Slides - CSE IITK
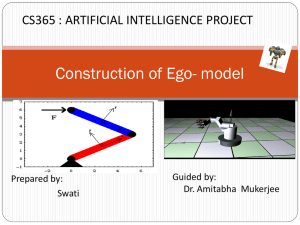
... Given two dimensional planar robot arm with camera at it’s tip and sensors on it’s skin ( using synthetic data) we have to Vision :Generate the images seen by the camera Sensor : To display that part of robot which touches the obstacle Manifold path planning Assume the world to be a two dimens ...
... Given two dimensional planar robot arm with camera at it’s tip and sensors on it’s skin ( using synthetic data) we have to Vision :Generate the images seen by the camera Sensor : To display that part of robot which touches the obstacle Manifold path planning Assume the world to be a two dimens ...

Agent-Based Hybrid Intelligent Systems and Their Dynamic
... • Avoid selection bias of certain feature evaluation method. • Allow different selection and evaluation methods to be integrated at ease. ...
... • Avoid selection bias of certain feature evaluation method. • Allow different selection and evaluation methods to be integrated at ease. ...

Developing Effective Robot Teammates for Human
... conveying internal knowledge and understanding. In particular, we focus on collaboration between a lead worker and robotic assistant, complementing prior work that develops collaborative robots as peers (Knepper et al. 2013) and those that learn from demonstration (Konidaris et al. 2011; Cakmak and ...
... conveying internal knowledge and understanding. In particular, we focus on collaboration between a lead worker and robotic assistant, complementing prior work that develops collaborative robots as peers (Knepper et al. 2013) and those that learn from demonstration (Konidaris et al. 2011; Cakmak and ...

Options for Stage II
... their comments to these reports • At the end of their module consultants write a ...
... their comments to these reports • At the end of their module consultants write a ...

Philosophy and History of AI
... Asimov’s Three Laws of Robotics: 1. A robot may not injure a human being or, through inaction, allow a human being to come to harm. 2. A robot must obey orders given it by human beings except where such orders would conflict with the First Law. 3. A robot must protect its own existence as long as su ...
... Asimov’s Three Laws of Robotics: 1. A robot may not injure a human being or, through inaction, allow a human being to come to harm. 2. A robot must obey orders given it by human beings except where such orders would conflict with the First Law. 3. A robot must protect its own existence as long as su ...

Slides
... Asimov’s Three Laws of Robotics: 1. A robot may not injure a human being or, through inaction, allow a human being to come to harm. 2. A robot must obey orders given it by human beings except where such orders would conflict with the First Law. 3. A robot must protect its own existence as long as su ...
... Asimov’s Three Laws of Robotics: 1. A robot may not injure a human being or, through inaction, allow a human being to come to harm. 2. A robot must obey orders given it by human beings except where such orders would conflict with the First Law. 3. A robot must protect its own existence as long as su ...
Oncosifter: A Customized Approach to Cancer Information
... Different user-friendly modules of interaction are available Only relevant information is displayed Multiple cancers of the same type are displayed together Consistency in layout Reduces cognitive load on user Similar interaction styles Ability to build personal profiles and customize it based on fe ...
... Different user-friendly modules of interaction are available Only relevant information is displayed Multiple cancers of the same type are displayed together Consistency in layout Reduces cognitive load on user Similar interaction styles Ability to build personal profiles and customize it based on fe ...
2008 Artificial Intelligence Conference 3
... mentoring have served a critical role in AI. This year, the conference will include a multi-event Teaching Forum that will bring together educators and researchers to share ideas and experiences about the teaching of AI.” Innovative Applications of AI Twenty-two innovative applications of AI will be ...
... mentoring have served a critical role in AI. This year, the conference will include a multi-event Teaching Forum that will bring together educators and researchers to share ideas and experiences about the teaching of AI.” Innovative Applications of AI Twenty-two innovative applications of AI will be ...

A Novel Method for Developing Robotics via Artificial Intelligence
... definition. But we can say, Internet of Things (IoT) paradigm, many of the objects which surround us will be on the network in one form or another. Radio Frequency IDentification (RFID) and sensors network technologies will rise to meet these new challenges, in which information and communication sy ...
... definition. But we can say, Internet of Things (IoT) paradigm, many of the objects which surround us will be on the network in one form or another. Radio Frequency IDentification (RFID) and sensors network technologies will rise to meet these new challenges, in which information and communication sy ...
Robotics? - OpenHouse @ DEIB
... Studying AI and Robotics … … gives you, in any case, all the basics of computer engineering, so it does not prevent your future work in the “traditional” computer engineering areas … makes you a specialist in techniques pervading all kind of applications, and are (and will be more and more) present ...
... Studying AI and Robotics … … gives you, in any case, all the basics of computer engineering, so it does not prevent your future work in the “traditional” computer engineering areas … makes you a specialist in techniques pervading all kind of applications, and are (and will be more and more) present ...

