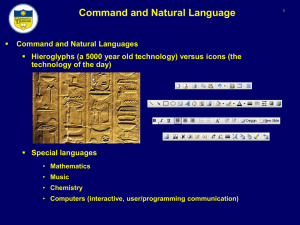
ppt - people.csail.mit.edu
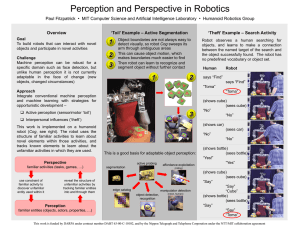
... Perception and Perspective in Robotics Paul Fitzpatrick • MIT Computer Science and Artificial Intelligence Laboratory • Humanoid Robotics Group Overview Goal To build robots that can interact with novel objects and participate in novel activities Challenge Machine perception can be robust for a spec ...
... Perception and Perspective in Robotics Paul Fitzpatrick • MIT Computer Science and Artificial Intelligence Laboratory • Humanoid Robotics Group Overview Goal To build robots that can interact with novel objects and participate in novel activities Challenge Machine perception can be robust for a spec ...
Intelligence without representation* Rodney A. Brooks
... blocks world. Now the blocks have slightly different shapes and colors, but their underlying semantics have not changed greatly. It could be argued that performing this abstraction (perception) for AI programs is merely the normal reductionist use of abstraction common in all good science. The abstr ...
... blocks world. Now the blocks have slightly different shapes and colors, but their underlying semantics have not changed greatly. It could be argued that performing this abstraction (perception) for AI programs is merely the normal reductionist use of abstraction common in all good science. The abstr ...

Toward a General Logicist Methodology for Engineering Ethically
... large part of the foundation of AI: the propositional calculus, and the predicate calculus, where the second subsumes the first. The latter is also known as ‘first-order logic,’ and sometimes just ‘FOL.’ Every introductory AI textbook provides an introduction to these systems, and makes it clear how ...
... large part of the foundation of AI: the propositional calculus, and the predicate calculus, where the second subsumes the first. The latter is also known as ‘first-order logic,’ and sometimes just ‘FOL.’ Every introductory AI textbook provides an introduction to these systems, and makes it clear how ...

Anthropomorphism: Opportunities and Challenges
... created a typology of signals and cues that robots emit during interaction and which can affect their perceived humanlikeness. Choi and Kim [41] proposed that anthropomorphism of robots involves: appearance, human–robot interaction, and the accordance of the two former measurements. The distinction ...
... created a typology of signals and cues that robots emit during interaction and which can affect their perceived humanlikeness. Choi and Kim [41] proposed that anthropomorphism of robots involves: appearance, human–robot interaction, and the accordance of the two former measurements. The distinction ...

Subdimensional Expansion and Optimal Task Reassignment
... and improves solution quality. In this paper, we describe a method for finding the optimal combination of task assignment and path. Task reassignment functions by maintaining a set of active task assignments Γ0 = {γ1 , . . .}, each conflated with an M* planner to solve the associated path planning p ...
... and improves solution quality. In this paper, we describe a method for finding the optimal combination of task assignment and path. Task reassignment functions by maintaining a set of active task assignments Γ0 = {γ1 , . . .}, each conflated with an M* planner to solve the associated path planning p ...

A Neural Network Based Navigation for Intelligent Autonomous
... Using these informations, we can construct the configuration space of the robot, in terms of which the path planning problem is formulated generally. A configuration or the workspace of the robot is described using a number of parameters. a configuration of a robot Translating in a two-dimensional w ...
... Using these informations, we can construct the configuration space of the robot, in terms of which the path planning problem is formulated generally. A configuration or the workspace of the robot is described using a number of parameters. a configuration of a robot Translating in a two-dimensional w ...

A Hierarchy of Reactive Behaviors Handles Complexity
... elementary behavior in the lower level is divided into two modules: the activation dynamics which at every time step determines whether or not the behavior tries to influence actuators, and the target dynamics, that describes strength and direction of that influence. Complex behaviors in the higher ...
... elementary behavior in the lower level is divided into two modules: the activation dynamics which at every time step determines whether or not the behavior tries to influence actuators, and the target dynamics, that describes strength and direction of that influence. Complex behaviors in the higher ...
document
... Field of Cognitive Science Get inside the human mind through Introspection Psychological Experiments ...
... Field of Cognitive Science Get inside the human mind through Introspection Psychological Experiments ...

cody8
... 16.Summarise and publish any methodological conclusions gained from the experience of relating different models. An important aspect of this project is the parallel trials of the models in both computer simulations and with socially situated robots. It has often been found that in the transference f ...
... 16.Summarise and publish any methodological conclusions gained from the experience of relating different models. An important aspect of this project is the parallel trials of the models in both computer simulations and with socially situated robots. It has often been found that in the transference f ...

