−1 Φ
14
(74)
“...there is no finite norm state invariant under the action of the diffeomorphism
group.” [16]
23
Ψ [Uφ Φ] = Ψ [Φ]
(75)
To find the states that are members of Hdif f , first define Pdif f the map
0
from S0 → S0 such that the image of Pdif f is defined by (76). This is a
00
00
sum over all Φ in S0 where we have Φ = Uφ Φ for φ ∈ Dif f ∗ . We must
0
now ask if this sum is finite. Since we have that (Φ, Φ ∈ S0 ), they are a
finite combination of spin network states. If φ changes that graph of a spin
network Φs , then the resultant state is orthogonal to Φs . If it does not change
Γ but instead the colouring, we know that the possible changes are the group
GΓ which is discrete and finite and gives a discrete multiplicity in the sum
(76). Therefore the sum is finite and well defined, and we can say that the
functionals (Pdif f (Φ) = Ψ) span the diffeomorphism invariant states. Thus
we can say more specifically that the map Pdif f is from S0 → Hdif f ⊂ S00 ,
and as a result of this states in S0 that are related by diffeomorphism are
mapped to the same member of Hdif f as shown in (77). We then give
the definition of the scalar product on the diffeomorphism invariant Hilbert
space as (78), or the bilinear form (79).
X
(Pdif f Φ) Φ0 =
hΦ00 , Φ0 i
(76)
Φ00 =Uφ Φ
Pdif f ΦS = Pdif f (Uφ ΦS )
(77)
hPdif f ΦS , Pdif f ΦS 0 i ≡ (Pdif f ΦS )[ΦS 0 ]
X
hΦ, Φ0 iHdif f ≡ hΦ|Pdif f |Φ0 i ≡
hΦ00 , Φ0 i
(78)
(79)
Φ00 =φΦ
We now have a separable space Hdif f , and it hinges upon the fact that we
have chosen the states to be invariant under extended diffeomorphisms, and
not smooth diffeomorphisms.[16] Let’s briefly approach what is called Knot
theory. Given the set of spin network states |Si, a diffeomorphism sends
it to an orthogonal state or changes the orientation and order of the link.
Denoting such a change in orientation and/or ordering as gk |Si , (gk ∈ GΓ ),
we can then see that the earlier defined bilinear inner product acts as (80).
Note that the index k is discrete and finite since GΓ is discrete as well. We
can then define the equivalence class K as the class of unoriented graphs
which are equivalent under diffeomorphisms, this class is called a knot. Knot
theory is an ongoing field in mathematics, and while knots with no nodes
have been well studied, knots with nodes have been studied to a lesser degree.
(
0
if Γ 6= φΓ0
0
hS|Pdif f |S i = P
(80)
0
if Γ = φΓ0
k hSk |gk |S i
24
E
0
From (80), we can then see that the spin networks |Si and S lead
to states that are orthogonal in Hdif f unless they are equivalent in terms
of knotting. Therefore one of the labels for the basis states in Hdif f is
knot class K. Thus we can define (HK = Pdif f HΓ , (Γ ∈ K)) which is the
subspace of Hdif f and this subspace is spanned by the spin networks labelled
by the knot K. The basis states of HK themselves are now only labelled
by the colouring of their links and nodes. However the colourings are not
generally orthonormal due to the discrete symmetry group GΓ having a nontrivial action. To find an orthonormal basis we can further diagonalise (80)
and now denote a ‘colouring’ by c which corresponds (roughly speaking) to
colouring of link and nodes up to complexities introduced by GΓ . We now
have the basis states |K, ci that are called spin-knot/s-knot states.
The label of colouring is discrete as discussed earlier, and the label K
is also discrete as it has been found in knot theory that knots form a discrete set. Although the details15 will not be discussed here, if we used
Dif f instead of Dif f ∗ , the basis of knots would now not form a countable
basis rendering the Hilbert space Hdif f non-separable.[16] The basis |K, ci
is therefore discrete since its labels are discrete. Thus Hdif f is a separable Hilbert space. The non-separability of the kinematic Hilbert space was
present only as a gauge artifact.
3.4
The Area and Volume Operators
Going back to the chosen variables of holonomy (44) and the conjugate
momentum, we see that one more reason for the change of variables is that
the connection Aia and original conjugate moment act as a multiplicative
and functional derivative operator respectively. This would take us out of
the kinetic state space that was constructed.
The holonomy, as a configuration variable, has already been discussed.It
is now necessary to look at its conjugate momentum in detail. The ‘original’
conjugate momentum (the Triad) was just defined as a functional derivative
acting on a wavefunction. To replace this, we first look at the functional
derivative of the holonomy as in (81) and then smear the resulting object, so
that its poisson bracket with the holonomy will be non-distributional. Observing that the functional derivative gives us a 2-dimensional distribution,
the conjugate momentum is smeared accordingly. What has been found to
be the best is to smear it in the fashion (82), so that what we get is the flux
of Eia through a surface S (which is embedded in Σ) where (y1 , y2 ) are the
coordinates of the surface and na is the normal one-form to the surface.
Z
δ
U (A, γ) = dsγ̇ a (s)δ 3 (γ(s), x)[U (A, γ1 )τi U (A, γ2 )]
(81)
δAia (x)
15
Discussion on the consequences of using Dif f and the importance of the separablility
of the Hilbert space can be found in [16]
25
Figure 3: The intersection of the curve γ with surface S at point p.
Source:[10]
Z
dy 1 dy 2 na (~y )
Ei (S) ≡ −i~
S
δ
;
δAia (x(~y ))
na = abc
∂xb (~y ) ∂ c (~y )
∂y 1 ∂y 2
(82)
We now approach the question of how the holonomy and conjugate momentum act on a spin network state. It is easier first state the holonomy’s
action. For the example of the holonomy of a loop α (defined as Tα in (83) ),
it is apparent that the action of this, on a state is similar to that of the connection. It is merely acting as a multiplicative operator. In contrast to the
connection, it does not take the spin network out of the constructed space
and is hence well defined on Hkin . Instead what the new state represents
is a spin network same as the previous one but now with the new curve α
added to its graph.
Tα [A] = trU (A, α);
Tα |Si = |S ∪ αi
(83)
The action of the conjugate momentum however is a little bit more involved. Starting off, only the action of the operator on the holonomy of a
single curve γ will be approached. Let the endpoints of γ lie off the surface.
Let γ intersect the surface at most once at a point P and separate the curve
into γ = γ1 ∪ γ2 if it intersects. Figure (3) illustrates the given situation.
The action of the momentum on the holonomy is then given by equation
(84), and using source [2] if the curve does not intersect S then the integral
vanishes. If it does intersect however, the we can simplify further to get the
equation (84) as (85)!
26
Ei (S)U (A, γ)
Z
∂xa (~y ) ∂ b (~y )
∂
= −i~ dy 1 dy 2 abc
U (A, γ)
1
2
i
∂y
∂y ∂Ac (~x(~y )
S
Z Z
∂xa ∂xb ∂xc 3
= −i~
dy 1 dy 2 dsabc 1 2
δ (~x(~y ), ~x(s)) × U (A, γ1 )τi U (A, γ2 )
∂y ∂y ∂s
S γ
(84)
Ei (S)U (A, α) = ±i~ U (A, γ1 )τi U (A, γ2 )
(85)
Thus we say that the action of Ei (S) on U (A, γ) that it ‘grasps’ γ by the
insertion of the matrix ±i~τi at the point of intersection with S. We can
then move to the case of multiple intersections and arbitary representations
(j)
R(j) (U ) by equations (86) and (87) respectively (τi is the spin-j SU (2)
generator). Therefore the operator Ei is well defined in kinematic state space
and we see that we can associate this operator classically as the ‘electric’
flux though a surface as shown in [10].(88)
Ei (S)U (A, γ) =
X
±i~ U (A, γ1 )τi U (A, γ2 )
(86)
P
(j)
Ei (S)R(j) (U (A, γ)) = ±i~ R(j) (U (A, γ1 ))τi R(j) (U (A, γ2 ))
(87)
Z
Ei (S) =
Ei
(88)
S
3.4.1
The Area Operator
While Ei is well defined on Hkin , it is still not gauge invariant as seen by
the free index, and therefore it is not well defined as an operator on H0 . We
might think of simply contracting the index as E 2 (S) ≡ Ei (S)E i (S) but the
integral over the surface means that this isn’t a gauge invariant quantity.
However, computing it’s action on a spin network state S is still beneficial.
Assume that there is only one intersection P between the surface and the
spin network. Then if j is the spin of the intersecting link, we have that both
(j)
momenta insert the matrix τi once each, giving us the Casimir operator
(j) (j)
τi τi = j(j + 1) × I. This leads to the equation (89). However if we have
(j)
multiple intersections, the τi of different points are contracted giving a
non-gauge invariant state.
E 2 (S)|Si = ~2 j(j + 1)|Si
27
(89)
A(S) =
Z q
S
na Eia nb Eib d2 y
(90)
Therefore define instead a new operator A(S) for the surface S by
first partitioning the surface into N surfaces Sn so that ∪n Sn = S and
the surfaces Sn become
P p smaller as we take N to infinity. The operator
A(S) ≡ limN →∞ n E 2 (Sn ) is then defined. If we go back to the classical case, we get the operator A(S) to be (90) as given by the definition of an
intergral. In the quantum case (assuming that no node of S lies on S), we
see that no Sn will contain more than one intersection with the graph of S
given that N is ‘large enough’. Therefore we then have that the sum for the
n pieces of the surface becomes the sum over the (smaller set of) points of
intersection P between the surface and the graph and is independent of N .
This then gives us the action of the operator A(S) acting on a spin network
state as in (91). The value jP is the colouring of the link which intersects
S at point P . This operator is well defined in Hkin and the states S are
eigenfunctions of A(S).
A(S)|Si = ~
Xp
jP (jP + 1)|Si
(91)
P
Therefore we have a obtained a self adjoint operator A(S) for each surface in S ∈ Σ which is gauge invariant and therefore can be defined on H0 .
The spectrum of eigenfunction is given by the multiplets ~j = (j1 , ..., jn ), i =
1, ..., n where n is arbitrary and j are half integers(spins of the intersecting
links). We call this part of the spectrum the main sequence and their eigenvalues are given by (91). Finding the remainder of the spectrum is more
involved, although an important point is that the entire spectrum is real and
discrete. A discussion of how to find the remainder of the spectrum, where
the assumption that no node lies on S is discarded, can be found in sources
([10],[17]), and for an in-depth discussion source [2] would be appropriate.
We have that all eigenvalues of the operator are real and that it is diagonal
in spin network states, therefore it is self-adjoint.
A very important point is the intepretation of the given operator A(S).
If we look at its classical form, we find that it is actually the physical area
of S! Following source [10], what we actually have is a partial observable
that is the area of a fixed surface. Its operator A(S) is self-adjoint and has
a spectrum that is discrete, leading us to the prediction that any physical
area measured can only take values in this spectrum. This discrete spectrum implies that physical area is a quantized partial observable. To make
(91) more concise, we can put back in the relevant constants (including the
immirzari parameter) to give the main sequence as (92).
Aj = 8πγ~Gc−3
Xp
ji (ji + 1)
i
28
(92)
A very important conclusion we have reached here is that the discretisation of area is derived in LQG, not assumed! More importantly, we have
that the links in a spin network represent a quanta of area, depending on
the spin j that they have.
