
Autonomous Virtual Humans and Social Robots in Telepresence
... gestures, shapes, forces etc… • Generate Big Data that allows us to analyse and model events or predict the future using deep learning ...
... gestures, shapes, forces etc… • Generate Big Data that allows us to analyse and model events or predict the future using deep learning ...
Introduction to Swarm Robotics
... assembly robots”. Basically, these robots consists of modules, which, in response to environment, stimuli, or simulated pheromones [9], may reconfigure itself for some reason - such as getting around an obstacle. Richard Beck[3] explained the typical physical requirements for these robots: ...
... assembly robots”. Basically, these robots consists of modules, which, in response to environment, stimuli, or simulated pheromones [9], may reconfigure itself for some reason - such as getting around an obstacle. Richard Beck[3] explained the typical physical requirements for these robots: ...

The Hybrid Intelligent Systems group has developed robots that are
... The HIS group has developed robots that are capable of natural behaviour in everyday real world situations. This involves investigating many cognitive tasks, for example, navigation, language processing and visual recognition. In a number of projects we use our cognitive robots to study learning and ...
... The HIS group has developed robots that are capable of natural behaviour in everyday real world situations. This involves investigating many cognitive tasks, for example, navigation, language processing and visual recognition. In a number of projects we use our cognitive robots to study learning and ...
Evolutionary Robotics
... forms while learning how to walk, Robots have been evolved, spending less time in “infant” tadpole-like forms and more time in “adult” four-legged forms. ...
... forms while learning how to walk, Robots have been evolved, spending less time in “infant” tadpole-like forms and more time in “adult” four-legged forms. ...
Paper Prototyping - SIUE Robotics - Southern Illinois University
... Effort we are willing to put forth to get a task done (Saffo) Easier, familiar mechanical components Plug & Play feel to sensors Wide range of programming environments – Stability reduces overhead of support, malignance, and troubleshoot ...
... Effort we are willing to put forth to get a task done (Saffo) Easier, familiar mechanical components Plug & Play feel to sensors Wide range of programming environments – Stability reduces overhead of support, malignance, and troubleshoot ...

MAS_Notes
... Multi-Agent System Notes 1. An Application Science for Multi-Agent Systems, T.A. Wagner a. “A Complex Systems Perspective on Collaborative Design,” M. Klein, P. Faratin, H. Sayama, Y. Bar-Yam, pp. 77-93 Different aspects of design done so as to locally maximize module while meeting influence constra ...
... Multi-Agent System Notes 1. An Application Science for Multi-Agent Systems, T.A. Wagner a. “A Complex Systems Perspective on Collaborative Design,” M. Klein, P. Faratin, H. Sayama, Y. Bar-Yam, pp. 77-93 Different aspects of design done so as to locally maximize module while meeting influence constra ...
robot
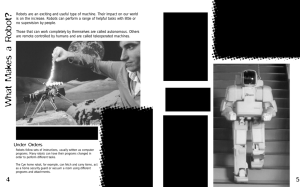
... is on the increase. Robots can perform a range of helpful tasks with little or no supervision by people. Those that can work completely by themselves are called autonomous. Others are remote controlled by humans and are called teleoperated machines. ...
... is on the increase. Robots can perform a range of helpful tasks with little or no supervision by people. Those that can work completely by themselves are called autonomous. Others are remote controlled by humans and are called teleoperated machines. ...

Intelligent Robotics and Multi-Agent Systems
... Multi-agent systems (MAS) are groups of intelligent agents that can perceive and act in a given environment to achieve their individual and collective goals. MAS enable solving problems that are beyond the individual capabilities and knowledge of single agents, not suffering from resource limitation ...
... Multi-agent systems (MAS) are groups of intelligent agents that can perceive and act in a given environment to achieve their individual and collective goals. MAS enable solving problems that are beyond the individual capabilities and knowledge of single agents, not suffering from resource limitation ...
LEGO Mindstorms Hitachi H8-based RCX brick
... general purpose computer, solves its first problem. ...
... general purpose computer, solves its first problem. ...

Inglés - Agrega
... One scientific team has said that it is possible that a robot brain will exist by 2019. Others predict robot intelligence breakthroughs by 2050. Recent advances have made robotic behavior more sophisticated. The social impact of intelligent robots is subject of a 2010 documentary film called Plug & ...
... One scientific team has said that it is possible that a robot brain will exist by 2019. Others predict robot intelligence breakthroughs by 2050. Recent advances have made robotic behavior more sophisticated. The social impact of intelligent robots is subject of a 2010 documentary film called Plug & ...
Artificial Intelligence & Robotics
... changes that occur in it Agency – A particular system composed of intelligent agents, such as computers or robots, that cooperate in order to solve a problem. Behavior Engineering – A methodology used to develop behaviorbased autonomous agents. ...
... changes that occur in it Agency – A particular system composed of intelligent agents, such as computers or robots, that cooperate in order to solve a problem. Behavior Engineering – A methodology used to develop behaviorbased autonomous agents. ...

