Artificial Inelegance and Robotics
... to play a game of Pong, control a virtual car on a racecourse and identify an image or digit drawn on a screen. These chips completed them without needing specialized programs. The chips can also “learn” how to complete each task if trained. ...
... to play a game of Pong, control a virtual car on a racecourse and identify an image or digit drawn on a screen. These chips completed them without needing specialized programs. The chips can also “learn” how to complete each task if trained. ...

A Novel Method for Developing Robotics via Artificial Intelligence
... The first industrial robot using these principles was installed in 1961. These are the robots one knows from industrial facilities like car construction plants. The development of mobile robots was driven by the desire to automate transportation in production processes and autonomous transport syste ...
... The first industrial robot using these principles was installed in 1961. These are the robots one knows from industrial facilities like car construction plants. The development of mobile robots was driven by the desire to automate transportation in production processes and autonomous transport syste ...

Definition of a `Robot`
... Typically, hydraulic or pneumatic pistons move robot legs back and forth. The pistons attach to different leg segments just like muscles attach to different bones. It's a real trick getting all these pistons to work together properly. As a baby, your brain had to figure out exactly the right combina ...
... Typically, hydraulic or pneumatic pistons move robot legs back and forth. The pistons attach to different leg segments just like muscles attach to different bones. It's a real trick getting all these pistons to work together properly. As a baby, your brain had to figure out exactly the right combina ...

Building Like Animals: Using Autonomous Robots to
... agent is anything that can be viewed as perceiving its environment through sensors and acting upon that environment through actuators." [4] The purpose of such agents is not in replacing people but in being better, at least in some aspects, than biological systems, projecting human capabilities into ...
... agent is anything that can be viewed as perceiving its environment through sensors and acting upon that environment through actuators." [4] The purpose of such agents is not in replacing people but in being better, at least in some aspects, than biological systems, projecting human capabilities into ...
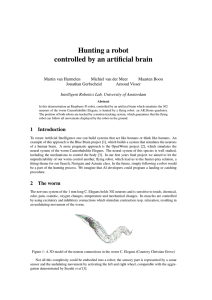
Hunting a robot controlled by an artificial brain
... For the demonstration we have the following requirements: a space of 4x4x3 meter is needed. The motion tracking system is mounted on poles around this area. For safety, we can guard the surroundings with curtains mounted on the poles, although the AR.Drone has its own safety mechanism. The ground ro ...
... For the demonstration we have the following requirements: a space of 4x4x3 meter is needed. The motion tracking system is mounted on poles around this area. For safety, we can guard the surroundings with curtains mounted on the poles, although the AR.Drone has its own safety mechanism. The ground ro ...
Proposal_4
... As a community, ignoring these problems does not help us advance our discipline. Instead, we suggest judicious use of human computation (wizards) and developing new techniques for problem satisficing as paths forward. We discuss these in further detail below. Solution 1: Judicious use of Wizard-of-Oz ...
... As a community, ignoring these problems does not help us advance our discipline. Instead, we suggest judicious use of human computation (wizards) and developing new techniques for problem satisficing as paths forward. We discuss these in further detail below. Solution 1: Judicious use of Wizard-of-Oz ...

Bibliography
... [27] Nelson, A.L., Grant, E., Galeotti, J.M., and Rhody, S. Maze exploration behaviors using an integrated evolutionary robotics environment, Robotics and Autonomous Systems 46, pp. 159-173, 2004 [28] von Neumann, J. and Morgenstern, O. Theory of Games and Economic Behavior, Princeton University Pre ...
... [27] Nelson, A.L., Grant, E., Galeotti, J.M., and Rhody, S. Maze exploration behaviors using an integrated evolutionary robotics environment, Robotics and Autonomous Systems 46, pp. 159-173, 2004 [28] von Neumann, J. and Morgenstern, O. Theory of Games and Economic Behavior, Princeton University Pre ...