3.4.2
The Volume Operator
r
Z
1
3
d x
V (R) =
|abc ijk E ai E bj E ck |
3!
R
T abc (x, r, s, t) =
(93)
1
b
ijk R(1) (U (A, γxr ))il Ela (r)R(1) (U (A, γxs ))jm Em
(s)R(1) (U (A, γxt )kn Enc (t)
3!
(94)
T abc (x, r, s, t) → 2ijk E ai (x)E bj (x)E ck (x) = 2abc det (E(x))
(95)
In a similar manner to (90), we can now try and seek out a volume operator V (R). Classically we expect that the volume of a region R would
be (93), and we want to construct a corresponding operator that is regularised. To begin, consider the the ‘Three -Handed’ operator T abc (x, r, s, t)
as described in (94).16 It is called three-handed as it can ‘grasp’ a spin network at 3 different points r,s and t. These links (γxr , γxs , γxt ) that grasp the
network are themselves in the adjoint representation and joined at a point
x. Now consider the limit in which r, s, t → x, T abc (x, r, s, t) is now defined
instead as (95).
3
Z
2
Z
d y
E (S) =
S
2 0
Z
d y
S
d2 y 00 |na (y)nb (y 0 )nc (y 00 )T abc (x, y, y 0 , y 00 )|
(96)
S
1
E 3 (∂RI )
(97)
166 3!
Z
Z
Z
1
= 6 |det (E(xI )) |
d2 σ
d2 τ
d2 ρ|na (σ)nb (τ )nc (ρ)abc |
8 3!
∂RI
∂RI
∂RI
(98)
WI =
= |det (E(xI )) |
(99)
Beginning by working classically, start with a 3-dimensional (Riemannian) manifold and consider a region RI that is small, cubic and has volume
3 . For an arbitrary fixed point xI in the region, we can write the triad
and holonomy as the approximation E(s) = E(xI ) + O() and Uα (s, t)B
A =
16
A similar treatment of the area operator by using a ‘Two-Handed’ operator can be
found in [17]
29
IB
A + O() for any points s, t ∈ RI . Consider then the quantity WI defined as
in (97), which can then be simplified as (98) by applying the approximations.
By performing the intergrations we see that this WI is then compactly expressed as (99). This quantity is actually nonlocal and for → 0, it gives us
the volume element (approximately). The volume of a larger region V(R)
can then be defined as the following equation.
V(R) = lim V (R) = lim
→0
→0
X
3 W
1
2
I
I
!
;
W I =
1
E 3 (∂RI )
163 3!
(100)
The action of this operator on a spin network state can now be examined.
The following description will be summarised greatly, and more rigorous
treatment can be found in sources [10],[2] and [18]. As with the area operator
before, the integration over the surface of the region and the integration over
the links of the spin network combine to ‘seek out’ the intersection of the
links with the surface of the region. Let the points r, s, t be the points
at which the operator’s graph γ µντ graps the spin network. If there are
only two intersection points then one of the points will be grasped twice,
and given that the contribution is summed before taking the absolute value
their contributions will cancel.17 The summation thus is only across cubes
that have 3 or more distinct intersections with the network, and the surface
integral is only over the grasps when they act at distinct points. By taking to be small, we see that the only such cubes are ones that contain the nodes
n so the sum is reduced to a sum over the nodes. Therefore, to quantise
this, we define the volume operator acting on a spin network as (102), which
looks similar to before but now the triads are operators and we take the sum
over the nodes n.
1
E 3 (∂RI )|Si
166 3! q
X
V(R)|Si = lim
3 |WIn ||Si
WIn |Si =
→0
(101)
(102)
n
In the same vein, the operator E 3 (R) becomes a sum over the distinct
points r, s, t, and let T (r1 , s1 , t1 ) |Si be the result of this action for a distinct
set of points (r1 , s1 , t1 ). The action of the volume operator can then be cast
in the following equations.
17
The absolute value is taken first when considering different points, if they are at
the same point then their absolute value is taken after summing. To directly quote the
text as to why these contributions from the same point cancel,“...the result of the grasp
is symmetric but the operator is antisymmetric in the two hands - as follows from the
antisymmetry of the trace of three sigma matrices.”[18]
30
Figure 4: The action of the volume operator on a trivalent (left) is expressed
once again as a trivalent node. Source:[10]
1 X
T (r, s, t)|Si
166 3! rst
X q
V(R)|Si = lim
3 |WIn ||Si
WIn |Si =
→0
(103)
n
As we take to 0, the volume operator neither changes the graph of S
nor the colouring of the links. It only acts on the interwiners of the spin
network. While the action of the operator may look like there is an addition
of nodes and links, ultimately these new links and nodes can be represented
as an intertwiner at the same node up to an overall factor. Thus it gives us
back the original graph but with a term multiplied in which is determined
by the intertwiner.[10] A pictorial representation of this is given in figure
(4).
3
V(R)|Γ, jl , in i = (16π~G) 2
X
i0
Vinn |Γ, jl , i0n i
(104)
n
Using recoupling theory, it can be shown that the volume operator has a
discrete spectrum, is self-adjoint, non-negative and well defined [10]. Since
the operator is self-adjoint, we can find a basis of intertwiners in , for a given
network, in which the matrices Vin (and therefore the volume operator) is
diagonal with entries Vin .[18]
3.5
The Physical Significance of Spin Networks and Knot
States
To summarise the previous two sections, each node in the spin network
represents a quantized volume depending on the intertwiner of the node and
a volume can be associated with a network by summing up these elementary
31
pieces of volume. These elements are each separated from each other by
surface areas that are quantised, which are dependent on the colour of the
link that represents the surface area. We say that two pieces of volume
are adjacent only if the nodes that they correspond to are connected by a
link, and the surface area of the border is given by the link’s spin. In a
sense, the spin network therefore represents a 3-dimensional metric that is
quantised.[10]
However, the spin network |Si is still embedded in a 3-dimensional manifold. Let’s consider the knot state |si instead, which is the state given by the
action of Pdif f acting on |Si. Possible changes in ordering and orientation
of graphs will be ignored for ease of discussion. From the discussion earlier,
the operator Pdif f projected a state S into the diffeomorphism invariant
states s by considering a sum over all possible diffeomorphisms, which thus
retains all information about the spin network state S except for its locality
in the manifold. The knot state importantly retains the information about
the elementary volumes, the separating surface areas and the adjacency of
the volumes. We therefore can view the knot state as a discrete quantum
geometry that is independent of the manifold. We can compare this to metrics and geometry in general relativity, where geometry is independent from
the chosen metric and can be said to be an equivalence class of metrics. The
quantum states that are defined by these therefore are the quantum states of
space, as defined by their graphs, spins and intertwiners. However space is
the keyword here and not spacetime. Spacetime diffeomorphism invariance
must still be approached later.
3.6
The Hamiltonian Constraint
Thus far what has been constructed is a basis for the diffeomorphic and
gauge invariant kinematic Hilbert space of states, which are the knot states
s. In the final step, what is necessary is to apply the Hamiltonian constraint
operator to find the physical Hilbert space Hphys that is defined finally
by the set of states that satisfies the Wheeler-Dewitt equation Hφ = 0
which will then give us the dynamics. While there can be several different
regularisations of the Hamiltonian (which will be briefly discussed later), the
regularisation covered here is Thiemann’s regularisation for the Euclidean
theory.18 [19]
Z
H = N tr (F ∧ {V, A})
(105)
Working once again with the real connection, we seek to express the orig1
inal constraint without the factor det(q)
which complicates things. According
18
In the original paper T.Thiemann includes the regularisation for the full Lorentzian
Hamiltonian, but as stated earlier for reasons of simplicity only the Euclidean Hamiltonian
will be covered.
32
to Thiemann, it is possible to express H in terms of the connection A, curvature F , volume operator V and the lapse N as in the classical equation
(105). How then do we promote this to a quantum operator? The volume
operator has already been defined earlier, and what needs to be done is to
define F and A in terms of holonomy. Given a fixed point p, take 3 tangent
vectors (u1 , u2 , u3 ) at that point. Then consider a path γp,u1 of length starting at p where it is tangent to u1 , in the limit of being small, we can
express the holonomy(parallel propagation) of this path as the expansion
(106).
U (A, γp,u1 ) = I + ua Aa (x) + O(2 )
1
U (A, αp,u2u3 ) = I + 2 ua v b Fab (x) + O(3 )
2
Z
1
3
H = lim 3 N ijk tr hγx,u
−1 hαx,u u {V, hγx,u } d x
i j
k
→0 k
(106)
(107)
(108)
Consider also the (triangular) loop αp,u2u3 defined by having a vertex
at p, two paths (of length ) starting from p tangent to u2 and u3 at p as
edges, and closed by a path that joins the ends of the first two. Once again
taking to be small, the holonomy can be expressed in lowest order as (107).
Coming back to the Hamiltonian, we can now express it as (108). The three
vectors here are defined in a manner that their triple product is unity.
1 X 3
ijk
N
tr
h
h
{V(R
),
h
}
−1
m
α
m
γ
x
,u
u
x
,u
m i j
m k
γxm ,uk
→0 3
m
H = lim
(109)
Following the area and volume operators, we now regularise this by first
dividing the 3-dimensional manifold into regions Rm of coordinate volume
3 that are ‘small’. Converting the intergral into a Riemann sum we then
have (109), with xm being any point in region m and the lapse depends on
the region in the sense Nm = N (xm ). Because the factors of cancel neatly,
they can be left out from the expression.
h
i
X
i
H = − lim
Nm ijk tr hγx−1 ,u hαxm ,ui uj V(Rm ), hγxm ,uk
m k
~ →0 m
(110)
Now since we know that the volume and holonomy are properly defined in
the kinematic state space Hkin we can then obtain the Hamiltonian operator
as in (110). The choice of the point xm and paths u1 , u2 , u3 still are open,
and the choice must be done such that the operator is gauge invariant and
diffeomorphism covariant while also being well-defined but nontrivial. What
has been shown however, is that due to the inclusion of the volume operator,
33
the Hamiltonian only acts at the points of the nodes (that are trivalent or
higher) hence we can consider only the regions Rn where a node n of the
spin network is located.19 This then allows us to define the Hamiltonian as
(111,112), where we have a sum over the contributing nodes instead.
H|Si = lim H |Si
(111)
→0
i
h
i X
H |Si = −
Nm ijk tr hγx−1 ,u hαxm ,ui uj V(Rm ), hγxm ,uk |Si (112)
m k
~
m∈S
X
i X
H |Si = −
Nm
ll0 l00 tr hγ −1 hαxm ,l0 ,l00 V(Rm ), hγxm ,l |Si
xm ,l
~
0 00
m∈S
l,l ,l
(113)
Thus the choice of xm is the location of the nodes, so that the commutators are not trivial. Correspondingly, the best choice for the paths previously
defined are as tangent vector of the links emerging from the node l1 , l2 , l3
at the node, so that we are defining the holonomy using these links. Then
we have a sum over the possible different orderings of this set of links, and
if the node is more than trivalent we have a sum over the possible ordered
sets of distinct links as in (113).
