
Exploring coordination properties within populations of distributed agents Elizabeth Sklar
... virtual structure (where the robots together form a virtual, rigid structure of fixed geometric shape), and behavior-based (where each robot is given a set of low-level individual behaviors, such as “avoid obstacles”, and a set of high-level group goals, such as “surround a target”). Fierro et al. ( ...
... virtual structure (where the robots together form a virtual, rigid structure of fixed geometric shape), and behavior-based (where each robot is given a set of low-level individual behaviors, such as “avoid obstacles”, and a set of high-level group goals, such as “surround a target”). Fierro et al. ( ...
ppt - people.csail.mit.edu
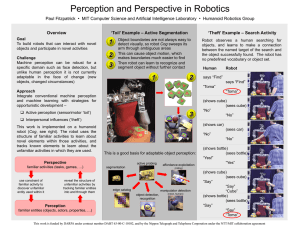
... individually are related and brought together. The first is active perception, where the robot employs motor action to reliably perceive properties of the world that it otherwise could not. The second is development, where experience is used to improve perception. The third is interpersonal influenc ...
... individually are related and brought together. The first is active perception, where the robot employs motor action to reliably perceive properties of the world that it otherwise could not. The second is development, where experience is used to improve perception. The third is interpersonal influenc ...
Aladdin Ayesh - Curriculum Vitae
... 2014 - now Head of Mobile Cognitive Systems group. 2010 – now Faculty of Technology Erasmus Coordinator this includes the following responsibilities: (a) programs leader for 4 Erasmus programs of which there are 3 undergraduate and 1 postgraduate, (b) Erasmus students’ mentor for all incoming studen ...
... 2014 - now Head of Mobile Cognitive Systems group. 2010 – now Faculty of Technology Erasmus Coordinator this includes the following responsibilities: (a) programs leader for 4 Erasmus programs of which there are 3 undergraduate and 1 postgraduate, (b) Erasmus students’ mentor for all incoming studen ...

Applying a natural intelligence pattern in cognitive robots
... state anxiety or tension. So, ‘id’ tries to resolve this tension created by the pleasure principle through the primary process, which means learning to find a suitable method to satisfy the needs. Based on this description, cognitive robots start moving in their surroundings at first, and as their e ...
... state anxiety or tension. So, ‘id’ tries to resolve this tension created by the pleasure principle through the primary process, which means learning to find a suitable method to satisfy the needs. Based on this description, cognitive robots start moving in their surroundings at first, and as their e ...

Knowledge Engineering Issues in Synthesis
... of knowledge. The Fred database takes advantage of this orthogonality by using an object-oriented description for modules, as does Palladio. We build a general-purpose set of measurement methods to answer fundamental queries, and build on top of these utilities procedural descriptions of specific m ...
... of knowledge. The Fred database takes advantage of this orthogonality by using an object-oriented description for modules, as does Palladio. We build a general-purpose set of measurement methods to answer fundamental queries, and build on top of these utilities procedural descriptions of specific m ...

"Computer Program Learns Language Rules and Composes
... It has long been the challenge of software programmers seeking to create devices capable of human interaction to impart to machines the ability to glean the subtleties of human communication, but insults and swear words also pose a unique challenge to make artificial intelligence agents with practic ...
... It has long been the challenge of software programmers seeking to create devices capable of human interaction to impart to machines the ability to glean the subtleties of human communication, but insults and swear words also pose a unique challenge to make artificial intelligence agents with practic ...
Neural Networks Coursework
... – Misclassified all 6 articulation vectors – SOM shows test numbers are similar in ‘sound’ to numbers in the training set – Combined SOM does not demonstrate ‘number line’ and cannot capitalise upon it ...
... – Misclassified all 6 articulation vectors – SOM shows test numbers are similar in ‘sound’ to numbers in the training set – Combined SOM does not demonstrate ‘number line’ and cannot capitalise upon it ...

An Emotional Mimicking Humanoid Biped Robot and its Quantum
... which will require powerful computers. Observe that while MIT Cog [27] planned to use interaction with environment as a base of learning, it has no walking capability, thus its access to environment is limited. On the other hand the walking robots such as Honda [28] have much developed walking abili ...
... which will require powerful computers. Observe that while MIT Cog [27] planned to use interaction with environment as a base of learning, it has no walking capability, thus its access to environment is limited. On the other hand the walking robots such as Honda [28] have much developed walking abili ...

Real Robots that Pass Human Tests of Self-Consciousness
... it wouldn’t really be you who steals the candy bar; rather, Black would be the blameworthy one; and this diagnosis presupposes self-consciousness, at least in some form. In addition, moral competence in a robot situated among humans clearly requires sophisticated and natural human-robot interaction, ...
... it wouldn’t really be you who steals the candy bar; rather, Black would be the blameworthy one; and this diagnosis presupposes self-consciousness, at least in some form. In addition, moral competence in a robot situated among humans clearly requires sophisticated and natural human-robot interaction, ...