1992 AAAI ROBOT EXHIBITION AND COMPETITION
... extremely healthy for the field, and future competitions—of which it is hoped there will be many—should continue to play off these very different approaches one against another in an effort to learn more about the basic tradeoffs. The competition drew a great deal of interest and enthusiasm among th ...
... extremely healthy for the field, and future competitions—of which it is hoped there will be many—should continue to play off these very different approaches one against another in an effort to learn more about the basic tradeoffs. The competition drew a great deal of interest and enthusiasm among th ...

Hybrid architectures
... learns map (including its charger location) then makes deliveries – continuously operating over two weeks in dynamic environment. ...
... learns map (including its charger location) then makes deliveries – continuously operating over two weeks in dynamic environment. ...

Cooperative Mobile Robotics
... other resources, and may be accompanied by studies of related issues such as correctness and fault-tolerance.1 Finally, definition (c) reflects a concern with quantified measures of cooperation, such as speedup in time to complete a task. Thus, in these definitions we see three fundamental seeds: th ...
... other resources, and may be accompanied by studies of related issues such as correctness and fault-tolerance.1 Finally, definition (c) reflects a concern with quantified measures of cooperation, such as speedup in time to complete a task. Thus, in these definitions we see three fundamental seeds: th ...
presentation
... (Agre & Chapman, 1987) AI has generally interpreted the organized nature of everyday activity in terms of plan-following. Nobody could doubt that people often make and follow plans. But the complexity, uncertainty, and immediacy of the real world require a central role for moment-to-moment improvisa ...
... (Agre & Chapman, 1987) AI has generally interpreted the organized nature of everyday activity in terms of plan-following. Nobody could doubt that people often make and follow plans. But the complexity, uncertainty, and immediacy of the real world require a central role for moment-to-moment improvisa ...

Anthropomorphism and The Social Robot
... are the motivation for social robot research, then people’s perceptual biases have an influence on how the robot is realised. The question arising in this paper is not how to avoid anthropomorphism, but rather how to embrace it in the field of social robots. Shneiderman takes the extreme view of the ...
... are the motivation for social robot research, then people’s perceptual biases have an influence on how the robot is realised. The question arising in this paper is not how to avoid anthropomorphism, but rather how to embrace it in the field of social robots. Shneiderman takes the extreme view of the ...
Housekeeping with Multiple Autonomous Robots: Representation
... room of the house). However, then the robots must communicate with each other to tidy the house collaboratively. For instance, if a robot cannot move a heavy object to its goal position, the robot may ask another robot for help. If the robot that cleans kitchen finds a book on the floor, then the ro ...
... room of the house). However, then the robots must communicate with each other to tidy the house collaboratively. For instance, if a robot cannot move a heavy object to its goal position, the robot may ask another robot for help. If the robot that cleans kitchen finds a book on the floor, then the ro ...

Soarian™ User Interface
... • Differences in interaction between anthropomorphic and non-anthropomorphic robots • Children with autism improve their social interaction skills and imitation skills when interacting with robots • https://www.youtube.com/watch?v=Fp8kndY5E84 • Some studies find that humanoid robots are overwhelming ...
... • Differences in interaction between anthropomorphic and non-anthropomorphic robots • Children with autism improve their social interaction skills and imitation skills when interacting with robots • https://www.youtube.com/watch?v=Fp8kndY5E84 • Some studies find that humanoid robots are overwhelming ...

1994 Consciousness
... favor. An empirical, though obviously weak, case against it might be found in the relatively poor accomplishments of current AI, if viewed from the psychologist's viewpoint: no existing system can be said to reach the level of complexity of even an insect. The hope is that this is not the symptom of ...
... favor. An empirical, though obviously weak, case against it might be found in the relatively poor accomplishments of current AI, if viewed from the psychologist's viewpoint: no existing system can be said to reach the level of complexity of even an insect. The hope is that this is not the symptom of ...