Intelligent Mobile Robotics
... such as the Mars Rover, and entertainment robots such as AIBO. An “intelligent mobile robot” is an integrated mechanical, electrical, and computational system that can function autonomously in the physical world. Unbound from the shackles of the stationary desktop, a mobile robot must engender a var ...
... such as the Mars Rover, and entertainment robots such as AIBO. An “intelligent mobile robot” is an integrated mechanical, electrical, and computational system that can function autonomously in the physical world. Unbound from the shackles of the stationary desktop, a mobile robot must engender a var ...
Intelligent Mobile Robotics
... Living Autonomously • An autonomous robot acts on its own decisions • Robots are not directly controlled by humans – Can take input and advice from humans ...
... Living Autonomously • An autonomous robot acts on its own decisions • Robots are not directly controlled by humans – Can take input and advice from humans ...
Autonomous Intelligent Mobile Robotics Presentation
... Living Autonomously • An autonomous robot acts on its own decisions • Robots are not directly controlled by humans – Can take input and advice from humans ...
... Living Autonomously • An autonomous robot acts on its own decisions • Robots are not directly controlled by humans – Can take input and advice from humans ...
Special Session on Artificial Life and Computational Intelligence in
... Special Session on Artificial Life and Computational Intelligence in Robotics Hosted within ACALCI2015 http://newcastle.edu.au/ACALCI2015 Newcastle, Australia, Feb. 5-7, 2014 Papers Due: September 27, 2014 Scope Worldwide there is growing investment in the area of robotics with increasing interest i ...
... Special Session on Artificial Life and Computational Intelligence in Robotics Hosted within ACALCI2015 http://newcastle.edu.au/ACALCI2015 Newcastle, Australia, Feb. 5-7, 2014 Papers Due: September 27, 2014 Scope Worldwide there is growing investment in the area of robotics with increasing interest i ...
Artificial Intelligence and Robotics
... •Military – control and target identification •Entertainment – gaming or robotic pets •Predicting customer behavior •Speech recognition ...
... •Military – control and target identification •Entertainment – gaming or robotic pets •Predicting customer behavior •Speech recognition ...

the netherlands 26 - 30 JUne
... countries will compete with teams of fully autonomous robots in household and service tasks, rescue operations and of course: football. RoboCup is a great boost for research and development of robotics and artificial intelligence, to support us in our everyday lives in an ageing society. www.robocup ...
... countries will compete with teams of fully autonomous robots in household and service tasks, rescue operations and of course: football. RoboCup is a great boost for research and development of robotics and artificial intelligence, to support us in our everyday lives in an ageing society. www.robocup ...
Self-reconfiguring modular robot

Modular self-reconfiguring robotic systems or self-reconfigurable modular robots are autonomous kinematic machines with variable morphology. Beyond conventional actuation, sensing and control typically found in fixed-morphology robots, self-reconfiguring robots are also able to deliberately change their own shape by rearranging the connectivity of their parts, in order to adapt to new circumstances, perform new tasks, or recover from damage.For example, a robot made of such components could assume a worm-like shape to move through a narrow pipe, reassemble into something with spider-like legs to cross uneven terrain, then form a third arbitrary object (like a ball or wheel that can spin itself) to move quickly over a fairly flat terrain; it can also be used for making ""fixed"" objects, such as walls, shelters, or buildings.In some cases this involves each module having 2 or more connectors for connecting several together. They can contain electronics, sensors, computer processors, memory, and power supplies; they can also contain actuators that are used for manipulating their location in the environment and in relation with each other. A feature found in some cases is the ability of the modules to automatically connect and disconnect themselves to and from each other, and to form into many objects or perform many tasks moving or manipulating the environment.By saying ""self-reconfiguring"" or ""self-reconfigurable"" it means that the mechanism or device is capable of utilizing its own system of control such as with actuators or stochastic means to change its overall structural shape. Having the quality of being ""modular"" in ""self-reconfiguring modular robotics"" is to say that the same module or set of modules can be added to or removed from the system, as opposed to being generically ""modularized"" in the broader sense. The underlying intent is to have an indefinite number of identical modules, or a finite and relatively small set of identical modules, in a mesh or matrix structure of self-reconfigurable modules.Self-reconfiguration is also different from the concept of self-replication, and self-replication is not necessarily a quality that a self-reconfigurable module or collection of such modules can or must possess. A matrix of N-number of modules does not need to be able to increase the quantity of modules to greater than N to be considered self-reconfigurable. It is sufficient for self-reconfigurable modules to be a device that is produced at a conventional factory, where dedicated machines stamp or mold components, and factory workers on an assembly line assemble the components to build each module.There are two basic types of methods of segment articulation that self-reconfigurable mechanisms can utilize to reshape their structures, chain reconfiguration and lattice reconfiguration.