Intelligence without representation* Rodney A. Brooks
... blocks world. Now the blocks have slightly different shapes and colors, but their underlying semantics have not changed greatly. It could be argued that performing this abstraction (perception) for AI programs is merely the normal reductionist use of abstraction common in all good science. The abstr ...
... blocks world. Now the blocks have slightly different shapes and colors, but their underlying semantics have not changed greatly. It could be argued that performing this abstraction (perception) for AI programs is merely the normal reductionist use of abstraction common in all good science. The abstr ...

THE POTENTIAL OF ARTIFICIAL INTELLIGENCE IN SOUTH
... Flexible Manufacturing Systems require less skilled labour than conventional manufacturing for their real-time operation. However, highly skilled labour is needed for its implementation, maintenance and programming. It is socially important, especially in South Africa, not to utilize FMS's purely as ...
... Flexible Manufacturing Systems require less skilled labour than conventional manufacturing for their real-time operation. However, highly skilled labour is needed for its implementation, maintenance and programming. It is socially important, especially in South Africa, not to utilize FMS's purely as ...

To append for course “Soft computing”
... This course will provide students the basic concepts of different methods and tools of knowledge engineering for building of intelligent systems based on knowledge, such as, logic, rules, frames, semantic nets. The course will provide students the knowledge about applied intelligent systems. In part ...
... This course will provide students the basic concepts of different methods and tools of knowledge engineering for building of intelligent systems based on knowledge, such as, logic, rules, frames, semantic nets. The course will provide students the knowledge about applied intelligent systems. In part ...

Applied ontologies and standards for service robots
... • Between the 1960s and the ’90s, most robots – and robotics in general – were related to industrial applications. • robotic helpers are able to perform a wide range of tasks, such as healthcare and personal assistance. • These kinds of robots are commonly called service robots. Service robots typic ...
... • Between the 1960s and the ’90s, most robots – and robotics in general – were related to industrial applications. • robotic helpers are able to perform a wide range of tasks, such as healthcare and personal assistance. • These kinds of robots are commonly called service robots. Service robots typic ...
The History of Artificial Intelligence
... robota, meaning "work", while others propose that robota actually means "forced workers" or "slaves." This latter view would certainly fit the point that Capek was trying to make, because his robots eventually rebelled against their creators, ran amok, and tried to wipe out the human race. However, ...
... robota, meaning "work", while others propose that robota actually means "forced workers" or "slaves." This latter view would certainly fit the point that Capek was trying to make, because his robots eventually rebelled against their creators, ran amok, and tried to wipe out the human race. However, ...

Philosophy and History of AI
... Asimov’s Three Laws of Robotics: 1. A robot may not injure a human being or, through inaction, allow a human being to come to harm. 2. A robot must obey orders given it by human beings except where such orders would conflict with the First Law. 3. A robot must protect its own existence as long as su ...
... Asimov’s Three Laws of Robotics: 1. A robot may not injure a human being or, through inaction, allow a human being to come to harm. 2. A robot must obey orders given it by human beings except where such orders would conflict with the First Law. 3. A robot must protect its own existence as long as su ...
Robotic-Spring06-3
... World models become outdated Search and planning takes too long Robotics ...
... World models become outdated Search and planning takes too long Robotics ...
Com3240 Adaptive Intelligence - Department of Computer Science
... – Biologically inspired – Just inspired, or can it generate testable predictions? ...
... – Biologically inspired – Just inspired, or can it generate testable predictions? ...
Hypothesis Testing for Complex Agents
... added by difference in interpretation of a category can lose correlations between subjects that actually agree on the relative validity or likeability of two systems. Further, we would really prefer in many circumstances to have a continuous range of difference values. Such results can be provided b ...
... added by difference in interpretation of a category can lose correlations between subjects that actually agree on the relative validity or likeability of two systems. Further, we would really prefer in many circumstances to have a continuous range of difference values. Such results can be provided b ...
Making Robots and Making Robots Intelligent
... Objective: Autonomously track a line or follow a wall. ==> Intelligence (action, not comprehension or communication) accomplished by guidance, navigation and (feedback) control - GNC. ...
... Objective: Autonomously track a line or follow a wall. ==> Intelligence (action, not comprehension or communication) accomplished by guidance, navigation and (feedback) control - GNC. ...
File - Operating In The Robotic Matrix
... Today you will complete the build on your robot and test it’s buoyancy. The Operations in the Robotic Matrix Checklist is designed to help you accomplish the daily tasks with your robots. ...
... Today you will complete the build on your robot and test it’s buoyancy. The Operations in the Robotic Matrix Checklist is designed to help you accomplish the daily tasks with your robots. ...
The History of Artificial Intelligence
... robota, meaning "work", while others propose that robota actually means "forced workers" or "slaves." This latter view would certainly fit the point that Capek was trying to make, because his robots eventually rebelled against their creators, ran amok, and tried to wipe out the human race. However, ...
... robota, meaning "work", while others propose that robota actually means "forced workers" or "slaves." This latter view would certainly fit the point that Capek was trying to make, because his robots eventually rebelled against their creators, ran amok, and tried to wipe out the human race. However, ...