Is the limit of equation (111) finite? The answer is no, as the limit does
not converge since the resultant spin networks are orthogonal to one another
as long as they have different values for . Interestingly, while it would not
be in the case for general states, the space of states Hdif f allow us take the
limit so that it is finite. To see this, let Φ be a state in S0 and let Ψ be
0
a state in its dual S0 . We then have that if the Hamiltonian acts on the
elements of S as HΦ then H acts on Ψ as (H † Ψ)(Φ) ≡ (Ψ)(HΦ). Its action
on a the spin network basis follows immediately by replacing Φ with |Si.
Consider now taking the limit on the space S00 as compared to S0 so that
instead we define H in terms of H via the equation (114). This gives us the
limit of a numerical sequence instead of a sequence of vectors in the Hilbert
space.
(H † Φ)|Si ≡ lim Φ (H |Si)
(114)
→0
0
Consider now a state Ψ = Pdif f Φ ∈ Hdif f and the spin network state
|Si. The operator (HΨ) changes the graph Γ of S as well as the colouring
of the state. The changes to the graph stem from the holonomies hγp,l and
hαp,l0 ,l00 . The first places a path on one of the links l of node n (at xn = p)of
length , while the second places a triangular loop α with a vertex at p and
0
00
two paths (whose length is proportional to ) along links l and l and a third
19
If the node is not at least trivalent then H vanishes. [10]
34
side joining the ends of the first two. Call m the value of epsilon for which
any of the four new paths touch ‘other’ nodes or links of S, other than ones
already talked about. For any value of < m , we see that changing does
not change its diffeomorphism equivalence class! Therefore if Ψ ∈ Hdif f
then we have that for < m the dependence of (H |Si) on is constant.
Thus we have that the limit is finite, and follows the equation (115). The
action of H on |Si is simply defined as that of (116), and we remember
that the arcs that are added do not run to other node or links besides those
belonging to n.
(H † Φ)|Si ≡ lim Φ (H |Si) = Φ(H|Si)
→0
H|Si = −
(115)
X
i X
Nm
ll0 l00 tr hγ −1 hαxm ,l0 ,l00 V(Rm ), hγxm ,l |Si
xm ,l
~
0 00
m∈S
l,l ,l
(116)
The action of the Hamiltonian on the states in Hdif f is as follows.[10]
Firstly you get a sum of terms for each node, which you can then get a
0
00
sum over the different possible ordered triplets of links (l, l , l ) for the links
that come from the same node for each node. Examining now its action at
0
00
0
00
a given node n and triplet (l, l , l ), the nodes n and n are created along
0
00
the links l and l , with a new link (called an “arc”) of spin half across
0
00
these nodes. The respective colourings j and j of the links connecting n
0
0
00
to n and n00 are changed from the previous links l and l by an increase or
decrease in spin by half. The intertwiner at n is then also changed so that
it becomes the intertwiner corresponding to the representation that the new
links are in.
H|Si =
X
Nn
n∈S
X
X
Hn,l0 ,l00 ,0 ,00 Dn,l0 ,l00 ,r,0 ,00 |Si
(117)
l,l0 ,l00 ,r 0 ,00 =±
The next goal is to obtain the matrix elements of the Hamiltonian. Define
a new operator Dn,l0 ,l00 ,r,±,± that acts on a node n by applying the additional
nodes, links and changes in colouring described in the previous paragraph.
Consider also the operator Hn,l0 ,l00 ,0 ,00 , whose action is on the (finite) space
of intertwiners at n. We can then define the action of H on |Si in these
operators as (117) and solving for the matrix elements of Hn,l0 ,l00 ,0 ,00 can be
seen as a SU (2) representation theory problem [10].
hs|H|Si =
X
n∈S
Nn
X
X
hs|Hn,l0 ,l00 ,0 ,00 Dn,l0 ,l00 ,r,0 ,00 |Si
(118)
l,l0 ,l00 ,r 0 ,00 =±
0
Having defined H on the dual space S0 , notice that these operators
0
actually take the knot states |si ∈ Hdif f ⊂ S0 out of Hdif f . We can observe
35
this by looking at the action of |si on a spin network state in (118). The
loss of diffeomorphism invariance arises as a result of the presence of the Nn
which we claimed earlier to be dependent on the points xn in the manifold
at which the nodes n of the spin network state are located. In the classical
theory H was already non-diffeomorphism invariant and there was no reason
to expect the quantum operator to preserve Hdif f . In the end however the
theory that H gives us is diffeomorphism invariant as the operator only
enters via its constraint HΦ = 0, and it is well defined on the space of
diffeomorphism invariant states as H is finite on the entire space. The
solutions of this equation is then, by definition a subspace of states in Hdif f
that belong to the kernel of H.
hS 0 |H|Si =
X
n∈S
Nn
X
|Φi=Uφ
|S 0 i
X
X
hΦ|Hn,l0 ,l00 ,0 ,00 Dn,l0 ,l00 ,r,0 ,00 |Si
l,l0 ,l00 ,r 0 ,00 =±
(119)
Now using the definition of a knot state s, as in section (3.5), the matrix
elements of the Hamiltonian in the spin network states can be expressed as
(119). This matrix is not symmetric, as for example, it projects states on to
the states with more (appropriately added) arcs but does not have an action
removing such arcs. Defining the complex conjugate as (120), we can then
define the Hs via (121) so that it is indeed symmetric and we could take it
to be the basic defining operator for the theory [10].
hS 0 |H † |Si = hS|H|S 0 i
1
Hs = = (H + H † )
2
(120)
(121)
It must be acknowledged that in the definition the Hamiltonian operator there is still some freedom. [10] Firstly, while the holonomy defined in
the Hamiltonian earlier was implicitly defined to be in the spin half representation, there is no reason that they cannot be in some arbitrary spin
j representation R(j) (h) since this does not change the classical limit. We
could define the Hamiltonian H (j) for a representation j as (122) and the
arc it adds will have spin j. In general we can take any linear combination
H̃ with cj as coefficients. There is also a question of whether a symmetric
Hamiltonian or non symmetric one would be correct. Furthermore the regularisation chosen by using loops αp,l0 ,l00 and γp,l are not necessarily unique
and other methods could be possible. Basically, there is no uniqueness theorem that has been found as of yet [10].
1 X 3
ijk
(j)
(j)
(j)
N
tr
R
h
R
h
{V(R
),
R
h
−1
m
α
m
γ
xm ,ui uj
xm ,uk }
γxm ,uk
→0 3
m
(122)
H = lim
36
This freedom that is encountered when trying to find the Hamiltonian
does not present a problem, and the very fact that we have a Hamiltonian
operator that is nontrival and finite is of great note. The Hamiltonian might
be eventually determined by consistency requirements that theory imposes
or it could be that it will be necessary to determine its form via experimental
results.
The Hamiltonian that has been presented here has been the Euclidean
Hamiltonian since we have taken the real connection, and the Lorentzian
Hamiltonian requires an addition of a term to (105).
For all that has been said about the Hamiltonian however, it is still not
without problems. For example, anomalies in the quantum algebra of the
constraint is one such problem that arises. An in-depth discussion will be
broached in the later part of this dissertation.
37
4
Matter Coupling in Loop Quantum Gravity
In classical general relativity, to add matter the the system you need to add
the correct action terms to the Einstein-Hilbert action which would then become the energy-matter tensor T µν in the famous Einstein equation. What
then needs to be done to quantise the matter-coupled theory of gravity?
Arguably the distinction between matter and gravity is mainly convention. The difference is seen by moving from the pertubative theories where
matter fields live on a background, to a background independent theory
where the gravitational and matter fields are defined to be ‘living’ on one
another. We can then realise matter in loop quantum gravity by using a
similar treatment of the matter fields as was outlined for the gravitational
field.
One of the earlier papers on including matter in the theory was presented
by A. Ashtekar et al, in their paper [20] in which they use a spinorial version
of the Asktekar variables. A more recent approach to the inclusion of matter into the theory can be found in a rigourous manner in [21], where the
Hamiltonian constraint of the theory is discussed in depth along with some
potential problems.20 In the section that follows, only a schematic overview
of matter coupling will be given.
4.1
Yang-Mills Theory
We begin with the Yang-Mills fields which are the easiest to include. In
the simplest version of the standard model, consider the product group
GY M = SU (3) × SU (2) × U (1) as the compact Yang-Mills group and AY M
as the connection (gauge field) for this group. To extend loop quantum
gravity the group G = SU (2) × GY M is then considered instead of the
SU (2) group by itself. The connection for this theory can then be given
as AY M G = (A, AY M ) where A is the gravitational connection. Then, as
in the previous section, we can define the holonomies as operators on the
kinematical state space. The conjugate momentum as is defined as the
surface integral of the (Yang-Mills) electric field which is similar to what
was previously done for the triad E when we considered gravity alone.
Thus we end up with a basis of knot states once again in the space
Hdif f . Corresponding to the knot states as defined in the previous chapter,
the links of the new knots carry an irreducible representation of G, and the
nodes carry the intertwiners between such representations. As G is a product
group of SU (2) and GY M , its irreducible representations are labelled by the
irreducible representations of SU (2) and GY M . Thus each link l is labelled
by a spin jl and an irreducible representation of GY M .
20
Another good source to learn from would be [2], but this section largely follows [10]
38
4.2
Fermions Coupling
Consider a densitised21 fermion field η(x) that takes Grassmann values,
transforms in the fundamental representation of SU (2) and a representation
k of GY M . This field and its complex conjugate live in a finite-dimensional
superspace S, and its measure over S is the Berezin symbolic integral dη.
ΦΓ,f [A, ψ] = f (U (A, γ1 ), ..., U (A, γL , η(x1 ), ..., η(xN ))
Z
(ΦΓ,f , ΦΓ,G ) ≡
Z
dUl
GL
(123)
dηn g(U1 , ..., UL , η1 , ..., ηN )f (U1 , ..., UL , η1 , ..., ηN )
SN
(124)
As defined before, a cylindrical functional ΦΓ,f [A, ψ] is a functional (123)
of the fermion field and connection, and is defined by, Γ a finite collection of
L paths γl N nodes at point xn and a function f of L group elements (given
by the holonomy of γl ) and N Grassman fields. The cylindrical functions are
at most linear in each fermion field at each point. A scalar product is once
again defined (124), and its extension to any two Φ of different Γ follows a
similar train of thought as before. A basis can be constructed by considering
the degree Fn of η at each point(node) xn . Note that this degree is either
zero or one (per field) due to the anticommuting nature of these fields, and
determine the node’s fermion number.
In the construction of the spin network states, consider the possible
contraction between indices that can be made. We can contract the indices
of the fermions (both SU (2) and YM indices) with that of the holonomy,
and so we have fermions on the nodes of Γ and flux lines (both gravitational
and Yang Mills) coming or ending at a fermion. The physical picture here
is that there are lines of force coming from particles that have charge.
4.3
Scalar Coupling
It has been shown in recent years that scalar particles exist and so its inclusion in matter coupling to loop quantum gravity is important. However if
we consider a scalar field multiplet φ(x) that transforms in the k representation of GY M , we find that it is unsuitable to work with. This is because the
multiplet takes values in the space Hk that is non-compact, thereby giving
the space infinite volume when working with natural invariant measures.[10]
21
It is probably better to work with
p
p ’half densitised fermion fields’, meaning that η(x) =
4
det(q)ψ(as compared to η(x) = det(q)ψ). This formulation is laid out in [22] and the
reason it gives is that, the gravitational connection then becomes complex and you would
get a non-compact gauge group for gravity. This would render many of the previous
techniques irrelevant. There are additional difficulties with using scalar fermion fields in
LQG.
