AMAM Conference 2005
... [reeke89] G. Reeke, O. Sporns, Synthetic neural modeling: A multilevel approach to analysis of brain complexity [pfeifer97] R. Pfeifer, C. Schleier, Sensory-motor coordination: The metaphor and beyond: Practice and future of autonmous robots [schleier96] C. Schleier, D. Lambrinos, Categorization in ...
... [reeke89] G. Reeke, O. Sporns, Synthetic neural modeling: A multilevel approach to analysis of brain complexity [pfeifer97] R. Pfeifer, C. Schleier, Sensory-motor coordination: The metaphor and beyond: Practice and future of autonmous robots [schleier96] C. Schleier, D. Lambrinos, Categorization in ...
Introduction - Computer Science & Engineering
... – At most 30 minutes – Briefly summarize the paper – Discuss the paper, its strengths, weaknesses, any points ...
... – At most 30 minutes – Briefly summarize the paper – Discuss the paper, its strengths, weaknesses, any points ...
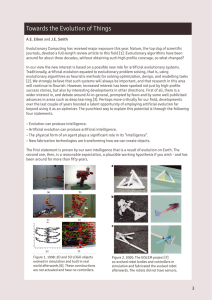
Towards the Evolution of Things
... The third statement reflects much more recent thinking [4], but raises the question of how we design both bodies and controllers. Designing these separately is a complex task, that becomes even more so when coupled. In the fourth lies part of the answer: if we can now rapidly and automatically fabri ...
... The third statement reflects much more recent thinking [4], but raises the question of how we design both bodies and controllers. Designing these separately is a complex task, that becomes even more so when coupled. In the fourth lies part of the answer: if we can now rapidly and automatically fabri ...
2008 Artificial Intelligence Conference 3
... Such challenges can help to elucidate core principles of intelligence. “Students are the future leaders of our field,” continues Horvitz, “and teaching and mentoring have served a critical role in AI. This year, the conference will include a multi-event Teaching Forum that will bring together educat ...
... Such challenges can help to elucidate core principles of intelligence. “Students are the future leaders of our field,” continues Horvitz, “and teaching and mentoring have served a critical role in AI. This year, the conference will include a multi-event Teaching Forum that will bring together educat ...

Using robots to investigate the evolution of adaptive behavior
... This approach to robotics has two major advantages over other approaches. First, it promises an automated method for yielding robots. A modern robot is composed of two main subsystems: its sensors, motors, and mechanical layout, roughly equivalent to an organism’s body plan; and its controller, whic ...
... This approach to robotics has two major advantages over other approaches. First, it promises an automated method for yielding robots. A modern robot is composed of two main subsystems: its sensors, motors, and mechanical layout, roughly equivalent to an organism’s body plan; and its controller, whic ...
Robotics? - OpenHouse @ DEIB
... What is Artificial Intelligence? «The field of theory & development of computer systems able to perform tasks normally assumed to require human intelligence to be performed» In short, how to make machines «smart/intelligent» : ...
... What is Artificial Intelligence? «The field of theory & development of computer systems able to perform tasks normally assumed to require human intelligence to be performed» In short, how to make machines «smart/intelligent» : ...
Term Project Color and Illumination Independent Landmark
... – The robot is placed at a location where it can see the landmark, and then a region is selected around the landmark to specify the region in which the robot should find the SURF features and associate them with that particular ...
... – The robot is placed at a location where it can see the landmark, and then a region is selected around the landmark to specify the region in which the robot should find the SURF features and associate them with that particular ...

Artificial intelligence - Pérez
... UK are working towards legislation for driverless cars and in the US, several states (Nevada, Florida, California, and Michigan) have already passed laws to allow the use of driverless cars. It is important to consider that, up until now, automated machines have only been present in a limited number ...
... UK are working towards legislation for driverless cars and in the US, several states (Nevada, Florida, California, and Michigan) have already passed laws to allow the use of driverless cars. It is important to consider that, up until now, automated machines have only been present in a limited number ...
Non-Traditional Projects in the Undergraduate AI Course
... for both software development (especially suitable for difficult-toprogram applications or for customizing software) and building intelligent software (i.e., a tool for AI programming). Our projects emphasize the relationship between AI and computer science in general, and software development in pa ...
... for both software development (especially suitable for difficult-toprogram applications or for customizing software) and building intelligent software (i.e., a tool for AI programming). Our projects emphasize the relationship between AI and computer science in general, and software development in pa ...
Cyberarts2002 - SIUE Computer Science
... • Things are not always used for what they are design to do – Arpanet (original Internet) was designed for robust communication in the event of a war. – We are now using it to order dog food and post pictures of our ...
... • Things are not always used for what they are design to do – Arpanet (original Internet) was designed for robust communication in the event of a war. – We are now using it to order dog food and post pictures of our ...

