
Document
... – compute, e.g., pattern recognition – act, e.g., move, release chemicals, communicate • plausible extrapolation of current nanotechnology ...
... – compute, e.g., pattern recognition – act, e.g., move, release chemicals, communicate • plausible extrapolation of current nanotechnology ...

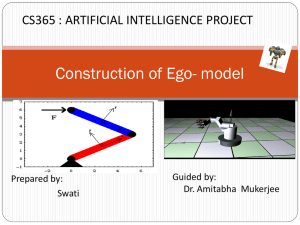
A framework for making sophisticated robotics accessible
... is that every robot platform comes with its own, often proprietary, development tools that are substantially different from other platforms. Often the primary programming languages used are different as well. More problematic may be a complete change in paradigm from one robot to another. Consequent ...
... is that every robot platform comes with its own, often proprietary, development tools that are substantially different from other platforms. Often the primary programming languages used are different as well. More problematic may be a complete change in paradigm from one robot to another. Consequent ...

MIT mobile robots-what`s next? - Cooperative Robotics Research
... project was initially outlined in [Brooks, Connell and Flynn 19861 and more recent progress is discussed in [Brooks, Connell and Ning 19881. Herbert’s microprocessor network emphasizes the fact that there really is no common memory, bus, switch or central controller. Rather, the processors are wired ...
... project was initially outlined in [Brooks, Connell and Flynn 19861 and more recent progress is discussed in [Brooks, Connell and Ning 19881. Herbert’s microprocessor network emphasizes the fact that there really is no common memory, bus, switch or central controller. Rather, the processors are wired ...
How Robots Work
... light and detects the signal's reflection. The robot locates the distance to obstacles based on how long it takes the signal to bounce back. More advanced robots use stereo vision to see the world around them. Two cameras give these robots depth perception, and image-recognition software gives them ...
... light and detects the signal's reflection. The robot locates the distance to obstacles based on how long it takes the signal to bounce back. More advanced robots use stereo vision to see the world around them. Two cameras give these robots depth perception, and image-recognition software gives them ...

the first of a series of anthropomimetic musculoskeletal upper torsos
... the requirement for a humanoid robot that mimics as closely as possible the mechanical structures of the human body. There are obvious difficulties in achieving this requirement, especially since much current technology cannot yet perform at the level of its biological counterparts. For example, the ...
... the requirement for a humanoid robot that mimics as closely as possible the mechanical structures of the human body. There are obvious difficulties in achieving this requirement, especially since much current technology cannot yet perform at the level of its biological counterparts. For example, the ...
Slides - CSE IITK
... “Obstacle Avoidance Control of Humanoid Robot Arm through Tactile Interaction” by Dzmitry Tsetserukou, Naoki Kawakami, Susumu Tachi “The advantages of mounting a camera on robot arm” by Radu Horaud, Roger Mohr, Fadi Dornaika, and Boubakeur Boufama In 2006 IEEE Intl. Conference on Robotics and ...
... “Obstacle Avoidance Control of Humanoid Robot Arm through Tactile Interaction” by Dzmitry Tsetserukou, Naoki Kawakami, Susumu Tachi “The advantages of mounting a camera on robot arm” by Radu Horaud, Roger Mohr, Fadi Dornaika, and Boubakeur Boufama In 2006 IEEE Intl. Conference on Robotics and ...
The History of Artificial Intelligence
... Some references state that term "robot" was derived from the Czech word robota, meaning "work", while others propose that robota actually means "forced workers" or "slaves." This latter view would certainly fit the point that Capek was trying to make, because his robots eventually rebelled against t ...
... Some references state that term "robot" was derived from the Czech word robota, meaning "work", while others propose that robota actually means "forced workers" or "slaves." This latter view would certainly fit the point that Capek was trying to make, because his robots eventually rebelled against t ...
File - Operating In The Robotic Matrix
... Every year, robotic design changes and we find new uses for robots. Will there be a time when robots will complete all physical labor for humans and humans will not be required to work? ...
... Every year, robotic design changes and we find new uses for robots. Will there be a time when robots will complete all physical labor for humans and humans will not be required to work? ...
Addressing Sustainability via AI - Report from the 23rd International
... this technique’s future use in a video, where an AI system could recognize and predict the actions of a vision-impaired person based on the data collected from his movements, tell him his own position, describe the objects around him, give alerts of possible dangers, and send out calls for further h ...
... this technique’s future use in a video, where an AI system could recognize and predict the actions of a vision-impaired person based on the data collected from his movements, tell him his own position, describe the objects around him, give alerts of possible dangers, and send out calls for further h ...
25-Concepts - My FIT (my.fit.edu)
... • Holonomic Robots (same # effective and controllable DOF) – a car has 3 effective but 2 controllable DOF • robotic arms are holonomic • mobile robots are not (more complex mechanics) ...
... • Holonomic Robots (same # effective and controllable DOF) – a car has 3 effective but 2 controllable DOF • robotic arms are holonomic • mobile robots are not (more complex mechanics) ...