39
We will then also have problems defining scalar fields in a diffeomorphism
invariant manner as it is background dependent in this form. [21]
To avoid this complication, we first consider that the multiplet φ(x)
transforms in the adjoint representation. Since this means it takes values in
the Lie algebra of GY M , we can then exponentiate to get a group element
of GY M as U 0 (x) = eφ(x) , which then has the usual Haar invariant measure
dU 0 .
ΦΓ,f [A, ψ, φ] = f U (A, γ1 ), ..., U (A, γL ), ψ(x1 ), ..., ψ(xN ), eφ(x1 ) , ..., eφ(xN )
(125)
Z
(ΦΓ,f , ΦΓ,G ) ≡
dUl
GL
Z
Z
dψn
SN
GN
0 )
dUn0 g(U1 , ..., UL , ψ1 , ..., ψN , U10 , ..., UN
0
× f (U1 , ..., UL , ψ1 , ..., ψN , U10 , ..., UN
)
(126)
Once again we expand the definition of the cylindrical function ΦΓ,f [A, ψ, φ]
to be a functional of the connection, fermionic fields and scalar fields. It is
defined by a finite collection Γ of L paths γl , N points(nodes) xn and f
which is a function of the the L holonomies of γl , N fermions (one at each
node) and N scalars. The scalar product between two functionals is defined
in (126), and its extension to functions of two different Γ is identical to the
previous case.
4.4
States in Matter Coupling
Using the cylindrical functionals, we can eventually reach the knot states |si
that form a basis for Hdif f that was done much like it was in the previous
section. These states are then labelled in the following manner. Associated
with each state is a graph Γ with L links l and N nodes n. Each link has
a spin jl and irreducible representation kl of GY M associated with it. The
nodes have an integer Fn , an irreducible representation of Sn of GY M , a
SU (2) intertwiner in and a GY M intertwiner wn associated with it. The
table below provides the physical interpretation of the labels.
40
Table 4.1: Quantum number for a spin network (Source: [10])
Quantum Number
Physical Quantity
Γ
Defines surfaces and neighbouring regions
in
volume defined by node n
jl
area defined by edge l
Fn
number of fermions at node n
Sn
number of scalars at node n
wn
field strength at node n
kl
electric flux across surface l
The dynamics of this matter-coupled theory can then be obtained by
considering a Hamiltonian that is modified from the matter-free theory by
an addition of terms [10]. While the exact Hamiltonian will not be covered
here, a full discussion and derivation of the terms can be found in source [2].
Further to this point, the matter-coupled theory will result in the addition
of terms to the Gauss and spatial diffeomorphism constraint by terms that
are contributed by the inclusion of scalar, fermionic and Yang-Mills fields.
An example of matter coupling will be covered in section (6.1.3), where
constraints will be explicitly given but not discussed in detail.
H = Hein + HY M + HDirac + HHiggs
(127)
To obtain the corresponding quantum operator H, the expression must
once again be regulated and well defined on kinematic state space. At the
end of this construction, this Hamiltonian is found to be finite and welldefined as an operator on the Hilbert space of the coupled theory. It gives
the dynamics of this theory via the Wheeler-Dewitt equation.[10]
41
5
The Hamiltonian and its Problems
While a brief overview of Loop Quantum Gravity has been presented in the
preceding sections, the question remains if the theory is consistent. The
following two sections aim to cover some of the more troubling problems in
the theory as it stands, that prevent it from being consistent.
Before considering the Hamiltonian constraint, it would be informative
to review its derivation and role in the classical theory. Starting from a fully
covariant theory of general relativity, we moved to the 3 + 1 dimensional
construction of the theory (ADM action) that assumes we have a manifold
which is globally hyperbolic. A Hamiltonian formuation of GR can then be
derived using Legendre transformations, and what is obtained is a fully constrained Hamiltonian. The two secondary constraints turned out to be the
generators of 3-D diffeomorphisms and time translations. While it appears
as if the 4-dimensional covariance of the theory has been lost in the process,
we find that it is still within the theory. It can be seen by taking the poisson
brackets of the secondary constraints among themselves and observing they
give a Dirac algebra. By restricting to the surface of the constraints we find
that the algebra gives the Lie algebra of the 4-dimensional diffeomorphism
group Dif f (M), which is how covariance is recovered.
The Gauss constraint is also considered and that demands a theory that
is SO(3) invariant. This arises from moving to the Triad formalism so that
we have a gauge theory version of general relativity. It constrains the extra
degrees of freedom that the Triads give when we introduce them. Note that
we can also say that it demands that the theory is SU (2) invariant as the
index carried by the Triad takes values in the lie algebra of SO(3), and the
two groups have identical Lie algebras.
When moving to the Quantum theory, regulation is necessary in order
to define the Hamiltonian operator. The regulation is starts on the gauge
invariant Hilbert space H0 , by considering points x in infinitesimal regions
R . The Hamiltonian is then expressed in terms of the volume operator and
holonomy. This gives us the definition of H but we find that the limit of
→ 0 needs to be taken on the space Hdif f so that the limit is finite. It is
also worth noting that the Hamiltonian acting on a knot state H |si takes
the state out of Hdif f . However if we compare this to the classical theory,
we find that the Hamiltonian there also does not keep Hdif f invariant, so
this fact is not a problem stemming from the regularisation. In the end,
what matters is that H enters the theory in the Wheeler-Dewitt equation
as HΦ = 0 which is well defined on Hdif f .
There are also other formulations and regulations of the Hamiltonian
that have not yet been encountered. Even for the treatment of the Hamiltonian that has been covered there are still numerous ambiguities that are
present. Furthermore the treatment of only the Euclidean Hamiltonian has
been presented and the full Hamiltonian (and its action) are far more com42
plex.
5.1
Locality and the Hamiltonian
The first problem is the action of the Hamiltonian on the Spin network states
(which was found by Lee Smolin [23] in 1996), for certain regulations of the
Hamiltonian including the one given earlier. For the regulated Hamiltonian
defined in section (3.6), the action of the Hamiltonian on a node is to add
an extra link and two vertices (along with changing the colour of two links),
and repeated action of the Hamiltonian tends to the ‘neighbourhood’ around
a given node.
Speaking in purely general terms, this regulation of the Hamiltonian
gives us physical states that can be described as being constructed from
finite-volume regions that are completely uncorrelated with each other. In a
dynamical theory, what is desired is that minute disturbances in a localized
region can be measured in an arbitrarily distant region so that there are
long ranged correlations. However while the Hamiltonian operator acts on a
spin network state as a whole, since it only acts with in the neighbourhood
of the nodes, and thus it is acting only node by node individually [13]. The
source says that the action of the operators defined on the space of solutions
is localised in space. The operators commute with each other unless they
act on regions under certain conditions, but these conditions restrict the
operators to regions of finite volume.
By seeing that the regions described are uncorrelated since the action
of the Hamiltonian is ‘ultralocal’, disturbances made are only detectable
in a finite distance from the point at which it is made. This is a major
problem as we therefore are unable to describe the propagation of massless
fields, or claim that the classical limit of the theory that we have is general
relativity! [23] We also find that it is possible to perform transition between
any physical states that changes a region’s volume expectation value an
arbitrary number of times, in a manner such that the transitions between
distinct regions are not correlated at any time. Such finding are unfortuately
not physical.
However, T.Thiemann asserts a contrasting conclusion to the first source.[24]
It gives that the comparison of LQG to the correlations in lattice gauge theory is an unfair one as the theories are inherently different. The source also
asserts that two adjacent nodes n and n0 (meaning that they share a link)
are implicitly influenced by one another when the Hamiltonian acts on it.
He does however acknowledge the ultralocality of such a regularisation is
cause for concern. [25]
It might be possible to construct a Hamiltonian that does not possess
this problem as asserted by [23]. The paper proposes that construction of
a Hamiltonian operator (rather than regularisation of the classical Hamiltonian constraint) that follows a certain set of rules will not have an ul43
tralocality problem. This process may require trial and error to find the
Hamiltonian with the correct semi-classical limit. Alternatively, there are
other regulations of the Hamiltonian that already exist which possess long
range correlations.[23]
5.2
Closure of the Quantum Algebra
As with the classical theory, the quantum theory requires that we have
again full spacetime covariance. If this is not obtained, we will not be able
to claim that the limit of the theory is general relativity, and we would
have a consistency problem. Following then in the path given by classical
canonical general relativity, the closure of the constraint algebra is necessary
for us to retain 4-dimensional diffeomorphism invariance.
The spatial diffeomorphism has a commutator that closes without anomaly.
However, this is only apparent after a few techniques are applied. In the
quantisation of the diffeomorphism constraint, it is worth noting that the
generator of infinitesimal diffeomorphisms cannot be well defined. Therefore,
using exponentiation, the generator of finite diffeomorphisms is defined and
used to show that the commutator of the diffeomorphism constraint with
itself has the correct result. [2]
Now we must consider the commutator of the Hamiltonian with the diffeomorphism constraint and the commutator of the Hamiltonian with itself.
Since the generator of spatial diffeomorphisms can only be well defined for
finite diffeomorphisms, such diffeomorphisms are used to check the commutator. Beginning with the classical poisson bracket (17), we want to exponentiate this bracket since we are considering the finite diffeomorphisms φ
(128).22 Thus if we have a unitary Û (φ) representation of φ on Hilbert space
then we expect to have the equation (129) in the quantum theory. What is
found in the end is that the equation in fulfilled in the space that we take
the limit of the Hamiltonian in. [2]
e
tLχ ~
H(u)
.H(N ) = H ([φut ]−1 )∗ N
Û (φ)−1 (Ĥ(N ))† Û (φ) = (Ĥ(φ∗ N ))†
(128)
(129)
Arriving at the Hamiltonian-Hamiltonian commutator, we now have to
be far more careful and look at the exact definition of the requirement of
“closure of the quantum algebra”. The most stringent notion requires that
we calculate the expression (130), where H ∗ is the dual of the Hamiltonian
since we defined the Hamiltonian on the ‘habitat’ ν ∗ , a subspace of the
22 u
ω
φt is defined to be “The one-parameter subgroup t → φut of Dif fsa
(Σ) (semianalytic
diffeomorphisms) determined by the integral curves of u”, where“u [is] a semianalytic
~
vector field on Σ” and “χH(u)
denotes the Hamiltonian vecotr field of H(u)
on the classical
~
continuum phase space M”. [2]
44
dual space S0∗ . As in section (3.6), a natural choice for this definition is
ν ∗ = Hdif f . There can be alternative choices though, and one such choice
is the ‘vertex smooth’ space of states.[26] The operator O∗ (N1 ; N2 ) should
then be found to be proportional to the generator of spatial diffeomorphisms.