The History of Artificial Intelligence
... In 1991, DARPA reported that an AI-based logistics planning tool, DART, was used in military operations Desert Shield and Desert Storm which repaid decades of research. 1997 was a mile stone for Artificial Intelligence that showed the world the potential of computer software. IBM developed an Expert ...
... In 1991, DARPA reported that an AI-based logistics planning tool, DART, was used in military operations Desert Shield and Desert Storm which repaid decades of research. 1997 was a mile stone for Artificial Intelligence that showed the world the potential of computer software. IBM developed an Expert ...
1.5 Impact of emerging technologies
... Vision Enhancement uses video technology which is projected to the user though the lens. The system can bring distant objects closer and into focus. ...
... Vision Enhancement uses video technology which is projected to the user though the lens. The system can bring distant objects closer and into focus. ...

On Multi-Robot Area Coverage
... Reduced-CDT and Reduced-Vis based on the Constrained Delaunay Triangulation and the Visibility Graph are introduced so as to model the structure of the target area more efficiently. Also, due to the distributed characteristic of the coverage problem, another algorithm called Multi-Prim’s is applied ...
... Reduced-CDT and Reduced-Vis based on the Constrained Delaunay Triangulation and the Visibility Graph are introduced so as to model the structure of the target area more efficiently. Also, due to the distributed characteristic of the coverage problem, another algorithm called Multi-Prim’s is applied ...

Document
... to personal robots for advice, helping us with our daily tasks, or even depend on them to be there for support just like a friend. Many people fear this type of future might lead to the downfall of humans; they believe that the robots will take over the world. Even though that could be a possibility ...
... to personal robots for advice, helping us with our daily tasks, or even depend on them to be there for support just like a friend. Many people fear this type of future might lead to the downfall of humans; they believe that the robots will take over the world. Even though that could be a possibility ...
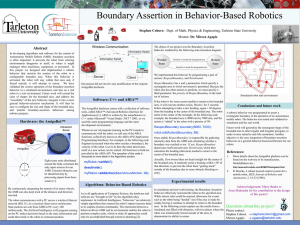
Poster title - Tarleton State University
... Eight sonar units distributed around the body constitute the only input sensors for our AMR. External obstacles can be identified only by processing inputs from these sonars [1]. ...
... Eight sonar units distributed around the body constitute the only input sensors for our AMR. External obstacles can be identified only by processing inputs from these sonars [1]. ...

Explaining robot actions - Advanced Technology Laboratories
... to produce the cost map. These algorithms look for the most influential cells on the robot’s route and determine what grid(s) correspond to the values of these cells. By understanding how those grids are constructed, we can determine what world information is most strongly affecting the robot’s beha ...
... to produce the cost map. These algorithms look for the most influential cells on the robot’s route and determine what grid(s) correspond to the values of these cells. By understanding how those grids are constructed, we can determine what world information is most strongly affecting the robot’s beha ...

