
OPERATING IN THE ROBOTIC MATRIX TRACY MCINTYRE and
... benefits it…then there would be no need with of apprentices for the master workers or of the slaves for the lords.” In 320 B.C., Aristotle made this famous quote about the idea of robotics. Even then, the idea of a machine doing human work was a possible affirmation. So what is robotics? Robotics is ...
... benefits it…then there would be no need with of apprentices for the master workers or of the slaves for the lords.” In 320 B.C., Aristotle made this famous quote about the idea of robotics. Even then, the idea of a machine doing human work was a possible affirmation. So what is robotics? Robotics is ...

Automatic design and Manufacture of Robotic Lifeforms
... physical artifacts that are (a) functional in the real world, (b) diverse in architecture (possibly each slightly different), and (c) producible in short turn-around time, low cost and large quantities. So far these requirements have not been met8. The experiments described here use evolutionary com ...
... physical artifacts that are (a) functional in the real world, (b) diverse in architecture (possibly each slightly different), and (c) producible in short turn-around time, low cost and large quantities. So far these requirements have not been met8. The experiments described here use evolutionary com ...
Ten Years of the AAAI Mobile Robot Competition and Exhibition
... mix of participants evolved to include a larger proportion of undergraduates from a broader selection of universities, including teaching colleges such as Swarthmore. This trend probably reflects the pervasiveness and accessibility of AI and robotics technologies. Recently, with the addition of new ...
... mix of participants evolved to include a larger proportion of undergraduates from a broader selection of universities, including teaching colleges such as Swarthmore. This trend probably reflects the pervasiveness and accessibility of AI and robotics technologies. Recently, with the addition of new ...
Metrics and benchmarks in human-robot interaction: Recent
... case is slightly less transparent. Some respondents gave more than one discipline keyword, but the majority (58%) decided to only give one discipline with which they affiliate. 16% of participants listed even more than two discipline keywords. The non-primary disciplines again included humanrobot in ...
... case is slightly less transparent. Some respondents gave more than one discipline keyword, but the majority (58%) decided to only give one discipline with which they affiliate. 16% of participants listed even more than two discipline keywords. The non-primary disciplines again included humanrobot in ...

Form, function and the matter of experience
... program that did something interestingly cognitive have been asked the question; but does it know what it is doing? Does it know that it is doing something? Turing (1950) discussed this question under the heading ‘the argument from consciousness’, and attributed it to Professor Jefferson who spoke a ...
... program that did something interestingly cognitive have been asked the question; but does it know what it is doing? Does it know that it is doing something? Turing (1950) discussed this question under the heading ‘the argument from consciousness’, and attributed it to Professor Jefferson who spoke a ...


The Frankenstein Complex and Asimov`s Three Laws
... Asimov believed that his “Three Laws of Robotics” were being taken seriously by robotics researchers of his day and that they would be present in any advanced robots as a matter of course (Asimov 1978; Asimov 1990). In preparation for this writing, a handful of emails were sent out asking current ro ...
... Asimov believed that his “Three Laws of Robotics” were being taken seriously by robotics researchers of his day and that they would be present in any advanced robots as a matter of course (Asimov 1978; Asimov 1990). In preparation for this writing, a handful of emails were sent out asking current ro ...

Elephants Don`t Play Chess - People.csail.mit.edu
... source for some small time period, but now the suppressing message is gated through and it masquerades as having come from the original source. A continuous supply of suppressing messages is required to maintain control of a side-tapped wire. Inhibition and suppression are the mechanisms by which co ...
... source for some small time period, but now the suppressing message is gated through and it masquerades as having come from the original source. A continuous supply of suppressing messages is required to maintain control of a side-tapped wire. Inhibition and suppression are the mechanisms by which co ...