Introduction
... associated literary works which ask, “What is a human being . . . and what isn’t?” Considerations include representations of utopias and dystopias, computer technologies and networks, artificial intelligence, reproductive technologies, virtual reality, and genetic engineering. The emphasis will be o ...
... associated literary works which ask, “What is a human being . . . and what isn’t?” Considerations include representations of utopias and dystopias, computer technologies and networks, artificial intelligence, reproductive technologies, virtual reality, and genetic engineering. The emphasis will be o ...

What mechanisms underlie dyadic cooperation?
... 1 Natural and Artificial Cognition Laboratory, University of Naples, Via Porta di Massa 1, Naples, Italy - [email protected] ...
... 1 Natural and Artificial Cognition Laboratory, University of Naples, Via Porta di Massa 1, Naples, Italy - [email protected] ...

View PDF - Advances in Cognitive Systems
... 2011). This is capable of the remarkable feat of driving safely in urban traffic, but to do so requires careful preparation. For example, prior to autonomous driving, the car must be driven around a location manually so that the system can build very accurate maps that let it navigate and distinguis ...
... 2011). This is capable of the remarkable feat of driving safely in urban traffic, but to do so requires careful preparation. For example, prior to autonomous driving, the car must be driven around a location manually so that the system can build very accurate maps that let it navigate and distinguis ...
side event briefings - Campaign to Stop Killer Robots
... the Nobel Women’s Initiative, which she founded in 2006 together with five of her sister Nobel Peace laureates. In 2013, the University of California Press published her memoir. Williams and more than 20 of her fellow Nobel Peace laureates have issued a joint statement endorsing the call for a preem ...
... the Nobel Women’s Initiative, which she founded in 2006 together with five of her sister Nobel Peace laureates. In 2013, the University of California Press published her memoir. Williams and more than 20 of her fellow Nobel Peace laureates have issued a joint statement endorsing the call for a preem ...

Making Robots and Making Robots Intelligent
... and a driven ==> cart can turn or TIFFQuickTime™ (L ZW) d eco mpre ssor are nee ded to s ee this picture . go straight • Can measure distance to certain objects and detect lines Objective: Autonomously track a line or follow a wall. ==> Intelligence (action, not comprehension or communication) accom ...
... and a driven ==> cart can turn or TIFFQuickTime™ (L ZW) d eco mpre ssor are nee ded to s ee this picture . go straight • Can measure distance to certain objects and detect lines Objective: Autonomously track a line or follow a wall. ==> Intelligence (action, not comprehension or communication) accom ...
Behaviour-Based Control
... • through bottom up emergent process • through top-down control (see hybrid control lecture) ...
... • through bottom up emergent process • through top-down control (see hybrid control lecture) ...
CHAPT9-SocialRobotics
... expressions tend to be abrupt, occurring suddenly and rapidly, which rarely occurs in nature. The primary facial components used are mouth (lips), cheeks, eyes, eyebrows and forehead. Personality in social robots There is reason to believe that if a robot had a compelling personality, people would b ...
... expressions tend to be abrupt, occurring suddenly and rapidly, which rarely occurs in nature. The primary facial components used are mouth (lips), cheeks, eyes, eyebrows and forehead. Personality in social robots There is reason to believe that if a robot had a compelling personality, people would b ...
Artificial Intelligence
... These cells are known as neurons, each of which may connect with up to 200,000 other neurons and the power of the brain comes from the huge numbers of these basic components and the multiple connections between them. ...
... These cells are known as neurons, each of which may connect with up to 200,000 other neurons and the power of the brain comes from the huge numbers of these basic components and the multiple connections between them. ...

