
Controlling a mobile robot with Visual Prolog 7
... of a simple declarative model for controlling a technical object – a mobile robot, which was built at the Robotics and Artificial Intelligence Laboratory of the State Polytechnic Museum under Technics PhD Valery Karpov and Technics PhD Dmitry Dobrynin. Students and schoolchildren develop and program ...
... of a simple declarative model for controlling a technical object – a mobile robot, which was built at the Robotics and Artificial Intelligence Laboratory of the State Polytechnic Museum under Technics PhD Valery Karpov and Technics PhD Dmitry Dobrynin. Students and schoolchildren develop and program ...
MIT Mobile Robots - What`s Next? - DSpace@MIT
... performed in a distributed fashion. A recently developed light striper vision system will be able to provide depth maps in real time to enable parallel recognition of a number of different types of objects. Each object class has its own special processor to recognize it. When the table-like-object r ...
... performed in a distributed fashion. A recently developed light striper vision system will be able to provide depth maps in real time to enable parallel recognition of a number of different types of objects. Each object class has its own special processor to recognize it. When the table-like-object r ...
2015_0001_Vision for Curie and soccer
... The camera will be attached to the ceiling or will be in some position very high, as high as we can. We have done something similar but the robots were small. The camera should know x,y coordinates of every robot and its orientation (pose) Marie Curie does not change its main coordinates, so it is e ...
... The camera will be attached to the ceiling or will be in some position very high, as high as we can. We have done something similar but the robots were small. The camera should know x,y coordinates of every robot and its orientation (pose) Marie Curie does not change its main coordinates, so it is e ...

Module Specification
... and Grade-Related Criteria for module assessments will be made available to students prior to an assessment taking place. More information will be available from the module leader. The exam will take 120min. Feedback on assessment Following an assessment, students will be given their marks and feedb ...
... and Grade-Related Criteria for module assessments will be made available to students prior to an assessment taking place. More information will be available from the module leader. The exam will take 120min. Feedback on assessment Following an assessment, students will be given their marks and feedb ...

the first of a series of anthropomimetic musculoskeletal upper torsos
... in humans [1]. Typically these robots are designed according to the same engineering techniques that are used in industrial robots, as is shown by the characteristics of their bodies: they are heavy and stiff, and use precise and powerful motors to control joints with easily identifiable axes of rot ...
... in humans [1]. Typically these robots are designed according to the same engineering techniques that are used in industrial robots, as is shown by the characteristics of their bodies: they are heavy and stiff, and use precise and powerful motors to control joints with easily identifiable axes of rot ...

A framework for making sophisticated robotics accessible
... none of the code, and possibly little of the knowledge would transfer to a different platform. This situation is perhaps similar to the one in the early days of digital computers when every computer had a different architecture, a different assembly language, and even a different way of storing even ...
... none of the code, and possibly little of the knowledge would transfer to a different platform. This situation is perhaps similar to the one in the early days of digital computers when every computer had a different architecture, a different assembly language, and even a different way of storing even ...

Building a multimodal human-robot interface
... mean. And they usually don’t repeat them as if they were grammatical, such as “Did you say, ‘Go to the’?” They simply confirm that an utterance was perceived and ask for additional information through the oneword utterance “What?” Whenever the system obtains a grammatical utterance, the appropriaten ...
... mean. And they usually don’t repeat them as if they were grammatical, such as “Did you say, ‘Go to the’?” They simply confirm that an utterance was perceived and ask for additional information through the oneword utterance “What?” Whenever the system obtains a grammatical utterance, the appropriaten ...

Mapping Between Agent Architectures and Brain Organization
... consider the skill modules of CAA to correspond roughly to functional modularity, particularly in the neocortex, and perhaps to some extent to temporal modularity. However, there is no direct correlation between brain modularity and CAA skill modules. For example, a skill module for grasping a visua ...
... consider the skill modules of CAA to correspond roughly to functional modularity, particularly in the neocortex, and perhaps to some extent to temporal modularity. However, there is no direct correlation between brain modularity and CAA skill modules. For example, a skill module for grasping a visua ...

to get the file - Mechanical and Materials Engineering
... During the past twenty years the use of industrial robots that are equipped not only with precise motion control systems but also with sensors such as cameras, laser scanners, or tactile sensors that permit adaptation to a changing environment has increased dramatically. Intelligent robot products h ...
... During the past twenty years the use of industrial robots that are equipped not only with precise motion control systems but also with sensors such as cameras, laser scanners, or tactile sensors that permit adaptation to a changing environment has increased dramatically. Intelligent robot products h ...
Comp 1017 Robots
... 1. Robots are becoming commercially viable – need developers 2. Serious promise of Artificial Intelligence – needs researchers 3. Fundamental aspects : 1. Good vehicle for teaching programming … 2. Important analogy of each living being … the Self 3. Important analogy of societies … Communication ...
... 1. Robots are becoming commercially viable – need developers 2. Serious promise of Artificial Intelligence – needs researchers 3. Fundamental aspects : 1. Good vehicle for teaching programming … 2. Important analogy of each living being … the Self 3. Important analogy of societies … Communication ...