Elephants Don`t Play Chess
... source for some small time period, but now the suppressing message is gated through and it masquerades as having come from the original source. A continuous supply of suppressing messages is required to maintain control of a side-tapped wire. Inhibition and suppression are the mechanisms by which co ...
... source for some small time period, but now the suppressing message is gated through and it masquerades as having come from the original source. A continuous supply of suppressing messages is required to maintain control of a side-tapped wire. Inhibition and suppression are the mechanisms by which co ...
Brief History of Artificial Intelligence - OCW
... A.M. Turing published "Computing Machinery and Intelligence" (1950). - Introduction of Turing's Test as a way of operationalizing a test of intelligent behavior. I propose to consider the question, "Can Machines Think?" ...
... A.M. Turing published "Computing Machinery and Intelligence" (1950). - Introduction of Turing's Test as a way of operationalizing a test of intelligent behavior. I propose to consider the question, "Can Machines Think?" ...
Encyclopedia of Artificial Intelligence
... Product or company names used in this set are for identification purposes only. Inclusion of the names of the products or companies does not indicate a claim of ownership by IGI Global of the trademark or registered trademark. Library of Congress Cataloging-in-Publication Data Encyclopedia of artifi ...
... Product or company names used in this set are for identification purposes only. Inclusion of the names of the products or companies does not indicate a claim of ownership by IGI Global of the trademark or registered trademark. Library of Congress Cataloging-in-Publication Data Encyclopedia of artifi ...
The AAAI 2006 Mobile Robot Competition and
... about the environment, each scavenger hunt entry was required to try to create and convey one or more representations of its surroundings. Many such “maps” were possible, for example, traditional dense maps, sparse, loosely connected collections of landmark locations, networks of learned parameters, ...
... about the environment, each scavenger hunt entry was required to try to create and convey one or more representations of its surroundings. Many such “maps” were possible, for example, traditional dense maps, sparse, loosely connected collections of landmark locations, networks of learned parameters, ...

here - FER
... that store a reward value for every possible state-action combination become unfeasible. Another issue is that the behaviour of one agent influences the outcomes of other agents’ individually selected actions, thus incurring change in the environment and possibly compromising convergence [15]. The d ...
... that store a reward value for every possible state-action combination become unfeasible. Another issue is that the behaviour of one agent influences the outcomes of other agents’ individually selected actions, thus incurring change in the environment and possibly compromising convergence [15]. The d ...
MIT Mobile Robots - What`s Next? - DSpace@MIT
... performed in a distributed fashion. A recently developed light striper vision system will be able to provide depth maps in real time to enable parallel recognition of a number of different types of objects. Each object class has its own special processor to recognize it. When the table-like-object r ...
... performed in a distributed fashion. A recently developed light striper vision system will be able to provide depth maps in real time to enable parallel recognition of a number of different types of objects. Each object class has its own special processor to recognize it. When the table-like-object r ...

Towards a theory of Hybrid Intelligent Autonomous Systems
... position of the next object and the required task must be determined. This can vary unpredictably at least from the robots point of view. One important area of robotics research is to enable the robot to cope with its environment whether this is on land, underwater, in the air, underground, or in sp ...
... position of the next object and the required task must be determined. This can vary unpredictably at least from the robots point of view. One important area of robotics research is to enable the robot to cope with its environment whether this is on land, underwater, in the air, underground, or in sp ...

WORD - Semiosis Evolution Energy
... are often self-organizing in the sense that they ‘learn’, ‘develop’ and ‘evolve’ in interaction with their environments, using computational intelligence techniques and often attempting to mimic biological processes. Some examples of this type of self-organization in adaptive robots will be illustra ...
... are often self-organizing in the sense that they ‘learn’, ‘develop’ and ‘evolve’ in interaction with their environments, using computational intelligence techniques and often attempting to mimic biological processes. Some examples of this type of self-organization in adaptive robots will be illustra ...
Adoption of Artificial Intelligence in Agriculture
... use many sensors for collecting and transmitting data related to farm machinery (location, technical functions, productivity, fuel consumptions etc.) and about rate application of seeds, fertilizer, water, pesticides, and forages. There are also commercially available sensors able to measure continu ...
... use many sensors for collecting and transmitting data related to farm machinery (location, technical functions, productivity, fuel consumptions etc.) and about rate application of seeds, fertilizer, water, pesticides, and forages. There are also commercially available sensors able to measure continu ...
Robot soccer competitions. Learn about 2002 year class project. In
... Goal: to culminate all the challenges in AI like temporal reasoning, machine learning, vision processing, obstacle avoidance, perception, cognition and motion control ...
... Goal: to culminate all the challenges in AI like temporal reasoning, machine learning, vision processing, obstacle avoidance, perception, cognition and motion control ...
Ryan Whitehead Bot Talk In my project, “Bot Talk” we see the
... Bot Talk In my project, “Bot Talk” we see the change in text bots as they are asked different questions, learn from past conversations and are asked tough questions. First, my project is all about bots. “Bots” or “robots”, are simply artificial intelligence. In this case it is just a bot that can ho ...
... Bot Talk In my project, “Bot Talk” we see the change in text bots as they are asked different questions, learn from past conversations and are asked tough questions. First, my project is all about bots. “Bots” or “robots”, are simply artificial intelligence. In this case it is just a bot that can ho ...
anglais - La Jaune et la Rouge
... I began my AI research on back in the late 1970s. If we had improved air travel as fast I would fly from London to Sydney in less than a tenth of a second. As well as more powerful computers, we have learned how to write software that “learns” to get better, “understands” human speech, and “navigate ...
... I began my AI research on back in the late 1970s. If we had improved air travel as fast I would fly from London to Sydney in less than a tenth of a second. As well as more powerful computers, we have learned how to write software that “learns” to get better, “understands” human speech, and “navigate ...
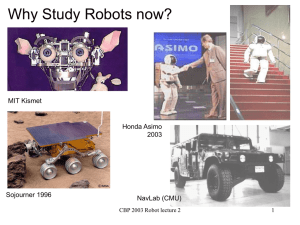
Comp 1017 Robots
... CBP 2003 Robot lecture 2 Figure from ROBOT, Moravec, Oxford, 1998, Chapter 3: Power and Presence, page 68 ...
... CBP 2003 Robot lecture 2 Figure from ROBOT, Moravec, Oxford, 1998, Chapter 3: Power and Presence, page 68 ...