AAAI 2001 Spring Symposium Series Reports
... of skill and tenacity, to wrestle softwolves into submission. Leino pointed out the need in the AI community for “sharpening” the blades, using an ...
... of skill and tenacity, to wrestle softwolves into submission. Leino pointed out the need in the AI community for “sharpening” the blades, using an ...

Learning Concepts by Interaction
... detect an obstacle in your path, you change direction or stop. As described, the concept "obstacle" doesn't exist for you, the robot. It exists for the person who wrote a function obstacle-in-path, not for you. You do not know that obstacles may sometimes be pushed aside, although you often push the ...
... detect an obstacle in your path, you change direction or stop. As described, the concept "obstacle" doesn't exist for you, the robot. It exists for the person who wrote a function obstacle-in-path, not for you. You do not know that obstacles may sometimes be pushed aside, although you often push the ...
![[pdf]](http://s1.studyres.com/store/data/018887346_1-24ac2154edb5ab6021ac764d0d6d8849-300x300.png)
[pdf]
... Static environment experiment. In the previous experiment, it is impossible to measure if the temporal predictions were actually correct, and if potential inaccuracies caused the robots’ estimate of who is quickest to be incorrect. Therefore a second experiment was conducted. The experimental set-up ...
... Static environment experiment. In the previous experiment, it is impossible to measure if the temporal predictions were actually correct, and if potential inaccuracies caused the robots’ estimate of who is quickest to be incorrect. Therefore a second experiment was conducted. The experimental set-up ...
intelligent robots: the question of embodiment
... valid to the reality of the application of the solution as they are quickly outdated in complex dynamic environments. A simple example of this would be a mobile robot undertaking a docking procedure for recharging. Odometric errors and the robot’s inability to drive exact and correct paths demonstra ...
... valid to the reality of the application of the solution as they are quickly outdated in complex dynamic environments. A simple example of this would be a mobile robot undertaking a docking procedure for recharging. Odometric errors and the robot’s inability to drive exact and correct paths demonstra ...

Knowledge Processing for Cognitive Robots
... modules and provides query and visualization interface, methods for loading external information, and several inference techniques. KnowRob provides an extensible knowledge-based framework that allows to integrate different kinds of knowledge (static encyclopedic knowledge, common-sense knowledge, t ...
... modules and provides query and visualization interface, methods for loading external information, and several inference techniques. KnowRob provides an extensible knowledge-based framework that allows to integrate different kinds of knowledge (static encyclopedic knowledge, common-sense knowledge, t ...
Robots and DSP methods: History and perspectives
... Computer vision includes cameras, which produce images over the same electromagnetic spectrum that humans see, to more exotic technologies: thermal sensors, X-rays, laser range finders, and synthetic aperature radar. computer vision is a separate field of study from robotics, and has produced many u ...
... Computer vision includes cameras, which produce images over the same electromagnetic spectrum that humans see, to more exotic technologies: thermal sensors, X-rays, laser range finders, and synthetic aperature radar. computer vision is a separate field of study from robotics, and has produced many u ...
KANTRA: Human-Machine Interaction for Intelligent Robots
... Although natural language processing and robotics constitute two major areas of AI, they have been studied rather independently. Only a few works are concerned with natural language access for human-machine-interaction and communication. Sondheimer [Sondheimer 76] focuses on the problem of spatial r ...
... Although natural language processing and robotics constitute two major areas of AI, they have been studied rather independently. Only a few works are concerned with natural language access for human-machine-interaction and communication. Sondheimer [Sondheimer 76] focuses on the problem of spatial r ...

Social Robots: Approaches and Conceptions in the Perspective of
... and cultural interfaces But what caused this rule of machines – from clocks to computers and robots? The simple answer would be: there are forces and facilities that the human can cope with only by delegating control to devices superior than man in some important functions. For example, long-term m ...
... and cultural interfaces But what caused this rule of machines – from clocks to computers and robots? The simple answer would be: there are forces and facilities that the human can cope with only by delegating control to devices superior than man in some important functions. For example, long-term m ...

TOWARDS THE DREAM OF AN INTELLIGENT, VISUALLY
... command the robot to open a door to a room, go to a table and pick up a few toys on top of it. The smart wheelchair must detect the door handle, grasp it accurately it so that it can be turned, maneuver so that the door is opened, navigate the doorway (often only a few centimeters wider than the whe ...
... command the robot to open a door to a room, go to a table and pick up a few toys on top of it. The smart wheelchair must detect the door handle, grasp it accurately it so that it can be turned, maneuver so that the door is opened, navigate the doorway (often only a few centimeters wider than the whe ...