How Many Robots Does it Take to Screw in a Lightbulb?
... The way robots communicate produces emergent behavior, and many systems can exploit this inherent behavior simply by using certain communication schemes. Even distributed systems that do not try to take advantage of emergent behavior find that their systems still exhibit such behavior[4]. There are ...
... The way robots communicate produces emergent behavior, and many systems can exploit this inherent behavior simply by using certain communication schemes. Even distributed systems that do not try to take advantage of emergent behavior find that their systems still exhibit such behavior[4]. There are ...

Behaviour mining for collision avoidance in multi
... in the physical world and in virtual settings. For example, gamers immersed in virtual environments simulating mobile agents can quickly identify potential collisions and effect evasive action. In a multi-robot system, avoiding collisions is a necessary behaviour as well. The work presented here tak ...
... in the physical world and in virtual settings. For example, gamers immersed in virtual environments simulating mobile agents can quickly identify potential collisions and effect evasive action. In a multi-robot system, avoiding collisions is a necessary behaviour as well. The work presented here tak ...
Use of robots in healthcare
... and acts: “Thus a robot must have sensors, processing ability that emulates some aspects of cognition, and actuators. Sensors are needed to obtain information from the environment. Reactive behaviors (like the stretch reflex in humans) do not require any deep cognitive ability, but on-board intellig ...
... and acts: “Thus a robot must have sensors, processing ability that emulates some aspects of cognition, and actuators. Sensors are needed to obtain information from the environment. Reactive behaviors (like the stretch reflex in humans) do not require any deep cognitive ability, but on-board intellig ...

Artificial Intelligence and Robotics
... The model of planning namely, choosing a sequence of actions that achieves a goal, has been extended and generalized ,and has been studied extensively by the AT community. Although the model is of some theoretical interest, it has not only been shown to be computationally intractable, but is conside ...
... The model of planning namely, choosing a sequence of actions that achieves a goal, has been extended and generalized ,and has been studied extensively by the AT community. Although the model is of some theoretical interest, it has not only been shown to be computationally intractable, but is conside ...
robotics - Suraj @ LUMS
... mechanized devices that perform human-like tasks. He has built automatic toys and mechanisms and imagined robots in drawings, books, plays and science fiction movies. ...
... mechanized devices that perform human-like tasks. He has built automatic toys and mechanisms and imagined robots in drawings, books, plays and science fiction movies. ...
03-Dr Hammad
... – Organizing operations – Aug 2001, AI beat humans in a simulated financial trading competition ...
... – Organizing operations – Aug 2001, AI beat humans in a simulated financial trading competition ...
Introduction to Multi
... time needed by the robot to explore the environment, the robot must be able to go to any selected place, trying to minimize a cost function (e.g. time, energy, etc). ...
... time needed by the robot to explore the environment, the robot must be able to go to any selected place, trying to minimize a cost function (e.g. time, energy, etc). ...
robot - kmutt-inc
... Karel Capek’s 1921 play RUR (Rossum’s Universal Robots) มาจากคาว่ า “rabota” (obligatory work) ...
... Karel Capek’s 1921 play RUR (Rossum’s Universal Robots) มาจากคาว่ า “rabota” (obligatory work) ...

AIReport
... Robotic factories are increasingly commonplace, especially in heavy manufacturing, where tolerance of repetitive movements, great strength, and untiring precision are more important than flexibility. Robots are especially useful in hazardous work, such as defusing bombs or handling radioactive mater ...
... Robotic factories are increasingly commonplace, especially in heavy manufacturing, where tolerance of repetitive movements, great strength, and untiring precision are more important than flexibility. Robots are especially useful in hazardous work, such as defusing bombs or handling radioactive mater ...