Artificial Neural Networks For Spatial Perception
... Our developmental approach uses machine learning to create a purely vision-based spatial perception. We use Artificial Neural Networks (ANN) to provide our humanoids with the ability to estimate the location of objects perceived by the robot’s cameras. There are various approaches of localising obje ...
... Our developmental approach uses machine learning to create a purely vision-based spatial perception. We use Artificial Neural Networks (ANN) to provide our humanoids with the ability to estimate the location of objects perceived by the robot’s cameras. There are various approaches of localising obje ...

A Robotic Ecosystem with Evolvable Minds and Bodies
... regular Evolutionary Algorithms to optimise controllers for robots with fixed morphologies [12], [13], [14]. To date there are no robotic systems where robots physically reproduce and create children with variation and heredity. There are systems with reproducing artificial creatures in simulation f ...
... regular Evolutionary Algorithms to optimise controllers for robots with fixed morphologies [12], [13], [14]. To date there are no robotic systems where robots physically reproduce and create children with variation and heredity. There are systems with reproducing artificial creatures in simulation f ...

Impossibles AIBO Four-Legged Team Description Paper
... In a real world robotics environment such as AIBO 4-legged league, agents have to have interactions with several physical objects, e.g. the orange ball. This interaction is typically implemented as a perception-action loop. AIBO Robots are equipped with sensors that perceive physical characteristics ...
... In a real world robotics environment such as AIBO 4-legged league, agents have to have interactions with several physical objects, e.g. the orange ball. This interaction is typically implemented as a perception-action loop. AIBO Robots are equipped with sensors that perceive physical characteristics ...
Operating in the Robot Matrix
... Robots have evolved from the earliest time of man. From the materials they are made from, purpose, functions, and the power source, there is no denying that then evolution of robotic design has influenced the development of society. Directions: In partners visit these three websites and then respond ...
... Robots have evolved from the earliest time of man. From the materials they are made from, purpose, functions, and the power source, there is no denying that then evolution of robotic design has influenced the development of society. Directions: In partners visit these three websites and then respond ...

30200385.pdf
... such an environment. The potential field methodology of MAPS is preferred over state based approaches in highly dynamic and competitive environments. The two inherent drawback effects of using potential fields, minima and oscillations, are not persistent due to the dynamic nature of the environment. ...
... such an environment. The potential field methodology of MAPS is preferred over state based approaches in highly dynamic and competitive environments. The two inherent drawback effects of using potential fields, minima and oscillations, are not persistent due to the dynamic nature of the environment. ...

A Cognitive Architecture for a Humanoid Robot: A First Approach
... Petri net based formulation of robotic tasks is quite popular for industrial robots especially for manufacturing tasks (see e.g. [29]). For intelligent robots and machines in general, implementations especially for the coordination layer have been proposed by [30]. But there exist only few papers us ...
... Petri net based formulation of robotic tasks is quite popular for industrial robots especially for manufacturing tasks (see e.g. [29]). For intelligent robots and machines in general, implementations especially for the coordination layer have been proposed by [30]. But there exist only few papers us ...
Encyclopedia of Artificial Intelligence
... structure of the controller and the controlled system. Designers of adaptive robots, however, should avoid implementing the robot’s control structure according to their understanding of the robot’s physics, but should endow the robot with means to acquire its own understanding through self-explorati ...
... structure of the controller and the controlled system. Designers of adaptive robots, however, should avoid implementing the robot’s control structure according to their understanding of the robot’s physics, but should endow the robot with means to acquire its own understanding through self-explorati ...
Term Project Color and Illumination Independent Landmark
... • Details of the descriptors are listed on the text area • Similar feature points are observed on different images even though the distance and angle values are different – Similarity is defined as the distance between feature points in 64 dimensional feature space ...
... • Details of the descriptors are listed on the text area • Similar feature points are observed on different images even though the distance and angle values are different – Similarity is defined as the distance between feature points in 64 dimensional feature space ...
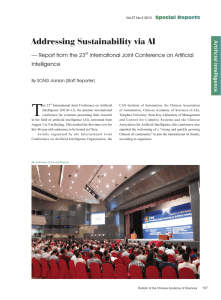
Addressing Sustainability via AI - Report from the 23rd International
... Scientists have endeavored to develop AI to a more advanced level where machines can be highly smart — say, as smart as humans. Some believe that it is only limited by ingenuity and physics, and progress seems to be accelerating, according to Stuart Russell, chair of the panel discussion, and scient ...
... Scientists have endeavored to develop AI to a more advanced level where machines can be highly smart — say, as smart as humans. Some believe that it is only limited by ingenuity and physics, and progress seems to be accelerating, according to Stuart Russell, chair of the panel discussion, and scient ...