Real Robots Don`t Drive Straight
... specific to robotics. For example, Klassner describes a course he developed that builds upon agent paradigm popularized by Russell and Norvig (Klassner 2002). The content includes stimulous-response robots, sensor accuracy and functional simulation, robot odometry using encoders, and robot algorithm ...
... specific to robotics. For example, Klassner describes a course he developed that builds upon agent paradigm popularized by Russell and Norvig (Klassner 2002). The content includes stimulous-response robots, sensor accuracy and functional simulation, robot odometry using encoders, and robot algorithm ...

Developing Effective Robot Teammates for Human
... is critical. Thus, using a novel graph transformation algorithm, we are able to use these HTNs to build hierarchical, goal-centric (as opposed to environment-state centric) POMDPs that are used to infer co-workers’ intentions. Having developed the ability to transform a task into a hierarchical netw ...
... is critical. Thus, using a novel graph transformation algorithm, we are able to use these HTNs to build hierarchical, goal-centric (as opposed to environment-state centric) POMDPs that are used to infer co-workers’ intentions. Having developed the ability to transform a task into a hierarchical netw ...

Scythe AI: A Tool for Modular Reuse of Game AI
... the game developer, chiefly by reducing development time and cost. Without effective reuse, AI for non-player characters (NPCs) must be built from the ground up. Instead of perfecting high level behaviours, time is spent reimplementing basic functionalities. With Scythe AI, we seek to provide enable ...
... the game developer, chiefly by reducing development time and cost. Without effective reuse, AI for non-player characters (NPCs) must be built from the ground up. Instead of perfecting high level behaviours, time is spent reimplementing basic functionalities. With Scythe AI, we seek to provide enable ...
Use of robots in healthcare
... behaviors (like the stretch reflex in humans) do not require any deep cognitive ability, but on-board intelligence is necessary if the robot is to perform significant tasks autonomously, and actuation is needed to enable the robot to exert forces upon the environment. Generally, these forces will re ...
... behaviors (like the stretch reflex in humans) do not require any deep cognitive ability, but on-board intelligence is necessary if the robot is to perform significant tasks autonomously, and actuation is needed to enable the robot to exert forces upon the environment. Generally, these forces will re ...
Why Robot Nannies Probably Won`t Do Much Psychological Damage
... caring potential of their products, but rather will rapidly converge on under-representing ...
... caring potential of their products, but rather will rapidly converge on under-representing ...
School of Computer Science CAP-XXXX Introduction to Mobile
... Be familiar with the different problems and domains of applications in mobile robotics Understand different locomotion modalities of mobile robots. Be able to understand and derive kinematic models for wheeled robots Exposure to the different kind of sensors that are used in mobile robots Familiarit ...
... Be familiar with the different problems and domains of applications in mobile robotics Understand different locomotion modalities of mobile robots. Be able to understand and derive kinematic models for wheeled robots Exposure to the different kind of sensors that are used in mobile robots Familiarit ...
1.5 Impact of emerging technologies
... (able to make decisions typically made by a human). • The PR2 robot is being programmed to complete a number of specific tasks just like a human. • Deep Blue was a chess-playing computer developed by IBM. It is known for being the first piece of artificial intelligence to win both a chess game again ...
... (able to make decisions typically made by a human). • The PR2 robot is being programmed to complete a number of specific tasks just like a human. • Deep Blue was a chess-playing computer developed by IBM. It is known for being the first piece of artificial intelligence to win both a chess game again ...
Artificial Intelligence Brings Humanoid Robots to Life
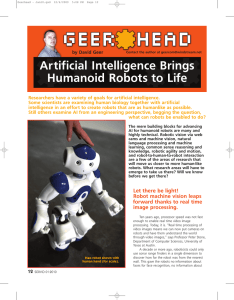
... Professor Stone. People would likely use their hands as bump sensors to sense objects and feel their way around the room. This would make moving around slow, complex, and herky-jerky. Humans can do a lot more if they are allowed to open their eyes and process vision in real time. So can robots. Robo ...
... Professor Stone. People would likely use their hands as bump sensors to sense objects and feel their way around the room. This would make moving around slow, complex, and herky-jerky. Humans can do a lot more if they are allowed to open their eyes and process vision in real time. So can robots. Robo ...

Behaviour mining for collision avoidance in multi
... Humans are very good at abstract spatial reasoning, both in the physical world and in virtual settings. For example, gamers immersed in virtual environments simulating mobile agents can quickly identify potential collisions and effect evasive action. In a multi-robot system, avoiding collisions is a ...
... Humans are very good at abstract spatial reasoning, both in the physical world and in virtual settings. For example, gamers immersed in virtual environments simulating mobile agents can quickly identify potential collisions and effect evasive action. In a multi-robot system, avoiding collisions is a ...