Exploring Artificial Intelligence Through Image Recognition
... but related tasks are given in order to accommodate students with various learning needs, such as their desire to learn AI through problem solving. This gives them exposure to computer vision, automatic reasoning, human robot interaction, and knowledge in computer science. The goal is to help studen ...
... but related tasks are given in order to accommodate students with various learning needs, such as their desire to learn AI through problem solving. This gives them exposure to computer vision, automatic reasoning, human robot interaction, and knowledge in computer science. The goal is to help studen ...
Paper Prototyping - SIUE Robotics - Southern Illinois University
... – Electrical Components – Mechanical Components – Computational Components ...
... – Electrical Components – Mechanical Components – Computational Components ...
teacher clues - ITGS Textbook
... 7. Simple logic: A form of logic in which there are only two values, such as true and false. 8. Fuzzy logic: A form of logic which can have many different values. 9. Heuristics: Rules used in artificial intelligence which are generally, but not always, true. 10. Infrared sensor: A common type of sen ...
... 7. Simple logic: A form of logic in which there are only two values, such as true and false. 8. Fuzzy logic: A form of logic which can have many different values. 9. Heuristics: Rules used in artificial intelligence which are generally, but not always, true. 10. Infrared sensor: A common type of sen ...
Types of Robots
... recurrent theme in science fiction since that time. The term androids is now generally reserved for human-like figures of this sort, ranging from electromechanical robots in human form to human-like creatures made entirely of biological materials. ...
... recurrent theme in science fiction since that time. The term androids is now generally reserved for human-like figures of this sort, ranging from electromechanical robots in human form to human-like creatures made entirely of biological materials. ...
Bio-inspired
... acting in the face of uncertain and unpredictable environments. It was reasoned that if a single robot required complex systems and techniques in order to perform in a reliable manner, then perhaps intelligent systems could be designed with many “simpler” robots using a minimalist approach to sensin ...
... acting in the face of uncertain and unpredictable environments. It was reasoned that if a single robot required complex systems and techniques in order to perform in a reliable manner, then perhaps intelligent systems could be designed with many “simpler” robots using a minimalist approach to sensin ...
Artificial Intelligence and Mobile Robots: Successes
... üHomogeneous robots üDivide-and-conquer tasks ...
... üHomogeneous robots üDivide-and-conquer tasks ...
Introduction to Swarm Robotics
... Shape - they must be uniform. This makes it easier to reconfigure and perform self repair. It would also be helpful if the shapes are optimized so that other physical structures or wiring can be easily included ...
... Shape - they must be uniform. This makes it easier to reconfigure and perform self repair. It would also be helpful if the shapes are optimized so that other physical structures or wiring can be easily included ...

00-2014
... • Attendance is taken each class, and together with participation it is worth 5% of the final grade. • You are considered absent at a lecture during which you watch a device (laptop/PDA/phone, etc.) or read a book. • Participation is a measure of your constructive involvement in the course: ...
... • Attendance is taken each class, and together with participation it is worth 5% of the final grade. • You are considered absent at a lecture during which you watch a device (laptop/PDA/phone, etc.) or read a book. • Participation is a measure of your constructive involvement in the course: ...
Robotics

Robotics is the branch of mechanical engineering, electrical engineering, electronic engineering and computer science that deals with the design, construction, operation, and application of robots, as well as computer systems for their control, sensory feedback, and information processing.These technologies deal with automated machines that can take the place of humans in dangerous environments or manufacturing processes, or resemble humans in appearance, behavior, and/or cognition. Many of today's robots are inspired by nature contributing to the field of bio-inspired robotics.The concept of creating machines that can operate autonomously dates back to classical times, but research into the functionality and potential uses of robots did not grow substantially until the 20th century. Throughout history, it has been frequently assumed that robots will one day be able to mimic human behavior and manage tasks in a human-like fashion. Today, robotics is a rapidly growing field, as technological advances continue; researching, designing, and building new robots serve various practical purposes, whether domestically, commercially, or militarily. Many robots do jobs that are hazardous to people such as defusing bombs, mines and exploring shipwrecks.