R The AAAI 2008 Robotics and Creativity
... intelligence, commonsense reasoning, and oftentimes novel solutions. By most definitions, creativity (the generation of novel and useful ideas) is necessary for intelligence; thus research efforts focusing on robotics and creativity are also efforts toward artificial intelligence. As robots and comp ...
... intelligence, commonsense reasoning, and oftentimes novel solutions. By most definitions, creativity (the generation of novel and useful ideas) is necessary for intelligence; thus research efforts focusing on robotics and creativity are also efforts toward artificial intelligence. As robots and comp ...
Towards the Evolution of Things
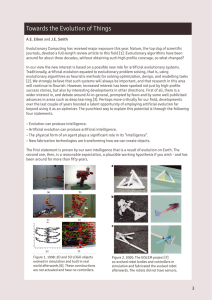
... The third statement reflects much more recent thinking [4], but raises the question of how we design both bodies and controllers. Designing these separately is a complex task, that becomes even more so when coupled. In the fourth lies part of the answer: if we can now rapidly and automatically fabri ...
... The third statement reflects much more recent thinking [4], but raises the question of how we design both bodies and controllers. Designing these separately is a complex task, that becomes even more so when coupled. In the fourth lies part of the answer: if we can now rapidly and automatically fabri ...

PDF
... tasks. Indeed forces play an important role in many skills that service robots should have, such as opening doors, pulling drawers, assembling things, and cutting slices of some foods, to name a few. We have proposed a learning framework7, where teacher demonstrations are encoded in a Hidden Markov ...
... tasks. Indeed forces play an important role in many skills that service robots should have, such as opening doors, pulling drawers, assembling things, and cutting slices of some foods, to name a few. We have proposed a learning framework7, where teacher demonstrations are encoded in a Hidden Markov ...

Elephants Don`t Play Chess
... representations grounded in the physical world. Our experience with this approach is that once this commitment is made, the need for traditional symbolic representations soon fades entirely. The key observation is that the world is its own best model. It is always exactly up to date. It always conta ...
... representations grounded in the physical world. Our experience with this approach is that once this commitment is made, the need for traditional symbolic representations soon fades entirely. The key observation is that the world is its own best model. It is always exactly up to date. It always conta ...

Elephants Don`t Play Chess - People.csail.mit.edu
... representations grounded in the physical world. Our experience with this approach is that once this commitment is made, the need for traditional symbolic representations soon fades entirely. The key observation is that the world is its own best model. It is always exactly up to date. It always conta ...
... representations grounded in the physical world. Our experience with this approach is that once this commitment is made, the need for traditional symbolic representations soon fades entirely. The key observation is that the world is its own best model. It is always exactly up to date. It always conta ...

MIT mobile robots-what`s next? - Cooperative Robotics Research
... desired directly, we hope to trade off computation for power consumption. Development of better algorithms can keep computational depth shallow and make this feasible (see [Brooks, Flynn and Marill 19871 for an example). A second strategy, one which aids in conserving real estate, is to be clever wi ...
... desired directly, we hope to trade off computation for power consumption. Development of better algorithms can keep computational depth shallow and make this feasible (see [Brooks, Flynn and Marill 19871 for an example). A second strategy, one which aids in conserving real estate, is to be clever wi ...

Artificial intelligence - Pérez
... In short, I believe that driverless cars present a superb opportunity and a test ground for developing the necessary regulation for AI. How do you expect regulation to develop as we move to greater reliance on robots and AI? As already mentioned, I believe that road and air traffic regulations will ...
... In short, I believe that driverless cars present a superb opportunity and a test ground for developing the necessary regulation for AI. How do you expect regulation to develop as we move to greater reliance on robots and AI? As already mentioned, I believe that road and air traffic regulations will ...
Introduction - Computer Science & Engineering
... – It is (most likely) a combination of “rabota” (obligatory work) and “robotnik” (serf) ...
... – It is (most likely) a combination of “rabota” (obligatory work) and “robotnik” (serf) ...