Notes on the recommended tracks
... related active interfaces. The student will have a good opportunity to understand the concepts that are necessary to build the necessary interfaces between computers via, , computer vision techniques, building the required hardware, etc. Design based on using knowledge-based systems will also be cov ...
... related active interfaces. The student will have a good opportunity to understand the concepts that are necessary to build the necessary interfaces between computers via, , computer vision techniques, building the required hardware, etc. Design based on using knowledge-based systems will also be cov ...

View PDF - Advances in Cognitive Systems
... create a 360◦ point cloud in real time, which greatly simplifies navigation and obstacle avoidance. In the DARPA Urban Challenge (DARPA, 2007), which was a precursor to Google’s car, teams that did not have a sensor capable of a 360◦ field of view were required to do much more reasoning about object ...
... create a 360◦ point cloud in real time, which greatly simplifies navigation and obstacle avoidance. In the DARPA Urban Challenge (DARPA, 2007), which was a precursor to Google’s car, teams that did not have a sensor capable of a 360◦ field of view were required to do much more reasoning about object ...
Types of Robots
... that are restricted merely to imitating the motions of living creatures. Some of the “robots” used in advertising and entertainment are actually automata, even with the addition of remote radio control. The term robot itself is derived from the Czech word robota, meaning “compulsory labour”. It was ...
... that are restricted merely to imitating the motions of living creatures. Some of the “robots” used in advertising and entertainment are actually automata, even with the addition of remote radio control. The term robot itself is derived from the Czech word robota, meaning “compulsory labour”. It was ...

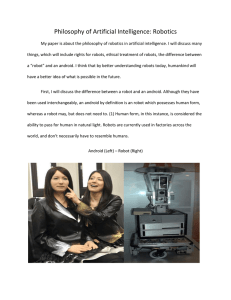
Philosophy of Artificial Intelligence: Robotics
... some level of freedom. And with this freedom, will robots act as humble servants, as benevolent protectors or the eventual destroyers of mankind? Given human nature, which will inevitably be programmed into robots, these machines might fill all of these positions, just as humans have in the past. I ...
... some level of freedom. And with this freedom, will robots act as humble servants, as benevolent protectors or the eventual destroyers of mankind? Given human nature, which will inevitably be programmed into robots, these machines might fill all of these positions, just as humans have in the past. I ...
Self-reconfiguring modular robot

Modular self-reconfiguring robotic systems or self-reconfigurable modular robots are autonomous kinematic machines with variable morphology. Beyond conventional actuation, sensing and control typically found in fixed-morphology robots, self-reconfiguring robots are also able to deliberately change their own shape by rearranging the connectivity of their parts, in order to adapt to new circumstances, perform new tasks, or recover from damage.For example, a robot made of such components could assume a worm-like shape to move through a narrow pipe, reassemble into something with spider-like legs to cross uneven terrain, then form a third arbitrary object (like a ball or wheel that can spin itself) to move quickly over a fairly flat terrain; it can also be used for making ""fixed"" objects, such as walls, shelters, or buildings.In some cases this involves each module having 2 or more connectors for connecting several together. They can contain electronics, sensors, computer processors, memory, and power supplies; they can also contain actuators that are used for manipulating their location in the environment and in relation with each other. A feature found in some cases is the ability of the modules to automatically connect and disconnect themselves to and from each other, and to form into many objects or perform many tasks moving or manipulating the environment.By saying ""self-reconfiguring"" or ""self-reconfigurable"" it means that the mechanism or device is capable of utilizing its own system of control such as with actuators or stochastic means to change its overall structural shape. Having the quality of being ""modular"" in ""self-reconfiguring modular robotics"" is to say that the same module or set of modules can be added to or removed from the system, as opposed to being generically ""modularized"" in the broader sense. The underlying intent is to have an indefinite number of identical modules, or a finite and relatively small set of identical modules, in a mesh or matrix structure of self-reconfigurable modules.Self-reconfiguration is also different from the concept of self-replication, and self-replication is not necessarily a quality that a self-reconfigurable module or collection of such modules can or must possess. A matrix of N-number of modules does not need to be able to increase the quantity of modules to greater than N to be considered self-reconfigurable. It is sufficient for self-reconfigurable modules to be a device that is produced at a conventional factory, where dedicated machines stamp or mold components, and factory workers on an assembly line assemble the components to build each module.There are two basic types of methods of segment articulation that self-reconfigurable mechanisms can utilize to reshape their structures, chain reconfiguration and lattice reconfiguration.