Artificial Intelligence
... • Artificial muscles feature smart technology that allows them to function more like real muscles. • Penelope, a Robotic Surgery Assistant developed at Columbia University can not only pass the correct tools to doctors, but also keep track of these tools and learn about a doctor's preferences throug ...
... • Artificial muscles feature smart technology that allows them to function more like real muscles. • Penelope, a Robotic Surgery Assistant developed at Columbia University can not only pass the correct tools to doctors, but also keep track of these tools and learn about a doctor's preferences throug ...
How robots, artificial intelligence, and machine learning will affect
... employs dramatically fewer workers, we need to think about how to deliver benefits to displaced workers. The impacts of automation technologies are already being felt throughout the economy. The worldwide number of industrial robots has increased rapidly over the past few years. The falling prices o ...
... employs dramatically fewer workers, we need to think about how to deliver benefits to displaced workers. The impacts of automation technologies are already being felt throughout the economy. The worldwide number of industrial robots has increased rapidly over the past few years. The falling prices o ...
Living or not?
... form a rule to decide whether a machine such as a computer or robot, could be called intelligent. His test for artificial intelligence was to see whether or not a human could tell if they were interacting with a robot or another human being. 6. a) Create a test of your own that would help you decide ...
... form a rule to decide whether a machine such as a computer or robot, could be called intelligent. His test for artificial intelligence was to see whether or not a human could tell if they were interacting with a robot or another human being. 6. a) Create a test of your own that would help you decide ...
School of Computer Science CAP-XXXX Introduction to Mobile
... Be familiar with the different problems and domains of applications in mobile robotics Understand different locomotion modalities of mobile robots. Be able to understand and derive kinematic models for wheeled robots Exposure to the different kind of sensors that are used in mobile robots Familiarit ...
... Be familiar with the different problems and domains of applications in mobile robotics Understand different locomotion modalities of mobile robots. Be able to understand and derive kinematic models for wheeled robots Exposure to the different kind of sensors that are used in mobile robots Familiarit ...
Craig_lecture 7
... wheels, tracks, or legs Mobile robots typically move in 2D (but note that swimming and flying is 3D) Manipulators are various robot arms They can move from 1 to many D Think of the dimensions as the robot’s degrees of freedom (DOF) ...
... wheels, tracks, or legs Mobile robots typically move in 2D (but note that swimming and flying is 3D) Manipulators are various robot arms They can move from 1 to many D Think of the dimensions as the robot’s degrees of freedom (DOF) ...

From Imitation Learning to Innovation in Designing - Neuron
... robots perform a repetitive task in a very controlled environment, to mobile service robots operating in a wide variety of environments, often in human—habited ones. New applications for robots make grow many problems which must be solved in order to increase their autonomy. These problems are as sa ...
... robots perform a repetitive task in a very controlled environment, to mobile service robots operating in a wide variety of environments, often in human—habited ones. New applications for robots make grow many problems which must be solved in order to increase their autonomy. These problems are as sa ...
Weekly Report 1 Colin Luther
... find out which of the two can evolve to jump higher. The quadruped will be the robot from assignments 5-10, and the octopod will be a variation of that robot, having extra legs appended to each of its sides while still retaining its symmetry. I aim to find out whether the octopod’s four extra legs w ...
... find out which of the two can evolve to jump higher. The quadruped will be the robot from assignments 5-10, and the octopod will be a variation of that robot, having extra legs appended to each of its sides while still retaining its symmetry. I aim to find out whether the octopod’s four extra legs w ...
The History of Artificial Intelligence
... Some references state that term "robot" was derived from the Czech word robota, meaning "work", while others propose that robota actually means "forced workers" or "slaves." This latter view would certainly fit the point that Capek was trying to make, because his robots eventually rebelled against t ...
... Some references state that term "robot" was derived from the Czech word robota, meaning "work", while others propose that robota actually means "forced workers" or "slaves." This latter view would certainly fit the point that Capek was trying to make, because his robots eventually rebelled against t ...

Real Robots Don`t Drive Straight
... robots in contest events. They prefer imperative programming, in which they expect robots to reliably execute command actions. This approach leads to brittle designs, but even after this is demonstrated to the students, they resist adopting approaches that embrace feedback (Martin 1996). I was remin ...
... robots in contest events. They prefer imperative programming, in which they expect robots to reliably execute command actions. This approach leads to brittle designs, but even after this is demonstrated to the students, they resist adopting approaches that embrace feedback (Martin 1996). I was remin ...
Robotics

Robotics is the branch of mechanical engineering, electrical engineering, electronic engineering and computer science that deals with the design, construction, operation, and application of robots, as well as computer systems for their control, sensory feedback, and information processing.These technologies deal with automated machines that can take the place of humans in dangerous environments or manufacturing processes, or resemble humans in appearance, behavior, and/or cognition. Many of today's robots are inspired by nature contributing to the field of bio-inspired robotics.The concept of creating machines that can operate autonomously dates back to classical times, but research into the functionality and potential uses of robots did not grow substantially until the 20th century. Throughout history, it has been frequently assumed that robots will one day be able to mimic human behavior and manage tasks in a human-like fashion. Today, robotics is a rapidly growing field, as technological advances continue; researching, designing, and building new robots serve various practical purposes, whether domestically, commercially, or militarily. Many robots do jobs that are hazardous to people such as defusing bombs, mines and exploring shipwrecks.