A Developmental Approach to Intelligence
... has a three dimensional physical structure in real space. Sensors: It is endowed with some sensory apparatus that is used to perceive its environment. Actuators: It is capable of physically changing the environment in some way, either by moving around or manipulating objects. Symbols: Modeling of th ...
... has a three dimensional physical structure in real space. Sensors: It is endowed with some sensory apparatus that is used to perceive its environment. Actuators: It is capable of physically changing the environment in some way, either by moving around or manipulating objects. Symbols: Modeling of th ...
Reasoning robot, involved tasks/modules and robot world
... Combines long and short time scales. ...
... Combines long and short time scales. ...
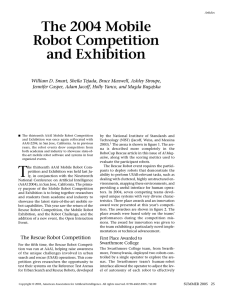
The 2004 Mobile Robot Competition and Exhibition
... interface is able both to respond to human inputs appropriately and to react with a display of appropriate emotions. The end result is that users spend an average of approximately 40 percent more time interacting with the system, with 92 percent of users reporting that they enjoyed their experience, ...
... interface is able both to respond to human inputs appropriately and to react with a display of appropriate emotions. The end result is that users spend an average of approximately 40 percent more time interacting with the system, with 92 percent of users reporting that they enjoyed their experience, ...
Non-Traditional Projects in the Undergraduate AI Course
... for both software development (especially suitable for difficult-toprogram applications or for customizing software) and building intelligent software (i.e., a tool for AI programming). Our projects emphasize the relationship between AI and computer science in general, and software development in pa ...
... for both software development (especially suitable for difficult-toprogram applications or for customizing software) and building intelligent software (i.e., a tool for AI programming). Our projects emphasize the relationship between AI and computer science in general, and software development in pa ...
An Abstract View on Modularity in Knowledge Representation
... Another class of modular knowledge representation formalisms combine logic programs with propositional theories. For example, satisfiability modulo ASP or SM(ASP) (Lierler and Truszczynski 2011), a formalism that is closely related to the logic PC(ID) (Mariën et al. 2008), combines a single proposi ...
... Another class of modular knowledge representation formalisms combine logic programs with propositional theories. For example, satisfiability modulo ASP or SM(ASP) (Lierler and Truszczynski 2011), a formalism that is closely related to the logic PC(ID) (Mariën et al. 2008), combines a single proposi ...
Do robots equal humans? Anthropomorphic terminology in LAWS
... facilitates human interaction with robots (for example, we can talk to robots) or a hindrance which leads robot users to create excessive expectations towards robots (for example, we expect robots to fully understand the human language and reasoning) [3]. The anthropomorphisation of military robots ...
... facilitates human interaction with robots (for example, we can talk to robots) or a hindrance which leads robot users to create excessive expectations towards robots (for example, we expect robots to fully understand the human language and reasoning) [3]. The anthropomorphisation of military robots ...

On Multi-Robot Area Coverage
... Reduced-CDT and Reduced-Vis based on the Constrained Delaunay Triangulation and the Visibility Graph are introduced so as to model the structure of the target area more efficiently. Also, due to the distributed characteristic of the coverage problem, another algorithm called Multi-Prim’s is applied ...
... Reduced-CDT and Reduced-Vis based on the Constrained Delaunay Triangulation and the Visibility Graph are introduced so as to model the structure of the target area more efficiently. Also, due to the distributed characteristic of the coverage problem, another algorithm called Multi-Prim’s is applied ...
Extending Player/Stage/Gazebo towards Cognitive
... simulation allows the user to explore system configurations and scales that are not physically realizable because the necessary hardware is not available. The simulation must present the user with the same interface as the real devices, so that moving an experiment between simulation and hardware is ...
... simulation allows the user to explore system configurations and scales that are not physically realizable because the necessary hardware is not available. The simulation must present the user with the same interface as the real devices, so that moving an experiment between simulation and hardware is ...
Adoption of Artificial Intelligence in Agriculture
... revealed that in 2005, from approximately 51% of farmers owning a computer and being connected to Internet, only 33% were using the computer for farm business. At the same time, only 5.3 % of dairy farmers were using computerized milking systems and 7.1% were using computerized feeding systems (Jeff ...
... revealed that in 2005, from approximately 51% of farmers owning a computer and being connected to Internet, only 33% were using the computer for farm business. At the same time, only 5.3 % of dairy farmers were using computerized milking systems and 7.1% were using computerized feeding systems (Jeff ...