Unfortunately, this cannot be realised since we have already asserted that
the generator of infinitesimal diffeomorphisms is not well defined for the
quantum theory. [13]
[Ĥ ∗ [N1 ], Ĥ ∗ [N2 ]] = Ô(N1 ; N2 )
(130)
[Ĥ ∗ [N1 ], Ĥ ∗ [N2 ]]χ = 0
(131)
Therefore we need to pursue a weaker notion of closure. The first one
we consider, is that the action of the commutator on a state χ in ν ∗ gives
0 as in (131). This is also carries the requirement that application of the
Hamiltonian twice leaves the space invariant, and this requirement (along
with (131)) is met by the vertex smooth states [13]. The second notion we
consider is similar to the regulation of the Hamiltonian used in the earlier
section. We first take the commutator without taking the limit to zero, and
find the operator O(N1 ; N2 ; ) that acts on S0 as O(N1 ; N2 ; )Φ. We then
again have to take the limit on the dual space (in fact the subspace Hdif f
of the dual) so that the requirement looks now like (132), where χ ∈ Hdif f
and we have zero on the right hand side.
i
h
(132)
lim hχ| Ĥ[N1 , ], Ĥ[N2 , ] Φi = 0
,→0
The difference between the two alternative notions of closure is the space
in which we take the commutator. In the first, we are already working in
the ν ∗ subspace when we take the commutator, in other words the limit has
been taken before the commutator. For the second notion, the commutator
is actually taken on the space Hkin using the Hamiltonian H[N ; ] prior to
taking the limit, the limit is only taken ‘outside’ of the commutator but still
on the space ν ∗ . In source [2], we find that the second notion limit is indeed
obeyed and that the algebra, in this sense, has no anomaly and the given
quantisation of the Hamiltonian is consistent.
Unfortunately in these two weaker notions of closure, it must be noted
that the constraints have already been implicitly applied by seeking such a
notion of closure [13]. In basic terms, it cannot be shown that the classical
limit gives us general relativity, even though the constraint algebra is consistent. When quantising canonical systems, all the constraints are usually
quantised without restriction of the states that they act upon (i.e. they are
operators on Hkin ) before examining the constraint algebra. However, we
45
see that checking the closure of the algebra using the weak notions of closure
could obstruct us from determining if we have the correct theory.23
5.3
An Alternative: The Master Constraint
The master constraint that was introduced by Thomas Thiemann in 2006
is a proposed alternative to the Hamiltonian Constraint [25]. The aim of
introducing this to hopefully alleviate the problems that have been raised.
This alternative constraint is introduced at the level of the classical theory
where it is then quantised in place of the Hamiltonian and will therefore
contain the dynamics.
The master constraint in the classical theory simplifies the Dirac algebra
of the constraints’ poisson brackets to a Lie algebra by reformulation of the
Hamiltonian constraint. We consider instead a constraint that is spatially
diffeomorphism invariant, since we have that the bracket of two Hamiltonians is proportional to a spatial diffeomorphism. The master constraint is
therefore defined as the position independent constraint (133). It is easy
to see that it is equal to the full set of constraints (H(x) = 0, ∀x ∈ Σ)
as the integral is positive definitive since the constraints take values in the
real line(H(x) ∈ R). It is desired that M is of density weight one, to allow
for quantisation in a background independent manner, therefore the factor
√1
is included since the original constraint itself has a density of one.
det(q)
This then replaces the brackets in (17) with a new set of poisson brackets
as in (134), and we see now that the bracket that replaces the HamiltonianHamiltonian bracket is not a structure function but zero! The constraint
algebra is now a Lie algebra.
Z
[H(x)]2
(133)
M=
d3 x p
det(q(x))
Σ
~ N
~ ), H(
~ N
~ 0 )} = −κH(L
~ ~N
~ 0)
{H(
N
~ N
~ ), M} = 0
{H(
(135)
{M, M} = 0
(136)
(134)
The following paragraph is a brief aside on Dirac observables. A function
Oα of the phase space is called a weak Dirac observable if its poisson bracket
with all constraints CJ is {Oα , CJ } = 0 on the constraint surface. Now that
we have constructed a new constraint, we need to check that M can detect
these weak Dirac observables. On first inspection we might come to the conclusion that it is unable to detect such observables since for any differential
function of phase space O, we have the bracket {O, M}|M=0 = 0 trivially.
23
Source [13] demonstrates this by using the an example of a system of a bosonic string,
but does not seem to assert it via a generic theorem.
46
Going deeper however, it can be shown ([25],(138)) that a function Oα of
phase space (that is at least twice differentiable) is a weak Dirac observable
if it satisfies the equation {O, {O, M}}M=0 = 0. An operator Os is called
a strong Dirac observable if {Oα , CJ } = 0 on all of phase space, and correspondingly we have that such an observable fulfills a similar requirement
{O, M} for all M.
{O, {O, M}} =
dµ(x) q jk (x){O, Cj (x)}{O, Ck (x)} + q jk (x){), {O, Cj (x)}}Ck (x)
X
1
+{O, q jk (x)}{O, Cj (x)}Ck (x) + {O, {O, q jk }}Cj (x)Ck (x)
2
(137)
Z
Z
dµ(x)q jk (x){O, Cj (x)}|C=0 {O, Ck (x)}|C=0 = 0
{O, {O, M}}M=0 =
X
(138)
The preparation for the quantisation of the Master constraint is similar to
the Hamiltonian constraint. It is rewritten using holonomies and the volume
operator, then regularised by dividing space into small regions R . Now
although the original constraint was not invariant under diffeomorphisms,
the Master Constraint is, and can thus be quantised directly on Hdif f by
exploiting the fact that a given set of states (bI ∈ Hkin ) define a complete
orthonormal basis for the inner product of Hdif f as η(bI ), the quadratic form
QM can be defined in (139).24 The quadratic form Qa on a Hilbert space
of an operator a represents the operator’s matrix elements as expressed by
hψ 0 |âψi.[2]25 τ is the chosen triangulation of the space Σ that is used in the
regulation of M, and I is the index set for the basis of the inner product.
The relation to the master constraint is via the inner product defined on
Hdif f (140) as expected, and M̂ is closed and densely defined on the Hilbert
space of diffeomorphism invariant states [25].26
0
QM (η(f ), η(f )) := lim
XZ
τ →Σ
→0 I∈I
Σ
3
"
Z
3
d x
Σ
Ĉ
#
"
0
Ĉ
d yφ (x, y)η(f ) p
(x)bI η(f ) p
(y)bI
4
4
det(q)
det(q)
(139)
QM (η(f ), η(f 0 )) = hη(f ), M̂ η(f 0 )idif f
24
(140)
Here the map Pdif f is renamed to η acting on bI so that η(bI ) ∈ Hdif f
The quadratic form may not give enough information to construct the operator unless it meets certain criteria, but the information it gives is enough “For most practical
purposes”[25].
26
QM can define the self-adjoint master constraint operator uniquely in this case because
it is semibounded and closable.[25],[27]
25
47
#
The dynamics is encoded by the Master constraint as it is for the Hamiltonian, in the equation MΦ = 0(Φ ∈ Hdif f ). The kernel of M is then the
Hilbert space of physical space. To find the physical Hilbert space, we first
assume that Hdif f is separable. This is not true a priori, but by performing
an additional averaging that is similar to how Hdif f was defined, we are able
to get a separable space without affecting the classical limit.[25] Given that
Hdif f is separable and using a positive measure µ the space Hdif f can be
written as (141). The Master constraint acts on the states of the reduced
⊕
Hilbert space Hdif
f (λ) as a multiplicative operator by the factor λ. Therefore the physical Hilbert space of states that satisfy the dynamics equation
is simply defined as in (142).
Z
L
Hdif f =
L
dµ(λ)Hdif f (λ)
(141)
R
L
Hphys := H (0)
(142)
How then does the new constraint benefit the theory? Approaching the
problem of the constraint algebra first, it is clear that the quantum constraint
algebra is now trivialised and gives the same algebra as we have classically.
It can be said to be anomaly-free, but this result does not allow us to reach
the conclusion that we have the correct semi-classical limit. While the constraint algebra now is trivial, this is a given result even though the algebra
for the original Hamiltonian constraint was not so. To get a Hilbert space
Hphys is large enough, (which is a statement of whether it contains enough
semi-classical states), it is usually necessary to have a non-anomalous constraint algebra. Therefore the question of closure in the original constraint
algebra has now been translated to a question of the size of Hphys . Even
though nothing new has been introduced in a sense, it allows the question
of consistency to be postponed until the very end of quantisation.[25]
In a smaller sense, the new constraint could also help to deal with the
question of locality. For the Hamiltonian constraint, the requirement of
satisfying the constraint algebra caused it to lack non-trivial action at nodes
that it creates. The triviality of the Master constraint’s algebra however
relaxes this requirement and allows a less local action, although it is not
forced to such an action.[25]
48
6
Fermion Doubling in LQG
6.1
In Lattice Gauge Theory
By inheriting the structure of Lattice Gauge Theory (LGT) into Loop quantum gravity via matter coupling, inevitably problems from gauge theory
might become incorporated into the gravitational theory as well. Fermion
doubling is such a problem that exists in both theories.
LGT was formulated as a non-pertubative method for investigating quantum fields, as certain phenomenon of QCD, such as confinement of quarks,
cannot be investigated pertubatively. The theory gets its name from assuming a priori that spacetime is flat and is discretised so that x = nµ a,
where x are the coordinates, a is the lattice spacing and nµ are the lattice
vectors (n = (n1 , n2 , n3 , n4 )) in one of the four directions and is an integer
(nµ ∈ Z). The usage of Euclidean (Imaginary) time with the substitution
t0 = it is typical in LGT as this makes numerical and theoretical calculations
easier, and allows for parallels to be drawn to statistical physics. Therefore
the use of Euclidean spacetime is typical in LGT.([28],[29])
This following subsection reviews LGT, and will be largely drawn from
the books by Heinz J. Rothe [28], Jan Smit [29] and the book co-authored
by I. Montvay and G. Munster [30].