Robotics and Autonomous Systems in the 50th Anniversary of
... Artificial Intelligence has been roughly divided into two schools of thought since its beginning: the symbolic and the subsymbolic one. These two approaches have also had strong influence on the robotics field. The first article “From bioinspired vs. psycho-inspired to etho-inspired robots?” by J.M. ...
... Artificial Intelligence has been roughly divided into two schools of thought since its beginning: the symbolic and the subsymbolic one. These two approaches have also had strong influence on the robotics field. The first article “From bioinspired vs. psycho-inspired to etho-inspired robots?” by J.M. ...

Science AMA Series: I`m Nadia Thalmann, head of the MIRALab
... many situations (personal assistant). I also work for creating 3D virtual worlds, where we can see ancient decors and interact with ancient people. I am also interested in the medical field. I work with medical doctors and patients for simulating articulations. All my research can be seen on www.mir ...
... many situations (personal assistant). I also work for creating 3D virtual worlds, where we can see ancient decors and interact with ancient people. I am also interested in the medical field. I work with medical doctors and patients for simulating articulations. All my research can be seen on www.mir ...

2- B Grade Step 1 The Challenge (Edic, Danna P., Luis Alberto
... To make our project we used a cell phone with the Blockly App., a robot (Dash), and a poster made with a design of the Butterfly Life Cycle done on Paint. Step 3 Explore (Laura, Eugenio, Leonardo; Juliana) We investigated about robots and learned that a robot is a mechanical device controlled by a c ...
... To make our project we used a cell phone with the Blockly App., a robot (Dash), and a poster made with a design of the Butterfly Life Cycle done on Paint. Step 3 Explore (Laura, Eugenio, Leonardo; Juliana) We investigated about robots and learned that a robot is a mechanical device controlled by a c ...

Social Robots: Approaches and Conceptions in the Perspective of
... and cultural interfaces But what caused this rule of machines – from clocks to computers and robots? The simple answer would be: there are forces and facilities that the human can cope with only by delegating control to devices superior than man in some important functions. For example, long-term m ...
... and cultural interfaces But what caused this rule of machines – from clocks to computers and robots? The simple answer would be: there are forces and facilities that the human can cope with only by delegating control to devices superior than man in some important functions. For example, long-term m ...
Robotics

Robotics is the branch of mechanical engineering, electrical engineering, electronic engineering and computer science that deals with the design, construction, operation, and application of robots, as well as computer systems for their control, sensory feedback, and information processing.These technologies deal with automated machines that can take the place of humans in dangerous environments or manufacturing processes, or resemble humans in appearance, behavior, and/or cognition. Many of today's robots are inspired by nature contributing to the field of bio-inspired robotics.The concept of creating machines that can operate autonomously dates back to classical times, but research into the functionality and potential uses of robots did not grow substantially until the 20th century. Throughout history, it has been frequently assumed that robots will one day be able to mimic human behavior and manage tasks in a human-like fashion. Today, robotics is a rapidly growing field, as technological advances continue; researching, designing, and building new robots serve various practical purposes, whether domestically, commercially, or militarily. Many robots do jobs that are hazardous to people such as defusing bombs, mines and exploring shipwrecks.