Moral and ethical questions for robotics public policy
... centered,” (3) and do not reflect any explicit concern for the robot. Asimov’s Third Law, “A robot must protect its own existence as long as such protection does not conflict with the First or Second Law,” (3) offers the robot some measure of autonomy and dignity – but again only to a point that doe ...
... centered,” (3) and do not reflect any explicit concern for the robot. Asimov’s Third Law, “A robot must protect its own existence as long as such protection does not conflict with the First or Second Law,” (3) offers the robot some measure of autonomy and dignity – but again only to a point that doe ...

Borregos RoboCup Standard Platform League 2010 Team
... There are two ways for building motions, the first one is using hard coded sequences and the other one is directly controlling via an API the movement of each of the servo motors. Both methods include advantages and disadvantages. Hard coded sequences can be programmed by recording positions from th ...
... There are two ways for building motions, the first one is using hard coded sequences and the other one is directly controlling via an API the movement of each of the servo motors. Both methods include advantages and disadvantages. Hard coded sequences can be programmed by recording positions from th ...
Behavior-based robotics as a tool for synthesis of artificial behavior
... higher-level decision making14–19. Hybrid systems tend to separate the control system into two or more communicating but largely independent parts. Behavior-based systems are an alternative to hybrid systems; they enable fast real-time responses through simple reactive behaviors that directly link s ...
... higher-level decision making14–19. Hybrid systems tend to separate the control system into two or more communicating but largely independent parts. Behavior-based systems are an alternative to hybrid systems; they enable fast real-time responses through simple reactive behaviors that directly link s ...

Controlling a mobile robot with Visual Prolog 7
... of a simple declarative model for controlling a technical object – a mobile robot, which was built at the Robotics and Artificial Intelligence Laboratory of the State Polytechnic Museum under Technics PhD Valery Karpov and Technics PhD Dmitry Dobrynin. Students and schoolchildren develop and program ...
... of a simple declarative model for controlling a technical object – a mobile robot, which was built at the Robotics and Artificial Intelligence Laboratory of the State Polytechnic Museum under Technics PhD Valery Karpov and Technics PhD Dmitry Dobrynin. Students and schoolchildren develop and program ...
Self-reconfiguring modular robot

Modular self-reconfiguring robotic systems or self-reconfigurable modular robots are autonomous kinematic machines with variable morphology. Beyond conventional actuation, sensing and control typically found in fixed-morphology robots, self-reconfiguring robots are also able to deliberately change their own shape by rearranging the connectivity of their parts, in order to adapt to new circumstances, perform new tasks, or recover from damage.For example, a robot made of such components could assume a worm-like shape to move through a narrow pipe, reassemble into something with spider-like legs to cross uneven terrain, then form a third arbitrary object (like a ball or wheel that can spin itself) to move quickly over a fairly flat terrain; it can also be used for making ""fixed"" objects, such as walls, shelters, or buildings.In some cases this involves each module having 2 or more connectors for connecting several together. They can contain electronics, sensors, computer processors, memory, and power supplies; they can also contain actuators that are used for manipulating their location in the environment and in relation with each other. A feature found in some cases is the ability of the modules to automatically connect and disconnect themselves to and from each other, and to form into many objects or perform many tasks moving or manipulating the environment.By saying ""self-reconfiguring"" or ""self-reconfigurable"" it means that the mechanism or device is capable of utilizing its own system of control such as with actuators or stochastic means to change its overall structural shape. Having the quality of being ""modular"" in ""self-reconfiguring modular robotics"" is to say that the same module or set of modules can be added to or removed from the system, as opposed to being generically ""modularized"" in the broader sense. The underlying intent is to have an indefinite number of identical modules, or a finite and relatively small set of identical modules, in a mesh or matrix structure of self-reconfigurable modules.Self-reconfiguration is also different from the concept of self-replication, and self-replication is not necessarily a quality that a self-reconfigurable module or collection of such modules can or must possess. A matrix of N-number of modules does not need to be able to increase the quantity of modules to greater than N to be considered self-reconfigurable. It is sufficient for self-reconfigurable modules to be a device that is produced at a conventional factory, where dedicated machines stamp or mold components, and factory workers on an assembly line assemble the components to build each module.There are two basic types of methods of segment articulation that self-reconfigurable mechanisms can utilize to reshape their structures, chain reconfiguration and lattice reconfiguration.