Reilly Hannah Reilly English 3200 Professor Clow November 24
... workers, businesses, and policymakers prepare for this new era” (Grobart). The robotic revolution does not need to destroy our world. With the right people behind this new technology, it can create jobs rather than eliminate them. There are still tasks that robots cannot perform and therefore humans ...
... workers, businesses, and policymakers prepare for this new era” (Grobart). The robotic revolution does not need to destroy our world. With the right people behind this new technology, it can create jobs rather than eliminate them. There are still tasks that robots cannot perform and therefore humans ...

Evolutionary Robotics
... [Origin of the word “artificial intelligence”] Proposal: “We propose that a 2 month, 10 man study of artificial intelligence be carried out during the summer of 1956 at Dartmouth College in Hanover, New Hampshire. The study is to proceed on the basis of the conjecture that ...
... [Origin of the word “artificial intelligence”] Proposal: “We propose that a 2 month, 10 man study of artificial intelligence be carried out during the summer of 1956 at Dartmouth College in Hanover, New Hampshire. The study is to proceed on the basis of the conjecture that ...
Soarian™ User Interface
... • Human-robot interaction (HRI) • The interdisciplinary study of interaction dynamics between humans and robots • Robots name first used by Capek’s in the play R.U.R. • http://www.youtube.com/watch?v=mEG7MhltHWk • Robots roles in today’s society • factory automation • service applications • medical ...
... • Human-robot interaction (HRI) • The interdisciplinary study of interaction dynamics between humans and robots • Robots name first used by Capek’s in the play R.U.R. • http://www.youtube.com/watch?v=mEG7MhltHWk • Robots roles in today’s society • factory automation • service applications • medical ...

cs.cmu.edu - Stanford Artificial Intelligence Laboratory
... communication make it difficult for robot teams to coordinate in tighty coupled tasks. Team members cannot simply apply single-robot solution techniques for partially observable problems in parallel because they do not take into account the recursive effect that reasoning about the beliefs of others ...
... communication make it difficult for robot teams to coordinate in tighty coupled tasks. Team members cannot simply apply single-robot solution techniques for partially observable problems in parallel because they do not take into account the recursive effect that reasoning about the beliefs of others ...
AI Armageddon and the Three Laws of Robotics
... In the late 1940’s a young author by the name of Isaac Asimov began writing a series of stories and novels about robots. That young man would go on to become one of the most prolific writers of all time and one of the corner stones of the science fiction genre. As the modern idea of a computer was s ...
... In the late 1940’s a young author by the name of Isaac Asimov began writing a series of stories and novels about robots. That young man would go on to become one of the most prolific writers of all time and one of the corner stones of the science fiction genre. As the modern idea of a computer was s ...
Cognitive Robotics - Cognitive Science Department
... • Typical robotics courses are about pixels and joint angles: fine for low-level image processing or solving multiple-degree-of-freedom motor control problems, but for Cognitive Robotics, I want to be able to tell the robot to “Pick up the red block” without having to worry about how it recognizes o ...
... • Typical robotics courses are about pixels and joint angles: fine for low-level image processing or solving multiple-degree-of-freedom motor control problems, but for Cognitive Robotics, I want to be able to tell the robot to “Pick up the red block” without having to worry about how it recognizes o ...

Potential Fields - UTK-EECS
... • Robot is treated as a point under the influence of an artificial potential field. – Generated robot movement is similar to a ball rolling down the hill – Goal generates attractive force – Obstacles are repulsive forces ...
... • Robot is treated as a point under the influence of an artificial potential field. – Generated robot movement is similar to a ball rolling down the hill – Goal generates attractive force – Obstacles are repulsive forces ...
Robotics

Robotics is the branch of mechanical engineering, electrical engineering, electronic engineering and computer science that deals with the design, construction, operation, and application of robots, as well as computer systems for their control, sensory feedback, and information processing.These technologies deal with automated machines that can take the place of humans in dangerous environments or manufacturing processes, or resemble humans in appearance, behavior, and/or cognition. Many of today's robots are inspired by nature contributing to the field of bio-inspired robotics.The concept of creating machines that can operate autonomously dates back to classical times, but research into the functionality and potential uses of robots did not grow substantially until the 20th century. Throughout history, it has been frequently assumed that robots will one day be able to mimic human behavior and manage tasks in a human-like fashion. Today, robotics is a rapidly growing field, as technological advances continue; researching, designing, and building new robots serve various practical purposes, whether domestically, commercially, or militarily. Many robots do jobs that are hazardous to people such as defusing bombs, mines and exploring shipwrecks.