6.1.1
Scalar Field Theory on a Lattice
Z
1
S=−
d4 xφ(x)( + M 2 )φ(x)
2
Z
1
d4 xφ(x)(− + M 2 )φ(x)
SE =
2
R
G(x, y, ...) = hΩ|T (φ(x)φ(y)...)|Ωi =
Z
Z[J] =
Dφe−S[φ]+i
R
Dφ φ(x)φ(y)...eiS[φ]
R
DφeiS[φ]
d4 xJ(x)φ(y)
(143)
(144)
(145)
(146)
For a quick overview of the basic LGT method, the example of a noninteracting massive scalar field will be covered. Starting from the continuum
theory, the action can be written as (143) and the Green’s function is given
by (145) in the path integral formulation. The generating functional Z[J]
with source J(x) can then be written as (146). The appropriate substitution
(x0 → −ix4 ) is made to move to the Euclidean formulation with the result
that the action now looks like (144). To then place the theory on a lattice,
the series of substitution in Table 6.1 can be made. The fields φ and parameter M are substituted as φ̂n = aφ(na) and M̂ = aM in order to remove their
49
length dimension (as can be derived from S) so that the path integrals can
subsequently be expressed using dimensionless fields. The Green’s function
can then be rewritten as (147) in the lattice formulation, with the action
in the lattice theory being written as (148). (µ̂ is the unit vector in the µ
direction)
Table 6.1: Substitutions to put QFT on a lattice (source [28])
1 ˆ
xµ → nµ a
φ(x) →
Qa2 φ(na)
→ φ(na)
Dφ → n dφ(na)
Rφ(x)
P
4
4
d x→a
n
RQ
dφ̂l φ̂n φ̂m ...e−SE [φ̂]
hφ̂n φ̂m ...i =
Rl Q
−SE [φ]
l dφ̂l e
SE = −
(147)
X
1X
1
1X
φ̂n φ̂n+µ̂ + (8 + M̂ 2 )
φ̂n φ̂n =
φ̂n Knm φ̂m
2 n,µ
2
2 n,m
n
(148)
Given the matrix Kmn (149) from the action (148), we know from the
−1 gives the two-point Green’s
path integral formulation of QFT that Kmn
−1
= δmn and the
function. To find it, we use the the definition of Knl Klm
momentum representation of Kmn . Note that the integration of the momentum to the position representation is restricted to the first Brillouin Zone
(BZ) −π < kµ ≤ π which exists due to the presence of the lattice. To find
−1 the ansatz (150) is made and therefore we have the momentum repreKmn
sentation of the two-point Green’s function G(k̂). To show its dependence
on the lattice sites and the mass, we write the two point function in position
−1 = G(m, n; M ). [29]
space as Kmn
Kmn = −
X
[δn+µ̂,m + δn−µ̂,m − 2δnm ]+M̂ 2 δmn =
µ>0
π
d4 k̂
−π
(2π)4
Z
4
4
X
µ=1
sin2
k̂µ
+ M̂
2
(149)
π
Z
d4 k̂
G(k̂)eik̂.(n−m) =
(2π)4
π
eik̂.(n−m)
d4 k̂
= hφ̂n φ̂m i
P
4
2 k̂µ
2
−π
−π (2π) 4
sin
+
M̂
µ
2
(150)
In order to extract the continuum two point function hφ(x)φ(y)i which
we know to be (151), we replace the dimensionless fields and parameters
with the original, then take the limit a → 0. Depending on the theory you
have to hold certain quantities fixed as you take the limit, but that detail
−1
Knm
=
Z
50
will not be expanded upon here. More information on finding the continuum
limit can be found in the sources [29] and [28]. In this case, the quantities
M, φ and x = na will be held fixed as we shrink the lattice spacing (152). By
making the appropriate substitutions into the equation (150), we can write
G( xa , ay ; M a) as (153) . Using k̃µ to represent the momentum on the lattice,
which corresponds to the continuum momentum as (154), we see that the
limit of this equation returns us to the original two-point function (151).
Z
∞
hφ(x)φ(y)i =
−∞
d4 k eik.(x−y)
(2π)4 k 2 + M 2
(151)
1
x y
G( , ; M a)
2
a→0 a
a a
Z π
4
a
x y
d k
eik.(x−y)
G( , ; M a) = a2
P
4
2
2
a a
− π (2π)
µ k̃µ + M
hφ(x)φ(y)i = lim
(152)
(153)
a
k̃µ =
6.1.2
kµ a
2
sin
a
2
(154)
Fermions on a Lattice
We can now attempt to place fermions on a lattice in a naive manner as
with the scalar field.[29] Our starting point is the Dirac action (155) with
generating functional Z[η, η̄] given by (156). To simplify matters and focus
on the lattisation of the theory, spinor indicies will be suppressed.
Z
i
d x (ψ(x)γ µ ∂µ ψ(x) − ∂µ ψ(x)γ µ ψ(x)) − mψ(x)ψ(x)
2
Z
d4 xψ(x)(iγ µ ∂µ − m)ψ(x)
S=
=
4
Z
Z[η, η] =
DψDψ e−S+i
(155)
R
d4 x(ηψ+ψη)
(156)
In a manner similar to what we did for the scalar field, we change to
an imaginary time so that we have an Euclidean action, and then discretise spacetime as before. Once again, we use the dimensionless fields
3
ψ̂n = a 2 ψ(na). The generating function and action for Euclidean spacetime
placed on a lattice (of spacing a) is then written as (159) and (157) respectively. We have the matrix Amn being written on the lattice as (158) and,
as usual, its inverse A−1
mn will give the propagator of the theory.
S=−
X 1
n,µ
2
ψ̂ n γµ ψ̂n+µ̂ − ψ̂ n+µ̂ γµ ψ̂n + mψ̂ n ψ̂n =
X
ψ̂ n Amn ψ̂m
n,m
(157)
51
1
γµ (δm,n+µ̂ − δm,n−µ̂ ) + M̂ δm,n
2
µ
Z Y
P
Z[η, η] =
dψ̂ l ψ̂l eS+ n (ηψ̂+ψ̂η)
Amn =
X
(158)
(159)
l
Refering to k̃µ = sinkµ as the lattice momentum and S(k) as the momentum representation of the propagator, we find that S(k)−1 is given by
(161) and so S(k) is given by (162) in terms of lattice momentum.
A(k, −l) =
X
e−ikn+ilm Amn = S(k)−1 δ(k − l)
(160)
mn
S(k)−1 =
X
iγµ sin(kµ ) + m
(161)
µ
S(k) =
m − iγµ k̃ µ
m2 + k̃ 2
(162)
Unfortunately, once you begin to take the continuum limit (a → 0) to
check its consistency with the normal pertubative formulation, problems
begin to arise. On first sight, we
√ get that S(k) in non lattice units gives
(163), which has a pole at k4 = i k2 + m2 near the origin (akµ = 0) giving
us a Dirac particle as desired. However, as with our previous analysis, we
must realise that the momentum can take values in the first Brillouin zone of
π
π
a < akµ ≤ a (reinserting lattice spacing). If we then expand the momentum
πA
as k = a + p, there are actually 16 total momentum four-vectors πA for
which the sine function vanishes. These are permutations of the having 0 or
π for each πAµ . (e.g. πA = (0, 0, 0, π) or πA = (π, 0, π, 0))
If we then expand the propagator in the new vectors πA , we find that
(A)
(to first order) S(k) becomes (164), where γµ = γµ cos(πAµ ) = ±γµ . Each
singularity gives us a different Dirac particle’s mass and so what we have is
a propagator (in the lattice version) corresponding to 16 different particles
in the continuum! [29]
S(k) =
m−i
m+
γµ sin(akµ )
a
P sin2 (akµ )
µ
a2
P
µ
=
m − iγk
+ O(a2 )
m2 + k 2
(163)
(A)
m − iγµ pµ
+ O(a)
S(k) =
m2 + p2
(164)
Of course, given that this problem has been identified since the early
days of lattice gauge theory, numerous workarounds have been found. The
main examples that are often mentioned are Wilson’s fermions and staggered fermions. Briefly speaking, Wilson’s fermions is a method that cures
52
fermion doubling by adding a term to the action so that the ‘new’ fermions
get infinitely massive in the continuum limit and thus never appear. This
however ends up sacrificing chiral symmetry of the lattice action. Staggered
fermions tries to alleviate the problem by ‘staggering’ the components of the
field to different point of the lattice and reduces the doubling, but does not
fully cure it.
6.1.3
Fermion Doubling
The root of the fermion doubling problem lies in the chiral symmetry for
action of the theory in the massless limit.[28] There exists a chiral symmetry
in the action of the free Dirac field when m = 0, and the lattice action sees
an extra ‘lattice’ symmetry somewhat similar to chiral symmetry. It is this
extra symmetry that is present in the lattice action which brings about the
doubling.27 Considering more specifically Quantum Chromodynamics, the
existence of a chiral symmetry in the action, but not of the path integral
measure, indicates the existence of a non-conserved chiral current so that for
some jµ , we have (∂µ j µ 6= 0).[29] When we place the theory onto the lattice
there is no chiral anomaly as the lattice path integral measure is invariant
under transformations. In moving to the continuum, it attempts to enforce
the symmetry that is seen ‘on the lattice’ in the action by conserving this
current.[30] The introduction of the fermion doublers is what happens in
this attempt at current conservation. Unfortunately, the conservation of this
current as well as the existence of these extra species of fermions present a
theory contrary to reality, and hence poses a problem.
In the previous section, it was shown that this problem exists for a theory which is placed on a Euclidean discretised spacetime, meaning that all
4 dimensions are placed on the lattice. In order to show that the problem
is transfered to Hamiltonian LQG, we need to first show that the problem
exists for a LGT in which time is left continuous while space is discrete,
similar to LQG. This formulation is known as the Hamiltonian formulation
of LGT, first presented by Kogut and Susskind [32]. There exist a general
fermion doubling theorem formulated by H.B Nielsen and M.Ninomiya, for
this sort of lattice (which they refer to as the Kogut-Susskind lattice).[33]
Let us take the case of a theory which is quadratic in the fields, has an
action which is local, translationally invariant, and chiral, with a Hamiltonian that is hermitian. Let the charges of the theory be exactly conserved,
locally defined and quantised. The Neilsen-Ninomiya no-go theorem then
states that, for such a field, fermion doubling is inevitably present so that
one has an identical number of left handed and right handed species. In
order to evade the theorem, one might use certain tricks, such as in staggered fermions where the fermion components are spread out, to reduce the
27
See the paper [31] for specific cases or the book [30] and its references for a more
general discussion on fermion doubling.
53
Table 6.2: Constraints of a matter coupled LQG (source: [34],[35])
(C)
(C)
(C)
(C)
H = Hgrav + HT + Hψ + HY M
ψ
Ha = Hagrav + HaT + Haψ + HaY M
GAB = Ggrav
AB + GAB√
√
(C)
b
Hgrav = −T r(σ a σ b Fab )
Ha = −i 2T r(σ b Fab ) Ggrav
AB = −i 2Db σ AB
(C)
α σ aA (D ψ)B
α (D ψ)A
Hψ = πA
Haψ = πA
Gψ
a
a
α
α
B
AB = π(A ψB)
(C)
HT = 21 π 2 + 12 Eia E bi ∂a T ∂b T
HaT = π∂a T
(C)
HY M = 21 qgab (ea eb + ba bb )
HaY M = abc eb bc
Gauss Law for gauge group G: G = Da ea + π A φA
number of doublings.[28] However in order to avoid the theorem completely,
it seems that it is necessary that the field in question does not meet the
theorem’s checklist, for example via the inclusion of a term that breaks
symmetry of the lattice action (e.g. Wilson’s fermions) which then makes
the extra fermions infinitely massive in the continuum limit.[28] There are
more recent possible workarounds such as“Wall domain Fermions” although
such theories will not be expanded upon here.
6.2
In Loop Quantum Gravity
The presence of fermion doubling in LGT can be though of as extending
to LQG via the matter coupling [34] that was shown in the earlier section.
What is essentially done in the paper [34] is that a map from the Hilbert
space of matter coupled LQG to the Hilbert space of LGT is constructed.
This is done to show that the spectrums of the Hamiltonians of the theories
are identical (excluding the gravitational aspects) in the low energy regime,
which then means that the problem of doubling in the fermions exists for
LQG as well. This section is essentially a summary of the paper [34].
We start with a matter coupled theory of LQG, which has a scalar field
T (x) that is used as a ‘clock’ field and chiral fermion fields ψ(x), and includes
the Yang Mills theory which has compact group G. Take the fermions to
transform in the representation r of G.
Due to the fact that spinors are involved in this theory, we will need to
quickly go over fermion-coupled LQG. Let us define two component spinor
A0
field ψ A with A = 0, 1, as well as the SL(2, C) soldering form28 σ (4)a A (x)
which is the spinor form of the tetrad field, and the Ashtekar connection
(4) B
AaA (x) (these are defined for the spinors in a general four dimensional
28
Once again, the indices i, j, k are the ’internal’ indices while a, b, c, ... are the tensorial
ones. Consequently the soldering form is not the Pauli matrices. The Pauli matrices carry
the internal gauge index instead, so that they are given by σiA B .