Apprenticeship Scheduling for Human
... future work. First, domain experts may be able to manage resources equally well but do so in different ways. Prior work has reled on learning one model for each operator to account for inter-demonstrator disagreement (Sammut et al. 1992). In future work, I will investigate new computational methods ...
... future work. First, domain experts may be able to manage resources equally well but do so in different ways. Prior work has reled on learning one model for each operator to account for inter-demonstrator disagreement (Sammut et al. 1992). In future work, I will investigate new computational methods ...
How to keep robot/AI under control?
... AI. Rodney Brooks suggests that people really do not fully understand the concept of AI and are creating fearful scenarios that might not even be possible. Robotics pioneer Rodney Brooks say that people who fear a runaway AI misunderstand what computers are doing when we say they’re thinking or gett ...
... AI. Rodney Brooks suggests that people really do not fully understand the concept of AI and are creating fearful scenarios that might not even be possible. Robotics pioneer Rodney Brooks say that people who fear a runaway AI misunderstand what computers are doing when we say they’re thinking or gett ...

DIGITAL MAPPING HORIZONS THAT DESERVE THE
... The answer is going to be very precise with a good tracking output GIS module over proper and representative span of time. This subject is under investigation by the author in another research. 1.3.5 The Deleting Module DM concept is based on prior processing of old maps where their information and ...
... The answer is going to be very precise with a good tracking output GIS module over proper and representative span of time. This subject is under investigation by the author in another research. 1.3.5 The Deleting Module DM concept is based on prior processing of old maps where their information and ...

Associative memory properties of multiple cortical modules
... as inputs to each of the modules A and B, which are therefore denoted as input modules, C is a convergent module which receives paired inputs. Its patterns of sustained activity (due to its attractor network properties) are associated by Hebb-like modifiable synapses to the corresponding sustained a ...
... as inputs to each of the modules A and B, which are therefore denoted as input modules, C is a convergent module which receives paired inputs. Its patterns of sustained activity (due to its attractor network properties) are associated by Hebb-like modifiable synapses to the corresponding sustained a ...

Cognitive Systems: Insights, Examples, Systems — Report
... quite well in society when helped by appropriately designed cognitive systems. Mathematical or computational models of the brain and its cognitive processes combined with psychological treatment and robotics approaches led to several programs that use humanoid or animal-like robots to treat autism i ...
... quite well in society when helped by appropriately designed cognitive systems. Mathematical or computational models of the brain and its cognitive processes combined with psychological treatment and robotics approaches led to several programs that use humanoid or animal-like robots to treat autism i ...

Intelligence without representation
... I claim that AI researchers are guilty of the same (self) deception. They partition the problems they work on into two components. The AI component, which they solve, and the non-AI component which they don't solve. Typically, AI "succeeds" by defining the parts of the problem that are unsolved as n ...
... I claim that AI researchers are guilty of the same (self) deception. They partition the problems they work on into two components. The AI component, which they solve, and the non-AI component which they don't solve. Typically, AI "succeeds" by defining the parts of the problem that are unsolved as n ...
Self-reconfiguring modular robot

Modular self-reconfiguring robotic systems or self-reconfigurable modular robots are autonomous kinematic machines with variable morphology. Beyond conventional actuation, sensing and control typically found in fixed-morphology robots, self-reconfiguring robots are also able to deliberately change their own shape by rearranging the connectivity of their parts, in order to adapt to new circumstances, perform new tasks, or recover from damage.For example, a robot made of such components could assume a worm-like shape to move through a narrow pipe, reassemble into something with spider-like legs to cross uneven terrain, then form a third arbitrary object (like a ball or wheel that can spin itself) to move quickly over a fairly flat terrain; it can also be used for making ""fixed"" objects, such as walls, shelters, or buildings.In some cases this involves each module having 2 or more connectors for connecting several together. They can contain electronics, sensors, computer processors, memory, and power supplies; they can also contain actuators that are used for manipulating their location in the environment and in relation with each other. A feature found in some cases is the ability of the modules to automatically connect and disconnect themselves to and from each other, and to form into many objects or perform many tasks moving or manipulating the environment.By saying ""self-reconfiguring"" or ""self-reconfigurable"" it means that the mechanism or device is capable of utilizing its own system of control such as with actuators or stochastic means to change its overall structural shape. Having the quality of being ""modular"" in ""self-reconfiguring modular robotics"" is to say that the same module or set of modules can be added to or removed from the system, as opposed to being generically ""modularized"" in the broader sense. The underlying intent is to have an indefinite number of identical modules, or a finite and relatively small set of identical modules, in a mesh or matrix structure of self-reconfigurable modules.Self-reconfiguration is also different from the concept of self-replication, and self-replication is not necessarily a quality that a self-reconfigurable module or collection of such modules can or must possess. A matrix of N-number of modules does not need to be able to increase the quantity of modules to greater than N to be considered self-reconfigurable. It is sufficient for self-reconfigurable modules to be a device that is produced at a conventional factory, where dedicated machines stamp or mold components, and factory workers on an assembly line assemble the components to build each module.There are two basic types of methods of segment articulation that self-reconfigurable mechanisms can utilize to reshape their structures, chain reconfiguration and lattice reconfiguration.