3 approaches to AI
... • See Lovelace objection from Turing test, ““The Analytical Engine has no pretensions to originate anything. It can do what ever we know how to order it to perform” (Lady Lovelace memoir ...
... • See Lovelace objection from Turing test, ““The Analytical Engine has no pretensions to originate anything. It can do what ever we know how to order it to perform” (Lady Lovelace memoir ...

to get the file - Mechanical and Materials Engineering
... The components of an intelligent robot are a manipulator, sensors and controls. However, it is the design architecture or the combination of these components, the paradigms programmed into the controller, the foresight and genius of the system marketing experts and designers, the practicality of the ...
... The components of an intelligent robot are a manipulator, sensors and controls. However, it is the design architecture or the combination of these components, the paradigms programmed into the controller, the foresight and genius of the system marketing experts and designers, the practicality of the ...

Building a multimodal human-robot interface
... mean. And they usually don’t repeat them as if they were grammatical, such as “Did you say, ‘Go to the’?” They simply confirm that an utterance was perceived and ask for additional information through the oneword utterance “What?” Whenever the system obtains a grammatical utterance, the appropriaten ...
... mean. And they usually don’t repeat them as if they were grammatical, such as “Did you say, ‘Go to the’?” They simply confirm that an utterance was perceived and ask for additional information through the oneword utterance “What?” Whenever the system obtains a grammatical utterance, the appropriaten ...

PDF
... human infant development. In the initial stages of the development, the robot organizes its action parameter space to form behavior primitives, and explore the environment with these primitives to learn basic object affordances such as graspability, pushability and rollability. After learning, the r ...
... human infant development. In the initial stages of the development, the robot organizes its action parameter space to form behavior primitives, and explore the environment with these primitives to learn basic object affordances such as graspability, pushability and rollability. After learning, the r ...


Moral and ethical questions for robotics public policy
... Korea, conversely, has developed a code of ethics for human-robot interaction, which attempts to define ethical standards that would be programmed into robots (7). Additionally, the code attempts to limit some potential abuses of robots by humans, although perhaps not to the extent that may be requi ...
... Korea, conversely, has developed a code of ethics for human-robot interaction, which attempts to define ethical standards that would be programmed into robots (7). Additionally, the code attempts to limit some potential abuses of robots by humans, although perhaps not to the extent that may be requi ...
Robotics

Robotics is the branch of mechanical engineering, electrical engineering, electronic engineering and computer science that deals with the design, construction, operation, and application of robots, as well as computer systems for their control, sensory feedback, and information processing.These technologies deal with automated machines that can take the place of humans in dangerous environments or manufacturing processes, or resemble humans in appearance, behavior, and/or cognition. Many of today's robots are inspired by nature contributing to the field of bio-inspired robotics.The concept of creating machines that can operate autonomously dates back to classical times, but research into the functionality and potential uses of robots did not grow substantially until the 20th century. Throughout history, it has been frequently assumed that robots will one day be able to mimic human behavior and manage tasks in a human-like fashion. Today, robotics is a rapidly growing field, as technological advances continue; researching, designing, and building new robots serve various practical purposes, whether domestically, commercially, or militarily. Many robots do jobs that are hazardous to people such as defusing bombs, mines and exploring shipwrecks.