Dance Choreography Design of Humanoid Robots using Interactive
... C. Use of artificial intelligent methods in humanoid systems Artificial intelligence (AI) tries to make programs or computers do things that, when done by people, are described as having indicated intelligence. The goal of AI has been characterized as both the construction of useful intelligent syst ...
... C. Use of artificial intelligent methods in humanoid systems Artificial intelligence (AI) tries to make programs or computers do things that, when done by people, are described as having indicated intelligence. The goal of AI has been characterized as both the construction of useful intelligent syst ...
The 2000 AAAI Mobile Robot Competition and Exhibition
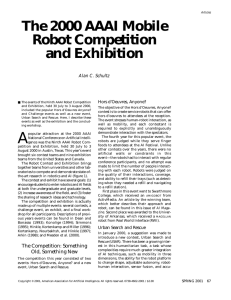
... rate map building and localization (Blitch, Sidki, and Durkin 2000; Blitch 1996). Being late in the year, I was uncertain how many teams might be attracted to the contest, but I felt that even with a small turnout, this event could be used to introduce the task to the AI community. Although a few te ...
... rate map building and localization (Blitch, Sidki, and Durkin 2000; Blitch 1996). Being late in the year, I was uncertain how many teams might be attracted to the contest, but I felt that even with a small turnout, this event could be used to introduce the task to the AI community. Although a few te ...
Artificial Intelligence Application Robotics - Celia`s e
... I feel that Artificial Intelligence is and can be beneficial enough that it is worth investing time, effort and funding into. We can save much time with frivolous matters like production and focus more of our time on serious matters that require our brains like cancer, world hunger and the greenhous ...
... I feel that Artificial Intelligence is and can be beneficial enough that it is worth investing time, effort and funding into. We can save much time with frivolous matters like production and focus more of our time on serious matters that require our brains like cancer, world hunger and the greenhous ...

Behavior-Based Artificial Intelligence
... Two approaches to AI Knowledge-Based AI Knowledge based systems have prior knowledge about the environment and there task. Behavior-Based AI React to there changing environment and goals They “behave” in a problem domain. ...
... Two approaches to AI Knowledge-Based AI Knowledge based systems have prior knowledge about the environment and there task. Behavior-Based AI React to there changing environment and goals They “behave” in a problem domain. ...

How engineeRing caRRied out tHe PRoject
... it is provided an outline of new robot generations and their industrial and biomedical applications. We consider the consequences of this new kind of technology on the notion of intelligence, stressing how the exteroceptive sensor systems provide a new bottom up approach to the AI debate. We conside ...
... it is provided an outline of new robot generations and their industrial and biomedical applications. We consider the consequences of this new kind of technology on the notion of intelligence, stressing how the exteroceptive sensor systems provide a new bottom up approach to the AI debate. We conside ...

Adaptive dynamical systems: A promising tool for embodied artificial
... In a “proof of principle” implementation in a simulation [2] we showed that we can extend a simple dynamical system (i.e. an oscillator) with an additional state variable and the corresponding evolution law (i.e. differential equation) in order to make it adaptive to a mechanical structure. The mech ...
... In a “proof of principle” implementation in a simulation [2] we showed that we can extend a simple dynamical system (i.e. an oscillator) with an additional state variable and the corresponding evolution law (i.e. differential equation) in order to make it adaptive to a mechanical structure. The mech ...

Togelius2005Forcing
... would best benefit a particular combination of task, environment and agent. This could be why these encodings, though mathematically elegant, have failed to scale up beyond very simple tasks, at least in neural network-based approaches. Furthermore, these encodings seem very poor at expressing re-us ...
... would best benefit a particular combination of task, environment and agent. This could be why these encodings, though mathematically elegant, have failed to scale up beyond very simple tasks, at least in neural network-based approaches. Furthermore, these encodings seem very poor at expressing re-us ...

Towards a theory of Hybrid Intelligent Autonomous Systems
... the path hence the robot must avoid these obstacles and plans a new path to achieve the task of navigation. The robot has to find a collision-free trajectory between the starting configuration and the goal configuration in a static or dynamic environment containing some obstacles. Moreover, when a r ...
... the path hence the robot must avoid these obstacles and plans a new path to achieve the task of navigation. The robot has to find a collision-free trajectory between the starting configuration and the goal configuration in a static or dynamic environment containing some obstacles. Moreover, when a r ...

PDF
... of the experience itself and be used afterwards for learning. For this, hierarchical planning has the benefit of providing additional levels of abstraction to the plan generation and the resulting plans itself. To change the robot’s behavior only additional methods need to be added to the planning d ...
... of the experience itself and be used afterwards for learning. For this, hierarchical planning has the benefit of providing additional levels of abstraction to the plan generation and the resulting plans itself. To change the robot’s behavior only additional methods need to be added to the planning d ...

Robotics - OMICS International
... OMICS Group welcomes submissions that are original and technically so as to serve both the developing world and developed countries in the best possible way. OMICS Journals are poised in excellence by publishing high quality research. OMICS Group follows an Editorial Manager® System peer review proc ...
... OMICS Group welcomes submissions that are original and technically so as to serve both the developing world and developed countries in the best possible way. OMICS Journals are poised in excellence by publishing high quality research. OMICS Group follows an Editorial Manager® System peer review proc ...