Mazda Ahmadi
... [08/04 - present] Research Assistant to Dr. Peter Stone. I’m working on surveillance robots, multirobot systems, planning under uncertainty, and machine learning methods. For more detail see the publications. [07/00 to 06/03] Undergraduate research assistant of Prof. Jafar Habibi, Simulation lab, co ...
... [08/04 - present] Research Assistant to Dr. Peter Stone. I’m working on surveillance robots, multirobot systems, planning under uncertainty, and machine learning methods. For more detail see the publications. [07/00 to 06/03] Undergraduate research assistant of Prof. Jafar Habibi, Simulation lab, co ...
side event briefings - Campaign to Stop Killer Robots
... secure the 2008 Convention on Cluster Munitions. In 2014, Article 36 launched a pledge since signed by more than 50 individuals committing not participate in all-male panels on disarmament and security topics. @nashthomas @Article36 Miriam Struyk, PAX Ms. Struyk is program director for security and ...
... secure the 2008 Convention on Cluster Munitions. In 2014, Article 36 launched a pledge since signed by more than 50 individuals committing not participate in all-male panels on disarmament and security topics. @nashthomas @Article36 Miriam Struyk, PAX Ms. Struyk is program director for security and ...

here - FER
... to the complexity of this task, as agents need to learn unknown environment parameters while forming these local policies in an online fashion [12]. Although the agents in a system can be pre-programmed with a set of behaviours designed in advance, the learning of new behaviours online is often nece ...
... to the complexity of this task, as agents need to learn unknown environment parameters while forming these local policies in an online fashion [12]. Although the agents in a system can be pre-programmed with a set of behaviours designed in advance, the learning of new behaviours online is often nece ...

fitzpatrick2
... (Metta and Fitzpatrick, 2003). Development of new perceptual skills begins in earnest right from the beginning, in the following stages :Low-level vision – The robot’s low-level vision system is not complete upon startup. It has a filter which, by its construction, is fated to develop into an edge o ...
... (Metta and Fitzpatrick, 2003). Development of new perceptual skills begins in earnest right from the beginning, in the following stages :Low-level vision – The robot’s low-level vision system is not complete upon startup. It has a filter which, by its construction, is fated to develop into an edge o ...
Artificial Intelligence
... These cells are known as neurons, each of which may connect with up to 200,000 other neurons and the power of the brain comes from the huge numbers of these basic components and the multiple connections between them. ...
... These cells are known as neurons, each of which may connect with up to 200,000 other neurons and the power of the brain comes from the huge numbers of these basic components and the multiple connections between them. ...
Self-reconfiguring modular robot

Modular self-reconfiguring robotic systems or self-reconfigurable modular robots are autonomous kinematic machines with variable morphology. Beyond conventional actuation, sensing and control typically found in fixed-morphology robots, self-reconfiguring robots are also able to deliberately change their own shape by rearranging the connectivity of their parts, in order to adapt to new circumstances, perform new tasks, or recover from damage.For example, a robot made of such components could assume a worm-like shape to move through a narrow pipe, reassemble into something with spider-like legs to cross uneven terrain, then form a third arbitrary object (like a ball or wheel that can spin itself) to move quickly over a fairly flat terrain; it can also be used for making ""fixed"" objects, such as walls, shelters, or buildings.In some cases this involves each module having 2 or more connectors for connecting several together. They can contain electronics, sensors, computer processors, memory, and power supplies; they can also contain actuators that are used for manipulating their location in the environment and in relation with each other. A feature found in some cases is the ability of the modules to automatically connect and disconnect themselves to and from each other, and to form into many objects or perform many tasks moving or manipulating the environment.By saying ""self-reconfiguring"" or ""self-reconfigurable"" it means that the mechanism or device is capable of utilizing its own system of control such as with actuators or stochastic means to change its overall structural shape. Having the quality of being ""modular"" in ""self-reconfiguring modular robotics"" is to say that the same module or set of modules can be added to or removed from the system, as opposed to being generically ""modularized"" in the broader sense. The underlying intent is to have an indefinite number of identical modules, or a finite and relatively small set of identical modules, in a mesh or matrix structure of self-reconfigurable modules.Self-reconfiguration is also different from the concept of self-replication, and self-replication is not necessarily a quality that a self-reconfigurable module or collection of such modules can or must possess. A matrix of N-number of modules does not need to be able to increase the quantity of modules to greater than N to be considered self-reconfigurable. It is sufficient for self-reconfigurable modules to be a device that is produced at a conventional factory, where dedicated machines stamp or mold components, and factory workers on an assembly line assemble the components to build each module.There are two basic types of methods of segment articulation that self-reconfigurable mechanisms can utilize to reshape their structures, chain reconfiguration and lattice reconfiguration.