54
spacetime). Defining the normal to the hypersurface Σ as na , we can then
relate the soldering forms of SL(2, C) and SU (2) via (166). The superscripts
(4) are initially present to indicate that we are talking about quantities of
the 4-dimensional manifold while dropping such superscripts means that we
are referring to their pullbacks on to the 3-dimensional hypersurface.
0
a
σAB
0
nAA := σaAA na
√
A0
:= −i 2σ (4)a (A nB)A0
(165)
(166)
The configuration variables of the fermion-coupled theory is then the
Ashtekar connection AaA B on Σ and the fermion field ψ A . The conjugate
a B and
momenta for the connection is then the densitied soldering form σ̃A
†
densitised conjugated field π̃A := −i(det(σ))(ψ )A . (The tildes represent the
fact that they are densitised but the notation will be dropped following this
paragraph.) We can relate the new variable and momenta to the non-spinor
densitised triad and connection via the equations (167). This is only a quick
overview of fermion-coupled LQG from [35]. For an in-depth discussion
please refer to the article itself.
−i
−i i
aB
σ̃A
(x) = √ Ẽ ai (x)σiA B , AaA B (x) =
Aa (x)σiA B
(167)
2
2
Referring to the matter coupling at hand, we have our scalar field T (x)
and conjugate momenta π(x), and the fermion fields ψ Aα with their conjugate πAα . α is the index of representation r of G (these indices are sometimes
suppressed in what follows).
The constraints of the theory are once again the Gauss, Diffeomorphism
and Hamiltonian constraints, and are given by Table 6.2 where the different contributions of the different couplings can be seen.29 The densitised
magnetic and electric fields of YM field aa are ba and ea respectively.
Using the T (x) as the ‘clock’, we gauge fix by foliating the spacetime
manifold into spacial slices of constant T (x) = τ so that the Hamiltonian
constraint becomes (168), derived by integration over the spatial surface Σ.
[36] The limit found in (169) gives the regulation of the right hand side of the
former equation ( represents more than one regulation parameter, details
can be found in [36]). W needs to be defined on the kinematic Hilbert space
as the operators given by the regulated constraints are not diffeomorphism
invariant, but as with earlier (and in [34]), once the regulators are removed
appropriately, we can consider that the operators are acting on the states of
Hdif f . Note that for this case, the Hamiltonian is being quantised so that
it is non-graph changing. A state whose graph is given by Γ is mapped to a
state with graph Γ as well.
29
Here the Hamiltonian constraint is written as H (C) as the Hamiltonian H referred to
in this section will not be the constraint.
55
∂
i~ Ψ =
∂τ
Z
W = lim
q
(C)
(C)
d x −2[Hgrav + Hψ ]Ψ
3
Σ
Z q
→0 Σ
(C)
(C)
−2[Hgrav + Hψ
(168)
]Ψ
(169)
Now we perform an approximation similar to the Born-Oppenheimer
(C)
approximation in atomic physics by expanding the constraint Ĥgrav in Ŵ so
that we can remove it from the square root. By considering the cosmological
(C)
(C)
constant separately as Ĥgrav = −det(E)Λ + ĤEinst , we can then expand W
where Λ is large so that we have (170).
Z
Ŵ = lim
→0 Σ
W
ef f
d3 x
q
√
(C)
(C)
+det(E)Λ − 2[ĤEinst (x) + Ĥψ ] = ΛV − W ef f (170)
1
= lim √
→0
Λ
Z
Σ
3
1
d xp
det(E)
(C)
ĤEinst (x)
+
(C)
Ĥψ (x)
+O
1
3
Λ2
(171)
For this matter coupled theory, we once again have the basis states
|j, i, r, c, ψi. The spatial SU (2) representation and intertwiners gives the
edges and nodes which are represented j and i, while r and c are the representation and intertwiners of G. There is a basis state of the fermion Hilbert
space at every node, the nodes carry a representation of SU (2) × G that is
finite dimensional, and is spanned by the operator ψ and its conjugate momentum. As with the matter-less case, we have that the diffeomorphism
invariant Hilbert30 space Hdif f is composed by the Hilbert spaces labelled
by Hdif f,Γ , which is the Hilbert space of diffeomorphism invariant states
with support on Γ. The regulated quantum Hamiltonian that acts on Hdif f
and corresponds to the operator W defined earlier. Since we are choosing a
regularisation that preserves the graph of a state, we can define the operators W
Γ which are just the elements of the decomposition of the Hamiltonian
P
W = Γ WΓ . The individual operators WΓ acts only on the corresponding
Hilbert space Hdif f,Γ , and on these Hilbert spaces we can also define the
operators OΓ that correspond to observables and their algebra.
While the regularisation of the gravitational part of Hamiltonian will be
excluded for brevity, the specific regularisation of the fermionic term will be
looked at in detail to facilitate the proof that will be covered later. Once the
foilation of the spacetime has been fixed, we can express the Hamiltonian
of the fermion term by integrating over the surface Σ as (172). We can
then regularise it as (173), with σ(S)AB being the smearing of the spinor
a
representation of the triad σCD
([36],[35]) over a 2-dimensional surface (174)
30
“This is the spatially diffeomorphism invariant physical Hilbert space based on gauge
fixing to a constant clock field T .” [34]
56
which has a base point p. The couple (n, â) is an edge from a node n to a
vertex that is adjacent to it â. U (γp,S(y) ) is then SU (2) parallel propagator
from the point p to the point on the surface S(y) (and U (n, â) is the same
over (n, â)). V (n, â) on the other hand defines parallel transport for the
group G. S(n, â) are picked for this regularisation so that “it is defined as a
surface that crosses that edge [(n, â)] once infinitesimally close to the node
n base pointed at the intersection point”.[34] lpl is the lattice spacing of
planck length.
Z
Z
1 (C)
1 α aA
ψ
H =
Hψ =
ΠA σ B (Da Ψ)B
(172)
α
Σ e
Σ e
ψ
H ψ → Hreg,Γ
=
1 X
Π(n)αA σ[S(n, â)]A B U (n, â)B C V (n, â)α β ψ(n + â)Cβ
lpl
(n,â)
(173)
Z
σ(S)AB =
S
−1
a
d2 y na σCD
U (γp,S(y) )A C U (γp,S(y)
)B
D
(174)
We now define the conjugate momentum operator of the fermions. The
operator is defined so that it acts node by node such that we have a momentum operator πnA that acts on the Hilbert space of fermions at n for each
node. Thus its action on a state in Hdif f,Γ is defined as (175), where it has
been smeared by a test function sA .
Z
X
d3 xsA (x)ΠA (x) =
sA (n)πn A
(175)
Σ
xn
LT
The LGT Hilbert space for a graph Γ is labelled as Hdif
f,Γ , has an inner
LT
product, a Hamiltonian HΓ that acts on the space as well as an algebra
of operators OΓLT , and a basis |r, c, ψi. We now desire to construct the two
maps, one from LQG to LGT and one from LGT to LQG. We call the the
map from LQG to LGT the “Degravitating map” which is defined by (176),
and the map from LGT to LQG the“Dressings Map” FΓ defined by (178).
By definition this then gives us the requirement that the two maps satisfy the
equation GΓ ◦ FΓ = I. The degravitating map can be though of as the map
that essentially removes the degrees of freedom corresponding to gravity
(i.e. removing the labels i and j) so that we have (177). The dressings
map is then the map that inserts these degrees of freedom. Constructing
both maps is necessary as we cannot get the dressing map directly from the
degravitating map. We desire the action of the dressings map on a state to
be (179), where φΓ [j, i; r, c, ψ] are amplitudes that are chosen.
57
LT
GΓ : Hdif f,Γ → Hdif
f,Γ
(176)
GΓ |j, i, r, c, ψi = |r, c, ψi
(177)
LT
FΓ : Hdif
f,Γ → Hdif f,Γ
X
FΓ |r, c, ψi =
φΓ [j, i; r, c, ψ]|j, i, r, c, ψi
(178)
(179)
j,i
LT
We can also express the dressing map as χ → χ × Φ0Γ for χ ∈ Hdif
f,Γ
and χ × Φ0Γ ∈ Hdif f,Γ . The degravitating map can be thought of in a similar
manner. What we want to find is the appropriate Φ0Γ for a given χ. To do
this we return to the states in LQG and try to expand around the gravitational degrees of freedom using the Born-Oppenheimer approximation on
the lattice, and must start by defining a ground state given a particular Γ.
ΨΓ [4, i, j] = h0, Γ|4, i, ji = δΓ,4 f (i, j)
(180)
(C)
Ĥgrav (x)
|0, Γi = Emin |0, Γi
lim p
→0
det(E)
(181)
Begin by defining the states with support on Γ by (180). To find the
background state Ψ0 [Γ] , we look for the state which gives us the least energy
when acted upon by the Hamiltonian constraint as in (181) so that we fix
the colouring i, j of the state |0, Γi. Once this state is found, we can expand
the states Ψ[Γ] with support on Γ around this background state so that
we have (183), where v is the volume operator regularised as (182). The
equation (181) for Φ0 fixes the values Γ, i and j, thus χ is a wave function
for the fermion basis states |r, c, φi. (The term a in the equation is a coupling
constant)
Z p
v = lim h0, Γ|
det(E)|0, Γi
(182)
→0
Ψ[Γ] = e
Σ
√
i aΛ v
Ψ0 [Γ]χ[Γ]
(183)
From here we can return to the expanded Hamiltonian constraint (168),
and use the Born-oppenheimer approximation so that we get the equation
(184). In this approximation to the first order ∂Ψ∂τ0 [Γ] is ignored. The Hamiltonian (185) is then regulated and gives us (186), which is the LGT Hamila
tonian! (w(n,â)
is a vector that is tangent to (n, â), and we can drop the
Emin term without consequence)
i~∂χ[{Γ}, τ ]
= H matter χ[{Γ}, τ ]
∂τ
58
(184)
H
matter
1
1
= √ Emin + √ lim h0, Γ|
c Λ
c Λ →0
HΓΨGT =
Z
Σ
d3 x p
1
det(E)
(C)
Ĥψ,ren (x)|0, Γi (185)
1 X
a
σaAB V (n, â)α β Ψ(n + â)Bβ
π(n)αA w(n,â)
lpl
(186)
(n,â)
Therefore we have shown how to remove the gravitational degrees of
freedom, arriving at the LGT Hamiltonian and thus have the degravitating map. Although we have done this for the fermions, a similar method
applies to the Yang Mills fields. To get the dressing map, we need to define the dressing states Φ0Γ appropriately so that the spectrum of states for
the Hamiltonian in the (approximated) LQG theory and LGT Hamiltonian
correspond in the sense that (187), so that we get back the Hamiltonian
(173). Thus we enforce the two equations for the dressing states (188) and
(189) so that the Hamiltonians will correspond correctly. It is also required
that the volume of the cells are equal so we have that (190). Now that we
have defined the dressing states, we have the dressing map. Now that we
have the maps between LQG and LGT, and we know that the spectrum of
the states (at least in the Born-Oppenheimer approximation of LQG) are
identical, the doubling of the fermions in LGT extends to LQG.