Definition of a `Robot`
... over. Similarly, a robot designer has to figure out the right combination of piston movements involved in walking and program this information into the robot's computer. Many mobile robots have a built-in balance system (a collection of gyroscopes, for example) that tells the computer when it needs ...
... over. Similarly, a robot designer has to figure out the right combination of piston movements involved in walking and program this information into the robot's computer. Many mobile robots have a built-in balance system (a collection of gyroscopes, for example) that tells the computer when it needs ...

Approved Module Information for Introduction to Computational
... * The distinctive properties of problems requiring CI applications and the techniques most appropriate for solving them. * Programming languages and their properties that make them particularly appropriate for CI applications. * The main application areas of CI and AI, their specific approaches, and ...
... * The distinctive properties of problems requiring CI applications and the techniques most appropriate for solving them. * Programming languages and their properties that make them particularly appropriate for CI applications. * The main application areas of CI and AI, their specific approaches, and ...

Poster Artificial Intelligence
... •St. Mary’s School faculty for supporting us throughout the research. ...
... •St. Mary’s School faculty for supporting us throughout the research. ...

An Ontology-Based Symbol Grounding System for Human
... Other HRI-oriented approaches focus on human-robot dialog. Zender et al. (2007) present an HRI architecture for human augmented mapping is used by a robot to improve its autonomously acquired metric map with qualitative information about locations and objects in the environment. Typically, such syst ...
... Other HRI-oriented approaches focus on human-robot dialog. Zender et al. (2007) present an HRI architecture for human augmented mapping is used by a robot to improve its autonomously acquired metric map with qualitative information about locations and objects in the environment. Typically, such syst ...

Planning for a Mobile Robot to Attend a Conference
... The AAAI Mobile Robot Challenge, introduced in 1999, is to have a robot start at the entrance of the conference site, find the registration desk, register, perform volunteer duties and give a presentation [6]. The long-term objective is to have robots receive no more information than usually given t ...
... The AAAI Mobile Robot Challenge, introduced in 1999, is to have a robot start at the entrance of the conference site, find the registration desk, register, perform volunteer duties and give a presentation [6]. The long-term objective is to have robots receive no more information than usually given t ...
Control architectures of a cognitive robot
... What to do about oscillations? 1. Explore randomness a little. It could take a lot of time to get out of the corner. 2. Keep a bit of history. E.g., remember where the robot turned last time = 1 bit of memory. ...
... What to do about oscillations? 1. Explore randomness a little. It could take a lot of time to get out of the corner. 2. Keep a bit of history. E.g., remember where the robot turned last time = 1 bit of memory. ...
Behavior-Based Robotics
... World models become outdated Search and planning takes too long Introduction to Robotics ...
... World models become outdated Search and planning takes too long Introduction to Robotics ...
Self-reconfiguring modular robot

Modular self-reconfiguring robotic systems or self-reconfigurable modular robots are autonomous kinematic machines with variable morphology. Beyond conventional actuation, sensing and control typically found in fixed-morphology robots, self-reconfiguring robots are also able to deliberately change their own shape by rearranging the connectivity of their parts, in order to adapt to new circumstances, perform new tasks, or recover from damage.For example, a robot made of such components could assume a worm-like shape to move through a narrow pipe, reassemble into something with spider-like legs to cross uneven terrain, then form a third arbitrary object (like a ball or wheel that can spin itself) to move quickly over a fairly flat terrain; it can also be used for making ""fixed"" objects, such as walls, shelters, or buildings.In some cases this involves each module having 2 or more connectors for connecting several together. They can contain electronics, sensors, computer processors, memory, and power supplies; they can also contain actuators that are used for manipulating their location in the environment and in relation with each other. A feature found in some cases is the ability of the modules to automatically connect and disconnect themselves to and from each other, and to form into many objects or perform many tasks moving or manipulating the environment.By saying ""self-reconfiguring"" or ""self-reconfigurable"" it means that the mechanism or device is capable of utilizing its own system of control such as with actuators or stochastic means to change its overall structural shape. Having the quality of being ""modular"" in ""self-reconfiguring modular robotics"" is to say that the same module or set of modules can be added to or removed from the system, as opposed to being generically ""modularized"" in the broader sense. The underlying intent is to have an indefinite number of identical modules, or a finite and relatively small set of identical modules, in a mesh or matrix structure of self-reconfigurable modules.Self-reconfiguration is also different from the concept of self-replication, and self-replication is not necessarily a quality that a self-reconfigurable module or collection of such modules can or must possess. A matrix of N-number of modules does not need to be able to increase the quantity of modules to greater than N to be considered self-reconfigurable. It is sufficient for self-reconfigurable modules to be a device that is produced at a conventional factory, where dedicated machines stamp or mold components, and factory workers on an assembly line assemble the components to build each module.There are two basic types of methods of segment articulation that self-reconfigurable mechanisms can utilize to reshape their structures, chain reconfiguration and lattice reconfiguration.