Ψ
hχ|hΦ0Γ |HregΓ
|Φ0Γ i|χi = hχ|HΓΨGT |χi
(187)
a
hΦ0Γ |σ[S(n, â)]AB |Φ0Γ i = w(n,â)
σaAB
(188)
hΦ0Γ |U (n, â)B C |Φ0Γ i
= δB
1
1
hΦ0Γ | |Φ0Γ i = 0 = 1
e
e
6.3
C
(189)
(190)
Possible Resolutions
There could be possible ways to resolve this issue, and the most obvious
initial attempt would be to use the methods from LGT in LQG, such as Wilson’s fermions or staggered fermions. Usually these method involve breaking
one of the assumptions of the no-go theorem, for example, Wilson’s fermions
foregoes chiral invariance in the lattice action. Another possibility is that
the Hamiltonian is not quadratic in terms of the fields, i.e. there are higher
order terms. Usually this would be prohibited as higher order terms would
cause UV divergences to arise, but LQG has a natural cutoff due to the
discretisation of space and so such terms are allowed. This would again
violate one of the requirements of the Nielsen-Ninomiya theorem and it may
59
be possible that there are higher order terms giving a theorem who’s spectrum does not double. There are other possibilities which are covered in the
source [34].
A paper published by R. Gambini and J. Pullin [37] gave proved an
example of how fermion doubling might be avoided in the spherically symmetric two dimensional case. First, they show the fermion doubling using
a method that Susskind uses, which is different from the one earlier in this
section. They then assert that in the quantum theory, we consider a superposition of spin network states (of matter coupled spacetime) which vary
in the distances between the vertices. This causes extra factors of lattice
spacing in the equation, as well as extra integration over the spacing. The
fermion doubling problem is then shown to be avoided in this special. Thus
allowing the inclusion of chiral fermions in LQG. However this remains to
be proven in the 3 + 1 spacetime.[37]
60
7
Conclusion
Loop Quantum Gravity has been, and still remains, one of the main approaches used in the search for a robust model of quantum gravity. As
there often is in a given field of research, there are different versions of Loop
Quantum Gravity itself, depending on the formulations used.
Hamiltonian Loop Quantum Gravity, the subject of this dissertation, has
tried to tackle the problem of quantum gravity by direct application from the
theories of general relativity and quantum mechanics. By using the canonical
pair for general relativity as prescribed by Ashtekar, this field of research has
been progressing steadily for the last two decades with encouraging results.
Chapter 5 of this dissertation highlights two of the consistency issues
with regard to the Hamiltonian in this formulation. Firstly, the ‘ultralocality’ of the Hamiltonian operator using the regularisation by Thiemann makes
it difficult to have a dynamics theory with long range correlations. Secondly
the weak closure of the quantum algebra hinders the recovery of spacetime
diffeomorphism invariance. The master constraint was introduced at the
level of the classical theory as a replacement for the Hamiltonian constraint
to try and alleviate these problems.
Barnett and Smolin [34] have shown the fermion doubling problem to
exist in LQG at least in the low energy approximation, due to the fact that
the fermion spectrum from LGT can be mapped onto LQG in this regime.
This once again presents a problem that contradicts reality, however the may
be several ways out, either from LGT or by new methods to be employed
by LQG such as considering the superposition of lattices [37].
Another version of Loop Quantum Gravity, which has not been discussed
here, is the spinfoam formulation of quantum gravity. This can be thought
of as the “sum over histories” version of Loop Quantum Gravity, and started
off as an attempt to circumvent the problems arising from the Hamiltonian
method. However this theory is also not without problems of its own which
need to be addressed [38].
At present, the Hamiltonian and other current theories of Loop Quantum Gravity do not satisfactorily explain quantum gravity because of various apparent inconsistencies inherent in their formulations. However, Loop
Quantum Gravity has encountered some favourable outcomes in application
to cosmology. For example, Loop Quantum Cosmology as had some success
in repeating the calculation of black hole entropy and has been useful in
modelling of the inflationary epoch of the universe.
61
Despite the fact that general relativity and quantum physics have been
around for decades on end, to date, we still have been unable to come up
with a consistent theory of quantum gravity. However, the idea of quantising
gravity still continues to be an attractive area of research as much of this
field remains a puzzle despite the effort that is poured into it. Indeed,
more work needs to be done to address remaining inconsistencies and to
see if Loop Quantum Gravity remains one of the preferred approaches to
quantum gravity.
62
References
[1] R. Arnowitt, S. Deser, and C. W. Misner, Chapter 7 of ‘Gravitation:
An Introduction to current Research’, pp. 227–264. Wiley, 1962. L.
Witten, ed.
[2] T. Thiemann, Modern Canonical Quantum General Relativity. Cambridge Monographs on Mathematical Physics, Cambridge University
Press, September 2007.
[3] P. A. M. Dirac, Lectures On Quantum Mechanics. Belfer Graduate
School of Science, Yeshiva University, New York, 1964.
[4] P. A. M. Dirac, “The theory of gravitation in hamiltonian form,” Proceedings of the Royal Society of London A: Mathematical, Physical and
Engineering Sciences, vol. 246, no. 1246, pp. 333–343, 1958.
[5] R. Gambini and J. Pullin, Loops, Knots, Gauge Theories and Quantum
Gravity:. Cambridge Monographs on Mathematical Physics, Cambridge
University Press, November 1996.
[6] A. Ashtekar, “New variables for classical and quantum gravity,” Phys.
Rev. Lett., vol. 57, pp. 2244–2247, November 1986.
[7] J. F. Barbero G., “Real ashtekar variables for lorentzian signature
space-times,” Phys. Rev. D, vol. 51, pp. 5507–5510, May 1995.
[8] J. Samuel, “Is barbero’s hamiltonian formulation a gauge theory of
lorentzian gravity?,” Classical and Quantum Gravity, vol. 17, pp. L141–
L148, August 2000.
[9] M. Geiller, M. Lachièze-Rey, and K. Noui, “A new look at lorentzcovariant loop quantum gravity,” Phys. Rev. D, vol. 84, p. 044002,
August 2011.
[10] C. Rovelli, Quantum Gravity. Cambridge Monographs on Mathematical
Physics, Cambridge University Press, November 2004.
[11] R. Giles, “Reconstruction of gauge potentials from wilson loops,” Phys.
Rev. D, vol. 24, pp. 2160–2168, Oct 1981.
[12] R. Gambini and J. Pullin, A First Course in Loop Quantum Gravity.
Oxford University Press, 2011.
[13] H. Nicolai, K. Peeters, and M. Zamaklar, “Loop quantum gravity:
an outside view,” Classical and Quantum Gravity, vol. 22, no. 19,
pp. R193–R247, 2005.
63
[14] W. Fairbairn and C. Rovelli, “Separable Hilbert space in loop quantum
gravity,” J. Math. Phys., vol. 45, pp. 2802–2814, July 2004.
[15] C. Rovelli and L. Smolin, “Spin networks and quantum gravity,” Phys.
Rev. D, vol. 52, pp. 5743–5759, November 1995.
[16] C. Rovelli and M. Gaul, Loop Quantum Gravity and the Meaning of
Diffeomorphism Invariance, pp. 277–324. Berlin, Heidelberg: Springer
Berlin Heidelberg, 2000.
[17] S. Frittelli, L. Lehner, and C. Rovelli, “The complete spectrum of the
area from recoupling theory in loop quantum gravity,” Classical and
Quantum Gravity, vol. 13, pp. 2921–2931, November 1996.
[18] R. De Pietri and C. Rovelli, “Geometry eigenvalues and the scalar product from recoupling theory in loop quantum gravity,” Phys. Rev. D,
vol. 54, pp. 2664–2690, August 1996.
[19] T. Thiemann, “Anomaly-free formulation of non-perturbative, fourdimensional lorentzian quantum gravity,” Physics Letters B, vol. 380,
pp. 257 – 264, July 1996.
[20] A. Ashtekar, J. D. Romano, and R. S. Tate, “New variables for gravity:
Inclusion of matter,” Phys. Rev. D, vol. 40, pp. 2572–2587, October
1989.
[21] T. Thiemann, “Quantum spin dynamics (qsd): V. quantum gravity as
the natural regulator of the hamiltonian constraint of matter quantum
field theories,” Classical and Quantum Gravity, vol. 15, pp. 1281–1314,
May 1998.
[22] T. Thiemann, “Kinematical hilbert spaces for fermionic and higgs quantum field theories,” Classical and Quantum Gravity, vol. 15, pp. 1487–
1512, June 1998.
[23] L. Smolin, “The classical limit and the form of the hamiltonian constraint in nonperturbative quantum gravity,” eprint, September 1996.
arXiv: gr-qc/9609034.
[24] T. Thiemann, Loop Quantum Gravity: An Inside View, pp. 185–263.
Berlin, Heidelberg: Springer Berlin Heidelberg, 2007.
[25] T. Thiemann, “The phoenix project: master constraint programme for
loop quantum gravity,” Classical and Quantum Gravity, vol. 23, no. 7,
pp. 2211–2247, 2006.
[26] J. Lewandowski and D. Marolf, “Loop constraints: A Habitat and their
algebra,” Int. J. Mod. Phys., vol. D7, pp. 299–330, 1998.
64
[27] T. Thiemann, “Quantum spin dynamics: Viii. the master constraint,”
Classical and Quantum Gravity, vol. 23, pp. 2249–2265, March 2006.
[28] H. Rothe, Lattice Gauge Theories: An Introduction. Lecture notes in
physics, World Scientific, 1992.
[29] J. Smit, Introduction to Quantum Fields on a Lattice. Cambridge University Press, 2002. Cambridge Books Online.
[30] I. Montvay and G. Münster, Quantum Fields on a Lattice:. Cambridge
Monographs on Mathematical Physics, Cambridge University Press,
March 1994.
[31] A. Chodos and J. Healy, “Spectral degeneracy of the lattice dirac equation as a function of lattice shape,” Nuclear Physics B, vol. 127, no. 3,
pp. 426 – 446, 1977.
[32] J. Kogut and L. Susskind, “Hamiltonian formulation of wilson’s lattice
gauge theories,” Phys. Rev. D, vol. 11, pp. 395–408, January 1975.
[33] H. Nielsen and M. Ninomiya, “A no-go theorem for regularizing chiral
fermions,” Physics Letters B, vol. 105, pp. 219 – 223, January 1981.
[34] J. Barnett and L. Smolin, “Fermion doubling in loop quantum gravity,”
eprint, July 2015. arXiv: 1507.01232v1 [gr-qc].
[35] H. A. Morales-Tecotl and C. Rovelli, “Fermions in quantum gravity,”
Phys. Rev. Lett., vol. 72, pp. 3642–3645, June 1994.
[36] C. Rovelli and L. Smolin, “The Physical Hamiltonian in nonperturbative quantum gravity,” Phys. Rev. Lett., vol. 72, pp. 446–449, 1994.
[37] R. Gambini and J. Pullin, “No fermion doubling in quantum geometry,”
Physics Letters B, vol. 749, pp. 374 – 375, October 2015.
[38] A. Perez, “The spin-foam approach to quantum gravity,” Living Reviews in Relativity, vol. 16, February 2013. accessed on 05 September
2016.
65